以下、本発明の実施の形態について、図面を参照しながら説明する。なお、この実施の形態によって本発明が限定されるものではない。
(実施の形態1)
以下に、本実施の形態における自律走行型掃除機10(単に、「掃除機10」と記す場合がある)の構成について、図1から図16を参照して、説明する。
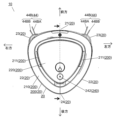
図1は、本発明の実施の形態における自律走行型掃除機の全体斜視図である。図2は、同自律走行型掃除機の平面図である。図3は、同自律走行型掃除機の底面図である。図4は、同自律走行型掃除機の正面図である。図5は、同自律走行型掃除機の左側面図である。図6は、同自律走行型掃除機の蓋が開いた状態の平面図である。図7は、同自律走行型掃除機のごみ箱ユニットを取り出した状態の斜視図である。図8は、同自律走行型掃除機のロアーユニットの斜視図である。図9は、同自律走行型掃除機のアッパーユニットの斜視図である。図10は、同自律走行型掃除機の左断面図である。図11は、同自律走行型掃除機のごみ箱ユニットを取り出した状態の左断面図である。図12は、同自律走行型掃除機の底面からみたサイドブラシの回転領域を示す部分図である。図13は、図12のA-A断面を示し、サイドブラシの要部断面図である。図14は、図12のB-B断面を示
し、清掃起毛布の部分断面図である。図15は、同自律走行型掃除機の底面からみたサイドブラシの回転時の状態であり、清掃起毛布が床面から0.5mm以下の状態を指す。図16は、同自律走行型掃除機の底面からみたサイドブラシの回転時の状態であり、清掃起毛布が床面から0.5mm以上離れた時の状態を指す。
本実施の形態の自律走行型掃除機10は、対象領域の清掃面上を自律的に走行し、清掃面上に存在するごみなどの塵埃を吸引するロボット型の掃除機が例示される。掃除機10は、複数の構造的な機能ブロックを含む。なお、対象領域は、例えば部屋などである。また、清掃面は、例えば部屋の床面などである。
図1から図13に示すように、本実施の形態の掃除機10は、以下の各種構成要素を搭載するボディ20、清掃ユニット40、吸引ユニット50、ごみ箱ユニット60、一対の駆動ユニット30、制御ユニット70、電源ユニット80などを含む。駆動ユニット30の一部、清掃ユニット40の一部、ごみ箱ユニット60、吸引ユニット50、制御ユニット70および電源ユニット80は、ボディ20内に配置される。
なお、以降では、図中に示すように、ボディ20の前面21側を前方向、後方頂部24側を後方向として、説明する。また、ボディ20の被清掃面側を下方、反対側を上方とし、さらに、ボディ20の前面21に向かって右側を右方、左側を左方として、説明する。
具体的には、清掃ユニット40は、部屋などの対象領域に存在するごみを集める。吸引ユニット50は、集められたごみを、ボディ20の内部に吸引する。ごみ箱ユニット60は、吸引ユニット50により吸引されたごみを溜める。
駆動ユニット30は、図3に示すように、例えば一対で構成され、ボディ20の底面側に設けられる。駆動ユニット30は、後述する、駆動ユニット30の回転に追従して回転するキャスター90と協働して、ボディ20を所定の方向に移動させる。制御ユニット70は、駆動ユニット30、清掃ユニット40、吸引ユニット50などの動作を制御する。電源ユニット80は、駆動ユニット30、清掃ユニット40、吸引ユニット50、制御ユニット70などに、電力を供給する。
ボディ20は、ロアーユニット100(図8参照)、および、アッパーユニット200(図9参照)を含む。ロアーユニット100は、ボディ20の下側の外形を形成する。アッパーユニット200は、ボディ20の上側の外形を形成する。ロアーユニット100とアッパーユニット200とを組み合わせることにより、ボディ20の外郭が構成される。
アッパーユニット200は、カバー210、蓋220(図1、図7参照)、バンパー230などを含む。カバー210は、アッパーユニット200の主要な部分を形成する。蓋220は、カバー210に開閉自在に配設される。バンパー230は、カバー210の前面21側に設けられる。バンパー230はアッパーユニット200の外郭を構成し、ロアーユニット100に対して変位可能に構成され、障害物などとの衝突による衝撃を、吸収または緩和する。
また、駆動ユニット30は、図3に示すように、ロアーユニット100の底面側に配置され、複数の要素を含む。複数の要素は、一対の、例えばタイヤ34、ホイール33(図10参照)、走行用モーター31、ハウジング32、支持軸35などが含まれる。タイヤ34は、清掃面上を走行し、ボディ20を移動させる。ホイール33は、タイヤ34を保持する。走行用モーター31は、ホイール33に回転トルクを与える。ハウジング32は、走行用モーター31を収容する。ハウジング32は、ロアーユニット100に形成される凹部(図示せず)に収容される。ハウジング32は、ロアーユニット100により、タ
イヤ34を回転可能に支持する。
ホイール33は、メインブラシ43の幅方向(長手方向)において、走行用モーター31よりも外側に配置される。この配置により、ホイール33が走行用モーター31よりも内側に配置される場合と比較して、右側のホイール33と左側のホイール33との間隔が広くなる。そのため、走行時などにおける、ボディ20の安定性が向上する。
本実施の形態の掃除機10は、対向2輪型の駆動方式で動作される。つまり、掃除機10は、ボディ20の幅方向(左右方向)において、右側の駆動ユニット30と左側の駆動ユニット30とが対向して配置される。図3に示す、右側のホイール33の回転軸Hおよび左側のホイール33の回転軸Hは、駆動ユニット30を回動させる支持軸35に対して平行で同一方向に設けられる。さらに、左右のホイール33の回転軸Hは、支持軸35を介して、サスペンション36(図8参照)に固定される。サスペンション36は、駆動時において、被清掃面などの凹凸によるボディ20に加わる振動を緩和するクッションの役割を果たす。
また、ロアーユニット100は、後部下面側で、ボディ20の後方頂部24近傍に、上述したキャスター90を備える。キャスター90は、支持軸91を介し、さらに支柱軸92を介して、ロアーユニット100に回転自在に軸支される。つまり、ボディ20は、左右の駆動ユニット30とキャスター90の3点で、被清掃面に対して、支持される。そのため、ボディ20を、常に安定して移動させることができる。
清掃ユニット40は、図3および図8に示すように、ロアーユニット100に配置され、複数の要素を含む。複数の要素は、例えばブラシ駆動モーター41、ギアボックス42、メインブラシ43、サイドブラシ44などが含まれる。ブラシ駆動モーター41およびギアボックス42は、ボディ20の内部に配置される。メインブラシ43は、ボディ20の吸込口101に配設される。サイドブラシ44は、図2に示すように、ボディ20の前面21と左右の側面22との交点にある左右の前方頂部23に配置される。サイドブラシ44は、ブラシ軸44Aと、ブラシ軸44Aに固定され、ボディ20から下方に向かって突出するように配設されるブリッスル束44Bを含む。ブラシ軸44Aは、ギアボックス42(図8参照)に固定される。
サイドブラシ44は、図12に示すように、長さの異なる第1ブリッスル束44BAおよび第2ブリッスル束44BBからなるブリッスル束44Bが、例えば2対4本で構成される。このとき、回転方向に対して、第1ブリッスル束44BAが、第2ブリッスル束44BBより先に進んだ位置に配置される。そして、第1ブリッスル束44BAの長さは、第2ブリッスル束44BBの長さより、長くなるように形成される。このとき、第2ブリッスル束44BBの長さは、先端部が、回転時において、少なくとも、後述する清掃起毛布121(図3参照)と接触する程度の長さで構成される。具体的には、第1ブリッスル束44BAの長さは52mm程度で、第2ブリッスル束44BBの長さは44mm程度である。
また、一方の1対のブリッスル束44Bと、他方の1対のブリッスル束44Bとは、互いに、ブラシ軸44Aの回転軸に対して、180度の2回回転対称の位置に設けられる。
さらに、1対のブリッスル束44Bを構成する第1ブリッスル束44BAおよび第2ブリッスル束44BBは、ブラシ軸44Aに対して、異なる角度で植毛される。具体的には、図12に示すように、第1ブリッスル束44BAおよび第2ブリッスル束44BBは、回転方向において、ブラシ軸44Aに対して、略V字形状(V字形状を含む)の異なる回転角度で植毛される。例えば、第2ブリッスル束44BBを基準に、第1ブリッスル束4
4BAは、ブラシ軸44Aに対して、回転方向に、8°から10°の進んだ回転角度で植毛される。
また、第2ブリッスル束44BBは、上下方向において、第1ブリッスル束44BAよりも、より下方側に傾斜する、例えば水平方向から12°の異なる傾斜角度で植毛される。具体的には、第1ブリッスル束44BAは、ブラシ軸44Aにおける水平方向から31°の傾斜角度で植毛され、第2ブリッスル束44BBは、43°の傾斜角度で植毛される。
つまり、本実施の形態では、1対のブリッスル束44Bを構成する第1ブリッスル束44BAおよび第2ブリッスル束44BBの、それぞれの長さと角度は、回転時の捕集面積が広くなるように、適切に決定される。
サイドブラシ44は、上述したように、掃除機10の左右前方に突出した前方頂部23に配置される(図1参照)。この配置により、部屋の隅の塵埃を、より高い捕集性能で集塵できる。
また、ブラシ駆動モーター41およびギアボックス42は、図8に示すように、ロアーユニット100に取り付けられる。ブラシ駆動モーター41の出力軸(図示せず)は、ギアボックス42、メインブラシ43(図3参照)および左右前方のサイドブラシ44に接続される。これにより、ブラシ駆動モーター41の回転出力が、メインブラシ43およびサイドブラシ44に伝達される。
メインブラシ43の長手方向の長さは、ロアーユニット100に形成される吸込口101の長手方向の長さと、ほぼ同じ長さを有する。メインブラシ43は、ロアーユニット100に対して、軸受部(図示せず)により、回転可能に支持される。軸受部は、例えばギアボックス42およびロアーユニット100の一方または両方に配設される。このとき、メインブラシ43は、例えばごみをボディ20の前方側に送り出す方向に回転する。
また、メインブラシ43は、図11および図12に示すように、ブラシカバー120により保護される。ブラシカバー120は、被清掃面側に配置される清掃起毛布121を備える。清掃起毛布121は、図14に示すように、床面から僅かに離した位置に有する事で床面との間に後述する僅かな隙間Eを設けている。
図16に示すように回転するサイドブラシ44が清掃起毛布面を通過する際は、床面との間に設けた僅かな隙間をサイドブラシが拡がりながら通る事で、清掃起毛布面を介してサイドブラシ44に付着する塵埃を掃き落として、清掃することを狙いとしている。
そのため、サイドブラシ44は、常に、ブリッスル束44Bの床面接地領域部分において、塵埃付着のない状態が維持される。つまり、本体が前後方向に起動している状態で塵埃などを捕集する際、比較的質量のある塵埃は、サイドブラシ44の回転時に、サイドブラシ44を介して吸込口101に集められ、吸引される。しかし、例えば皮脂成分や繊維質状で質量が小さい細塵は、サイドブラシ44に付着したままの状態になり易い。そのため、細塵は、吸込口101で確実に吸引除去されず、サイドブラシ44の遠心分離により、再び、外に掃き出される場合がある。そこで、本実施の形態では、サイドブラシ44の回転領域内に清掃起毛布を設け、清掃起毛布121により、サイドブラシ44の床面接地領域部分に付着した塵埃を掃き落として、吸引除去できるように構成している。
なお、図14でも示すように、清掃起毛布121は、床面から僅かな隙間を設ける事が有効であり、隙間Eが少なくとも0.5mm以上、2.0mm以下となる様に設定される
のが望ましく、その範囲の中でもより効果的寸法として、清掃起毛布121は、床面からの距離を例えば1.0mmに設定している。
一方、図15に示されるように、清掃起毛布と床面との隙間が0.5mmを下回る設定のした場合、サイドブラシ44の第1ブリッスル束44BAが清掃起毛布121と床面との隙間を通過出来ずに、清掃起毛布121と当接し、第1のブリッスル束44BAと第2のブリッスル束44BBが共にサイドブラシの回転動作に応じてブリッスル束が曲げられた形状となる。
この様な、図15に示すような状態では、第1のブリッスル束44BAは清掃起毛布121を介し付着している塵埃が掃き落とされるが、第2のブリッスル束44BBは第1のブリッスル束44BAの後続に位置し、清掃起毛布121に接触されない為、付着している塵埃が掃き落とされていないまま、サイドブラシ44の遠心分離により、再び、外に掃き出される。
さらに、本実施の形態の掃除機10は、図13に示すように、清掃面が水平な平面に掃除機10を設置した状態において、サイドブラシ44のブラシ軸44Aと床面との距離Dが、10mm以上、18mm以下となるように設定している。
なお、距離Dが18mmを超える場合、サイドブラシ44の第1ブリッスル束44BAおよび第2ブリッスル束44BBは、上下方向において、ブラシ軸44Aにおける水平方向から約60°を超える傾斜角度で植毛される。これにより、清掃面に対して、第1ブリッスル束44BAおよび第2ブリッスル束44BBが湾曲して接触する面積が減少する。そのため、サイドブラシ44による清掃面積が減少し、清掃効率が低下する虞がある。
具体的には、本実施の形態の掃除機10は、タイヤ34が最も沈んでいる状態で、床面からの距離Dを、例えば12mmに設定している。通常、掃除機10は、段差乗越え性に対応するため、サスペンション36によりボディ20が持ち上がるように構成される。そのため、タイヤ34がボディ20から完全に飛び出した状態においては、ボディ20から40mm程度飛び出す。
しかし、実際においては、床面から大きく離れると段差センサーが働く。また、ボディ20の自重により、サスペンション36では、40mmまで持ち上がらない。さらに、床面から大きく離れると、サイドブラシ44が床面から離れ、清掃面積が減少する。そのため、上記の点を考慮すると、距離Dとしては、20~25mm程度以下、好ましく、18mm以下がより好ましい。
一方、床面に近い、距離Dが10mm未満に設定にすると、ボディ20が、基材の柔らかいカーペットや毛足が長いカーペット上に差し掛かった際に、サイドブラシ44とカーペットとが絡み付き易くなる。また、段差乗越え時に、ブラシ軸44Aが、先に、カーペットの段差と接触し、カーペットを乗越えられなくなる。
そこで、回転体となるサイドブラシ44のブラシ軸44Aが、床面から、10mm以上18mm以下程度、離れて配置される。これにより、ブラシ軸44Aと、カーペットなどとの、絡み付きが抑制される。さらに、ブラシ軸44Aと、例えばカーペットの厚みに相当する段差などとの、衝突を回避できる。
吸引ユニット50は、図8、図10や図11に示すように、ロアーユニット100に配置され、複数の要素を含む。具体的には、吸引ユニット50は、例えばごみ箱ユニット60の後方側、かつ電源ユニット80の前方側に配置される。複数の要素は、例えばファン
ケース52、ファンケース52の内部に配置される電動ファン51などが含まれる。
ファンケース52は、前方に配置される、ごみ箱ユニット60の出口61Bと接する吸気口52Aを備える。電動ファン51は、吸気口52Aを介して、ごみ箱ユニット60の出口61Bから内部の空気を吸引する。吸引された空気は、電動ファン51の後方の外方に排出される。具体的には、電動ファン51から排出された空気は、ファンケース52の内部の空間、およびボディ20の内部の空間を通過する。そして、アッパーユニット200に形成された排気口211(図7参照)を介して、ボディ20内から外部に排出される。
ごみ箱ユニット60は、図10および図11に示すように、メインブラシ43の後方側、かつ吸引ユニット50の前方側で、さらに1対の駆動ユニット30(図3参照)の間の、ボディ20の内部に配置される。ごみ箱ユニット60は、蓋220の開放により、ボディ20に対して、着脱自在に取り付けられる。つまり、ごみ箱ユニット60は、ボディ20に取り付けられた状態、および、ボディ20から取り外された状態が可能な着脱構造を備える。
また、ごみ箱ユニット60は、ごみ箱収納部250に収納され、複数の要素を含む(図11参照)。複数の要素は、例えば塵埃を集塵する、入口61A、出口61Bおよび底部61Cを備えるごみ箱61、細塵を捕集するフィルター62などが含まれる。
ごみ箱ユニット60は、以下のように機能する。
まず、吸引ユニット50により、床面の塵埃が、清掃ユニット40の吸込口101(図3参照)を介して、空気とともに吸引される。吸引された塵埃を含む空気は、ロアーユニット100に備えられたダクト110(図8参照)を介して、入口61Aからごみ箱61内に入る。ごみ箱61に入った大きな塵埃は、底部61Cに溜まる。一方、ごみ箱61の内部に入った細塵(小さな塵埃など)を含む空気は、ごみ箱61の出口61Bと接する、吸引ユニット50のフィルター62により、小さな塵埃が濾過される。そして、塵埃が濾過された空気は、吸引ユニット50を介して、ボディ20の排気口211(図7参照)から外部に排出される。これにより、ごみ箱ユニット60に、廃棄可能な状態で塵埃が捕集される。
制御ユニット70は、図8および図10に示すように、ボディ20の内部において、吸引ユニット50の後方側に配置される。
また、本実施の形態の掃除機10は、図1から図8に示すように、複数のセンサーを備える。複数のセンサーは、例えば障害物検出センサー71、側面距離測定センサー72、衝突検出センサー73、床面検出センサー74、脱輪検出スイッチ75などを含む。
障害物検出センサー71(図1参照)は、ボディ20の前方の中央に設けられ、前方に存在する障害物を検出する。障害物検出センサー71は、レーザー発光部71Aおよびレーザー受光部71Bを備える。具体的には、障害物検出センサー71は、レーザー発光部71Aからレーザー光を前方に照射する。そして、障害物などからの反射光をレーザー受光部71Bで受光し、読み取る。 更に超音波送波部71Cおよび超音波受波部71Dを備える。具体的には、障害物検出センサー71は、超音波送波部71Cから超音波を前方に発信する。そして、障害物などからの反射を超音波受波部71Dで受信し、読み取る。これにより、障害物検出センサー71は、ボディ20の正面に存在する障害物を検知する。
側面距離測定センサー72(図4参照)は、ボディ20の側面の前方側の左右に、例えば2つ設けられ、側面側に存在する障害物とボディ20との距離を検出し、壁際の掃除を実現する。衝突検出センサー73(図9参照)は、ボディ20のアッパーユニット200の前方に設けられ、ボディ20と周囲の物体との衝突を検出する。床面検出センサー74(図3参照)は、ボディ20のロアーユニット100の各所に複数設けられ、ボディ20の底面側に被清掃面が存在するか否かを、検出する。脱輪検出スイッチ75(図8参照)は、左右の駆動ユニット30の後方にそれぞれ配置され、タイヤ34などの脱輪を検知する。
上記障害物検出センサー71、側面距離測定センサー72、衝突検出センサー73、床面検出センサー74および脱輪検出スイッチ75は、それぞれ制御ユニット70に検出信号を出力する。制御ユニット70は、入力された検出信号に基づいて、各ユニットを制御する。
さらに、本実施の形態の掃除機10は、図6に示すように、インターフェース部240を備える。インターフェース部240は、例えばパネル241、操作ボタン242、表示部243などを含む。使用者は、インターフェース部240を介して、掃除機10の各操作状況や運転状態などを確認できる。
具体的には、インターフェース部240の表示部243は、上記障害物検出センサー71、側面距離測定センサー72、衝突検出センサー73、床面検出センサー74および脱輪検出スイッチ75で検出された、掃除機10のエラー状態などを表示する。これにより、使用者は、表示部243を介して、掃除機10のエラーの状況を確認できる。
また、使用者は、インターフェース部240の操作ボタン242およびパネル241の各ボタンを介して、ボディ20の各操作を指示することができる。
また、本実施の形態の掃除機10は、図10に示すように、複数の要素を含む電源ユニット80を、さらに備える。電源ユニット80は、上記駆動ユニット30、清掃ユニット40、吸引ユニット50、制御ユニット70に電力を供給する。具体的には、電源ユニット80は、ボディ20の前後方向の中心よりも後方側で、吸引ユニット50よりも後方側に配置される。複数の要素は、例えば電池ケース81、蓄電池82などが含まれる。電池ケース81は、ロアーユニット100に取り付けられる。蓄電池82は、電池ケース81内に収容される。蓄電池82は、例えばリチウム電池などの2次電池で例示される。
上記のように、本実施の形態の自律走行型掃除機10は、床面の塵埃を捕集する自律走行型の掃除機である。具体的には、掃除機10は、吸引風を発生させる吸引ユニット50と、塵埃を捕集するごみ箱ユニット60を内蔵する。掃除機10は、底面側に、塵埃を捕集するメインブラシ43を搭載する吸込口101と、床面上の塵埃を吸込口101に集めるために吸込口101の前方の左右に配置されるサイドブラシ44を搭載する。そして、掃除機10は、吸引ユニット50で、塵埃を吸い込む空気の流れを発生させる。これにより、吸込口101から、床面上の塵埃を吸い込み、吸い込んだ塵埃をごみ箱ユニット60に捕集するように構成される。
また、掃除機10は、駆動ユニット30と、電源ユニット80と、制御ユニット70などを、さらに備える。駆動ユニット30は、掃除機10の底面側の左右に設けられ、床面上で前後方向の移動、および左右方向に旋回させるタイヤ34を備える。電源ユニット80は、吸引ユニット50と駆動ユニット30に搭載される走行用モーター31などに、電力を供給する。
制御ユニット70は、障害物などを検知する、障害物検出センサー71、側面距離測定センサー72、衝突検出センサー73、床面検出センサー74などを有し、それらの検出信号に基づいて、吸引ユニット50や駆動ユニット30などを制御するように構成される。これにより、掃除機10は、制御ユニット70の制御に基づいて、駆動ユニット30のタイヤ34を駆動し、被清掃面上を走行しながら、清掃可能に構成される。
本実施の形態の掃除機10は、掃除機10の底面側に配置される、少なくとも1対のサイドブラシ44を備える。具体的には、サイドブラシ44は、掃除機10の左側と右側の前方頂部23に設けられる。右側のサイドブラシ44の回転軌道および左側のサイドブラシ44の回転軌道は、それぞれ、掃除機10の外周りで、前面21から吸込口101に向かう方向に回転する。
つまり、左右のそれぞれのサイドブラシ44は、互いに反対方向に回転する。これにより、掃除機10が前進しているときに、サイドブラシ44により塵埃が吸込口101に向かって、掻き集められる。その結果、床面の塵埃が、掃除機10に捕集され、部屋が清掃される。
また、それぞれのサイドブラシ44は、例えば2対4本のブリッスル束44Bと、ブラシ軸44Aを含む。1対2本のブリッスル束44Bは、長さの異なる長短2種類の、第1ブリッスル束44BAおよび第2ブリッスル束44BBを束ねて構成される。長い第1ブリッスル束44BAは、回転半径が大きく、より遠くの塵埃を拾うことができる。一方、短い第2ブリッスル束44BBは、回転半径が小さく、近くの塵埃を、より確実に拾うことができる。さらに、第1ブリッスル束44BAおよび第2ブリッスル束44BBのそれぞれは、回転方向および上下方向において、ブラシ軸44Aに対して、異なる回転角度または傾斜角度で植毛される。これにより、床面上の塵埃の捕集面積を広くカバーすることができる。
さらに、ブラシカバー120は、サイドブラシ44のブリッスル束44Bの回転領域内に、清掃起毛布121を備え、清掃起毛布121と床面との間に僅かな隙間を設けている。そのため、ブリッスル束44Bは、清掃起毛布121と床面との間の隙間を通り、清掃起毛布121に接触しながら通過する。これにより、サイドブラシ44の回転時にブリッスル束44Bに付着した塵埃は、清掃起毛布121との接触により、拭き落とされる。例えば、本実施の形態の掃除機は、より効果的な隙間寸法として、清掃起毛布121と床面との隙間を1.0mmに設定している。そして、拭き落とされた塵埃は、吸込口101からごみ箱ユニット60内に吸い込まれる。その結果、ブリッスル束44Bに付着した細塵などの塵埃が、サイドブラシ44の遠心力により、再び、掃除機10の外に掃き出されることを防止される。
さらに、本実施の形態の掃除機は、サイドブラシ44のブラシ軸44Aを床面から10mm以上、18mm以下の位置に配置する。これにより、従来の5mm程度で配置されるブラシ軸を有する自律走行型掃除機よりも、ブリッスル束44Bへの、カーペットなどの絡み付きを抑制できる。さらに、段差などの乗り越え時において、段差などとの衝突頻度を低減できる。これにより、高い信頼性と、清掃性に優れる掃除機を実現できる。
なお、本実施の形態の掃除機10の一形態としては、掃除機10を走行させる複数の駆動ユニット30を備え、複数の駆動ユニット30は、第1の駆動ユニット30および第2の駆動ユニット30を含む。さらに、第1の駆動ユニット30および第2の駆動ユニット30は同軸上に存在する回転軸(図示せず)を有する構成としてもよい。これにより、それぞれの駆動ユニット30を独立して駆動することができる。
また、本実施の形態の掃除機10の一形態としては、複数の駆動ユニット30を制御する制御ユニット70を備え、制御ユニット70は、ボディ20により四角形の軌道の少なくとも一部が形成されるように第1の駆動ユニット30および第2の駆動ユニット30を制御してもよい。
上記構成によれば、それぞれの駆動ユニット30を個別に動作させることにより、掃除機10の前方部を、清掃する対象領域の隅の頂点、またはその付近に移動させることができる。つまり、掃除機10の吸込口101を、対象領域の隅の頂点に、より一層、接近させることができる。その結果、対象領域の隅に存在するごみを、より多く、確実に吸引して、清掃できる。
以上で説明したように、本発明の自律走行型掃除機は、ボディと、ボディの底面に設けられ床面の塵埃を掃き寄せる複数のサイドブラシ44と、サイドブラシ44の回転領域内にサイドブラシ44に付着した塵埃を掃き落とす清掃起毛布121を備える。
そして、清掃起毛布121と床面との間に僅かな隙間を設けられておりブリッスル束44Bは、清掃起毛布121と床面との間の隙間を通り、清掃起毛布121に接触しながら通過する。
サイドブラシ44は、床面から、所定の距離、離した上方の位置に配置されるブラシ軸と、長さの異なる、1対のブリッスル束44Bを含む。そして、長さの短い第2ブリッスル束44BBは、少なくとも先端部が清掃起毛布121と接触する長さを有するように構成される。
この構成によれば、回転時にサイドブラシに付着している塵埃は、清掃起毛布121を介して、掃き落とされる、そのため、サイドブラシ44に付着する塵埃が、再び、遠心力により、ボディの外へ掃き出されることを防止できる。さらに、サイドブラシ44に設けたブリッスル束44Bの長さは、先端部が清掃起毛布と接触する程度のため、短い。そのため、髪の毛や繊維質などの塵埃の絡み付きを抑制できる。
また、本発明の自律走行型掃除機は、所定の距離が、10mm以上18mm以下であればよい。これにより、ブラシ軸へのカーペットなどの絡み付きを抑制できる。また、段差などを乗り越える時に生じる、サイドブラシ44のブラシ軸と段差との衝突が、大幅に回避される。そのため、サイドブラシ44のブラシ軸の傷付きや破損を回避できる。
また、本発明の自律走行型掃除機は、サイドブラシ44を、ボディの左右前方の突出した位置に配置してもよい。これにより、部屋の隅角に存在する塵埃を、より確実に捕集できる。
また、本発明の自律走行型掃除機は、1対のブリッスル束44Bが、植毛により形成される第1ブリッスル束44BAおよび第2ブリッスル束44BBを含む。第1ブリッスル束44BAは、サイドブラシの回転方向における植毛方向が、第2ブリッスル束44BBに対して、所定の回転角度を設けて植毛してもよい。また、本発明の自律走行型掃除機は、所定の異なる回転角度は、8°以上、10°以下であればよい。
また、本発明の自律走行型掃除機は、1対のブリッスル束44Bは、植毛により形成される第1ブリッスル束44BAおよび第2ブリッスル束44BBを含む。第1ブリッスル束44BAは、上下方向における植毛方向が、第2ブリッスル束44BBに対して、所定の異なる傾斜角度を設けて植毛してもよい。
また、本発明の自律走行型掃除機は、所定の異なる傾斜角度は、31°以上、43°以下であればよい。
また、本発明の自律走行型掃除機は、清掃起毛布121と床面との隙間が0.5mm以上、2.0mm以下であればよい。
これらの構成によれば、捕集性能を確保しながら、サイドブラシのお手入れ頻度を低減できる。