JP7269000B2 - 基板載置方法、成膜方法、成膜装置、および有機elパネルの製造システム - Google Patents
基板載置方法、成膜方法、成膜装置、および有機elパネルの製造システム Download PDFInfo
- Publication number
- JP7269000B2 JP7269000B2 JP2018241977A JP2018241977A JP7269000B2 JP 7269000 B2 JP7269000 B2 JP 7269000B2 JP 2018241977 A JP2018241977 A JP 2018241977A JP 2018241977 A JP2018241977 A JP 2018241977A JP 7269000 B2 JP7269000 B2 JP 7269000B2
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- mask
- supporting portion
- pressing
- film forming
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000000758 substrate Substances 0.000 title claims description 571
- 238000000034 method Methods 0.000 title claims description 56
- 238000004519 manufacturing process Methods 0.000 title claims description 26
- 238000003384 imaging method Methods 0.000 claims description 104
- 238000003825 pressing Methods 0.000 claims description 58
- 230000015572 biosynthetic process Effects 0.000 claims description 46
- 239000000463 material Substances 0.000 claims description 27
- 238000012546 transfer Methods 0.000 claims description 18
- 238000000151 deposition Methods 0.000 claims description 11
- 238000005259 measurement Methods 0.000 claims description 10
- 239000011368 organic material Substances 0.000 claims description 6
- 230000007423 decrease Effects 0.000 claims description 4
- 239000010408 film Substances 0.000 description 124
- 210000000078 claw Anatomy 0.000 description 63
- 238000007740 vapor deposition Methods 0.000 description 50
- 230000007246 mechanism Effects 0.000 description 32
- 239000002585 base Substances 0.000 description 23
- 238000003860 storage Methods 0.000 description 15
- 230000003028 elevating effect Effects 0.000 description 14
- 230000003287 optical effect Effects 0.000 description 12
- 238000010586 diagram Methods 0.000 description 11
- 238000013519 translation Methods 0.000 description 11
- 230000008021 deposition Effects 0.000 description 10
- 238000012545 processing Methods 0.000 description 9
- 238000005452 bending Methods 0.000 description 8
- 238000006073 displacement reaction Methods 0.000 description 7
- 239000011521 glass Substances 0.000 description 7
- 238000005286 illumination Methods 0.000 description 6
- 230000006870 function Effects 0.000 description 5
- 230000001965 increasing effect Effects 0.000 description 5
- 230000002250 progressing effect Effects 0.000 description 5
- 238000010438 heat treatment Methods 0.000 description 4
- 239000010409 thin film Substances 0.000 description 4
- 230000007723 transport mechanism Effects 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 3
- 238000004891 communication Methods 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- 230000001360 synchronised effect Effects 0.000 description 3
- 238000001771 vacuum deposition Methods 0.000 description 3
- 239000003086 colorant Substances 0.000 description 2
- 239000005357 flat glass Substances 0.000 description 2
- 239000011888 foil Substances 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 230000015654 memory Effects 0.000 description 2
- 125000006850 spacer group Chemical group 0.000 description 2
- TVIVIEFSHFOWTE-UHFFFAOYSA-K tri(quinolin-8-yloxy)alumane Chemical compound [Al+3].C1=CN=C2C([O-])=CC=CC2=C1.C1=CN=C2C([O-])=CC=CC2=C1.C1=CN=C2C([O-])=CC=CC2=C1 TVIVIEFSHFOWTE-UHFFFAOYSA-K 0.000 description 2
- 239000003513 alkali Substances 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 238000005229 chemical vapour deposition Methods 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 230000008020 evaporation Effects 0.000 description 1
- 238000001704 evaporation Methods 0.000 description 1
- 229910010272 inorganic material Inorganic materials 0.000 description 1
- 239000011147 inorganic material Substances 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000007726 management method Methods 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 238000002156 mixing Methods 0.000 description 1
- 238000004544 sputter deposition Methods 0.000 description 1
- 239000012780 transparent material Substances 0.000 description 1
- 238000005019 vapor deposition process Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images


















Classifications
-
- C—CHEMISTRY; METALLURGY
- C23—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; CHEMICAL SURFACE TREATMENT; DIFFUSION TREATMENT OF METALLIC MATERIAL; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL; INHIBITING CORROSION OF METALLIC MATERIAL OR INCRUSTATION IN GENERAL
- C23C—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; SURFACE TREATMENT OF METALLIC MATERIAL BY DIFFUSION INTO THE SURFACE, BY CHEMICAL CONVERSION OR SUBSTITUTION; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL
- C23C14/00—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material
- C23C14/04—Coating on selected surface areas, e.g. using masks
- C23C14/042—Coating on selected surface areas, e.g. using masks using masks
-
- C—CHEMISTRY; METALLURGY
- C23—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; CHEMICAL SURFACE TREATMENT; DIFFUSION TREATMENT OF METALLIC MATERIAL; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL; INHIBITING CORROSION OF METALLIC MATERIAL OR INCRUSTATION IN GENERAL
- C23C—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; SURFACE TREATMENT OF METALLIC MATERIAL BY DIFFUSION INTO THE SURFACE, BY CHEMICAL CONVERSION OR SUBSTITUTION; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL
- C23C14/00—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material
- C23C14/22—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material characterised by the process of coating
- C23C14/24—Vacuum evaporation
-
- C—CHEMISTRY; METALLURGY
- C23—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; CHEMICAL SURFACE TREATMENT; DIFFUSION TREATMENT OF METALLIC MATERIAL; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL; INHIBITING CORROSION OF METALLIC MATERIAL OR INCRUSTATION IN GENERAL
- C23C—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; SURFACE TREATMENT OF METALLIC MATERIAL BY DIFFUSION INTO THE SURFACE, BY CHEMICAL CONVERSION OR SUBSTITUTION; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL
- C23C14/00—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material
- C23C14/22—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material characterised by the process of coating
- C23C14/50—Substrate holders
-
- C—CHEMISTRY; METALLURGY
- C23—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; CHEMICAL SURFACE TREATMENT; DIFFUSION TREATMENT OF METALLIC MATERIAL; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL; INHIBITING CORROSION OF METALLIC MATERIAL OR INCRUSTATION IN GENERAL
- C23C—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; SURFACE TREATMENT OF METALLIC MATERIAL BY DIFFUSION INTO THE SURFACE, BY CHEMICAL CONVERSION OR SUBSTITUTION; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL
- C23C14/00—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material
- C23C14/22—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material characterised by the process of coating
- C23C14/54—Controlling or regulating the coating process
-
- C—CHEMISTRY; METALLURGY
- C23—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; CHEMICAL SURFACE TREATMENT; DIFFUSION TREATMENT OF METALLIC MATERIAL; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL; INHIBITING CORROSION OF METALLIC MATERIAL OR INCRUSTATION IN GENERAL
- C23C—COATING METALLIC MATERIAL; COATING MATERIAL WITH METALLIC MATERIAL; SURFACE TREATMENT OF METALLIC MATERIAL BY DIFFUSION INTO THE SURFACE, BY CHEMICAL CONVERSION OR SUBSTITUTION; COATING BY VACUUM EVAPORATION, BY SPUTTERING, BY ION IMPLANTATION OR BY CHEMICAL VAPOUR DEPOSITION, IN GENERAL
- C23C14/00—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material
- C23C14/22—Coating by vacuum evaporation, by sputtering or by ion implantation of the coating forming material characterised by the process of coating
- C23C14/54—Controlling or regulating the coating process
- C23C14/542—Controlling the film thickness or evaporation rate
- C23C14/543—Controlling the film thickness or evaporation rate using measurement on the vapor source
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67242—Apparatus for monitoring, sorting or marking
- H01L21/67259—Position monitoring, e.g. misposition detection or presence detection
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/68—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for positioning, orientation or alignment
- H01L21/682—Mask-wafer alignment
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10K—ORGANIC ELECTRIC SOLID-STATE DEVICES
- H10K71/00—Manufacture or treatment specially adapted for the organic devices covered by this subclass
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10K—ORGANIC ELECTRIC SOLID-STATE DEVICES
- H10K71/00—Manufacture or treatment specially adapted for the organic devices covered by this subclass
- H10K71/10—Deposition of organic active material
- H10K71/16—Deposition of organic active material using physical vapour deposition [PVD], e.g. vacuum deposition or sputtering
- H10K71/166—Deposition of organic active material using physical vapour deposition [PVD], e.g. vacuum deposition or sputtering using selective deposition, e.g. using a mask
Description
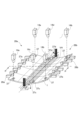
本実施例のアライメントを行う構成は、上述の主に図1~図8、図10(a)、(b)、(c)~図14(a)、(b)、(c)で説明したものと同じである。また、成膜システム全体は、図15に示した構成であるものとする。本実施例のアライメントで用いた基板1は、1500mm×925mm×厚さ0.5mmのガラス基板である。通常の生産においては基板1には有機ELディスプレイ用のTFTが形成されているが、本実施例においてはアライメント動作を検証すべく、アライメントマークと各電極パターンのみが無アルカリガラス状に形成された基板を用いた。
以下では、実施例1におけるアライメント動作を行った後の成膜動作を詳細に説明する。
Claims (16)
- 基板の第1辺に沿って基板を支持する、上下動可能な第1基板支持部と、
前記第1辺と対向する第2辺に沿って前記基板を支持する、上下動可能な第2基板支持部と、
前記基板の、前記第1辺および前記第2辺と交差する第3辺および第4辺を、前記基板の前記第1辺および前記第2辺の中間で支持する、第3基板支持部と、
前記基板を前記第1基板支持部に向かって押圧可能な第1押圧部と、
前記基板を前記第2基板支持部に向かって押圧可能な第2押圧部と、
前記基板を前記第3基板支持部に向かって押圧可能な第3押圧部と、
を用いて前記基板を移動させ、前記基板をマスクの上に載置する基板載置方法であって、
前記第1基板支持部と前記第2基板支持部とで前記基板を支持し、前記基板をその自重によって下方に凸なU字形状に撓んだ湾曲姿勢を形成する姿勢制御工程と、
前記U字形状の底部において、前記基板の前記第3基板支持部の側に設けられた基板のアライメントマークと前記マスクの前記第3基板支持部の側に設けられたマスクのアライメントマークとが共に撮像装置の被写界深度に含まれる状態を形成するように、前記基板を前記第3基板支持部および前記第3押圧部とによって保持し、かつ、前記第1基板支持部および前記第1押圧部と前記第2基板支持部および前記第2押圧部とによって前記基板の前記第1辺と前記第2辺とを保持し、前記湾曲姿勢を保って前記第1基板支持部、前記第2基板支持部および前記第3基板支持部を前記マスクに向かって下降させる基板下降工程と、
前記基板のアライメントマークと前記マスクのアライメントマークとを前記撮像装置により撮像して前記基板と前記マスクの相対位置情報を取得し、前記基板と前記マスクの位置ずれ量を計測する計測工程と、
前記計測工程で計測した前記位置ずれ量が所定のしきい値を超える場合、前記計測工程で取得した相対位置情報に基づき、前記基板と前記マスクの位置ずれ量が減少するように前記第1基板支持部、前記第2基板支持部および前記第3基板支持部によって前記基板を移動させるアライメント工程と、
前記計測工程で計測した前記位置ずれ量が所定のしきい値以下の場合、前記第1基板支持部、前記第2基板支持部および前記第3基板支持部により前記基板を前記マスクに向かって下降させ、前記基板を前記マスクに載置する載置工程と、を含み、
前記載置工程において、前記U字形状の底部の領域が前記基板と前記マスクとが接触する前に、前記第3基板支持部と前記第3押圧部とによる前記基板の押圧を解除する基板載置方法。 - 請求項1に記載の基板載置方法において、前記載置工程において、前記U字形状の底部の領域が前記基板と前記マスクとが接触する前に、前記第3基板支持部と前記第3押圧部とが前記基板を押圧する位置から退避可能に構成されている基板載置方法。
- 請求項1または2に記載の基板載置方法において、前記撮像装置により撮像される前記基板の撮像範囲が高低差1mm以内の範囲の部位を含む基板載置方法。
- 請求項1から3のいずれか1項に記載の基板載置方法において、前記基板のアライメントマークが、前記基板の前記第3辺および前記第4辺に沿ってそれぞれ配置された第1のアライメントマークおよび第2のアライメントマークを含み、前記第1のアライメントマークおよび第2のアライメントマークが、前記第1辺と前記第2辺との中心線に沿って配置される基板載置方法。
- 請求項1から3のいずれか1項に記載の基板載置方法において、前記基板のアライメントマークが、前記基板の前記第3辺および前記第4辺に沿ってそれぞれ配置された第1のアライメントマークおよび第2のアライメントマークを含み、前記第1のアライメントマークおよび第2のアライメントマークが、前記第1辺と前記第2辺との中心線の、前記第1辺の側と、前記第2辺の側と、にそれぞれ配置される基板載置方法。
- 請求項1から5のいずれか1項に記載の基板載置方法において、前記撮像装置が、前記第3基板支持部の上方に配置されている基板載置方法。
- 請求項1から6のいずれか1項に記載の基板載置方法において、前記載置工程の後、前記撮像装置、あるいはさらに前記基板の上部の他の部位に配置された他の撮像装置を用いて、前記基板と前記マスクとを撮像して取得した前記基板と前記マスクの相対位置情報に基づき、前記基板と前記マスクの位置ずれ量を取得し、計測した前記位置ずれ量が所定のしきい値を超える場合、前記第1基板支持部および前記第1押圧部と、前記第2基板支持部および前記第2押圧部と、を前記基板を押圧した状態で上昇させて前記基板を前記湾曲姿勢に移行させた後、前記第3押圧部で前記基板を押圧して、前記計測工程、前記アライメント工程、および前記載置工程を実行する基板載置方法。
- 請求項1から7のいずれか1項に記載の基板載置方法により前記基板を前記マスクに載置した後、前記基板に成膜材料を付着させる成膜工程を含む成膜方法。
- 基板の第1辺に沿って基板を支持する、上下動可能な第1基板支持部と、前記第1辺と対向する第2辺に沿って前記基板を支持する、上下動可能な第2基板支持部と、前記基板の、前記第1辺および前記第2辺と交差する第3辺および第4辺を、前記基板の前記第1辺および前記第2辺の中間で支持する、第3基板支持部と、前記基板を前記第1基板支持部に向かって押圧可能な第1押圧部と、前記基板を前記第2基板支持部に向かって押圧可能な第2押圧部と、前記基板を前記第3基板支持部に向かって押圧可能な第3押圧部と、マスクと、撮像装置と、成膜源と、制御部と、を備え、
前記制御部が、
前記第1基板支持部と前記第2基板支持部とで前記基板を支持し、前記基板をその自重によって下方に凸なU字形状に撓んだ湾曲姿勢を形成する姿勢制御工程と、
前記U字形状の底部において、前記基板の前記第3基板支持部の側に設けられた基板のアライメントマークと前記マスクの前記第3基板支持部の側に設けられたマスクのアライメントマークとが共に撮像装置の被写界深度に含まれる状態を形成するように、前記基板を前記第3基板支持部および前記第3押圧部とによって保持し、かつ、前記第1基板支持部および前記第1押圧部と前記第2基板支持部および前記第2押圧部とによって前記基板の前記第1辺と前記第2辺とを保持し、前記湾曲姿勢を保って前記第1基板支持部、前記第2基板支持部および前記第3基板支持部を前記マスクに向かって下降させる基板下降工程と、
前記基板のアライメントマークと前記マスクのアライメントマークとを前記撮像装置により撮像して前記基板と前記マスクの相対位置情報を取得し、前記基板と前記マスクの位置ずれ量を計測する計測工程と、
前記計測工程で計測した前記位置ずれ量が所定のしきい値を超える場合、前記計測工程で取得した相対位置情報に基づき、前記基板と前記マスクの位置ずれ量が減少するように前記第1基板支持部、前記第2基板支持部および前記第3基板支持部によって前記基板を移動させるアライメント工程と、
前記計測工程で計測した前記位置ずれ量が所定のしきい値以下の場合、前記第1基板支持部、前記第2基板支持部および前記第3基板支持部により前記基板を前記マスクに向かって下降させ、前記基板を前記マスクに載置する載置工程と、
前記載置工程の後、前記成膜源から前記基板に成膜材料を付着させて成膜する成膜工程と、を実行し、
前記載置工程において、前記U字形状の底部の領域が前記基板と前記マスクとが接触する前に、前記第3基板支持部と前記第3押圧部とによる前記基板の押圧を解除する成膜装置。 - 請求項9に記載の成膜装置において、前記載置工程において、前記U字形状の底部の領域が前記基板と前記マスクとが接触する前に、前記第3基板支持部と前記第3押圧部とが前記基板を押圧する位置から退避可能に構成されている成膜装置。
- 請求項9または10に記載の成膜装置において、前記撮像装置により撮像される前記基板の撮像範囲が高低差1mm以内の範囲の部位を含む成膜装置。
- 請求項9から11のいずれか1項に記載の成膜装置において、前記基板のアライメントマークが、前記基板の前記第3辺および前記第4辺に沿ってそれぞれ配置された第1のアライメントマークおよび第2のアライメントマークを含み、前記第1のアライメントマークおよび第2のアライメントマークが、前記第1辺と前記第2辺との中心線に沿って配置される成膜装置。
- 請求項9から11のいずれか1項に記載の成膜装置において、前記基板のアライメントマークが、前記基板の前記第3辺および前記第4辺に沿ってそれぞれ配置された第1のアライメントマークおよび第2のアライメントマークを含み、前記第1のアライメントマークおよび第2のアライメントマークが、前記第1辺と前記第2辺との中心線の、前記第1辺の側と、前記第2辺の側と、にそれぞれ配置される成膜装置。
- 請求項9から13のいずれか1項に記載の成膜装置において、前記撮像装置が、前記第3基板支持部の上方に配置されている成膜装置。
- 請求項9から14のいずれか1項に記載の成膜装置において、前記載置工程の後、前記撮像装置、あるいはさらに前記基板の上部の他の部位に配置された他の撮像装置を用いて、前記基板と前記マスクとを撮像して取得した前記基板と前記マスクの相対位置情報に基づき、前記基板と前記マスクの位置ずれ量を取得し、計測した前記位置ずれ量が所定のしきい値を超える場合、前記第1基板支持部および前記第1押圧部と、前記第2基板支持部および前記第2押圧部と、を前記基板を押圧した状態で上昇させて前記基板を前記湾曲姿勢に移行させた後、前記第3押圧部で前記基板を押圧して、前記計測工程、前記アライメント工程、および前記載置工程を実行する成膜装置。
- 請求項9から15のいずれか1項に記載の成膜装置を複数、備え、少なくとも1つの前記成膜装置が前記成膜工程において前記成膜源から前記基板に有機材料を蒸着する有機ELパネルの製造システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018241977A JP7269000B2 (ja) | 2018-12-26 | 2018-12-26 | 基板載置方法、成膜方法、成膜装置、および有機elパネルの製造システム |
| KR1020190164050A KR20200080148A (ko) | 2018-12-26 | 2019-12-10 | 기판 재치 방법, 성막 방법, 성막 장치, 및 유기 el 패널의 제조 시스템 |
| CN201911324615.9A CN111378932B (zh) | 2018-12-26 | 2019-12-20 | 基板载置方法、成膜方法、成膜装置及有机el面板的制造系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018241977A JP7269000B2 (ja) | 2018-12-26 | 2018-12-26 | 基板載置方法、成膜方法、成膜装置、および有機elパネルの製造システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2020105538A JP2020105538A (ja) | 2020-07-09 |
| JP2020105538A5 JP2020105538A5 (ja) | 2022-01-11 |
| JP7269000B2 true JP7269000B2 (ja) | 2023-05-08 |
Family
ID=71216906
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018241977A Active JP7269000B2 (ja) | 2018-12-26 | 2018-12-26 | 基板載置方法、成膜方法、成膜装置、および有機elパネルの製造システム |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP7269000B2 (ja) |
| KR (1) | KR20200080148A (ja) |
| CN (1) | CN111378932B (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7337108B2 (ja) * | 2021-01-28 | 2023-09-01 | キヤノントッキ株式会社 | アライメント装置、成膜装置および調整方法 |
| KR102549181B1 (ko) * | 2021-03-09 | 2023-06-29 | 피에스케이홀딩스 (주) | 기판 처리 장치 및 기판 처리 방법 |
| JP2024035289A (ja) * | 2022-09-02 | 2024-03-14 | キヤノントッキ株式会社 | 成膜装置、成膜装置の駆動方法、及び成膜方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009024208A (ja) | 2007-07-18 | 2009-02-05 | Fujifilm Corp | 蒸着装置及び蒸着方法並びにその方法を用いてパターン形成した層を有する電子素子及び有機エレクトロルミネッセンス素子 |
| JP2018197361A (ja) | 2017-05-22 | 2018-12-13 | キヤノントッキ株式会社 | 基板載置装置、成膜装置、基板載置方法、成膜方法、および電子デバイスの製造方法 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3789857B2 (ja) | 2002-06-25 | 2006-06-28 | トッキ株式会社 | 蒸着装置 |
| JP4510609B2 (ja) * | 2004-12-21 | 2010-07-28 | 株式会社アルバック | 基板とマスクのアライメント方法および有機薄膜蒸着方法ならびにアライメント装置 |
| JP4773834B2 (ja) | 2006-02-03 | 2011-09-14 | キヤノン株式会社 | マスク成膜方法およびマスク成膜装置 |
| CN101970707A (zh) * | 2007-12-27 | 2011-02-09 | 佳能安内华股份有限公司 | 处理装置及电子发射元件和有机el显示器的生产方法 |
| JP2010086809A (ja) * | 2008-09-30 | 2010-04-15 | Canon Anelva Corp | 保持装置、マスクのアライメント方法、基板処理装置、電子放出素子ディスプレイの生産方法及び有機elディスプレイの生産方法 |
| TW201336140A (zh) * | 2008-12-15 | 2013-09-01 | Hitachi High Tech Corp | 有機電激發光製造裝置及成膜裝置 |
| KR20150125935A (ko) * | 2013-02-26 | 2015-11-10 | 토레이 엔지니어링 컴퍼니, 리미티드 | 기판 처리 장치, 마스크의 세트 방법, 막 형성 장치 및 막 형성 방법 |
| JP6250999B2 (ja) * | 2013-09-27 | 2017-12-20 | キヤノントッキ株式会社 | アライメント方法並びにアライメント装置 |
| KR102091560B1 (ko) * | 2015-06-12 | 2020-03-20 | 가부시키가이샤 아루박 | 기판 보지 장치, 성막 장치 및 기판 보지 방법 |
| JP6468540B2 (ja) * | 2017-05-22 | 2019-02-13 | キヤノントッキ株式会社 | 基板搬送機構、基板載置機構、成膜装置及びそれらの方法 |
| JP6448067B2 (ja) * | 2017-05-22 | 2019-01-09 | キヤノントッキ株式会社 | 基板載置方法、基板載置機構、成膜方法、成膜装置及び電子デバイスの製造方法 |
| KR101866139B1 (ko) * | 2017-08-25 | 2018-06-08 | 캐논 톡키 가부시키가이샤 | 얼라인먼트 방법, 얼라인먼트 장치, 이를 포함하는 진공증착방법 및 진공증착장치 |
-
2018
- 2018-12-26 JP JP2018241977A patent/JP7269000B2/ja active Active
-
2019
- 2019-12-10 KR KR1020190164050A patent/KR20200080148A/ko unknown
- 2019-12-20 CN CN201911324615.9A patent/CN111378932B/zh active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009024208A (ja) | 2007-07-18 | 2009-02-05 | Fujifilm Corp | 蒸着装置及び蒸着方法並びにその方法を用いてパターン形成した層を有する電子素子及び有機エレクトロルミネッセンス素子 |
| JP2018197361A (ja) | 2017-05-22 | 2018-12-13 | キヤノントッキ株式会社 | 基板載置装置、成膜装置、基板載置方法、成膜方法、および電子デバイスの製造方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111378932A (zh) | 2020-07-07 |
| CN111378932B (zh) | 2023-11-10 |
| KR20200080148A (ko) | 2020-07-06 |
| JP2020105538A (ja) | 2020-07-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6999769B2 (ja) | 成膜装置、制御方法、及び電子デバイスの製造方法 | |
| JP6461235B2 (ja) | 基板載置装置、成膜装置、基板載置方法、成膜方法、および電子デバイスの製造方法 | |
| JP6724086B2 (ja) | アライメント方法、アライメント装置、これを含む真空蒸着方法及び真空蒸着装置 | |
| JP7247013B2 (ja) | アライメント方法、これを用いた蒸着方法及び電子デバイスの製造方法 | |
| JP6393802B1 (ja) | 基板載置装置、基板載置方法、成膜装置、成膜方法、アライメント装置、アライメント方法、および、電子デバイスの製造方法 | |
| JP7269000B2 (ja) | 基板載置方法、成膜方法、成膜装置、および有機elパネルの製造システム | |
| JP7170524B2 (ja) | 基板載置方法、成膜方法、成膜装置、有機elパネルの製造システム | |
| JP6468540B2 (ja) | 基板搬送機構、基板載置機構、成膜装置及びそれらの方法 | |
| JP7244401B2 (ja) | アライメント装置、成膜装置、アライメント方法、成膜方法、及び電子デバイスの製造方法 | |
| JP7374684B2 (ja) | 成膜装置および成膜方法、情報取得装置、アライメント方法、ならびに電子デバイスの製造装置および製造方法 | |
| JP7194006B2 (ja) | 基板載置方法、成膜方法、成膜装置、および有機elパネルの製造システム | |
| JP2019189922A (ja) | 成膜装置の調整方法、成膜方法、成膜装置、製造システム、有機elパネルの製造システム及び有機elパネルの製造方法 | |
| JP7001381B2 (ja) | アライメント方法、成膜方法、それを用いた電子デバイスの製造方法、アライメント装置、及び、それを備えた電子デバイスの製造装置 | |
| JP2020183546A (ja) | アライメント装置、成膜装置、アライメント方法、成膜方法および電子デバイスの製造方法 | |
| JP7202329B2 (ja) | アライメント装置、成膜装置、アライメント方法、電子デバイスの製造方法、プログラム及び記憶媒体 | |
| KR102625048B1 (ko) | 얼라인먼트 장치, 성막 장치, 얼라인먼트 방법, 전자 디바이스의 제조 방법, 프로그램, 및 기억 매체 | |
| KR102582584B1 (ko) | 얼라인먼트 장치, 성막 장치, 얼라인먼트 방법, 전자 디바이스의 제조 방법, 프로그램, 및 기억 매체 | |
| JP6821641B2 (ja) | 基板載置装置、成膜装置、基板載置方法、成膜方法、および電子デバイスの製造方法 | |
| JP7390822B2 (ja) | ティーチング装置、基板搬送装置、基板処理装置、ティーチング方法、及び電子デバイスの製造方法 | |
| WO2024034236A1 (ja) | アライメント装置、成膜装置、制御方法、電子デバイスの製造方法、プログラム及び記憶媒体 | |
| JP7337108B2 (ja) | アライメント装置、成膜装置および調整方法 | |
| JP2021073373A (ja) | 基板載置方法、電子デバイスの製造方法、基板保持装置、及び電子デバイスの製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20200804 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20200804 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211203 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211203 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20221006 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221101 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230411 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230421 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7269000 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |