JP7204093B2 - 検知装置、検知方法及びプログラム - Google Patents
検知装置、検知方法及びプログラム Download PDFInfo
- Publication number
- JP7204093B2 JP7204093B2 JP2018191275A JP2018191275A JP7204093B2 JP 7204093 B2 JP7204093 B2 JP 7204093B2 JP 2018191275 A JP2018191275 A JP 2018191275A JP 2018191275 A JP2018191275 A JP 2018191275A JP 7204093 B2 JP7204093 B2 JP 7204093B2
- Authority
- JP
- Japan
- Prior art keywords
- predetermined
- value
- livestock
- delivery
- component values
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Landscapes
- Arrangements For Transmission Of Measured Signals (AREA)
Description
まず、本実施形態に係る分娩検知システム1の全体構成について、図1を参照しながら説明する。図1は、本実施形態に係る分娩検知システム1の全体構成の一例を示す図である。
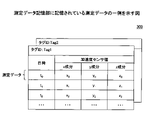
ここで、本実施形態に係る測定データ記憶部300に記憶されている測定データについて、図2を参照しながら説明する。図2は、測定データ記憶部300に記憶されている測定データの一例を示す図である。なお、分娩検知装置10は、タグ20から測定データを受信した場合、第1の分娩検知処理部100又は第2の分娩検知処理部200により、当該測定データを測定データ記憶部300に記憶(蓄積)させれば良い。
次に、本実施形態に係る活動量データ記憶部400に記憶されている活動量データについて、図3を参照しながら説明する。図3は、活動量データ記憶部400に記憶されている活動量データの一例を示す図である。
次に、本実施形態に係る第1の分娩検知処理部100の機能構成について、図4を参照しながら説明する。図4は、第1の分娩検知処理部100の機能構成の一例を示す図である。
次に、本実施形態に係る第2の分娩検知処理部200の機能構成について、図5を参照しながら説明する。図5は、第2の分娩検知処理部200の機能構成の一例を示す図である。
以降では、第1の分娩検知処理(すなわち、牛の分娩を事前に検知する場合の処理)について、図6を参照しながら説明する。図6は、第1の分娩検知処理の一例を示すフローチャートである。なお、図6に示す処理は、例えば、10分毎に繰り返し実行される。ただし、10分は一例であって、任意の時間毎に繰り返し実行されても良い。以降では、この繰り返し回数を表すインデックスをkとする。したがって、kは、当該繰り返し開始時点の或る時刻(例えば、現在時刻)を表す時刻インデックスでもある。この場合、例えば、k-1は当該或る時刻から10分前の時刻を表し、k-2は当該或る時刻から20分前の時刻を表す。
また、局所的に最小値となるy成分加速度センサ値をピークとする場合(すなわち、y成分加速度センサ値の極小値をピークとする場合)、第1のピーク数計算部103は、例えば、以下の式(2)を満たすy成分加速度センサ値yi(i=1,・・・,N)をピークとして、ピーク数を計算する。
ここで、上記の式(1)及び(2)のδは、予め設定されたパラメータである。なお、上記の式(1)及び(2)でδはそれぞれ異なっていても良い。
以降では、第2の分娩検知処理(すなわち、牛の分娩を事後的に検知する場合の処理)について、図9を参照しながら説明する。図9は、第2の分娩検知処理の一例を示すフローチャートである。なお、図9に示す処理は、例えば、10分毎に繰り返し実行される。ただし、10分は一例であって、任意の時間毎に繰り返し実行されても良い。以降では、この繰り返し回数を表すインデックスをkとする。したがって、kは、当該繰り返し開始時点の或る時刻(例えば、現在時刻)を表す時刻インデックスでもある。この場合、例えば、k-1は当該或る時刻から10分前の時刻を表し、k-2は当該或る時刻から20分前の時刻を表す。
10 分娩検知装置
100 第1の分娩検知処理部
101 取得部
102 前処理部
103 第1のピーク数計算部
104 活動量計算部
105 指標値計算部
106 比較判定部
107 累積値計算部
108 第1の分娩検知部
200 第2の分娩検知処理部
201 取得部
202 前処理部
203 第2のピーク数計算部
204 第2の分娩検知部
300 測定データ記憶部
400 活動量データ記憶部
Claims (12)
- 家畜の分娩を検知する検知装置であって、
前記家畜に装着された三軸加速度センサが測定した加速度データを記憶する記憶手段と、
所定の時間の間における複数の加速度データにそれぞれ含まれる所定の方向の成分値を前記記憶手段から取得する取得手段と、
複数の前記成分値のうち局所的に最大又は最小となる成分値を示すピークの数から計算される活動量と所定の指標値との比較に基づいて、前記家畜の分娩を検知する検知手段と、
を有することを特徴とする検知装置。 - 前記ピークの数を計算する第1のピーク数計算手段と、
前記ピークの数の合計を活動量として計算する活動量計算手段と、
前記活動量計算手段により計算された過去の活動量を用いて、前記指標値を計算する指標値計算手段と、
前記活動量と前記指標値との大小関係を比較判定する比較手段と、
前記活動量が前記指標値よりも大きいと判定された場合、前記活動量と前記指標値との差を累積した累積値を計算する累積値計算手段と、
を有し
前記検知手段は、
前記累積値が所定の第1の閾値以上である場合に、前記家畜の分娩を検知する、ことを特徴とする請求項1に記載の検知装置。 - 前記指標値計算手段は、
前記過去の活動量の平均値と、前記過去の活動量の標準偏差と、所定の定数とを用いて、前記標準偏差と前記定数との積に対して前記平均値を加算することで、前記指標値を計算する、ことを特徴とする請求項2に記載の検知装置。 - 前記累積値計算手段は、
前記活動量が前記指標値よりも大きいと判定されなかった場合、前記累積値を0にクリアする、ことを特徴とする請求項2又は3に記載の検知装置。 - 家畜の分娩を検知する検知装置であって、
前記家畜に装着された三軸加速度センサが測定した加速度データを記憶する記憶手段と、
所定の時間の間における複数の加速度データにそれぞれ含まれる所定の方向の成分値を前記記憶手段から取得する取得手段と、
複数の前記成分値のうち局所的に最大又は最小となる成分値を示すピークの数と所定の第2の閾値との比較、及び、複数の前記成分値と所定の第3の閾値又は第4の閾値との比較に基づいて、前記家畜の分娩を検知する検知手段と、
を有することを特徴とする検知装置。 - 複数の前記成分値のうち局所的に最大又は最小となる成分値であって、かつ、所定の条件を満たす成分値の数を前記ピークの数として計算する第2のピーク数計算手段を有し、
前記検知手段は、
前記ピークの数が前記第2の閾値以上、かつ、複数の前記成分値の平均値が前記第3の閾値以上又は前記第4の閾値以下である場合に、前記家畜の分娩を検知する、ことを特徴とする請求項5に記載の検知装置。 - 前記所定の条件は、
前記局所的に最大となる成分値と、前記局所的に最小となる成分値とを前記ピークの候補とした場合に、1つ前の候補との差が所定の値以下である、ことを特徴とする請求項5又は6に記載の検知装置。 - 家畜の分娩を検知する検知装置であって、
前記家畜に装着された三軸加速度センサが測定した加速度データを記憶する記憶手段と、
所定の時間の間における複数の加速度データにそれぞれ含まれる所定の方向の成分値を前記記憶手段から取得する取得手段と、
複数の前記成分値のうち局所的に最大又は最小となる成分値を示すピークの数から計算される活動量と所定の指標値との比較に基づいて、前記家畜の分娩を検知する検知手段と、
前記検知手段による検知結果を、所定の端末に通知する通知手段と、
を有することを特徴とする検知装置。 - 家畜の分娩を検知する検知装置であって、
前記家畜に装着された三軸加速度センサが測定した加速度データを記憶する記憶手段と、
所定の時間の間における複数の加速度データにそれぞれ含まれる所定の方向の成分値を前記記憶手段から取得する取得手段と、
複数の前記成分値のうち局所的に最大又は最小となる成分値を示すピークの数と所定の第2の閾値との比較、及び、複数の前記成分値と所定の第3の閾値又は第4の閾値との比較に基づいて、前記家畜の分娩を検知する検知手段と、
前記検知手段による検知結果を、所定の端末に通知する通知手段と、
を有することを特徴とする検知装置。 - 家畜の分娩を検知する検知装置が、
前記家畜に装着された三軸加速度センサが測定した加速度データを記憶手段に記憶させる記憶手順と、
所定の時間の間における複数の加速度データにそれぞれ含まれる所定の方向の成分値を前記記憶手段から取得する取得手順と、
複数の前記成分値のうち局所的に最大又は最小となる成分値を示すピークの数から計算される活動量と所定の指標値との比較に基づいて、前記家畜の分娩を検知する検知手順と、
を実行することを特徴とする検知方法。 - 家畜の分娩を検知する検知装置が、
前記家畜に装着された三軸加速度センサが測定した加速度データを記憶手段に記憶させる記憶手順と、
所定の時間の間における複数の加速度データにそれぞれ含まれる所定の方向の成分値を前記記憶手段から取得する取得手順と、
複数の前記成分値のうち局所的に最大又は最小となる成分値を示すピークの数と所定の第2の閾値との比較、及び、複数の前記成分値と所定の第3の閾値又は第4の閾値との比較に基づいて、前記家畜の分娩を検知する検知手順と、
を実行することを特徴とする検知方法。 - コンピュータを、請求項1乃至9の何れか一項に記載の検知装置における各手段として機能させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018191275A JP7204093B2 (ja) | 2018-10-09 | 2018-10-09 | 検知装置、検知方法及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018191275A JP7204093B2 (ja) | 2018-10-09 | 2018-10-09 | 検知装置、検知方法及びプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2020058277A JP2020058277A (ja) | 2020-04-16 |
| JP2020058277A5 JP2020058277A5 (ja) | 2021-11-25 |
| JP7204093B2 true JP7204093B2 (ja) | 2023-01-16 |
Family
ID=70219161
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018191275A Active JP7204093B2 (ja) | 2018-10-09 | 2018-10-09 | 検知装置、検知方法及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7204093B2 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2022053394A (ja) * | 2020-09-24 | 2022-04-05 | デザミス株式会社 | 家畜の分娩検知システム及び分娩検知方法 |
| KR102635759B1 (ko) * | 2021-06-23 | 2024-02-14 | 경상국립대학교산학협력단 | 가속도 센서를 이용한 한우 분만 알림 시스템 |
| CN116058298B (zh) * | 2023-03-06 | 2023-09-12 | 北京市农林科学院信息技术研究中心 | 家畜行为监测方法及装置 |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003325077A (ja) | 2002-05-14 | 2003-11-18 | Komutekku:Kk | 振動数値の解析による牛・豚、馬等の発情・分娩日時の予知、疾病の発見方法とそれに用いる装着型発情・分娩日時予知、疾病発見装置。 |
| JP2005110880A (ja) | 2003-10-06 | 2005-04-28 | Tsuken:Kk | 牛馬の分娩予兆警告装置 |
| JP2007124966A (ja) | 2005-11-04 | 2007-05-24 | Technos Japan:Kk | 動物の発情情報、出産情報及び/又は生体情報検知装置。 |
| JP2007296312A (ja) | 2006-11-02 | 2007-11-15 | Remote:Kk | 分娩予知通報システムの測温/送信モジュール |
| JP2007296042A (ja) | 2006-04-28 | 2007-11-15 | Remote:Kk | 分娩予知通報システム |
| JP2008228573A (ja) | 2007-03-16 | 2008-10-02 | Orion Mach Co Ltd | 反芻動物の健康管理システム、反芻動物の健康管理方法および反芻動物の健康管理システム用首輪 |
| JP2009213515A (ja) | 2008-03-07 | 2009-09-24 | Nippon Telegr & Teleph Corp <Ntt> | 分娩兆候検知方法および分娩兆候検知システム |
| JP2010227161A (ja) | 2009-03-26 | 2010-10-14 | Wacom-It Co Ltd | 分娩通知システム |
| JP2011234668A (ja) | 2010-05-10 | 2011-11-24 | Technos Japan:Kk | 家畜の分娩・発情検知センサ、及びそれを用いた検知装置並びに検知方法 |
| WO2012014419A1 (ja) | 2010-07-30 | 2012-02-02 | パナソニック株式会社 | 発情検知装置および発情検知システム |
| JP2017051146A (ja) | 2015-09-10 | 2017-03-16 | 国立大学法人岩手大学 | 反芻動物の行動分析方法及び行動分析装置 |
| JP2017055722A (ja) | 2015-09-17 | 2017-03-23 | 広島県 | 反芻動物の分娩情報検知システムおよび分娩情報検知方法 |
-
2018
- 2018-10-09 JP JP2018191275A patent/JP7204093B2/ja active Active
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003325077A (ja) | 2002-05-14 | 2003-11-18 | Komutekku:Kk | 振動数値の解析による牛・豚、馬等の発情・分娩日時の予知、疾病の発見方法とそれに用いる装着型発情・分娩日時予知、疾病発見装置。 |
| JP2005110880A (ja) | 2003-10-06 | 2005-04-28 | Tsuken:Kk | 牛馬の分娩予兆警告装置 |
| JP2007124966A (ja) | 2005-11-04 | 2007-05-24 | Technos Japan:Kk | 動物の発情情報、出産情報及び/又は生体情報検知装置。 |
| JP2007296042A (ja) | 2006-04-28 | 2007-11-15 | Remote:Kk | 分娩予知通報システム |
| JP2007296312A (ja) | 2006-11-02 | 2007-11-15 | Remote:Kk | 分娩予知通報システムの測温/送信モジュール |
| JP2008228573A (ja) | 2007-03-16 | 2008-10-02 | Orion Mach Co Ltd | 反芻動物の健康管理システム、反芻動物の健康管理方法および反芻動物の健康管理システム用首輪 |
| JP2009213515A (ja) | 2008-03-07 | 2009-09-24 | Nippon Telegr & Teleph Corp <Ntt> | 分娩兆候検知方法および分娩兆候検知システム |
| JP2010227161A (ja) | 2009-03-26 | 2010-10-14 | Wacom-It Co Ltd | 分娩通知システム |
| JP2011234668A (ja) | 2010-05-10 | 2011-11-24 | Technos Japan:Kk | 家畜の分娩・発情検知センサ、及びそれを用いた検知装置並びに検知方法 |
| WO2012014419A1 (ja) | 2010-07-30 | 2012-02-02 | パナソニック株式会社 | 発情検知装置および発情検知システム |
| JP2017051146A (ja) | 2015-09-10 | 2017-03-16 | 国立大学法人岩手大学 | 反芻動物の行動分析方法及び行動分析装置 |
| JP2017055722A (ja) | 2015-09-17 | 2017-03-23 | 広島県 | 反芻動物の分娩情報検知システムおよび分娩情報検知方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020058277A (ja) | 2020-04-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| González et al. | Behavioral classification of data from collars containing motion sensors in grazing cattle | |
| CN109640640B (zh) | 监测牧草摄取量的系统 | |
| JP7204093B2 (ja) | 検知装置、検知方法及びプログラム | |
| EP2943146B1 (en) | Method and system for generating an oestrus attention signal for a cattle animal | |
| Guo et al. | Comparison of grazing behaviour of sheep on pasture with different sward surface heights using an inertial measurement unit sensor | |
| US20230276773A1 (en) | Systems and methods for automatic and noninvasive livestock health analysis | |
| Wang et al. | IoT-based measurement system for classifying cow behavior from tri-axial accelerometer | |
| US20210212292A1 (en) | Holding area and method executed in a holding area | |
| Borchers et al. | An evaluation of a novel device for measuring eating, rumination, and inactive behaviors in lactating Holstein dairy cattle | |
| JP6635968B2 (ja) | 行動特定装置、行動特定方法、及びプログラム | |
| JP7092624B2 (ja) | 行動特定装置、行動特定方法及びプログラム | |
| EP4402657A1 (en) | Systems and methods for the automated monitoring of animal physiological conditions and for the prediction of animal phenotypes and health outcomes | |
| EP3603388A1 (en) | Behavior specifying device, behavior specifying method and program | |
| KR102147198B1 (ko) | 등록 절차를 통해 한우 관리를 강제할 수 있는 한우 번식주기 관리 시스템 | |
| JP7037924B2 (ja) | 特定装置、特定方法、及びプログラム | |
| JP7089098B2 (ja) | 行動特定装置、行動特定方法、及びプログラム | |
| JP2022079489A (ja) | 特定装置、特定方法、及びプログラム | |
| JP6635995B2 (ja) | 行動特定装置、行動特定方法、及びプログラム | |
| JP2019170360A (ja) | 特定装置、特定方法及びプログラム | |
| AURASOPON et al. | Dynamic time warping for classifying lameness in cows | |
| WO2022075298A1 (ja) | 検知装置、検知方法及びプログラム | |
| JP6636204B2 (ja) | 行動特定装置、行動特定方法、及びプログラム | |
| JP7376255B2 (ja) | 特定装置、特定方法及びプログラム | |
| JP7376254B2 (ja) | 特定装置、特定方法及びプログラム | |
| Ruf et al. | High accuracy prediction of behaviour with slow, low-cost accelerometers in the wild boar |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211008 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20211008 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20220615 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220628 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20220824 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221027 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20221122 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20221220 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7204093 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |