JP7206191B2 - 組織把持デバイスおよび関連方法 - Google Patents
組織把持デバイスおよび関連方法 Download PDFInfo
- Publication number
- JP7206191B2 JP7206191B2 JP2019522620A JP2019522620A JP7206191B2 JP 7206191 B2 JP7206191 B2 JP 7206191B2 JP 2019522620 A JP2019522620 A JP 2019522620A JP 2019522620 A JP2019522620 A JP 2019522620A JP 7206191 B2 JP7206191 B2 JP 7206191B2
- Authority
- JP
- Japan
- Prior art keywords
- arms
- arm
- valve
- item
- capture
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


































































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/12—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord
- A61B17/128—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord for applying or removing clamps or clips
- A61B17/1285—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord for applying or removing clamps or clips for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/12—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord
- A61B17/122—Clamps or clips, e.g. for the umbilical cord
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/24—Heart valves ; Vascular valves, e.g. venous valves; Heart implants, e.g. passive devices for improving the function of the native valve or the heart muscle; Transmyocardial revascularisation [TMR] devices; Valves implantable in the body
- A61F2/2442—Annuloplasty rings or inserts for correcting the valve shape; Implants for improving the function of a native heart valve
- A61F2/246—Devices for obstructing a leak through a native valve in a closed condition
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/24—Heart valves ; Vascular valves, e.g. venous valves; Heart implants, e.g. passive devices for improving the function of the native valve or the heart muscle; Transmyocardial revascularisation [TMR] devices; Valves implantable in the body
- A61F2/2442—Annuloplasty rings or inserts for correcting the valve shape; Implants for improving the function of a native heart valve
- A61F2/2466—Delivery devices therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00681—Aspects not otherwise provided for
- A61B2017/00694—Aspects not otherwise provided for with means correcting for movement of or for synchronisation with the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00743—Type of operation; Specification of treatment sites
- A61B2017/00778—Operations on blood vessels
- A61B2017/00783—Valvuloplasty
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/0084—Material properties low friction
- A61B2017/00849—Material properties low friction with respect to tissue, e.g. hollow organs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/22—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for
- A61B2017/22051—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for with an inflatable part, e.g. balloon, for positioning, blocking, or immobilisation
- A61B2017/22057—Optical properties
- A61B2017/22059—Optical properties transparent
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/22—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for
- A61B2017/22051—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for with an inflatable part, e.g. balloon, for positioning, blocking, or immobilisation
- A61B2017/22062—Implements for squeezing-off ulcers or the like on the inside of inner organs of the body; Implements for scraping-out cavities of body organs, e.g. bones; Calculus removers; Calculus smashing apparatus; Apparatus for removing obstructions in blood vessels, not otherwise provided for with an inflatable part, e.g. balloon, for positioning, blocking, or immobilisation to be filled with liquid
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/373—Surgical systems with images on a monitor during operation using light, e.g. by using optical scanners
- A61B2090/3735—Optical coherence tomography [OCT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3995—Multi-modality markers
Description
本願は、米国仮出願第62/361,953号(2016年7月13日出願、代理人事件番号52206-703.101)の利益を主張し、上記出願の全内容は、参照により本明細書に引用される。
(1.発明の分野)
本発明は、概して、医療方法、デバイス、およびシステムに関する。特に、本発明は、組織接近または弁修復等、身体組織の血管内、経皮的、または低侵襲性外科手術処置のための方法、デバイス、およびシステムに関する。より具体的には、本発明は、低侵襲性および他の手技を通した僧帽弁および三尖心臓弁、静脈弁、ならびに他の組織構造の修復のための方法およびデバイスに関する。
a) より少ない構成要素を伴うより単純なデバイス:多数かつ複雑な構成要素と関連付けられる安全性および製造リスクを増加させることなく、撓曲する構成要素の有益な弾性および耐久性を提供し得る、組織固定のための代替および/または追加の方法、デバイス、ならびにシステム。
b) 係止なしデバイス:デバイスの係止に関連する手技的リスクおよび展開後の係止機構の故障と関連付けられるリスクを排除するためのより単純なデバイスの必要性。
c) 弾性および伸縮性デバイス:弁輪(または尖)のある程度の自然膨張および収縮を保全しながら弁輪(または尖)を緩やかに締めるデバイスの必要性。
d) より小さいカテーテルサイズ/外形:これらの処置を受ける殆どの患者は、老齢かつ複数の併存疾患によって虚弱であり得ることを考慮して、24Frよりもはるかに小さい送達デバイスを作製し、血管アクセスと関連付けられるリスクを低下させる必要性もまたある。
e) 複数のデバイスサイズ:固定デバイスの組織把持能力を限定しない様式でそのような方法、デバイス、およびシステムを提供する。例えば、短い接合長さおよび/または虚弱な尖に対処するために、尖の形状および長さに適合しながら、尖の接合領域を越えて把持する能力の必要性があり得る。
f) もつれなし設計:現在の市場をリードするMitraClip(登録商標)固定デバイスは、組織握持特徴の両側上に露出される返しを有する。腱、組織、およびデバイス送達機構は、そのような露出される返しによって閉じ込められた状態になり得る。したがって、組織または送達機構が本手技中にデバイス内で膠着するリスクをさらに軽減する、デバイスの脱出および再位置付けの安全性を改良する必要性がある。
g) 可視化:患者への外傷を殆ど伴わずに本手技を安全かつ正常に実施するために、改良された可視化およびフィードバックの必要性がある。
h) 局所麻酔:理想的な手技は、全身麻酔の使用を伴わずに局所麻酔下であろう。これは、全身麻酔と関連付けられるより高いリスクを軽減する。
下記に開示される実施形態の少なくともいくつかは、これらの目的を対象とする。
僧帽弁尖を接合および修正し、僧帽弁逆流を処置するための低侵襲性および経皮的手技が、PCT公開第WO 98/35638号(特許文献1)、第WO 99/00059号、第WO 99/01377号、および第WO 00/03759号、第WO 2000/060995号、第WO 2004/103162号に説明されている。Maisano、他(1998年)Eur.J.Cardiothorac.Surg.13:240-246、Fucci、他(1995年)Eur.J.Cardiothorac.Surg.9:621-627、およびUmana、他(1998年)Ann.Thorne.Surg.66:1640-1646は、対向する弁尖の縁が逆流を減少させるためにともに縫合される、「切端」または「ボウタイ」僧帽弁修復を実施するための観血術手技を説明している。DecおよびFuster(1994年)N.Engl.J.Med.331:1564-1575およびAlvarez、他(1996年)J.Thorne.Cardiovasc.Surg.112:238-247は、拡張型心筋症の性質および処置を議論する総説論文である。
本発明は、処置部位における組織接近および修復のためのデバイス、システム、ならびに方法を提供する。本発明のデバイス、システム、および方法は、血管内、低侵襲性、および観血術手技を含む種々の治療手技における使用を見出し、腹部、胸部、心臓血管系、心臓、腸管、胃、尿路、膀胱、肺、ならびに他の器官、血管、および組織を含む、種々の解剖学的領域において使用されることができる。本発明は、遠隔組織場所、特に、利用される器具が処置部位への長く狭い蛇行した経路を通り抜けなければならないものへの低侵襲性または血管内アクセスを要求するそれらの手技において特に有用である。加えて、本発明のデバイスおよびシステムの多くは、内部組織との干渉またはそれに対する外傷を伴わずに、任意の点において患者から可逆的かつ取り外し可能であるように適合される。
本願明細書は、例えば、以下の項目も提供する。
(項目1)
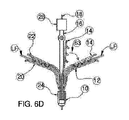
弁クリップであって、前記弁クリップは、
展開シャフトに取り外し可能に取り付けられるように構成されたハブと、
前記ハブに結合された第1の内側アームおよび第1の外側アームを備えている尖捕捉アームの第1の対と、
前記ハブに結合された第2の内側アームおよび第2の外側アームを備えている尖捕捉アームの第2の対と
を備え、
前記外側および内側アームは、離れるように付勢され、それらの間に尖捕捉空間を生成し、尖が捕捉された後、付勢解除されると、弁尖の上をおおって自己閉鎖するように構成されている、弁クリップ。
(項目2)
前記尖捕捉アームの少なくともいくつかは、板ばねとして形成されている、項目1に記載の弁クリップ。
(項目3)
前記外側および内側アームの少なくともいくつかは、前記ハブに取り付けられた弾力性のある基部および前記基部から延びているより弾力性の低い弁把持要素を伴う板ばねとして形成されている、項目2に記載の弁クリップ。
(項目4)
前記外側および内側アームの各々は、前記ハブに取り付けられた弾力性のある基部および前記基部から延びているより弾力性の低い弁把持要素を伴う板ばねとして形成されている、項目3に記載の弁クリップ。
(項目5)
前記弁把持要素は、前記外側および内側アームが付勢解除されると、共通軸から分岐し、V形状を形成する、項目4に記載の弁クリップ。
(項目6)
前記外側および内側アームの両方に対して、前記弾力性のある基部は、湾曲しており、前記弁把持要素は、直線である、項目5に記載の弁クリップ。
(項目7)
前記外側アームの弾力性のある基部は、前記外側アームの下面から前記内側アームの上面を分離するように選択されたS形曲線を有し、そのような分離は、弁尖を収容する、項目6に記載の弁クリップ。
(項目8)
前記外側アームの弾力性のある基部は、前記外側アームの下面から前記内側アームの上面を分離するように選択されたS形曲線を有し、そのような分離は、前記弁尖を収容する、項目7に記載の弁クリップ。
(項目9)
前記弁把持要素は、前記外側および内側アームが付勢解除されると、共通軸に平行である、項目5に記載の弁クリップ。
(項目10)
前記内側アームは、略直線であるが、前記外側アームの基部は、前記外側アームの下面から前記内側アームの上面を分離するように選択された曲線を有し、そのような分離は、前記弁尖を収容する、項目9に記載の弁クリップ。
(項目11)
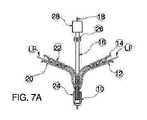
心臓弁または静脈弁に弁クリップを送達するためのシステムであって、前記システムは、
項目1に記載の弁クリップと、
前記弁クリップのハブに取り外し可能に取り付けられるように構成されている展開シャフトと
を備えている、システム。
(項目12)
前記展開シャフトは、右側の外側および内側アームと左側の外側および内側アームとの間の対称線に沿って、前記ハブから上方向に延びている、項目11に記載のシステム。
(項目13)
前記展開シャフトに結合された操向可能展開カテーテルをさらに備えている、項目12に記載のシステム。
(項目14)
前記展開シャフトの下端は、前記操向可能展開カテーテルに結合されるように構成されている、項目13に記載のシステム。
(項目15)
前記展開シャフトの上端は、前記操向可能展開カテーテルに結合されるように構成されている、項目14に記載のシステム。
(項目16)
前記操向可能展開カテーテルは、撮像構成要素を含む、項目13に記載のシステム。
(項目17)
前記撮像構成要素は、機械的尖位置インジケータ構成要素、光学撮像構成要素、超音波構成要素、およびOCT撮像構成要素のうちの1つ以上のものを含む、項目16に記載のシステム。
(項目18)
前記送達カテーテルを通して位置付けられ、前記外側アームに結合され、前記外側アームを弁尖捕捉位置に選択的に付勢するように構成されているテザーの第1の組をさらに備えている、項目11に記載のシステム。
(項目19)
前記テザーの第1の組は、前記外側アームが前記弁尖に向かって自己閉鎖するように前記外側アームを選択的に付勢解除するようにさらに構成されている、項目18に記載のシステム。
(項目20)
前記送達カテーテルを通して位置付けられ、前記内側アームに結合され、前記内側アームを弁尖捕捉位置に選択的に付勢するように構成されているテザーの第2の組をさらに備えている、項目11に記載のシステム。
(項目21)
前記テザーの第2の組は、前記内側アームが前記弁尖に向かって自己閉鎖するように前記内側アームを選択的に付勢解除するようにさらに構成されている、項目20に記載のシステム。
(項目22)
前記送達カテーテルを通して位置付けられ、前記外側アームに結合され、前記外側アームを弁尖捕捉位置に選択的に付勢するように構成されているテザーの第1の組と、前記送達カテーテルを通して位置付けられ、前記内側アームに結合され、前記内側アームを弁尖捕捉位置に選択的に付勢するように構成されているテザーの第2の組とをさらに備えている、項目11に記載のシステム。
(項目23)
前記展開シャフトに往復動可能に結合された支柱の対をさらに備え、前記支柱は、少なくとも前記2つの下側アームまたは前記2つの上側アームに係合し、前記下側および上側アームを弁尖捕捉位置に選択的に開放する、項目11に記載のシステム。
(項目24)
前記支柱は、各外側アームの上面に係合するように構成され、前記支柱を下方向に前進させることは、前記内側アームに対して前記外側アームを開放する、項目23に記載のシステム。
(項目25)
前記内側アームは、前記支柱が前進させられるとき、静止したままであるように構成されている、項目23に記載のシステム。
(項目26)
前記支柱は、各内側アームの下面に係合するように構成され、前記支柱を上方向に前進させることは、前記外側アームに対して前記内側アームを開放する、項目23に記載のシステム。
(項目27)
前記外側アームは、前記支柱が前進させられるとき、静止したままであるように構成されている、項目26に記載のシステム。
(項目28)
解剖学的弁をクリップ留めする方法であって、前記方法は、
外側アームの対および内側アームの対を有する弁クリップを前記解剖学的弁に隣接した場所に前進させることと、
(1)前記外側アームの対および(2)前記内側アームの対のうちの少なくとも1つを付勢し、隣接した外側および内側アーム間に弁尖捕捉空間を開放することと、
1つの弁尖が左外側および内側アーム間の前記弁尖捕捉空間内に位置付けられ、別の弁尖が右外側および内側アーム間の前記弁尖捕捉空間内に位置付けられるように、前記弁クリップを位置付けることと、
前記左外側および内側アームと前記右外側および内側アームとが前記弁尖の上をおおって自己閉鎖し、それらを固定するように、前記少なくとも1つの外側または内側アームの対に対する付勢を解放することと
を含む、方法。
(項目29)
初期留置後、前記弁クリップの再位置付けまたは除去を可能にするために、前記弁尖から前記内側アームを持ち上げ、前記尖から前記弁クリップを解放することをさらに含む、項目28に記載の方法。
(項目30)
前記解剖学的弁は、心臓弁である、項目29に記載の方法。
(項目31)
前記心臓弁は、僧帽弁である、項目30に記載の方法。
(項目32)
前記解剖学的弁は、静脈弁である、項目31に記載の方法。
(項目33)
前記付勢することは、前記少なくとも1つの外側または内側アームの対に取り付けられたテザーを引き寄せることを含む、項目29に記載の方法。
(項目34)
前記付勢することは、外側および内側アームの各対に取り付けられたテザーに張力を与えることを含む、項目33に記載の方法。
(項目35)
前記付勢を解放することは、前記テザーに対する張力を解放することを含む、項目34に記載の方法。
(項目36)
前記付勢することは、送達カテーテルを操作することを含み、前記弁クリップは、前記送達カテーテルの遠位端に解放可能に取り付けられている、項目29に記載の方法。
(項目37)
前記弁クリップが位置付けられているとき、前記送達カテーテル上の撮像構成要素を使用して、前記解剖学的弁および前記弁クリップを観察することをさらに含む、項目36に記載の方法。
(項目38)
前記付勢することは、支柱の対を前進させ、少なくとも前記2つの下側アームまたは前記2つの上側アームに係合させ、前記下側および上側アーム間に弁受け取り空間を選択的に開放することを含む、項目29に記載の方法。
(項目39)
前記支柱を各外側アームの上面に対して下方向に前進させることは、前記内側アームに対して前記外側アームを開放する、項目38に記載の方法。
(項目40)
前記支柱を各内側アームの下面に対して上方向に前進させることは、前記外側アームに対して前記内側アームを開放する、項目38に記載の方法。
(項目41)
前記弁クリップが位置付けられているとき、前記送達カテーテル上の撮像構成要素を使用して、前記解剖学的弁および前記弁クリップを観察することをさらに含む、項目35に記載の方法。
(項目42)
前記内側アームおよび外側アームのうちの少なくとも1つは、腱または送達システムとのもつれに抵抗するために側レールまたは障壁内に閉じ込められた返しまたは組織固定要素を有する、項目3に記載の弁クリップ。
(項目43)
前記弁把持要素は、前記外側および内側アームが付勢解除されると、共通軸から分岐し、自然尖形状にぴったり合う湾曲形状を形成する、項目4に記載の弁クリップ。
(項目44)
前記内側および外側アームは、尖の接合セグメント内で前記尖を捕捉するように構成されている、項目1に記載の弁クリップ。
(項目45)
前記内側および外側アームは、尖の接合セグメントおよび非接合セグメント内で前記尖を捕捉する、項目1に記載の弁クリップ。
(項目46)
前記内側アームおよび外側アームは、自然尖ならびに弁輪の輪郭に沿って前記接合セグメントおよび非接合セグメント内で前記尖を捕捉するように構成されている、項目45に記載の弁クリップ。
(項目47)
前記内側および外側アームは、同時に尖を捕捉するように構成されている、項目1に記載の弁クリップ。
(項目48)
前記内側および外側アームは、連続的に尖を捕捉するように構成されている、項目1に記載の弁クリップ。
(項目49)
前記内側アームおよび外側アームは、独立して尖を捕捉するように構成されている、項目1に記載の弁クリップ。
(項目50)
前記展開シャフトは、圧力センサに結合されるように構成されている、項目14に記載のシステム。
(項目51)
前記展開シャフトは、超音波センサに結合されるように構成されている、項目14に記載のシステム。
(項目52)
前記展開シャフトは、OCTシステムに結合されるように構成されている、項目14に記載のシステム。
(項目53)
前記送達カテーテルを通して位置付けられ、前記外側アームに結合され、前記外側アームから前記尖を選択的に持ち上げるように構成されているテザーの第1の組をさらに備えている、項目11に記載のシステム。
(項目54)
前記送達カテーテルを通して位置付けられ、前記内側アームに結合され、前記外側アームに対して前記内側アームを選択的に上昇および降下させるように構成されているテザーの第2の組をさらに備えている、項目53に記載のシステム。
(項目55)
前記内側および外側アームの一方の対のサイズおよび形状は、前自然僧帽弁尖を捕捉するように構成され、前記内側および外側アームの他方の対は、後自然僧帽弁尖を捕捉するように構成されている、項目1に記載の弁クリップ。
(項目56)
前記内側および外側アームの第1の対のサイズおよび形状は、第1の自然三尖弁尖を捕捉するように構成され、前記内側および外側アームの第2の対は、第2の自然三尖弁尖を捕捉するように構成され、前記内側および外側アームの第3の対は、第3の自然三尖弁尖を捕捉するように構成されている、項目1に記載の弁クリップ。
(項目57)
前記内側および外側アームの各対のサイズおよび形状は、製造を容易にするために、かつ前記弁の疾患状態の変動に適合するために、モジュール式である、項目1に記載の弁クリップ。
(項目58)
前記内側および外側アームは、弾性的に変形または延伸し、各心拍による弁輪の自然運動に部分的に適合するように構成されている、項目1に記載の弁クリップ。
(項目59)
前記内側および外側アームは、各心拍による前記捕捉された尖の変形に弾性的に抵抗するように構成されている、項目1に記載の弁クリップ。
(項目60)
前記内側および外側アームは、前記捕捉された尖を締めることによって、弁輪をより閉じて弾性的に締めるように構成されている、項目1に記載の弁クリップ。
(項目61)
前記展開シャフトに固定され、前記弁クリップに往復動可能に結合された支柱の対をさらに備え、前記支柱は、少なくとも前記2つの下側アームまたは前記2つの上側アームに係合し、前記下側および上側アームを弁尖捕捉位置に選択的に開放する、項目11に記載のシステム。
(項目62)
前記支柱は、各外側アームの上面に係合するように構成され、前記弁クリップを上方向に前進させることは、前記内側アームに対して前記外側アームを開放する、項目61に記載のシステム。
(項目63)
前記内側アームは、前記弁クリップが前記支柱に向かって前進させられるとき、静止したままであるように構成されている、項目61に記載のシステム。
(項目64)
前記支柱は、各内側アームの下面に係合するように構成され、前記弁クリップを下方向に前進させることは、前記外側アームに対して前記内側アームを開放する、項目61に記載のシステム。
(項目65)
前記展開シャフトに移動可能に結合され、前記弁クリップに往復動可能に結合された支柱の対をさらに備え、前記支柱は、少なくとも前記2つの下側アームまたは前記2つの上側アームに係合し、前記下側および上側アームを弁尖捕捉位置に選択的に開放する、項目11に記載のシステム。
(項目66)
前記支柱は、テザーの組に結合され、各外側アームの上面に係合するように構成され、前記支柱を下方向に前進させることは、前記内側アームに対して前記外側アームを開放する、項目65に記載のシステム。
(項目67)
前記支柱は、テザーの組に結合され、各内側アームの下面に係合するように構成され、前記支柱を上方向に前進させることは、前記外側アームに対して前記内側アームを開放する、項目65に記載のシステム。
(項目68)
前記内側および外側アームの第1の対と内側および外側アームの第2の対とは、同時に尖を捕捉するように構成されている、項目1に記載の弁クリップ。
(項目69)
前記内側および外側アームの第1の対と内側および外側アームの第2の対とは、連続的に尖を捕捉するように構成されている、項目1に記載の弁クリップ。
(項目70)
前記内側および外側アームの第1の対と内側および外側アームの第2の対とは、独立して尖を捕捉するように構成されている、項目1に記載の弁クリップ。
(項目71)
少なくとも外側弁葉捕捉アームは、前記アームを付勢または付勢解除するために使用されることができるテザーに解放可能に取り付けられている、項目1に記載の弁クリップ。
(項目72)
少なくとも外側弁葉捕捉アームは、前記アームを上昇または降下させることと、前記外側アームから尖を持ち上げることとを行うために使用されることができるテザーに解放可能に取り付けられている、項目1に記載の弁クリップ。
(項目73)
少なくとも外側弁葉捕捉アームは、前記外側アームを付勢または付勢解除することと、前記外側アームから尖を持ち上げ、前記尖から前記弁クリップを係合解除することとを行うために使用されることができるテザーに解放可能に取り付けられている、項目1に記載の弁クリップ。
(項目74)
外側および内側弁葉捕捉アームは、前記アームを付勢または付勢解除し、前記尖を捕捉すること、または前記アームから前記捕捉された尖を解放することを行うために使用されることができるテザーに解放可能に取り付けられている、項目1に記載の弁クリップ。
(項目75)
少なくとも外側弁葉捕捉アームは、前記アームを付勢または付勢解除し、前記尖を捕捉すること、または前記アームから前記捕捉された尖を解放することと、前記弁クリップを回収することとを行うために使用されることができるテザーに解放可能に取り付けられている、項目1に記載の弁クリップ。
(項目76)
前記内側および外側アームの第1の対と内側および外側アームの第2の対とは、同時に尖を捕捉するように構成されている、項目11に記載の弁クリップ。
(項目77)
前記内側および外側アームの第1の対と内側および外側アームの第2の対とは、連続的に尖を捕捉するように構成されている、項目11に記載の弁クリップ。
(項目78)
前記内側および外側アームの第1の対と内側および外側アームの第2の対とは、独立して尖を捕捉するように構成されている、項目11に記載の弁クリップ。
(項目79)
少なくとも外側弁葉捕捉アームは、前記アームを付勢または付勢解除するために使用されることができるテザーに解放可能に取り付けられている、項目11に記載の弁クリップ。
(項目80)
少なくとも外側弁葉捕捉アームは、前記アームを上昇または降下させることと、前記外側アームから尖を持ち上げることとを行うために使用されることができるテザーに解放可能に取り付けられている、項目11に記載の弁クリップ。
(項目81)
少なくとも外側弁葉捕捉アームは、前記外側アームを付勢または付勢解除することと、前記外側アームから尖を持ち上げ、前記尖から前記弁クリップを係合解除することとを行うために使用されることができるテザーに解放可能に取り付けられている、項目11に記載の弁クリップ。
(項目82)
外側および内側弁葉捕捉アームは、前記アームを付勢または付勢解除し、前記尖を捕捉すること、または前記アームから前記捕捉された尖を解放することを行うために使用されることができるテザーに解放可能に取り付けられている、項目11に記載の弁クリップ。
(項目83)
少なくとも外側弁葉捕捉アームは、前記アームを付勢または付勢解除し、前記尖を捕捉すること、または前記アームから前記捕捉された尖を解放することと、前記弁クリップを回収することとを行うために使用されることができるテザーに解放可能に取り付けられている、項目11に記載の弁クリップ。
(項目84)
前記内側および外側アームの第1の対と内側および外側アームの第2の対とは、同時に尖を捕捉するように構成されている、項目11に記載の弁クリップ。
(項目85)
前記内側および外側アームの第1の対と内側および外側アームの第2の対とは、連続的に尖を捕捉するように構成されている、項目11に記載の弁クリップ。
(項目86)
前記内側および外側アームの第1の対と内側および外側アームの第2の対とは、独立して尖を捕捉するように構成されている、項目11に記載の弁クリップ。
(項目87)
少なくとも外側弁葉捕捉アームは、前記アームを付勢または付勢解除するために使用されることができるテザーに解放可能に取り付けられている、項目11に記載の弁クリップ。
(項目88)
少なくとも外側弁葉捕捉アームは、前記アームを上昇または降下させることと、前記外側アームから尖を持ち上げることとを行うために使用されることができるテザーに解放可能に取り付けられている、項目11に記載の弁クリップ。
(項目89)
少なくとも外側弁葉捕捉アームは、前記外側アームを付勢または付勢解除することと、前記外側アームから尖を持ち上げ、前記尖から前記弁クリップを係合解除することとを行うために使用されることができるテザーに解放可能に取り付けられている、項目11に記載の弁クリップ。
(項目90)
前記外側および内側弁葉捕捉アームは、前記アームを付勢または付勢解除し、前記尖を捕捉すること、または前記アームから前記捕捉された尖を解放することを行うために使用されることができるテザーに解放可能に取り付けられている、項目11に記載の弁クリップ。
(項目91)
少なくとも前記外側弁葉捕捉アームは、前記アームを付勢または付勢解除し、前記尖を捕捉すること、または前記アームから前記捕捉された尖を解放することと、前記弁クリップを回収することとを行うために使用されることができるテザーに解放可能に取り付けられている、項目11に記載の弁クリップ。
(I.心臓生理機能)
収縮期における正常な心臓Hの左心室LVが、図1A-1に図示される。左心室LVは、収縮しており、血流が、矢印の方向において三尖(僧帽)弁AVを通して外向きに流動する。僧帽弁MVを通した血液の還流または「逆流」は、僧帽弁が、左心室内の圧力が左心房LA内のものよりも高いときに還流を防止する「逆止弁」として構成されるため、防止される。僧帽弁MVは、図1A-1に図示されるように、閉鎖するように均一に接する自由縁FEを有する尖の対を備えている。尖LFの対向する端部は、弁輪ANと称される環状領域に沿って周辺心臓構造に付着する。尖LFの自由縁FEは、弁尖LFのそれぞれの下面の上をおおって固定される複数の分岐する腱を含む腱索CT(以降では腱と称される)を通して左心室LVの下側部分に固定される。腱CTは、順に、乳頭筋PMに付着し、これは、左心室の下側部分および心室内中隔IVSから上向きに延びている。
本発明は、心臓弁逆流、特に、僧帽弁逆流を処置するために、弁尖等の組織を把持し、接近させ、固定する方法およびデバイスを提供する。本発明はまた、そのように所望される場合、特に、除去が腱CT等の解剖学的特徴によって妨げられ得る面積において、デバイスの再位置付けおよび除去を可能にする特徴を提供する。そのような除去は、そのように所望される場合、外科医が新しい様式で弁に再アプローチすることを可能にするであろう。




Claims (7)
- 弁クリップであって、前記弁クリップは、
展開シャフトに取り外し可能に取り付けられるように構成されたハブと、
前記ハブに結合された第1の内側アームおよび第1の外側アームを備えている尖捕捉アームの第1の対と、
前記ハブに結合された第2の内側アームおよび第2の外側アームを備えている尖捕捉アームの第2の対と
を備え、
各対の前記外側および内側アームは、前記ハブに弾力的に取り付けられており、各対の前記外側および内側アームは、付勢力により離れるように付勢され、それらの間に尖捕捉空間を生成し、弁尖が捕捉された後、前記付勢力が解放されると、前記尖の上をおおって自己閉鎖するように構成されており、
前記外側および内側アームの各々は、前記ハブに取り付けられた弾力性のある基部および前記基部から延びているより弾力性の低い弁把持要素を伴う板ばねとして形成されており、
前記外側および内側アームの両方に対して、前記弁把持要素は、直線であり、前記弾力性のある基部は、湾曲しており、
前記外側アームの弾力性のある基部は、前記内側アームの下面から前記外側アームの上面を分離するように選択されたS形曲線を有し、
そのような分離は、前記弁尖を収容する、弁クリップ。 - 心臓弁または静脈弁に弁クリップを送達するためのシステムであって、前記システムは、
請求項1に記載の弁クリップと、
前記弁クリップのハブに取り外し可能に取り付けられるように構成されている展開シャフトと
を備えている、システム。 - 前記展開シャフトは、右側の外側および内側アームと左側の外側および内側アームとの間の対称線に沿って、前記ハブから上方向に延びている、請求項2に記載のシステム。
- 前記展開シャフトに結合された操向可能展開カテーテルをさらに備え、
前記展開シャフトの下端は、前記操向可能展開カテーテルに結合されるように構成されている、請求項3に記載のシステム。 - 前記展開シャフトに結合された操向可能展開カテーテルをさらに備え、
前記操向可能展開カテーテルは、撮像構成要素を含む、請求項3に記載のシステム。 - 操向可能展開カテーテルを通して位置付けられ、前記外側アームに結合され、前記弁尖を捕捉するために前記外側アームを選択的に付勢するように構成されているテザーの第1の組をさらに備えている、請求項2に記載のシステム。
- 操向可能展開カテーテルを通して位置付けられ、前記内側アームに結合され、前記弁尖を捕捉するために前記内側アームを選択的に付勢するように構成されているテザーの第2の組をさらに備え、前記テザーの第2の組は、前記内側アームが前記弁尖に向かって自己閉鎖するように前記内側アームを選択的に付勢解除するようにさらに構成されている、請求項2に記載のシステム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022001622A JP2022033350A (ja) | 2016-07-13 | 2022-01-07 | 組織把持デバイスおよび関連方法 |
| JP2023216469A JP2024019679A (ja) | 2016-07-13 | 2023-12-22 | 組織把持デバイスおよび関連方法 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662361953P | 2016-07-13 | 2016-07-13 | |
| US62/361,953 | 2016-07-13 | ||
| PCT/US2017/042003 WO2018013856A1 (en) | 2016-07-13 | 2017-07-13 | Tissue grasping devices and related methods |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022001622A Division JP2022033350A (ja) | 2016-07-13 | 2022-01-07 | 組織把持デバイスおよび関連方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019522555A JP2019522555A (ja) | 2019-08-15 |
| JP2019522555A5 JP2019522555A5 (ja) | 2020-08-20 |
| JP7206191B2 true JP7206191B2 (ja) | 2023-01-17 |
Family
ID=60951925
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019522620A Active JP7206191B2 (ja) | 2016-07-13 | 2017-07-13 | 組織把持デバイスおよび関連方法 |
| JP2022001622A Withdrawn JP2022033350A (ja) | 2016-07-13 | 2022-01-07 | 組織把持デバイスおよび関連方法 |
| JP2023216469A Pending JP2024019679A (ja) | 2016-07-13 | 2023-12-22 | 組織把持デバイスおよび関連方法 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022001622A Withdrawn JP2022033350A (ja) | 2016-07-13 | 2022-01-07 | 組織把持デバイスおよび関連方法 |
| JP2023216469A Pending JP2024019679A (ja) | 2016-07-13 | 2023-12-22 | 組織把持デバイスおよび関連方法 |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP3484375A4 (ja) |
| JP (3) | JP7206191B2 (ja) |
| CN (1) | CN109715078B (ja) |
| WO (1) | WO2018013856A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11883290B2 (en) | 2018-04-24 | 2024-01-30 | Raghuveer Basude | Retrievable tissue grasping devices, spacers, artificial valves and related methods |
Families Citing this family (42)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8449599B2 (en) | 2009-12-04 | 2013-05-28 | Edwards Lifesciences Corporation | Prosthetic valve for replacing mitral valve |
| JP6700278B2 (ja) | 2014-12-04 | 2020-05-27 | エドワーズ ライフサイエンシーズ コーポレイションEdwards Lifesciences Corporation | 心臓弁を修復するための経皮的クリップ |
| EP3294219B1 (en) | 2015-05-14 | 2020-05-13 | Edwards Lifesciences Corporation | Heart valve sealing devices and delivery devices therefor |
| US10799675B2 (en) | 2016-03-21 | 2020-10-13 | Edwards Lifesciences Corporation | Cam controlled multi-direction steerable handles |
| US10835714B2 (en) | 2016-03-21 | 2020-11-17 | Edwards Lifesciences Corporation | Multi-direction steerable handles for steering catheters |
| US11219746B2 (en) | 2016-03-21 | 2022-01-11 | Edwards Lifesciences Corporation | Multi-direction steerable handles for steering catheters |
| US10973638B2 (en) | 2016-07-07 | 2021-04-13 | Edwards Lifesciences Corporation | Device and method for treating vascular insufficiency |
| US11185413B2 (en) | 2016-07-13 | 2021-11-30 | Medfree, Inc. | Tissue grasping devices and related methods |
| US10653862B2 (en) | 2016-11-07 | 2020-05-19 | Edwards Lifesciences Corporation | Apparatus for the introduction and manipulation of multiple telescoping catheters |
| US10905554B2 (en) | 2017-01-05 | 2021-02-02 | Edwards Lifesciences Corporation | Heart valve coaptation device |
| LT3682854T (lt) | 2017-04-18 | 2022-03-10 | Edwards Lifesciences Corporation | Širdies vožtuvo sandarinimo įrenginiai ir jų perdavimo įtaisai |
| US11224511B2 (en) | 2017-04-18 | 2022-01-18 | Edwards Lifesciences Corporation | Heart valve sealing devices and delivery devices therefor |
| US10799312B2 (en) | 2017-04-28 | 2020-10-13 | Edwards Lifesciences Corporation | Medical device stabilizing apparatus and method of use |
| US10959846B2 (en) | 2017-05-10 | 2021-03-30 | Edwards Lifesciences Corporation | Mitral valve spacer device |
| US11051940B2 (en) | 2017-09-07 | 2021-07-06 | Edwards Lifesciences Corporation | Prosthetic spacer device for heart valve |
| US11065117B2 (en) | 2017-09-08 | 2021-07-20 | Edwards Lifesciences Corporation | Axisymmetric adjustable device for treating mitral regurgitation |
| US11110251B2 (en) | 2017-09-19 | 2021-09-07 | Edwards Lifesciences Corporation | Multi-direction steerable handles for steering catheters |
| US10136993B1 (en) | 2018-01-09 | 2018-11-27 | Edwards Lifesciences Corporation | Native valve repair devices and procedures |
| US10111751B1 (en) | 2018-01-09 | 2018-10-30 | Edwards Lifesciences Corporation | Native valve repair devices and procedures |
| US10973639B2 (en) | 2018-01-09 | 2021-04-13 | Edwards Lifesciences Corporation | Native valve repair devices and procedures |
| MX2020005397A (es) | 2018-01-09 | 2020-08-17 | Edwards Lifesciences Corp | Dispositivos y procedimientos de reparacion de valvulas nativas. |
| US10105222B1 (en) | 2018-01-09 | 2018-10-23 | Edwards Lifesciences Corporation | Native valve repair devices and procedures |
| US10231837B1 (en) | 2018-01-09 | 2019-03-19 | Edwards Lifesciences Corporation | Native valve repair devices and procedures |
| US10238493B1 (en) | 2018-01-09 | 2019-03-26 | Edwards Lifesciences Corporation | Native valve repair devices and procedures |
| US10245144B1 (en) | 2018-01-09 | 2019-04-02 | Edwards Lifesciences Corporation | Native valve repair devices and procedures |
| US10159570B1 (en) | 2018-01-09 | 2018-12-25 | Edwards Lifesciences Corporation | Native valve repair devices and procedures |
| US10076415B1 (en) | 2018-01-09 | 2018-09-18 | Edwards Lifesciences Corporation | Native valve repair devices and procedures |
| US10123873B1 (en) | 2018-01-09 | 2018-11-13 | Edwards Lifesciences Corporation | Native valve repair devices and procedures |
| WO2019143726A1 (en) * | 2018-01-16 | 2019-07-25 | Medfree, Inc. | Tissue grasping devices and related methods |
| AU2019235774B2 (en) * | 2018-03-14 | 2021-01-28 | Boston Scientific Scimed, Inc. | Tissue retraction device and delivery system |
| US11389297B2 (en) | 2018-04-12 | 2022-07-19 | Edwards Lifesciences Corporation | Mitral valve spacer device |
| US11207181B2 (en) | 2018-04-18 | 2021-12-28 | Edwards Lifesciences Corporation | Heart valve sealing devices and delivery devices therefor |
| EP3796876B1 (en) | 2018-05-22 | 2022-07-27 | Boston Scientific Scimed, Inc. | Percutaneous papillary muscle relocation |
| US10945844B2 (en) | 2018-10-10 | 2021-03-16 | Edwards Lifesciences Corporation | Heart valve sealing devices and delivery devices therefor |
| BR122021018576A2 (pt) | 2019-02-14 | 2021-10-13 | Edwards Lifesciences Corporation | Dispositivo de reparo de válvula para reparar uma válvula nativa de um paciente e sistema de reparo de válvula |
| CN114449979A (zh) * | 2019-07-15 | 2022-05-06 | 埃瓦尔维公司 | 独立的近端元件致动方法 |
| CN114786595A (zh) * | 2019-12-09 | 2022-07-22 | 波士顿科学国际有限公司 | 用于瓣膜的边对边修复装置 |
| WO2022198065A1 (en) * | 2021-03-19 | 2022-09-22 | Evalve, Inc. | Systems for tissue grasping and assessment |
| CN113017929A (zh) * | 2021-04-02 | 2021-06-25 | 上海汇禾医疗科技有限公司 | 夹合器械 |
| US20230020981A1 (en) * | 2021-07-14 | 2023-01-19 | Boston Scientific Scimed, Inc. | Mitral valve leaflet clip |
| WO2023196183A1 (en) * | 2022-04-04 | 2023-10-12 | Edwards Lifesciences Corporation | Heart valve repair devices and delivery devices therefor |
| WO2023249916A1 (en) * | 2022-06-21 | 2023-12-28 | Boston Scientific Scimed, Inc. | Devices, systems, and methods for delivering and deploying an implantable device |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006528911A (ja) | 1999-04-09 | 2006-12-28 | エヴァルヴ インコーポレイテッド | 固着装置、組織に係合するための装置および方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6752813B2 (en) * | 1999-04-09 | 2004-06-22 | Evalve, Inc. | Methods and devices for capturing and fixing leaflets in valve repair |
| US9011468B2 (en) * | 2011-09-13 | 2015-04-21 | Abbott Cardiovascular Systems Inc. | Independent gripper |
| CA2856549A1 (en) * | 2011-12-01 | 2013-06-06 | Neochord, Inc. | Surgical navigation for repair of heart valve leaflets |
| WO2014136056A1 (en) * | 2013-03-04 | 2014-09-12 | Medical Research, Infrastructure And Health Services Fund Of The Tel-Aviv Medical Center | Cardiac valve commissure brace |
| US9572666B2 (en) * | 2014-03-17 | 2017-02-21 | Evalve, Inc. | Mitral valve fixation device removal devices and methods |
| US10667815B2 (en) * | 2015-07-21 | 2020-06-02 | Evalve, Inc. | Tissue grasping devices and related methods |
-
2017
- 2017-07-13 EP EP17828492.3A patent/EP3484375A4/en active Pending
- 2017-07-13 WO PCT/US2017/042003 patent/WO2018013856A1/en unknown
- 2017-07-13 JP JP2019522620A patent/JP7206191B2/ja active Active
- 2017-07-13 CN CN201780056353.5A patent/CN109715078B/zh active Active
-
2022
- 2022-01-07 JP JP2022001622A patent/JP2022033350A/ja not_active Withdrawn
-
2023
- 2023-12-22 JP JP2023216469A patent/JP2024019679A/ja active Pending
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006528911A (ja) | 1999-04-09 | 2006-12-28 | エヴァルヴ インコーポレイテッド | 固着装置、組織に係合するための装置および方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11883290B2 (en) | 2018-04-24 | 2024-01-30 | Raghuveer Basude | Retrievable tissue grasping devices, spacers, artificial valves and related methods |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3484375A1 (en) | 2019-05-22 |
| JP2024019679A (ja) | 2024-02-09 |
| EP3484375A4 (en) | 2020-07-22 |
| JP2022033350A (ja) | 2022-02-28 |
| WO2018013856A1 (en) | 2018-01-18 |
| JP2019522555A (ja) | 2019-08-15 |
| CN109715078A (zh) | 2019-05-03 |
| CN109715078B (zh) | 2022-05-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7206191B2 (ja) | 組織把持デバイスおよび関連方法 | |
| US11185413B2 (en) | Tissue grasping devices and related methods | |
| US11723769B2 (en) | Tissue grasping devices and related methods | |
| US11883290B2 (en) | Retrievable tissue grasping devices, spacers, artificial valves and related methods | |
| JP7134229B2 (ja) | 組織把持デバイスおよび関連方法 | |
| US11654018B2 (en) | Heart and peripheral vascular valve replacement in conjunction with a support ring | |
| US20220354637A1 (en) | Coaptation enhancement implant, system, and method | |
| US10568740B2 (en) | Device and method to plicate the tricuspid valve | |
| JP4611991B2 (ja) | 固着装置、組織に係合するための装置および方法 | |
| EP2111189B1 (en) | Implantable devices for controlling the size and shape of an anatomical structure or lumen | |
| JP5646334B2 (ja) | 僧帽弁逆流の直接的弁輪縫縮術処置で用いるための押し込み式リテーナシステム | |
| US20070093869A1 (en) | Device, system, and method for contracting tissue in a mammalian body | |
| JP2005534419A (ja) | 房室弁修復のための装置 | |
| US20100298930A1 (en) | Access to the left atrium and reduction of mitral valve leaflet mobility | |
| CA2710360A1 (en) | Cardiac valve downsizing device and method | |
| JP2008534085A (ja) | 心臓弁輪を再形成するための装置、システム、および方法 | |
| JP2012505039A (ja) | 僧帽弁逆流の直接的弁輪縫縮術に使用するための形成可能な線形締結具を有するひだ形成装置 | |
| JP2023518978A (ja) | 組織把持デバイスおよび関連する方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200709 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200709 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210414 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210423 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210713 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20210908 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220107 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20220107 |
|
| C11 | Written invitation by the commissioner to file amendments |
Free format text: JAPANESE INTERMEDIATE CODE: C11 Effective date: 20220118 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20220302 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20220303 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20220428 |
|
| C211 | Notice of termination of reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C211 Effective date: 20220506 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20220527 |
|
| C13 | Notice of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: C13 Effective date: 20220708 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220915 |
|
| C23 | Notice of termination of proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C23 Effective date: 20221109 |
|
| C03 | Trial/appeal decision taken |
Free format text: JAPANESE INTERMEDIATE CODE: C03 Effective date: 20221206 |
|
| C30A | Notification sent |
Free format text: JAPANESE INTERMEDIATE CODE: C3012 Effective date: 20221206 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230104 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7206191 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |