JP7258755B2 - 可撓性器具挿入のための装置 - Google Patents
可撓性器具挿入のための装置 Download PDFInfo
- Publication number
- JP7258755B2 JP7258755B2 JP2019534667A JP2019534667A JP7258755B2 JP 7258755 B2 JP7258755 B2 JP 7258755B2 JP 2019534667 A JP2019534667 A JP 2019534667A JP 2019534667 A JP2019534667 A JP 2019534667A JP 7258755 B2 JP7258755 B2 JP 7258755B2
- Authority
- JP
- Japan
- Prior art keywords
- controller
- sheath
- sensor
- endoscope
- elongated body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003780 insertion Methods 0.000 title claims description 102
- 230000037431 insertion Effects 0.000 title claims description 102
- 238000000034 method Methods 0.000 claims description 60
- 230000033001 locomotion Effects 0.000 claims description 59
- 230000004044 response Effects 0.000 claims description 25
- 238000005259 measurement Methods 0.000 claims description 18
- 239000000835 fiber Substances 0.000 claims description 8
- 230000000694 effects Effects 0.000 claims description 5
- 230000008859 change Effects 0.000 description 44
- 230000008569 process Effects 0.000 description 25
- 230000003044 adaptive effect Effects 0.000 description 19
- 238000001514 detection method Methods 0.000 description 17
- 230000003287 optical effect Effects 0.000 description 15
- 238000001356 surgical procedure Methods 0.000 description 15
- 230000006870 function Effects 0.000 description 14
- 210000004072 lung Anatomy 0.000 description 14
- 210000003484 anatomy Anatomy 0.000 description 13
- 230000007246 mechanism Effects 0.000 description 12
- 238000003384 imaging method Methods 0.000 description 10
- 230000005672 electromagnetic field Effects 0.000 description 9
- 238000002591 computed tomography Methods 0.000 description 8
- 238000005452 bending Methods 0.000 description 7
- 239000013307 optical fiber Substances 0.000 description 7
- 238000013519 translation Methods 0.000 description 7
- 238000012545 processing Methods 0.000 description 6
- 239000013598 vector Substances 0.000 description 6
- 230000006378 damage Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 238000001839 endoscopy Methods 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 208000027418 Wounds and injury Diseases 0.000 description 3
- 238000013459 approach Methods 0.000 description 3
- 230000006399 behavior Effects 0.000 description 3
- 238000013461 design Methods 0.000 description 3
- 230000005484 gravity Effects 0.000 description 3
- 208000014674 injury Diseases 0.000 description 3
- 230000003902 lesion Effects 0.000 description 3
- 238000010801 machine learning Methods 0.000 description 3
- 238000000985 reflectance spectrum Methods 0.000 description 3
- 229910000831 Steel Inorganic materials 0.000 description 2
- 238000003491 array Methods 0.000 description 2
- 208000006673 asthma Diseases 0.000 description 2
- 238000001574 biopsy Methods 0.000 description 2
- 210000000621 bronchi Anatomy 0.000 description 2
- 239000003086 colorant Substances 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000009826 distribution Methods 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 230000007935 neutral effect Effects 0.000 description 2
- 238000012014 optical coherence tomography Methods 0.000 description 2
- 238000005457 optimization Methods 0.000 description 2
- 210000000056 organ Anatomy 0.000 description 2
- 238000005381 potential energy Methods 0.000 description 2
- 238000001454 recorded image Methods 0.000 description 2
- 239000010959 steel Substances 0.000 description 2
- 210000003437 trachea Anatomy 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- 229920000049 Carbon (fiber) Polymers 0.000 description 1
- 206010020751 Hypersensitivity Diseases 0.000 description 1
- 229920000271 Kevlar® Polymers 0.000 description 1
- 241000699670 Mus sp. Species 0.000 description 1
- 208000012287 Prolapse Diseases 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 210000000436 anus Anatomy 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 238000004422 calculation algorithm Methods 0.000 description 1
- 239000004917 carbon fiber Substances 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 239000003795 chemical substances by application Substances 0.000 description 1
- 210000001072 colon Anatomy 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000005094 computer simulation Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000007418 data mining Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 210000003414 extremity Anatomy 0.000 description 1
- 230000008570 general process Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 239000004761 kevlar Substances 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- VNWKTOKETHGBQD-UHFFFAOYSA-N methane Chemical compound C VNWKTOKETHGBQD-UHFFFAOYSA-N 0.000 description 1
- 210000000214 mouth Anatomy 0.000 description 1
- 230000002685 pulmonary effect Effects 0.000 description 1
- 238000000611 regression analysis Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 229910001220 stainless steel Inorganic materials 0.000 description 1
- 239000010935 stainless steel Substances 0.000 description 1
- 238000007619 statistical method Methods 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 238000011282 treatment Methods 0.000 description 1
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 1
- 229910052721 tungsten Inorganic materials 0.000 description 1
- 239000010937 tungsten Substances 0.000 description 1
- 210000003708 urethra Anatomy 0.000 description 1
- 238000009423 ventilation Methods 0.000 description 1
- 210000000707 wrist Anatomy 0.000 description 1
Images































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0113—Mechanical advancing means, e.g. catheter dispensers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M25/0133—Tip steering devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
- B25J9/1633—Programme controls characterised by the control loop compliant, force, torque control, e.g. combined with position control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
- B25J9/1689—Teleoperation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00115—Electrical control of surgical instruments with audible or visual output
- A61B2017/00119—Electrical control of surgical instruments with audible or visual output alarm; indicating an abnormal situation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00115—Electrical control of surgical instruments with audible or visual output
- A61B2017/00119—Electrical control of surgical instruments with audible or visual output alarm; indicating an abnormal situation
- A61B2017/00123—Electrical control of surgical instruments with audible or visual output alarm; indicating an abnormal situation and automatic shutdown
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00743—Type of operation; Specification of treatment sites
- A61B2017/00809—Lung operations
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/22—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for
- A61B2017/22072—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for with an instrument channel, e.g. for replacing one instrument by the other
- A61B2017/22074—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for with an instrument channel, e.g. for replacing one instrument by the other the instrument being only slidable in a channel, e.g. advancing optical fibre through a channel
- A61B2017/22075—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for with an instrument channel, e.g. for replacing one instrument by the other the instrument being only slidable in a channel, e.g. advancing optical fibre through a channel with motorized advancing or retracting means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2061—Tracking techniques using shape-sensors, e.g. fiber shape sensors with Bragg gratings
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/301—Surgical robots for introducing or steering flexible instruments inserted into the body, e.g. catheters or endoscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/303—Surgical robots specifically adapted for manipulations within body lumens, e.g. within lumen of gut, spine, or blood vessels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
- A61B2034/715—Cable tensioning mechanisms for removing slack
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/067—Measuring instruments not otherwise provided for for measuring angles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/0105—Steering means as part of the catheter or advancing means; Markers for positioning
- A61M2025/0166—Sensors, electrodes or the like for guiding the catheter to a target zone, e.g. image guided or magnetically guided
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40223—If insertion force to high, alarm, stop for operator assistance
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/45—Nc applications
- G05B2219/45118—Endoscopic, laparoscopic manipulator
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Veterinary Medicine (AREA)
- Animal Behavior & Ethology (AREA)
- Robotics (AREA)
- Molecular Biology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- Mechanical Engineering (AREA)
- Biophysics (AREA)
- Pulmonology (AREA)
- Anesthesiology (AREA)
- Hematology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Pathology (AREA)
- Endoscopes (AREA)
- Manipulator (AREA)
- Auxiliary Devices For And Details Of Packaging Control (AREA)
Description
本出願は、「DETECTING ENDOLUMENAL BUCKLING OF
FLEXIBLE INSTRUMENTS」と題され2016年12月28日に出願された米国特許出願第15/392,917号と、「FLEXIBLE INSTRUMENT INSERTION USING AN ADAPTIVE INSERTION FORCE THRESHOLD」と題され2016年12月28日に出願された米国特許出願第15/392,868号とに対する優先権を主張する。これらのおのおのは、すべての目的のために全体が参照により本明細書に組み入れられる。
さらに、内視鏡が目標位置に移動する間、内視鏡は、典型的には、内視鏡の弛みまたは挿入の固着および患者の生体構造と接触することによる偶発的な力に応答して座屈することがある。内視鏡が座屈すると、内科医および/または外科医はスコープを押し続け、内視鏡を前進させるために、挿入力を通常のレベルを超えて増大させる。これは内視鏡の座屈部分が、望ましくない潜在エネルギーを蓄積する危険性を生み出す。これは患者の内腔/腔内で制御不可能な手法で巻き戻る、または内視鏡を損傷させる可能性がある。
入力閾値は、少なくとも部分的にあらかじめ決定され、術前モデルの異なる部分にタグ付けされ得る。
本明細書に開示されている方法および装置は、「SYSTEM FOR ROBOTI
C-ASSISTED ENDOLUMENAL SURGERY AND RELATED METHODS」と題され、2014年10月24日に出願され、米国特許出願第2015/0119637号として公開された米国特許出願第14/523,760号に記載されているような1つまたは複数の内視鏡構成要素またはステップと共に使用するのに非常に適しており、その全開示は参照により本明細書に組み込まれる。前述の出願は、システム構成要素、管腔内システム、仮想レール構成、機構チェンジャインターフェース、器具デバイスマニピュレータ(IDM)、内視鏡ツール設計、制御コンソール、内視鏡、器具デバイスマニピュレータ、管腔内ナビゲーション、および本明細書に開示された実施形態にしたがう組合せのために適切な管腔内手順を記載している。上記出願に記載されている原理はカテーテル設計にも適用可能である。概して、この記載の以下のセクションは内視鏡の実施形態を記載するが、これは単なる一例であり、以下の記載は、カテーテル、またはより一般的には長尺体を有する任意の可撓性器具と連携して実装および/または使用され得る。
図1Aは、一実施形態による、手術用ロボットシステム100を例示する。手術用ロボットシステム100は、1つまたは複数のロボットアーム、たとえばロボットアーム102に結合されたベース101を含む。ベース101はコマンドコンソールに通信可能に結合されており、これは図2を参照してセクションI.B.コマンドコンソールにさらに記載されている。ベース101は、ロボットアーム102が患者に対して手術手順を実行するためのアクセスを有する一方で、内科医などのユーザが、コマンドコンソールの快適さから、手術用ロボットシステム100を制御できるように配置され得る。いくつかの実施形態において、ベース101は、患者を支持するために手術台またはベッドに結合され得る。明確にするために図1には図示されていないが、ベース101は、制御電子回路、空気圧、電源、光源などのサブシステムを含み得る。ロボットアーム102は、関節111で結合された多数のアームセグメント110を含み、それはロボットアーム102に多数の自由度、たとえば、7つのアームセグメントに対応する7つの自由度を提供する。ベース101は、電源112、空気圧113、および-中央処理装置、データバス、制御回路構成、メモリなどの構成要素-を含む制御およびセンサ電子回路114、およびロボットアーム102を移動させるためのモータなどの関連アクチュエータを含み得る。ベース101内の電子回路114はまた、コマンドコンソールから通信された制御信号を処理し送信し得る。
り外されて、異なる種類のIDMと交換され得、たとえば、第1の種類のIDMは内視鏡を操作し、第2の種類のIDMは腹腔鏡を操作する。MCI116は、空気圧、電力、電気信号、および光信号をロボットアーム102からIDM117に伝送するためのコネクタを含む。MCI116は、止めねじまたはベースプレートコネクタとすることができる。IDM117は、直接駆動、ハーモニック駆動、ギヤ駆動、ベルトおよびプーリ、磁気駆動などを含む技術を使用して内視鏡118などの手術用器具を操作する。MCI116は、IDM117の種類に基づいて相互交換可能であり、特定の種類の手術手順用にカスタマイズすることができる。ロボットアーム102は、KUKA AG(R)LBR5ロボットアームのような、関節レベルのトルク感知と、遠位端におけるリストを含むことができる。
具体的には、図1Bは、ロボットアーム102が内視鏡118を操作して内視鏡を患者の体の内部に挿入し、患者がロボットプラットフォーム150上に横たわっている手術用ロボットシステム100の側面図を図示する。図1Cは、手術用ロボットシステム100およびロボットプラットフォーム150の上面図を図示しており、ロボットアームによって操作される内視鏡118が患者の体の内部に挿入されている。図1Dは、手術用ロボットシステム100およびロボットプラットフォーム150の斜視図を図示し、内視鏡118は、ロボットプラットフォームと水平に平行に配置されるように制御される。図1Eは、手術用ロボットシステム100およびロボットプラットフォーム150の別の斜視図を図示し、内視鏡118は、ロボットプラットフォームに対して比較的垂直に位置決めされ
るように制御される。より詳細には、図1Eにおいて、ロボットプラットフォーム150の水平面と内視鏡118との間の角度は75度である。図1Fは、図1Eに図示される手術用ロボットシステム100およびロボットプラットフォーム150の斜視図を図示し、より詳細には、内視鏡118の端部180とロボットプラットフォームから比較的遠く離れて配置されているロボットアーム102とを接続している仮想線160と、内視鏡118との間の角度は90度である。
図2は、一実施形態による、手術用ロボットシステム100用のコマンドコンソール200を例示する。コマンドコンソール200は、コンソールベース201、ディスプレイモジュール202、たとえばモニタ、および制御モジュール、たとえばキーボード203およびジョイスティック204を含む。いくつかの実施形態では、コマンドモジュール200の機能のうちの1つまたは複数は、手術用ロボットシステム100のベース101、または手術用ロボットシステム100に通信可能に結合された別のシステムに統合され得る。ユーザ205、たとえば内科医は、コマンドコンソール200を使用して人間工学的位置から手術用ロボットシステム100を遠隔制御する。
102、内視鏡118、および他の手術用器具を移動させ得る。手術用ロボットシステム100は、ロボットアーム102および機器の適切な構成を決定するために、ユーザ205からの力のフィードバックおよび慣性制御に依存し得る。
図3Aは、一実施形態による内視鏡118の多数の運動度を示す。内視鏡118は、図1に図示される内視鏡118の実施形態である。図3Aに図示されるように、内視鏡118の先端部301は、長手方向軸306(ロール軸306とも称される)に対して撓みがゼロになるように向けられる。先端部301の異なる方位で画像を捕捉するために、手術用ロボットシステム100は、先端部301を、正のヨー軸302、負のヨー軸303、正のピッチ軸304、負のピッチ軸305、またはロール軸306上に撓ませる。内視鏡118の先端部301または本体310は、長手方向軸306、x軸308、またはy軸309において延長または並進され得る。
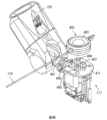
図4Aは、一実施形態による手術用ロボットシステム100の器具デバイスマニピュレータ117の等角図である。ロボットアーム102は、関節運動インターフェース401を介してIDM117に結合されている。IDM117は、内視鏡118に結合されている。関節運動インターフェース401は、ロボットアーム102およびIDM117との間で空気圧、電力信号、制御信号、およびフィードバック信号を伝送し得る。IDM117は、ギヤヘッド、モータ、ロータリエンコーダ、電力回路、および制御回路を含み得る
。IDM117から制御信号を受信するためのツールベース403が、内視鏡118の近位端に結合されている。制御信号に基づいて、IDM117は、出力シャフトを作動させることによって内視鏡118を操作する。これについては、図4Bを参照して以下にさらに記載される。
内視鏡が移動すると、その移動は、ある画像から次の画像への変化に反映される。これらの変化は、ある画像を別の画像に位置合わせする光学フロー技術を使用して検出され得、そこから移動が推定され得る。
ルまたは色)の変化に基づいて、内視鏡先端部の移動を判定する。画像センサが、内視鏡118に結合されているので、画像位置合わせモジュール130は、試料の一対の画像間の変化が、内視鏡先端部の移動、たとえば、ピッチまたはヨー軸における並進、回転、および/または拡大縮小に対応する画像センサの遠近におけるシフトによるものであると仮定する。
して推定することができ、ここで、ATは、Aの転置を表し、(ATA)-1は、ATとAの積の逆数を表す。解かれたpは、内視鏡の動き(たとえば、並進、回転)を表す。画像位置合わせモジュール130は、サンプルの多数の対の画像についてプロセス500のステップ520~540を繰り返すことができる。したがって、画像位置合わせモジュール130は、処理された各画像の対に対応する1組の動きベクトルを生成する。
図5Bは、一実施形態による、電磁追跡システムの図である。内視鏡118の先端部に結合された空間センサ550は、内視鏡118の近くにある1つまたは複数のEMF生成器600によって生成された電磁場(EMF)を検出するEMセンサ550である。検出されたEMFの強度は、内視鏡118の位置および/または方位の関数である。一実施形態では、多くのEMF生成器600が、患者の外部に位置する。EMF生成器600は、EMセンサ550によってピックアップされるEM場を放出する。異なるEMF生成器600は、それらの放出された場がEMセンサ550によって捕捉され、コントローラ120(または手術用ロボットシステム100の外部にある任意のコンピュータシステム)によって処理されるときに、それらの信号が分離可能であるように、多くの異なる手法で変調され得る。さらに、EMF生成器600は、EMセンサ550の方位の変化によって、EMセンサ550がいつでもEMF生成器600の少なくとも1つから少なくともいくつかの信号を受信するように、デカルト空間内でゼロではない、非直交角度で互いに対して向けられ得る。
図6A~図6Cは、内視鏡、たとえば、図3Aに図示された内視鏡118を用いた例示的な手術手順を例示する。図6Aは、一実施形態による生体構造的内腔602内の内視鏡118の遠位端を例示する。内視鏡118はシース311を含み、手術手順のために患者の内側の生体構造的内腔602を通って手術部位603に向かってナビゲートする。
視鏡118を例示する。手術部位603に到達した後、内視鏡118は、矢印605によって印される方向に、シース311と長手方向に整列した遠位リーダ部317を延ばす。内視鏡はまた、遠位リーダ部317を関節運動させて手術用器具を手術部位603に向けることができる。
上述したように、管腔内座屈は、生体構造的内腔内を手術部位または切開部位に向かってナビゲートされた可撓性器具(たとえば内視鏡)が、挿入力に応答して、生体構造的内腔内の望ましくない方向に脱出する現象である。
るとき、シース740はより「上方」の位置、または少なくともより「中立」の位置に向けられ、リーダ730上の挿入力ベクトルは、手術部位710の方向に、より揃えられ得る。後者の例では、リーダ730による逸脱または座屈の減少に加えて、シース740に加えられるより少ない量の挿入力で、より大きな挿入が達成され得る。
管腔内座屈は様々な様式で起こり得る。たとえば、内視鏡のリーダの先端部が動けなくなるか、または、ほとんど動けなくなり、内視鏡がさらに患者の内部に挿入されるにつれて、リーダまたはシースの一部が、大きな曲率で曲がることがある。座屈部分は、潜在的なエネルギーを蓄え、内視鏡を後方に押すことを試みる反力を生成する。
定するために、予想されるデータ(履歴データまたは基準データとも称される)と比較される。予想されるデータは、ナビゲーション中の内視鏡の動きによって生じる様々な特性に関連付けられたデータを記載する。予想されるデータの例は、内視鏡の動きによって生じる様々な予想状態に関連付けられたデータ、1つまたは複数の異なるセンサ領域から捕捉されたセンサデータ、同じセンサ領域から捕捉された異なる種類のセンサデータ、1つまたは複数の異なるセンサ領域から捕捉された異なる種類のセンサデータ、またはそれらの何らかの組合せを含む。より具体的には、予想されるデータは、内視鏡の動きによって生じる様々な可能性のある状態/複数の状態に関連付けられたデータを含む。予想される状態の例は、シースの先端部または遠位端の予想位置、リーダまたはシースの一部の予想位置、リーダまたはシースの予想される曲げ形状、リーダまたはシースの予想される曲げによって生成される予想される力、リーダまたはシースの先端部によって検出される予想される力、または、限定されないが、形状、距離、長さ、傾き、勾配、曲率、角度等、または、それらの何らかの組合せを含み得る内視鏡の状態に関連する他の任意の測定可能または導出可能な量を含む。
シースの端部が、コマンドに応答して閾値量未満しか移動していないことを示す場合、手術用ロボットシステム100は、セクションII.A.2.にさらに記載されているように、この状態変化のみに基づいて、または他の種類の状態変化と組み合わせて、管腔内座屈が生じたと判定し得る。第2の例は、コマンドに応答して、リーダの一部またはシースの一部が、予想位置に移動していない場合である。第3の例は、シースの一部(たとえば、シースの端部、遠位シース部)が、コマンドに応答して、後退された場合である。
図9A~図9Lは、一実施形態による、測定状態と予想状態との間の比較に基づく管腔内座屈検出の例を例示する。上述したように、管腔内座屈を検出するために、1つまたは複数の異なる種類のセンサを、同じセンサ領域に配置することができる。図9Aおよび図9Bに図示されるように、位置または力センサなどのセンサAが、第1のセンサ領域(たとえば、内視鏡の先端部)に配置されている。図9Aおよび図9Bは、センサA910によって示される測定位置A915Aおよび予想位置A915Bを図示する。たとえば、内視鏡を予想位置A915Bに移動させる挿入コマンドに応答して、内視鏡は測定位置A915Aに挿入される。図9Bに図示される予想位置Aと比較すると、図9Aに図示される測定位置Aは静止しているか、またはほんのわずかしか移動していないため、座屈が生じたことを示している。同様に、図9Aで測定された力(たとえば、先端部と肺構造との間で生成された摩擦力)は、コマンド入力に基づいて、図9Bで予想された力よりも大きくなり得、これによって座屈が生じたことを示す。
その派生物に基づく)が、予想位置から閾値を超えて(一致しない)、または、閾値未満(一致する)逸脱しているかを示す。測定と予想とが一致すれば、手術用ロボットシステムは、座屈は生じていないと判定し、一致しなければ、座屈が生じたと判定する。座屈を検出するために使用される導出パラメータの例は、傾き、距離、曲率、勾配、2つの位置から導出される別の適切なパラメータ、またはこれらの何らかの組合せを含む。
を透過する。手術用ロボットシステムは、FBGによって反射された光の波長に基づいて反射スペクトルデータを生成する。システムは、反射スペクトルデータを分析して、二次元または三次元空間における内視鏡の位置および方位データを生成することができる。特に、内視鏡が曲がると、内部に埋め込まれた形状感知光ファイバも曲がる。FBGによって反射された光の特定の波長は、形状感知光ファイバの形状に基づいて変化する(たとえば、「真っ直ぐな」内視鏡は、「湾曲した」内視鏡とは異なる形状にある)。したがって、システムは、反射スペクトルデータにおける相違を識別することによって、たとえば、(たとえば、手術用ロボットシステムからのコマンドに応答して)内視鏡が1つまたは複数の方向に何度曲がったかを判定することができる。
前のセクションでは、座屈は、予想された挙動と測定された挙動との間の相違に基づいて検出されるものとして記載された。このセクションでは、一般に内視鏡による動きコマンド(たとえば、挿入)の実行中、2つの時点間の内視鏡状態の変化に対してどのようにして座屈を検出することができるかについて記載している。
図12は、1つの例示的な実施形態による、センサデータによって示される状態変化に基づいて管腔内座屈を検出するためのプロセス1200のフローチャートである。プロセス1200は、いくつかの実施形態では、図12と連携して記載されたものとは異なるまたは追加のステップを含み得るか、または、図12と連携して記載された順序とは異なる順序でステップを実行し得る。
内視鏡の座屈は、患者の外部で生じ得る。たとえば、座屈は、リーダベースとシースベースとの間の近位リーダ部に沿って生じ得る。図13A~図13Fは、一実施形態による、患者の外部の内視鏡の座屈を検出する例である。図13Aに図示されるように、センサ1340は、リーダベース1310とシースベース1320との両方に配置される。2つのセンサが、送信機-受信機対を構成する。たとえば、送信機は、赤外光または可視光の光ビーム1345を送信し、送信機と同軸の、または送信機に隣接する受信機は、光ビーム1345を検出する。送信機1340は、図13Aに図示されるように受信機1343と反対側に配置され、またはその逆もある。
ムのように焦点に集められた光であるが、多数の送信機-受信機対は、本来分散され、放射された種類の光を受信するように構成された受信機と一致され得る。
コントローラ120は、内視鏡が座屈したことを示す、ユーザのためのフィードバックを生成し、そのフィードバックをユーザに提供する。たとえば、コントローラ120は、内視鏡が座屈したことを示すメッセージまたは警告を生成する。このメッセージまたは警告は、たとえば操作を制御するためにオペレータによって使用されている1つまたは複数のモニタなどのグラフィカルユーザインターフェース(GUT)上に表示するために提供され得る。コントローラ120はまた、ユーザへの推奨を生成することができる。これを行うために、コントローラ120は、内視鏡を移動させるためのコマンドに対する1つまたは複数の修正を決定する。修正は、少なくとも部分的にセンサデータに基づく。たとえば、コントローラ120は、内視鏡の座屈部分を滑らかにするためのコマンドを調整し得る。コマンドの例には、内視鏡を後退させること、先端部の移動を調整すること、IDM
によって提供される挿入力を調整すること、内視鏡の移動を調整する別の適切なコマンド、内視鏡の移動を停止させること、またはこれらの組合せを含む。
前述のように、手術用ロボットシステム100は、手術手順のために患者内の内視鏡118を制御するために、1つまたは複数のロボットアーム102を使用する。ロボットアームは、挿入力を加えて内視鏡を挿入し、内視鏡を手術部位まで前進させる。内視鏡が前進するにつれて、内視鏡をさらに前進させるのに必要とされる力は、手術部位の位置、そこに到達するために患者の腔内を通る経路、内視鏡のサイズなどを含む様々な要因に依存して経時的に変化する。それに対応して、少なくとも選択された経路に応じて、患者の内腔を損傷することなく安全に加えられ得る力の量は変化するであろう。たとえば、患者内の単一の肺網内では、損傷を回避するために設定され得る単一の力閾値制限は、すべての肺葉に適用可能ではない。一般に、上葉は、内視鏡がこれらの領域に入るために曲がるので、下葉よりも大きな挿入力を必要とする。そのようなものとして、動的な閾値を超えるレベルの力の適用を依然として回避しながら、手術を安全に実行することを可能にするために、その動的な力挿入閾値が必要とされる。
本明細書に記載されるように、手術用ロボットシステムは、患者への安全ではないさらなる挿入を回避するために、患者の内腔内の異なる位置に対する挿入力を調整するために適応型挿入力閾値を利用する。適応型挿入力閾値は、内視鏡データおよび患者データに基づいて決定される。
ダ1620との間の異なる距離、内視鏡の異なる動き(たとえば、リーダ1620Aは、リーダ1620Bよりも大きく曲がる)などを有する。内視鏡データが異なると、挿入力閾値も異なる。たとえば、第1の例は、曲げにより発生する力(たとえば、トルク、摩擦)を克服するために、より多くの挿入力を必要とする。さらに、異なる患者は、同じ手術部位において異なる挿入力閾値を有し得る。
図17は、一実施形態による、適応型挿入力閾値を用いて内視鏡を挿入するためのプロセス1700のフローチャートである。手術用ロボットシステムのコントローラ、たとえば図1に図示される手術用ロボットシステム100のコントローラ120は、適応型挿入力閾値を用いて内視鏡を挿入するためにプロセス1700を用いる。プロセス1700は、いくつかの実施形態では、図17と連携して記載したものとは異なるまたは追加のステップを含み得るか、または、図17と連携して記載した順序とは異なる順序で、ステップを実行することができる。
この開示を読めば、当業者は、本明細書に開示された原理を通して、さらなる追加の代替の構造的および機能的設計を理解するであろう。したがって、特定の実施形態および用途を例示および記載してきたが、開示された実施形態は、本明細書に開示された厳密な構造および構成要素に限定されないことを理解されたい。添付の特許請求の範囲に規定された精神および範囲から逸脱することなく、本明細書に開示された方法および装置の構成、動作および詳細において、当業者に明らかな様々な修正、変更、および変形がなされ得る。
し得る。別段に明記しない限り、実施形態はこの文脈に限定されない。
Claims (24)
- 長尺体からなる医療器具の座屈を検出するためのコントローラの動作方法であって、
前記コントローラが、前記長尺体の第1の部分に配置された、形状センサを有する第1のセンサから生成された第1のセンサデータを受信することであって、前記第1のセンサデータは、前記長尺体の前記第1の部分の測定形状を含む第1の測定状態に関する情報を含む、ことと、
前記コントローラが、前記長尺体に結合されたマニピュレータを制御して前記長尺体の移動をもたらすために使用可能なコマンドデータから、前記長尺体の前記第1の部分の第1の予想状態を決定することと、
前記コントローラが、前記第1の測定状態を、前記第1の予想状態と比較することと、
前記コントローラが、前記第1の測定状態が、関連付けられた第1の閾値に対して、前記第1の予想状態から逸脱したことに応答して、前記長尺体が座屈したと判定することと、
を含むコントローラの動作方法。 - 前記長尺体が、カテーテルおよび内視鏡のうちの少なくとも1つを有する、請求項1に記載のコントローラの動作方法。
- 前記長尺体が、リーダおよびシースを有し、前記リーダが、前記シース内に入れ子式に配置されている、請求項1に記載のコントローラの動作方法。
- 前記長尺体の前記第1の部分が、
前記リーダの先端部付近の体積を覆う第1の領域と、
前記シースの遠位端から前記第1の領域の縁部までの範囲内の前記リーダの一部を覆う第2の領域と、
前記リーダが延在する前記シースの前記遠位端、およびその遠位端に近位の前記シースの一部を覆う第3の領域と、
のうちの少なくとも1つを有する、請求項3に記載のコントローラの動作方法。 - 前記長尺体の前記第1の部分が、
前記シースの端部付近の体積を覆う第1の領域であって、前記シースの前記端部は、前記リーダが延在する、第1の領域と、
前記シースの第1の位置から前記第1の領域の縁部までの範囲内の前記シースの第1の部分を覆う第2の領域と、
前記シースの第2の位置から前記第2の領域の縁部までの範囲内の前記シースの第2の部分を覆う第3の領域であって、前記第2の位置は、前記第1の位置よりも、前記第1の領域から離れている、第3の領域と、
のうちの少なくとも1つを有する、請求項3に記載のコントローラの動作方法。 - 前記第1のセンサが、
前記長尺体内の内腔内のプルワイヤの一部に結合されている、請求項1に記載のコントローラの動作方法。 - 前記第1の予想状態が、前記長尺体の少なくとも一部が患者内に配置されている間に決定される、請求項1に記載のコントローラの動作方法。
- 前記形状センサが光ファイバ形状感知センサを有する、または、前記形状センサが複数の位置センサを有し、前記複数の位置センサが、形状を推定する関数によって適合することができる複数の離散位置を生成する、請求項1に記載のコントローラの動作方法。
- 前記マニピュレータは、ロボットマニピュレータを含み、前記コマンドデータは、前記ロボットマニピュレータから生成され、前記コマンドデータは、前記長尺体の前記第1の部分を予想位置に向けて移動させるように前記ロボットマニピュレータを制御するように構成された、請求項1に記載のコントローラの動作方法。
- 前記コントローラが、前記長尺体の第2の部分に配置された第2のセンサから生成された第2のセンサデータを受信することであって、前記第2のセンサデータは、前記長尺体の前記第2の部分の第2の測定状態に関する情報を含む、ことと、
前記コントローラが、前記第2の測定状態を、前記コマンドデータによって生じると予想される第2の予想状態と比較することと、
前記コントローラが、前記第1の測定状態が、関連付けられた第1の閾値に対して前記第1の予想状態から逸脱し、前記第2の測定状態が、関連付けられた第2の閾値に対して前記第2の予想状態から逸脱したことに応答して、前記長尺体が座屈したと判定することと
をさらに含む、請求項1に記載のコントローラの動作方法。 - 前記長尺体が座屈したことを示す、ユーザのためのフィードバックを生成することをさらに含み、
前記コントローラが、前記ユーザのためのフィードバックを生成することは、
前記コントローラが、前記長尺体を移動させるための推奨コマンドを生成することと、
前記コントローラが、前記長尺体が座屈したことを示すメッセージを生成することと、
前記コントローラが、前記長尺体が座屈したことを示す警告を生成することと、
のうちの少なくとも1つを含み、
前記コントローラが、前記ユーザのためのフィードバックを前記ユーザに提供することをさらに含む、請求項1に記載のコントローラの動作方法。 - 前記推奨コマンドは、
前記長尺体を後退させることと、
前記長尺体の先端部の移動を調整することと、
ロボットマニピュレータによって提供される挿入力を調整することと、
前記長尺体の移動を停止させることと、
のうちの少なくとも1つを含む、請求項11に記載のコントローラの動作方法。 - ロボットシステムであって、
長尺体を有する医療器具と、
前記長尺体の第1の部分に配置された、形状センサを有する第1のセンサと、
コントローラであって、
前記長尺体を移動させるためのコマンドを指示し、
前記第1のセンサから生成された第1のセンサデータを受信し、前記第1のセンサデータは、前記長尺体の前記第1の部分の測定形状を含む第1の測定状態に関する情報を含み、
前記長尺体に結合されたマニピュレータを制御して前記長尺体の移動をもたらすために使用可能なコマンドデータから、前記長尺体の前記第1の部分の第1の予想状態を決定し、
前記第1の測定状態を、前記第1の予想状態と比較し、
前記第1の測定状態が、関連付けられた第1の閾値に対して、前記第1の予想状態から逸脱したことに応答して、前記長尺体が座屈したと判定するように構成されたコントローラと、
を有する、ロボットシステム。 - 前記長尺体が、カテーテルおよび内視鏡のうちの少なくとも1つを有する、請求項13に記載のロボットシステム。
- 前記長尺体が、リーダおよびシースを有し、前記リーダが、前記シース内に入れ子式に配置されている、請求項13に記載のロボットシステム。
- 前記長尺体の前記第1の部分が、
前記リーダの先端部付近の体積を覆う第1の領域と、
前記患者の内部の前記長尺体のシースの遠位端から、前記第1の領域の縁部までの範囲内の前記リーダの一部を覆う第2の領域と、
前記リーダが延在する前記シースの前記遠位端、およびその遠位端に近位の前記シースの一部を覆う第3の領域と、
のうちの少なくとも1つを有する、請求項15に記載のロボットシステム。 - 前記長尺体の前記第1の部分が、
前記シースの端部付近の体積を覆う第1の領域と、
前記患者の内部の前記シースの第1の位置から前記第1の領域の縁部までの範囲内の前記シースの第1の部分を覆う第2の領域と、
前記シースの第2の位置から前記第2の領域の縁部までの範囲内の前記シースの第2の部分を覆う第3の領域であって、前記第2の位置は、前記第1の位置よりも、前記第1の領域から離れている、第3の領域と、
のうちの少なくとも1つを有する、請求項15に記載のロボットシステム。 - 前記第1のセンサが、
前記長尺体の内腔内のプルワイヤの一部に結合されている、請求項13に記載のロボットシステム。 - 前記第1の予想状態が、前記長尺体の少なくとも一部が患者内に配置されている間に決定される、請求項13に記載のロボットシステム。
- 前記形状センサが光ファイバ形状感知センサを有する、または、前記形状センサが複数の位置センサを有し、前記複数の位置センサが、形状を推定する関数によって適合することができる複数の離散位置を生成する、請求項18に記載のロボットシステム。
- 前記マニピュレータは、ロボットマニピュレータを含み、前記コマンドデータは、前記長尺体の一部を予想位置に向けて移動させるように前記ロボットマニピュレータを制御するように構成された、請求項13に記載のロボットシステム。
- 前記長尺体の第2の部分に配置された第2のセンサをさらに有し、
前記コントローラはさらに、
前記第2のセンサから生成された第2のセンサデータを受信し、前記第2のセンサデータは、前記長尺体の前記第2の部分の第2の測定状態に関する情報を含み、
前記第2の測定状態を、前記コマンドデータによって生じると予想される第2の予想状態と比較し、
前記第1の測定状態が、関連付けられた第1の閾値に対して前記第1の予想状態から逸脱し、前記第2の測定状態が、関連付けられた第2の閾値に対して前記第2の予想状態から逸脱したことに応答して、前記長尺体が座屈したと判定するように構成されている、請求項13に記載のロボットシステム。 - 前記コントローラはさらに、
前記長尺体が座屈したことを示す、ユーザのためのフィードバックを生成するように構成され、
前記ユーザのためのフィードバックを生成することは、
前記長尺体を移動させるための推奨コマンドを生成することと、
前記長尺体が座屈したことを示すメッセージを生成することと、
前記長尺体が座屈したことを示す警告を生成することと、
のうちの少なくとも1つを含み、
前記コントローラはさらに前記ユーザのためのフィードバックを前記ユーザに提供するように構成されている、請求項13に記載のロボットシステム。 - 前記推奨コマンドは、
前記長尺体を後退させることと、
前記長尺体の先端部の移動を調整することと、
ロボットマニピュレータによって提供される挿入力を調整することと、
前記長尺体の移動を停止させることと、
のうちの少なくとも1つを含む、請求項23に記載のロボットシステム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023061290A JP7427829B2 (ja) | 2016-12-28 | 2023-04-05 | 可撓性器具挿入のための装置 |
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/392,917 US10244926B2 (en) | 2016-12-28 | 2016-12-28 | Detecting endolumenal buckling of flexible instruments |
| US15/392,917 | 2016-12-28 | ||
| US15/392,868 US10543048B2 (en) | 2016-12-28 | 2016-12-28 | Flexible instrument insertion using an adaptive insertion force threshold |
| US15/392,868 | 2016-12-28 | ||
| PCT/US2017/068535 WO2018125917A1 (en) | 2016-12-28 | 2017-12-27 | Apparatus for flexible instrument insertion |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023061290A Division JP7427829B2 (ja) | 2016-12-28 | 2023-04-05 | 可撓性器具挿入のための装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2020513904A JP2020513904A (ja) | 2020-05-21 |
| JP2020513904A5 JP2020513904A5 (ja) | 2021-02-12 |
| JP7258755B2 true JP7258755B2 (ja) | 2023-04-17 |
Family
ID=61054492
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019534667A Active JP7258755B2 (ja) | 2016-12-28 | 2017-12-27 | 可撓性器具挿入のための装置 |
| JP2023061290A Active JP7427829B2 (ja) | 2016-12-28 | 2023-04-05 | 可撓性器具挿入のための装置 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023061290A Active JP7427829B2 (ja) | 2016-12-28 | 2023-04-05 | 可撓性器具挿入のための装置 |
Country Status (6)
| Country | Link |
|---|---|
| EP (1) | EP3562423A1 (ja) |
| JP (2) | JP7258755B2 (ja) |
| KR (2) | KR102619317B1 (ja) |
| CN (1) | CN108882966B (ja) |
| AU (1) | AU2017388217B2 (ja) |
| WO (1) | WO2018125917A1 (ja) |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10244926B2 (en) | 2016-12-28 | 2019-04-02 | Auris Health, Inc. | Detecting endolumenal buckling of flexible instruments |
| US11510736B2 (en) | 2017-12-14 | 2022-11-29 | Auris Health, Inc. | System and method for estimating instrument location |
| US10872449B2 (en) | 2018-05-02 | 2020-12-22 | Covidien Lp | System and method for constructing virtual radial ultrasound images from CT data and performing a surgical navigation procedure using virtual ultrasound images |
| WO2020055972A1 (en) * | 2018-09-11 | 2020-03-19 | Intuitive Surgical Operations, Inc. | Generation of graphical representation of force |
| US10383694B1 (en) | 2018-09-12 | 2019-08-20 | Johnson & Johnson Innovation—Jjdc, Inc. | Machine-learning-based visual-haptic feedback system for robotic surgical platforms |
| WO2020072415A1 (en) | 2018-10-04 | 2020-04-09 | Intuitive Surgical Operations, Inc. | Systems and methods for control of steerable devices |
| US11497566B2 (en) * | 2018-10-26 | 2022-11-15 | Biosense Webster (Israel) Ltd. | Loose mode for robot |
| US11161244B2 (en) * | 2019-01-22 | 2021-11-02 | Mitsubishi Electric Research Laboratories, Inc. | System and method for automatic error recovery in robotic assembly |
| CN113613542A (zh) * | 2019-01-24 | 2021-11-05 | 诺亚医疗集团公司 | 具有集成视觉能力的一次性装置 |
| US20220148739A1 (en) * | 2019-02-05 | 2022-05-12 | Smith & Nephew, Inc. | Use of robotic surgical data for long term episode of care |
| US20210045824A1 (en) * | 2019-08-15 | 2021-02-18 | Auris Health, Inc. | Axial motion drive devices, systems, and methods for a robotic medical system |
| CN110940301B (zh) * | 2019-11-28 | 2021-06-01 | 杭州电子科技大学 | 关节式坐标测量机的实时主动力矩补偿型平衡方法 |
| US12089903B2 (en) * | 2019-12-13 | 2024-09-17 | Intuitive Surgical Operations, Inc. | Systems and methods for inserting an elongate flexible instrument into an environment |
| CN111086004B (zh) * | 2020-01-08 | 2022-09-13 | 山东理工大学 | 一种仿人柔性关节手臂机电耦合建模方法 |
| CN111281544B (zh) * | 2020-02-26 | 2023-05-12 | 陕西中医药大学 | 体内医疗器械自动引导机器人系统及其自动引导方法 |
| CN111568558B (zh) * | 2020-04-13 | 2022-02-22 | 上海市胸科医院 | 电子设备、手术机器人系统及其控制方法 |
| DE102020205091A1 (de) * | 2020-04-22 | 2021-10-28 | Siemens Healthcare Gmbh | Verfahren zum Erzeugen eines Steuersignals |
| US11701492B2 (en) | 2020-06-04 | 2023-07-18 | Covidien Lp | Active distal tip drive |
| DE102020211999B4 (de) | 2020-09-24 | 2024-09-26 | Siemens Healthineers Ag | Vorrichtung zum Bewegen eines medizinischen Objekts und Verfahren zum Bereitstellen eines Signals |
| WO2022096624A1 (en) * | 2020-11-06 | 2022-05-12 | Universität Basel | Endodevice |
| CN113116475B (zh) * | 2020-12-31 | 2023-06-20 | 杭州堃博生物科技有限公司 | 经导管的导航处理方法、装置、介质、设备与导航系统 |
| CN116963690A (zh) * | 2021-02-17 | 2023-10-27 | 奥瑞斯健康公司 | 器械进送器装置的接合控制 |
| KR102662983B1 (ko) * | 2021-05-26 | 2024-05-07 | 서울대학교병원 | 기계학습을 이용하여 분석한 환자 영상 정보를 기반으로 한 환자 맞춤형 일측폐환기용 이중기관지 튜브 제조 시스템, 이에 따라 제조된 환자 맞춤형 일측폐환기용 이중기관지 튜브 및 이를 포함하는 키트 |
| CN113786238B (zh) * | 2021-11-17 | 2022-02-08 | 极限人工智能有限公司 | 一种手术器械操作应力感知方法及系统 |
| WO2023163037A1 (ja) * | 2022-02-28 | 2023-08-31 | キヤノン株式会社 | カテーテル装置を備えた医療システム |
| CN114886571B (zh) * | 2022-05-05 | 2022-12-16 | 北京唯迈医疗设备有限公司 | 一种介入手术机器人的控制方法和系统 |
| CN115444573A (zh) * | 2022-08-10 | 2022-12-09 | 上海优医基医学科技有限公司 | 柔性器械的控制方法、系统及手术机器人 |
| CN116871709B (zh) * | 2023-09-08 | 2023-12-08 | 常州市鹏瑞自动化设备有限公司 | 激光切割异形圆管件的方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014134530A (ja) | 2012-12-14 | 2014-07-24 | Panasonic Corp | 力計測装置、力計測方法、力計測プログラム、力計測用集積電子回路、並びに、マスタースレーブ装置 |
| JP2015505507A (ja) | 2012-02-03 | 2015-02-23 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 埋め込み型形状感知機能を有する操縦可能な可撓性針 |
| US20150297864A1 (en) | 2014-04-21 | 2015-10-22 | Hansen Medical, Inc. | Devices, systems, and methods for controlling active drive systems |
| WO2018057633A1 (en) | 2016-09-21 | 2018-03-29 | Intuitive Surgical Operations, Inc. | Systems and methods for instrument buckling detection |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1491139B1 (en) * | 1997-01-03 | 2007-08-29 | Biosense Webster, Inc. | Bend-responsive catheter |
| US6780197B2 (en) * | 2000-01-05 | 2004-08-24 | Integrated Vascular Systems, Inc. | Apparatus and methods for delivering a vascular closure device to a body lumen |
| US8226580B2 (en) * | 2010-06-30 | 2012-07-24 | Biosense Webster (Israel), Ltd. | Pressure sensing for a multi-arm catheter |
| EP2532299B1 (en) * | 2010-09-14 | 2014-11-05 | Olympus Medical Systems Corp. | Endoscope system and low visibility determining method |
| US8900131B2 (en) * | 2011-05-13 | 2014-12-02 | Intuitive Surgical Operations, Inc. | Medical system providing dynamic registration of a model of an anatomical structure for image-guided surgery |
| CN108784702B (zh) * | 2013-03-15 | 2021-11-12 | 直观外科手术操作公司 | 用于跟踪介入器械的形状传感器系统以及使用方法 |
| JP6037964B2 (ja) * | 2013-07-26 | 2016-12-07 | オリンパス株式会社 | マニピュレータシステム |
| EP3060157B1 (en) | 2013-10-24 | 2019-12-11 | Auris Health, Inc. | System for robotic-assisted endolumenal surgery |
-
2017
- 2017-12-27 JP JP2019534667A patent/JP7258755B2/ja active Active
- 2017-12-27 KR KR1020237017365A patent/KR102619317B1/ko active IP Right Grant
- 2017-12-27 AU AU2017388217A patent/AU2017388217B2/en active Active
- 2017-12-27 CN CN201780021723.1A patent/CN108882966B/zh active Active
- 2017-12-27 EP EP17835908.9A patent/EP3562423A1/en active Pending
- 2017-12-27 KR KR1020187028120A patent/KR102536940B1/ko active IP Right Grant
- 2017-12-27 WO PCT/US2017/068535 patent/WO2018125917A1/en unknown
-
2023
- 2023-04-05 JP JP2023061290A patent/JP7427829B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015505507A (ja) | 2012-02-03 | 2015-02-23 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 埋め込み型形状感知機能を有する操縦可能な可撓性針 |
| JP2014134530A (ja) | 2012-12-14 | 2014-07-24 | Panasonic Corp | 力計測装置、力計測方法、力計測プログラム、力計測用集積電子回路、並びに、マスタースレーブ装置 |
| US20150297864A1 (en) | 2014-04-21 | 2015-10-22 | Hansen Medical, Inc. | Devices, systems, and methods for controlling active drive systems |
| WO2018057633A1 (en) | 2016-09-21 | 2018-03-29 | Intuitive Surgical Operations, Inc. | Systems and methods for instrument buckling detection |
Also Published As
| Publication number | Publication date |
|---|---|
| AU2017388217B2 (en) | 2022-10-27 |
| AU2017388217A1 (en) | 2019-05-02 |
| KR102619317B1 (ko) | 2024-01-03 |
| WO2018125917A1 (en) | 2018-07-05 |
| CN108882966B (zh) | 2022-04-12 |
| KR20190101860A (ko) | 2019-09-02 |
| KR20230082051A (ko) | 2023-06-08 |
| JP7427829B2 (ja) | 2024-02-05 |
| CN108882966A (zh) | 2018-11-23 |
| JP2023103211A (ja) | 2023-07-26 |
| EP3562423A1 (en) | 2019-11-06 |
| KR102536940B1 (ko) | 2023-05-30 |
| JP2020513904A (ja) | 2020-05-21 |
| WO2018125917A8 (en) | 2018-10-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7258755B2 (ja) | 可撓性器具挿入のための装置 | |
| US11771309B2 (en) | Detecting endolumenal buckling of flexible instruments | |
| US20200268459A1 (en) | Flexible instrument insertion using an adaptive insertion force threshold | |
| US11911011B2 (en) | Endolumenal object sizing | |
| US11403759B2 (en) | Navigation of tubular networks | |
| US11779400B2 (en) | Combining strain-based shape sensing with catheter control | |
| US11850008B2 (en) | Image-based branch detection and mapping for navigation | |
| US20210153956A1 (en) | Patient introducer alignment | |
| JP7019683B2 (ja) | プルワイヤを用いた内視鏡の自動較正 | |
| US12087007B2 (en) | Vision-based 6DOF camera pose estimation in bronchoscopy |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201224 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201224 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20210428 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20210428 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20210511 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20211015 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211019 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20220119 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20220318 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220415 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220913 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20221213 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230119 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230207 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20230309 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230405 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7258755 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |