JP7236171B2 - プロペラ - Google Patents
プロペラ Download PDFInfo
- Publication number
- JP7236171B2 JP7236171B2 JP2021553714A JP2021553714A JP7236171B2 JP 7236171 B2 JP7236171 B2 JP 7236171B2 JP 2021553714 A JP2021553714 A JP 2021553714A JP 2021553714 A JP2021553714 A JP 2021553714A JP 7236171 B2 JP7236171 B2 JP 7236171B2
- Authority
- JP
- Japan
- Prior art keywords
- propeller
- obstacle
- hub
- lift
- propellers
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H1/00—Propulsive elements directly acting on water
- B63H1/02—Propulsive elements directly acting on water of rotary type
- B63H1/12—Propulsive elements directly acting on water of rotary type with rotation axis substantially in propulsive direction
- B63H1/14—Propellers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H1/00—Propulsive elements directly acting on water
- B63H1/02—Propulsive elements directly acting on water of rotary type
- B63H1/12—Propulsive elements directly acting on water of rotary type with rotation axis substantially in propulsive direction
- B63H1/14—Propellers
- B63H1/26—Blades
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C11/00—Propellers, e.g. of ducted type; Features common to propellers and rotors for rotorcraft
- B64C11/02—Hub construction
- B64C11/04—Blade mountings
- B64C11/08—Blade mountings for non-adjustable blades
- B64C11/12—Blade mountings for non-adjustable blades flexible
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C11/00—Propellers, e.g. of ducted type; Features common to propellers and rotors for rotorcraft
- B64C11/16—Blades
- B64C11/20—Constructional features
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C27/00—Rotorcraft; Rotors peculiar thereto
- B64C27/32—Rotors
- B64C27/35—Rotors having elastomeric joints
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C27/00—Rotorcraft; Rotors peculiar thereto
- B64C27/32—Rotors
- B64C27/46—Blades
- B64C27/473—Constructional features
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D29/00—Details, component parts, or accessories
- F04D29/26—Rotors specially for elastic fluids
- F04D29/28—Rotors specially for elastic fluids for centrifugal or helico-centrifugal pumps for radial-flow or helico-centrifugal pumps
- F04D29/30—Vanes
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Aviation & Aerospace Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Ocean & Marine Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structures Of Non-Positive Displacement Pumps (AREA)
- Toys (AREA)
Description
プロペラは、小型の無人航空機、所謂ドローンにも用いられる。
このプロペラは、回転軸近くの翼弦を長く形成してホバリングに適する安定性を有する回転翼を備える。
このプロペラの回転軸及び回転翼は、可撓性を有する材料で構成されている。
このプロペラの翼は、飛行時間及び荷重の最大化のため、変化しない形状に形成される。このため、特許文献1に記載されたプロペラの剛性は高く、プロペラが他の物体に衝突したときに、翼が永続的に変形するという問題がある。
中心部と、
前記中心部から連続的に滑らかに径方向外側に向けて突出するように形成された移行部と、
前記移行部と連続的に滑らかに接続された可撓性を有する部材を含む屈曲部と、
前記屈曲部と接続され、当該屈曲部から連続的に滑らかに前記径方向外側に延びるように形成されている羽根と、
前記屈曲部の内部に配置され、前記移行部と前記羽根との間に張られた繊維と、
前記羽根の回転方向の前側に位置する前縁部と、を備え、
前記中心部、前記移行部及び前記羽根の可撓性が前記屈曲部の可撓性よりも低い。
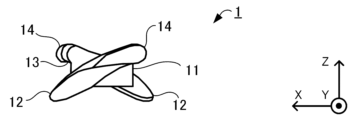
本発明の第1の実施の形態に係るプロペラ1は、例えば、ドローンに取り付けられる、二枚羽根のプロペラである。
翼部12は、後述する変形可能エッジ14と一体としてプロペラ1の回転翼(ブレード)として機能する形状に形成されている。
なお、プロペラ1の具体的な形状は、理論的に又はシミュレーションにより計算されてもよく、図1Aから図1Dに示した形状に限定されるものではない。
変形可能エッジ14は、屈曲部13と同様に、ハブ11及び翼部12に比べて可撓性の高い素材、例えば、シリコーンゴムを含む。変形可能エッジ14の剛性は、ハブ11及び翼部12の剛性よりも低い。
なお、翼部12は、請求項における後翼部の一例であり、変形可能エッジ14は、請求項における前縁部の一例である。
まず、プロペラ1の形状を設計する(ステップS1)。具体的には、例えば、数値計算ソフトウェア、シミュレータ、CAD(Computer Aided Design)ソフトウェア等を用いて、プロペラ1の各部品、すなわち、ハブ11、翼部12、屈曲部13、変形可能エッジ14等の形状を設計する。
なお、3Dプリンタを用いず、後述する成形のステップにおける方法と同様に、型を用いた成形を行うことで硬い部品を形成してもよい。
以上の工程を経て、プロペラ1が完成する。
プロペラ1の回転速度を変化させた場合にプロペラ1によって生成される揚力を測定する実験を行った。
プロペラ1によって生成される揚力を正確に測定するため、デジタルフォースゲージを用いて、プロペラ1の揚力を引張力として計測した。
また、図3Aに示すように、プロペラ1と同一の形状を有し、硬い素材のみでできている従来のプロペラ101を比較例として用いた。
図3Bに示すように、回転速度を大きくすると、プロペラ1によって生成される揚力は、従来のプロペラ101によって生成される揚力と同様に、直線的に大きくなるという結果が得られた。
また、同じ回転速度で比較すると、プロペラ1を用いて得られる揚力は、従来のプロペラ101を用いて得られる揚力に対して、約22.6%小さい。しかし、回転速度を上げることで、プロペラ1でも従来のプロペラ101と同程度の揚力が得られるという結果が得られた。
柔軟なプロペラ1によって生成される揚力は、同一の形状を有する従来のプロペラ101によって生成される揚力より小さい。しかし、回転速度を上げることで、柔軟なプロペラ1は、従来のプロペラ101と同程度の揚力を生成することができる。このため、従来のプロペラ101を柔軟なプロペラ1に置き換えてもドローンの飛行に支障は生じないと考えられる。
回転翼を障害物に接触させた場合における障害物の損傷の有無、及びプロペラ1と従来のプロペラ101の損傷の程度をそれぞれ調べる実験を行った。
障害物として、幅3mm、厚さ0.2mmのポリプロピレン製のリボンを用いた。このリボンをZ方向に張り、リボンの中央付近にプロペラ1又はプロペラ101の先端が衝突するように、プロペラ1又はプロペラ101を配置した。また、プロペラ1の回転速度を3200rpm、プロペラ101の回転速度を2800rpmに設定した。これらの回転速度は、プロペラ1、101の最高速度であり、第1の実験の結果から理解されるように、いずれも約1.3Nの揚力を生じる条件として設定されたものである。
図4B、図5Bの時点で、プロペラ1及びプロペラ101は、それぞれリボンと接触した。
図4C、図5Cの時点で、プロペラ1の翼部12は撓んでいるものの、リボンの形状は変化していない。また、この時点で、プロペラ101の回転翼は撓んでいないが、リボンの形状は折れ曲がるように変化している。
図4D、図5Dから、プロペラ1の翼部12は撓んでおらず、リボンの形状も変化していないこと、プロペラ101の回転翼は撓んでいないが、リボンは完全に破断したことが理解される。
障害物にプロペラ1を接触させた場合におけるプロペラ1の変形を調べる実験を行った。
障害物として、ナイロン繊維のコアを埋め込んだ人の指の模型を用いた。また、プロペラ1の回転速度を3200rpmに設定した。
図6Cに示した画像は、プロペラ1を回転させたまま障害物を上方に引き抜く途中の画像である。この画像から、翼部12が障害物を避けるように下方に捻れることが理解される。
図6D及び図6Eに示した画像は、障害物を取り去った直後の画像である。これらの画像から、障害物を取り去ると、翼部12及び屈曲部13の形状が復帰することが理解される。
なお、図6Aに示した画像が撮影されてから図6Eに示した画像が撮影されるまでに経過した時間は約0.4秒であるため、プロペラ1が障害物と衝突して変形してから元の形状に復帰するまでに要する時間も約0.4秒である。
屈曲部13の形状を変えて、プロペラ1が障害物と衝突した後に元の形状に復帰するまでの時間と、プロペラ1が生成する揚力の大きさを調べる実験を行った。
図7A、図7B、図7Cにそれぞれ示すように、比較例に係るプロペラ201、301、401は、屈曲部13と同一の外形形状を備える。
プロペラ201~401の屈曲部213~413は、腱15を6本ずつ備える。屈曲部213~413の直径は、いずれも0.62mmである。屈曲部213~413の長さは互いに異なっており、屈曲部213の長さはL1=6mm、屈曲部313の長さはL2=12mm、屈曲部413の長さは、L3=18mmである。
屈曲部213~413は、屈曲部13と同様に可撓性を有する材料を含むが、屈曲部13に比べて硬い材料を用いて造形されている。
理解を容易にするため、図8A~8Cには、代表的なフレームのみを示した。
これに対し、図8Bに示したように、屈曲部413の長さがL3=18mmである場合には、プロペラ401は、元の形状に復帰するまでに、Frame n+328に相当する時間、すなわち、衝突から0.342秒の時間を要した。
また、図8Cに示したように、屈曲部213の長さがL1=6mmである場合には、衝突により、プロペラ201は、不可逆的な損傷を受けたため、元の形状に復帰しなかった。
ほとんど全てのモータMの回転数において、プロペラ201、301、401の順に大きい揚力を生じた。
変形可能エッジ14を備えないプロペラについて、屈曲部13の長さを変えた場合に発生する揚力を調べるシミュレーション実験を行った。
プロペラ201~401と比較して、プロペラ501~701は、変形可能エッジ14を備えない点において異なる。
プロペラ1が腱15を備える場合と備えない場合とを比較する実験を行った。
図10Aに示すように、比較例に係るプロペラ801の屈曲部813は、腱を備えない。
屈曲部813は、ハブ11及び翼部12と重なり合って配置され、屈曲部813とハブ11、屈曲部813と翼部12がそれぞれ接合されている。
S部拡大図に示すように、屈曲部813のうち、ハブ11と重なり合った部分、翼部12と重なり合った部分のそれぞれに、ピン816が矢印で示す方向に打ち込まれている。
図10Cに示すように、プロペラ801の翼部12の先端は、回転軸に平行に配置された定規の目盛りで、35.5mmを指している。
このため、腱15は、プロペラ1の剛性を向上させることに寄与していることが理解される。
図11Bに示すように、プロペラ801の翼部12の先端は、回転軸に平行に配置された定規の目盛りで、58.5mmを指していた。プロペラ801の翼部12の先端を基準位置まで16.5mm押し下げるために必要な力の大きさは0.039Nであった。
このため、腱15は、プロペラ1の剛性を向上させることに寄与していることが理解される。また、屈曲部13の材料、腱15の材料及び直径、腱15の数等が、プロペラ1の剛性に影響を与えることが推測される。
また、モータMの回転速度が大きくなるにつれて、プロペラ801とプロペラ301が生成する揚力の大きさの差が大きくなるという結果が得られた。
さらに、2000rpmを超えるモータMの回転速度では、腱15を備えないプロペラ801の屈曲部813が損傷するため、測定自体を行うことができなかった。
これらの結果が得られたのは、腱15を備えないプロペラ801は、腱15を備えるプロペラ301に比べて、モータMの回転速度が大きくなるにつれて遠心力の影響を強く受けるためであると考えられる。
このため、腱15は、高い回転速度において、プロペラ1全体の形状を維持し、プロペラ1の揚力を向上させることに寄与していることが理解される。
シミュレーションでは、モータMの回転速度が大きくなれば、揚力も大きくなることが予想された。実験結果は、ほぼシミュレーションに沿うものであり、モータMの回転速度が大きくなれば、プロペラ801、301によって生成される揚力も大きくなった。
ドローンを飛行させ、プロペラ1と従来のプロペラ101を障害物に接触させた場合における衝撃力の違いを調べる実験を行った。
また、ほぼ全ての時間において、プロペラ1が硬い障害物ROに与えた衝撃力の大きさは、プロペラ101が硬い障害物ROに与えた衝撃力の大きさを超えなかった。
プロペラ1は、2つの羽根を有するものとして説明されたが、羽根の数はこれに限られない。
本発明の第2の実施の形態に係るプロペラ21は、図13に示すように、2対で合計4枚の羽根を有する。これらの4枚の羽根のそれぞれの形状は、プロペラ1の羽根、すなわち、翼部12、屈曲部13及び変形可能エッジ14と同一である。4枚の羽根は、プロペラ1と異なり、回転軸を中心として90°ごとに配置されている。
プロペラ21によれば、羽根の面積がより大きいため、2枚羽根のプロペラ1に比べて飛行時の振動を低減することができる。
11 ハブ
12 翼部
13、213、313、413、513、613、713、813 屈曲部
14 変形可能エッジ
15 腱
816 ピン
M モータ
D 回転方向
H 孔
R 円環
T 移行部
CA 衝突領域
DR ドローン
FS 力センサ
RO 硬い障害物
Claims (1)
- 中心部と、
前記中心部から連続的に滑らかに径方向外側に向けて突出するように形成された移行部と、
前記移行部と連続的に滑らかに接続された可撓性を有する部材を含む屈曲部と、
前記屈曲部と接続され、当該屈曲部から連続的に滑らかに前記径方向外側に延びるように形成されている羽根と、
前記屈曲部の内部に配置され、前記移行部と前記羽根との間に張られた繊維と、
前記羽根の回転方向の前側に位置する前縁部と、を備え、
前記中心部、前記移行部及び前記羽根の可撓性が前記屈曲部の可撓性よりも低い、
プロペラ。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019198143 | 2019-10-31 | ||
| JP2019198143 | 2019-10-31 | ||
| PCT/JP2020/040775 WO2021085588A1 (ja) | 2019-10-31 | 2020-10-30 | プロペラ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2021085588A1 JPWO2021085588A1 (ja) | 2021-05-06 |
| JPWO2021085588A5 JPWO2021085588A5 (ja) | 2022-07-28 |
| JP7236171B2 true JP7236171B2 (ja) | 2023-03-09 |
Family
ID=75715198
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021553714A Active JP7236171B2 (ja) | 2019-10-31 | 2020-10-30 | プロペラ |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7236171B2 (ja) |
| WO (1) | WO2021085588A1 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4627791A (en) | 1982-11-10 | 1986-12-09 | Marshall Andrew C | Aeroelastically responsive composite propeller |
| US20160347441A1 (en) | 2015-06-01 | 2016-12-01 | Northrop Grumman Systems Corporation | Deployable propeller |
| US20180043988A1 (en) | 2016-08-09 | 2018-02-15 | Gopro, Inc. | Automated Variable Pitch Propeller Blade |
| JP2019104369A (ja) | 2017-12-12 | 2019-06-27 | ホッティーポリマー株式会社 | 回転羽根及びその製造方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2041747A1 (ja) * | 1969-05-20 | 1971-02-05 | Sud Aviation | |
| US5108262A (en) * | 1990-03-23 | 1992-04-28 | The United States Of America As Represented By The Secretary Of The Navy | High damping flexible propeller/impleller |
| US20030145541A1 (en) * | 2002-02-01 | 2003-08-07 | Brightwell Lionel L. | Scaffold plank end cap |
| US20190135419A1 (en) * | 2017-11-03 | 2019-05-09 | Vantage Robotics Llc | Foldable unmaned aerial vehicle (uav) |
-
2020
- 2020-10-30 WO PCT/JP2020/040775 patent/WO2021085588A1/ja active Application Filing
- 2020-10-30 JP JP2021553714A patent/JP7236171B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4627791A (en) | 1982-11-10 | 1986-12-09 | Marshall Andrew C | Aeroelastically responsive composite propeller |
| US20160347441A1 (en) | 2015-06-01 | 2016-12-01 | Northrop Grumman Systems Corporation | Deployable propeller |
| US20180043988A1 (en) | 2016-08-09 | 2018-02-15 | Gopro, Inc. | Automated Variable Pitch Propeller Blade |
| JP2019104369A (ja) | 2017-12-12 | 2019-06-27 | ホッティーポリマー株式会社 | 回転羽根及びその製造方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2021085588A1 (ja) | 2021-05-06 |
| JPWO2021085588A1 (ja) | 2021-05-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7264200B2 (en) | System and method for improved rotor tip performance | |
| Guo et al. | Theoretical and experimental study of a piezoelectric flapping wing rotor for micro aerial vehicle | |
| CN104691755B (zh) | 用于旋翼飞行器旋翼的梁和旋翼飞行器的旋翼 | |
| US10315757B2 (en) | Propeller blade beta twist | |
| Nguyen et al. | Towards design of a deformable propeller for drone safety | |
| JP5710005B2 (ja) | スラット、航空機の翼、航空機の動翼、航空機 | |
| JP7236171B2 (ja) | プロペラ | |
| EP3293110A1 (en) | Core material for balanced rotor blade | |
| US11396368B2 (en) | Airplane wing | |
| JP2011506160A (ja) | 航空機の翼端渦を低減するための小翼延長部 | |
| CN115906295B (zh) | 基于数字孪生的无人机健康监测方法和装置 | |
| JP2006162663A (ja) | マイクロ揺動素子 | |
| JP6053825B2 (ja) | 幾何学的なスイープを有する風力タービン翼 | |
| CN207917131U (zh) | 螺旋桨、动力组件及飞行器 | |
| JP2004010020A (ja) | 層流翼型の後縁形状 | |
| JP3644497B2 (ja) | 回転翼航空機のロータ・ブレード | |
| JP6989845B2 (ja) | ロータ | |
| JPH0727665A (ja) | 空力弾性試験用模型 | |
| Bernhard et al. | Hover testing of active rotor blade-tips using a piezo-induced bending-torsion coupled beam | |
| CN207106882U (zh) | 桨叶、螺旋桨、动力组件及无人飞行器 | |
| JP4134132B2 (ja) | ブレード翼型の設計方法 | |
| JP2002168727A (ja) | フラッタ試験用模型 | |
| JP4129045B2 (ja) | マイクロ揺動素子および可動機能素子 | |
| Wei | Design of soft torsion rotor systems at Kaman aerospace corporation | |
| CN215245500U (zh) | 桨叶保护罩及多旋翼飞行器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A529 | Written submission of copy of amendment under article 34 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A5211 Effective date: 20220407 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220407 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20220407 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221122 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230119 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230131 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230217 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7236171 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |