JP7149713B2 - スリップ制御装置 - Google Patents
スリップ制御装置 Download PDFInfo
- Publication number
- JP7149713B2 JP7149713B2 JP2018016389A JP2018016389A JP7149713B2 JP 7149713 B2 JP7149713 B2 JP 7149713B2 JP 2018016389 A JP2018016389 A JP 2018016389A JP 2018016389 A JP2018016389 A JP 2018016389A JP 7149713 B2 JP7149713 B2 JP 7149713B2
- Authority
- JP
- Japan
- Prior art keywords
- gain
- value
- feedback
- compensation
- ratio
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Description
例えば、特許文献1では、加速時に駆動輪の角加速度の値が角加速度しきい値を超えた場合に、角加速度にフィードバックゲインを乗じた項を含むトルク指令補正値を用いて、トルク指令にフィードバック制御を行っている。

また、車速Vが高いときに車輪がスピンまたはロックすると車両挙動が乱れて危険な場合がある。
フィードバックゲイン変更部14を有し、
このフィードバックゲイン変更部14は、
車速Vがしきい値Vth(Vth_P、Vth_I、Vth_D)以下のときに、前記比例ゲインKPおよび微分ゲインKDのうち、前記フィードバック演算値KPIDの計算に用いるゲインが比例ゲインKPおよび微分ゲインKDの両方である場合は両方のゲインKP,KDまたはいずれか一方のゲインを低下させ、前記フィードバック演算値KPIDの計算に用いるゲインが比例ゲインKPおよび微分ゲインKDのいずれか一方である場合はその用いるゲインを低下させ、前記積分ゲインKIはそのまま維持させまたは低下させ、
前記各ゲインKP,KI,KDの低下前の大きさに対する低下後の大きさの割合である低下後割合αP,αI,αD、ただし低下させないゲインについては維持させた場合の割合も低下後割合αP,αI,αDと称す、について、
前記積分ゲインKIの前記低下後割合αIを最も大きくすることを特徴とする。
なお、前記「積分ゲインKIの前記低下後割合αIを最も大きくする」とは、他のいずれかのゲインKP,KDの低下後割合αP,αDと積分ゲインKIの低下後割合αIとが同じである場合を含み、後述の「〔満たすべき関係〕」で述べる事項を満足していれば良い。
前記しきい値Vthおよび許容回転速度ω′は、設計により適宜定められる。
ある車速閾値Vth以下の場合に、上記のようにゲインを低下させるが、低下前に対する低下後のゲインの大きさの割合の大小関係は、積分のゲインKIの前記低下後割合αIが最も大きくなっていれば、どんな条件でも良い。
PID制御の場合、比例ゲインKPと微分ゲインKDのどちらか一方のみを低下させてもよい。ただし、常に積分ゲインKIの前記低下後割合αIが最も大きくならなければならないため、この場合は必然的に積分ゲインKIの値は低下させない。
つまり、各ゲインKP,KI,KDの低下後割合αP,αI,αDは、以下の条件を満たす場合をすべて含む。
〔満たすべき関係〕
PID制御: αI ≧ αP かつ αI ≧ αD (αPとαDの大小関係は問わない)
PI制御: αI ≧ αP
ID制御: αI ≧ αD
ただし、
αP=KP/ KB_P、 αI=KI/ KB_I、 αD=KD I / KB_D
KB_P、KB_I、KB_D:低下前の各ゲインの大きさ(基準値)
なお、この明細書において、各ゲインにつき、特に低下の前後を区別せずに示す場合は、低下後(低下途中)と同じ「 KP、KI、KD 」の標記をしている。
Vth_I ≦ Vth_P、Vth_D
このとき、Vth_PとVth_Dの大小関係は問わず、上記3つのしきい値は全て同じ(Vth_P=Vth_I=Vth_D=Vth)でも良い。
0 km/hでの各ゲインの低下後割合をα0_P、α0_I、α0_Dとしたとき、上記αP=KP/ KB_P、αI=KI/ KB_I、αD=KD/ KB_D の関係式を満たすならば、α0_P、α0_I、α0_Dをどのように設定しても良い。
0< V0 < Vth(=Vth_P、Vth_Dのどちらか大きい方)となるようにV0を設定し、V0までα0_P、α0_I、α0_Dのいずれかもしくは複数を維持してもよい。
フィードバックゲイン変更部14Aを有し、
このフィードバックゲイン変更部14Aは、
車速Vがしきい値Vth(Vth_P、Vth_I、Vth_D)以下のときに、前記比例ゲインKPおよび微分ゲインKDのうち、前記フィードバック演算値KPIDの計算に用いるゲインが比例ゲインKPおよび微分ゲインKDの両方である場合は両方のゲインKP,KDまたはいずれか一方のゲインを低下させ、前記フィードバック演算値KPIDの計算に用いるゲインが比例ゲインKPおよび微分ゲインKDのいずれか一方である場合はその用いるゲインを低下させ、前記積分ゲインKIはそのまま維持させまたは低下させ、
前記各ゲインKP,KI,KDの低下前の大きさに対する低下後の大きさの割合である低下後割合αP,αI,αD、ただし低下させないゲインについては維持させた場合の割合も低下後割合αP,αI,αDと称す、について、
前記積分ゲインKIの前記低下後割合αIを最も大きくすることを特徴とする。
なお、ゲインを低下させる条件および方法は、第1のスリップ制御装置11と同じである。例えば、第1のスリップ制御装置11と同じく、フィードバック制御は、PID制御、PI制御、およびID制御のいずれであってもよい。前記ゲインを低下させるときに、PID制御の場合、比例ゲインKPと微分ゲインKDの両方を低下させてもよく、またどちらか一方のみを低下させてもよい。
前記しきい値Vthおよびスリップ率許容値λ′は、設計により任意に定められる値である。
低速走行時は、車輪回転速度ωの検出出力がパルスである場合に、単位時間当たりの入力パルス数が減少することなどから、車輪回転速度ωの測定精度が悪化する。そのため、車輪回転速度偏差Δω(例えば、車輪回転速度ωに所定の定数を乗じた許容回転速度ω′と車輪回転速度ωとの偏差Δωや、スリップ率偏差Δλ(スリップ率許容値λ′(上限値(>0)または下限値(≦0)とスリップ率λの偏差)の変動が大きくなる。
ここで、フィードバック制御には比例補償、積分補償、微分補償がある。
微分補償、比例補償は、車輪回転速度偏差Δωやスリップ率偏差Δλの変動によって振動的になりやすい。微分補償は車輪回転速度偏差Δωまたはスリップ率偏差Δλを微分するため振動を増幅させてしまう。比例補償も車輪回転速度偏差Δωやスリップ率偏差Δλの変動をそのまま補償値に反映させてしまう。一方積分補償は、車輪回転速度偏差Δωやスリップ率偏差Δλが変動しても振動的になり難い。積分補償は、車輪回転速度偏差Δωまたはスリップ率偏差Δλを積分するため、車輪回転速度偏差Δωやスリップ率偏差Δλの変動の影響が小さくなる。
そこで、低速走行時は振動を発生させやすい比例補償、微分補償のゲイン(それぞれ比例ゲインKP、微分ゲインKD)を低下させ、または零にして比例補償、微分補償を弱めるかもしくは無効化する。これにより、低速時に車輪回転速度ωの測定精度が悪化しても安定したスリップ制御を行うことができ、車両挙動が乱れることを防止できる。
減速時と加速時とでは、安定したスリップ制御に対する各ゲインKP,KI,KDの影響が異なるため、減速時と加速時とで前記ゲインの低下の方法を変えることが好ましい。
PID制御: αP /αI ≧ αP’/αI’ かつ αD/αI ≧ αD’/αI’
PI制御:αP /αI ≧ αP’/αI’
ID制御:αD/αI ≧ αD’/αI’
減速時は積分補償が支配的となるようにゲインKP,KI,KDを変化させることで、より安定したフィードバック制御が可能となる。
この場合に、加速時と減速時で積分ゲインKIの前記割合αIを比較した場合は、加速時の方を小さくする方がより効果的である。
また、加速時と減速時で比例補償、微分補償のゲインKP,KDの前記割合αP’、αD’を比較した場合には、減速時の方を小さくする方が効果的である。
第1の発明と同様に、以下の関係を満たすようにゲインKP,KI,KDを変更する。
PID制御: αP /αI ≧ αP’/αI’ かつ αD/αI ≧ αD’/αI’
PI制御:αP /αI ≧ αP’/αI’
ID制御:αD/αI ≧ αD’/αI’
このように、減速時は積分補償が支配的となるようにゲインKP,KI,KDを変化させることで、より安定したフィードバック制御が可能となる。
このように比例ゲインKPおよび微分ゲインKDのいずれか一方または両方を、零または零に近い値に変更することで、前記低下後割合αP(α0_P)もしくはαD(α0_D)あるいはその両方を零もしくは零に近い値としてもよい。
前記「零に近い値」は、制御上で零と見做せる値であり、設計により任意に定める。
駆動輪2を独立に制御できる車両1における前記電動機4は、インホイールモータ型であっても、オンボード型であってもよい。
駆動輪2を独立に制御できる車両1の場合、個々の駆動輪2のスリップ制御を独立に行えるため、スリップ制御の効果がより効果的となる。
この発明の第1の実施形態を図1、図2、および図13と共に説明する。図1に示すように、この実施形態は、4輪の駆動輪2に、インホイールモータ駆動装置3を構成する回転型の電動機4を備えた車両1に適用した例である。車両1は、電動機4の力行・回生によって加速と減速が可能であり、また4輪を独立して制御可能である。
インホイールモータ駆動装置3は、例えば図13に示すように、車輪用軸受5と、前記電動機4と、この電動機4の回転出力を車輪用軸受5の回転輪となるハブ輪5aに減速して伝達する減速機6とを備え、前記ハブ輪5aに駆動輪1(図1)のホイールが取付けられる。電動機4は、例えば同期モータ等の交流モータであり、ステータ4aとロータ4bとを有する。インホイールモータ駆動装置3は、車輪回転速度センサ7(図1)を備えている。車輪回転速度センサ7は、例えば磁気エンコーダと磁気センサとで構成され、車輪回転速度ωに比例したパルス間隔のパルス列を出力する。また車輪回転速度センサ7の代わりに図13のレゾルバ23の値を用いてもよい。レゾルバ23は、電動機4のロータの回転速度を検出するセンサであり、車輪回転速度に比例した値を出力する。
図2は、スリップ制御装置11の概念構成例を示す。スリップ制御装置11は、許容回転速度計算部12と、車輪回転速度偏差計算部13と、フィードバックゲイン変更部14と、制御器15と、制駆動指令値計算部16とを備える。
許容回転速度計算部12は、定められた規則により、スリップに影響する車両の因子の状態量の検出値から前記許容車輪回転速度ω′を計算する手段である。
前記許容回転速度計算部12は、前記定められた規則による計算として、例えばマップ(図示せず)等で車速V、ハンドル角δh、およびヨーレートrの検出値と許容回転速度ω′との関係を定めておき、この関係を用いて許容回転速度ω′を計算する。なお、ヨーレートrは必ずしも上記計算に用いなくてもよい。
前記許容回転速度計算部12は、この他に、車輪回転速度ωに所定の定数を乗じて許容車輪回転数ω′とする構成であってもよい。
制御器15は、比例補償、積分補償、および微分補償を行う可変の各ゲインKP、KI,KDを用いて前記車輪回転速度偏差Δωからフィードバック演算値KPIDを計算する手段である。このフィードバック演算値KPIDは、上位ECU8からスリップ制御装置11に与えられる制駆動指令と同じ単位の値であり、この例ではトルク値である。
制駆動指令値計算部16は、上位ECU8から入力された制駆動指令値を、前記フィードバック演算値KPIDに応じて変更しモータコントローラ10へ出力する手段である。この例では、上位ECU8が指令する制駆動指令値はトルク指令値であり、フィードバック演算値KPIDもトルク値である。したがってこの例では、制駆動指令値計算部16は、トルク指令値計算部である。
前記各ゲインKP,KI,KDの低下前の大きさに対する低下後の大きさの割合である低下後割合αP,αI,αD、ただし低下させないゲインについては維持させた場合の割合も低下後割合αP,αI,αDと称す、について、
前記積分ゲインKIの前記低下後割合αIを最も大きくする。
〔満たすべき関係〕
PID制御: αI ≧ αP かつ αI ≧ αD (αPとαDの大小関係は問わない。
PI制御: αI ≧ αP
ID制御: αI ≧ αD
ただし、
αP=KP/ KB_P、 αI=KI/ KB_I、 αD=KD I/ KB_D
KP、KI、KD:低下後(低下途中)の各ゲインの大きさ
KB_P、KB_I、KB_D:低下前の各ゲインの大きさ(基準値)
なお、次のように、αIがαPおよびαDよりも大きく、同じ値となる場合を除いても良い。
PID制御: αI > αP かつ αI > αD (αPとαDの大小関係は問わない。
PI制御: αI > αP
ID制御: αI > αD
αP=KP/ KB_P (2)
αI=KI / KB_I (3)
αD=KD / KB_D (4)
フィードバックゲイン変更部14は、比例ゲインKPおよび微分ゲインKDの低下後割合αP、αDの値を積分ゲインKDの低下後割合αIよりも小さくする。例えば、フィードバックゲイン変更部14は、比例補償および微分補償のゲインKP、KDを零に変更する。比例補償および微分補償のゲインKP、KDは、必ずしも零まで低下させなくてもよく、零に近い値としてもよい。比例ゲインKPおよび微分ゲインKDの低下後割合αP、αDは、別々の値であっても、互いに同じ値であってもよい。
一例を挙げると、前記フィードバックゲイン変更部14は、
・比例ゲインKP: 1000 → 0 、変化後の大きさの割合 αP:0%
・積分ゲインKI: 10 → 2 、変化後の大きさの割合 αI:20%
・微分ゲインKD: 100 → 0 、変化後の大きさの割合 αD:0%、
とする。この例ではαPとαDの両方を零にしたが、αPとαDの値がαIよりも小さければよく、αPとαDが異なる値となるようにKP、KDを変更しても良い。
PID制御: Vth_I ≦ Vth_P かつ Vth_I ≦ Vth_D
(Vth_PとVth_Dの大小関係は問わない)
PI制御: Vth_I ≦ Vth_P
ID制御: Vth_I ≦ Vth_D
フィードバックゲイン変更部14は、車両1が加速しているか減速しているかを判断する加速/減速判断部14aを有する。加速/減速判断部14aは、例えば加速度センサ(図示せず)の前後加速度信号の正負によって判断する。
低速走行時は、スリップ制御装置11に車輪回転速度ωとして入力される車輪回転速度センサ7の単位時間当たりのパルス数が減少することなどから、車輪回転速度ωの測定精度が悪化する。そのため、車輪回転速度偏差Δωの変動が大きくなる。
ここで、フィードバック制御における微分補償、および比例補償は、車輪回転速度偏差Δωの変動によって振動的になりやすい。微分補償は、車輪回転速度偏差Δωを微分するため振動を増幅させてしまう。比例補償も車輪回転速度偏差Δωの変動をそのまま補償値に反映させてしまう。一方積分補償は、車輪回転速度偏差Δωが変動しても振動的になり難い。積分補償は、車輪回転速度偏差Δωを積分するため、車輪回転速度偏差Δωの変動の影響が小さくなる。
そこで、低速走行時は、振動を発生させやすい比例補償ゲインKP,微分補償ゲインKDを低下させ、または零にして比例補償、微分補償を無効化する。これにより、低速時に車輪回転速度ωの測定精度が悪化しても安定したスリップ制御を行うことができ、車両挙動が乱れることを防止できる。
減速時は、低速まで車両が減速するまでの間に車輪回転速度偏差Δωの積分値が大きくなっている。そのため、低速走行時に車輪回転速度ωの測定値が変動しても、積分補償の値に与える影響は微小となる。したがって、加速時よりも積分ゲインKIを大きくしても、振動が発生しにくい。加速時よりも積分ゲインKIを大きくすることで、より応答性良くフィードバック制御を行うことができる。応答性良くフィードバック制御ができると、車輪のロックを防ぎ車両挙動が乱れることを防止できる。
なお、加速時と減速時のゲインの変更方法の変更は、いずれかひとつのゲインについてでもよく、変更しないゲインが合っても良い(図11参照)。
また、この実施形態は、4輪の各駆動輪2を独立に制御できる車両1に適用しており、個々の駆動輪2のスリップ制御を独立に行えるため、スリップ制御の効果がより効果的となる。
なお、作用の詳細については低下後と同様であり、第2の実施形態において説明する。
この発明の第2の実施形態につき、図3ないし図7と共に説明する。この実施形態において、特に説明する事項の他は、第1の実施形態と同様である。
この実施形態は、図1と共に前述した車両1において、スリップ制御装置11を図3に示す構成としている。
図3において、スリップ制御装置11は、スリップ率計算部21、スリップ率偏差計算部22と、フィードバックゲイン変更部14Aと、制御器15Aと、制駆動指令値計算部16Aとを備える。

制御器15Aは、各駆動輪2のスリップ率λを監視し、スリップ率λがスリップ率許容値λ′ (上限値(>0)または下限値(<0))を超えた場合に、スリップ率偏差Δλに基づくPID演算を行い、フィードバック演算値KPIDを得る。

αP=KP/ KB_P (12)
αI=KI / KB_I (13)
αD=KD / KB_D (14)
フィードバックゲイン変更部14Aは、αPとαDの値をαIよりも小さくする。例えば、フィードバックゲイン変更部14Aは、比例補償および微分補償のゲインKP、KDを零に変更する。比例補償および微分補償のゲインKP、KDは、必ずしも零まで低下させなくてもよく、零に近い値としてもよい。
一例を挙げると、前記フィードバックゲイン変更部14Aは、
・比例ゲインKP: 1000 → 0 、変化後の大きさの割合 αP:0%
・積分ゲインKI: 10 → 2 、変化後の大きさの割合 αI:20%
・微分ゲインKD: 100 → 0 、変化後の大きさの割合 αD:0%、
とする。この例ではαPとαDの両方を零にしたが、αPとαDの値がαIよりも小さければよく、αPとαDが異なる値となるようにKP、KDを変更しても良い。
トルク指令値が負の場合、すなわち回生ブレーキをかけている場合は回生ブレーキを緩め、トルク指令値が正の場合は駆動トルクを緩める。これにより、スリップ率λがスリップ率許容値λ′以下になるように前記駆動輪2のトルク指令値が制御され、駆動輪2のロックまたはスピンを抑制できる。
前述したように、制御器15Aは、積分補償と、比例補償もしくは微分補償、あるいはその両方を備える。
ここで、低速走行時は車輪回転速度ωの測定精度が悪化するため、スリップ率λの変動が大きくなる。スリップ率λの変動によってスリップ率偏差Δλにも変動が生じる。変動が生じたスリップ率偏差Δλが制御器15Aに入力されると、微分補償が最も振動の原因となりやすく、次に比例補償が振動の原因となる。一方積分補償は振動の原因となりにくい。微分補償はスリップ率偏差を微分するため振動を増幅させてしまう。比例補償はスリップ率偏差Δλの変動をそのまま補償値に反映させてしまう。一方、積分補償はスリップ率偏差を積分するため、測定値の変動の影響が小さくなる。
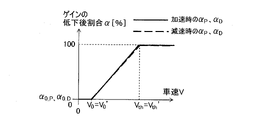
このとき、図5のように、α0_P、α0_Dの大小関係は車速によって入れ替わっても良い。積分ゲインKIは、図4と同様に常にαI≧αP、かつαI≧αDとなるように値を変化させる。図4と図5の実施例では各ゲインを線形に変化させているが、この限りではなく、αI≧αP、かつαI≧αDの関係が満たされるならば非線形に変化させても良い。また、図6のように、0<V 0<V thを設定し、V 0~V th km/hにて値を連続的に変化させ、0~ V 0km/hまではV 0km/hで設定されるαの値を維持しても良い。α0_P、α0_Dは、図7のようにα=0を維持してもよい。αは、零に限らず、零に近い値であってもよい。
また、加速/減速判断部の判断から、加速時と減速時でゲインの変化方法を切り替える。
このとき、比例ゲインKPや微分ゲインKDと同じように、車速V0km/hで積分ゲインKIを0としてはならない。積分ゲインも0にしてしまうと、スリップ制御が作動しなくなる。
αP /αI ≧ αP’/αI’ かつ αD/αI ≧ αD’/αI’ (14)
ここで、減速時の、各ゲインの低下後割合(低下前の大きさに対する低下後の割合)をそれぞれαP’、 αI’、 αD’とする。
すなわち、加速時と減速時で積分補償のゲインの前記割合を比較した場合には、減速時の方が加速時よりもゲインの前記割合を大きくする。例えば、図9のように、加速時の車速閾値Vth_Iよりも小さい値となる車速閾値Vth_I’を設定し、0~Vth_I km/hにて値を変化させる。加速時と減速時で積分補償のゲインの前記低下後割合αI、αI’を比較した場合は、同図のように加速時の方を小さくする方がより効果的である。
一方、比例補償もしくは微分補償のゲインの前記割合を比較した場合には、減速時の方が加速時よりもゲインの前記割合を小さくする。例えば図10のように、加速時の車速のしきい値V 0、V thと異なる減速時の車速のしきい値V 0’、V th’を、V 0<V 0’<V th<V th’となるように設定し、V 0’~V th’km/hにて値を連続的に変化させても良い。
加速時と減速時で比例補償、微分補償のゲインの前記低下後割合αP、αP’、αD、αD’、αI’を比較した場合には、同図のように減速時の方が小さくする方が効果的である。
ここで、図10の例では比例ゲインと微分ゲインを同時に変化させたが、別々に変化させても良い。また、図11に示すように加速時と減速時で、例えば微分ゲインのみゲインの変更方法を変えなくても良い。
上記のように加速時と減速時でゲインの変化方法を変更することで、より安定したフィードバック制御が可能となる。
3…インホイールモータ駆動装置
4…電動機
7…車輪回転速度センサ
8…上位ECU
9…各種センサ
10…モータコントローラ
11…スリップ制御装置
12…許容回転速度計算部
13…車輪回転速度偏差計算部
14、14A…フィードバックゲイン変更部
15,15A…制御器
16,16A…制駆動指令値計算部
17…車速検出手段
18…ハンドル角測定手段
19…ヨーレート測定手段
21…スリップ率計算部
22…スリップ率偏差計算部
23…レゾルバ
V…車速
r…ヨーレート
δh…ハンドル角
λ…スリップ率
λ′…スリップ率許容値
Δλ…スリップ率偏差
ω…車輪回転速度
ω′…許容回転速度
Δω…車輪回転速度偏差
KPID…フィードバック演算値
Claims (8)
- 電動機の力行・回生によって加速と減速が可能な車両に搭載され、車輪回転速度と許容車輪回転速度との偏差を算出すると共に、比例補償を行う可変の比例ゲインおよび微分補償を行う可変の微分ゲインのうちの少なくとも一方のゲインと積分補償を行う可変の積分ゲインとを用いて前記偏差からフィードバック演算値を計算し、入力された制駆動指令値を前記フィードバック演算値に応じて制御して前記電動機を駆動するスリップ制御装置であって、
フィードバックゲイン変更部を有し、
このフィードバックゲイン変更部は、
車速がしきい値以下のときに、
前記積分ゲインはそのまま維持させまたは低下させ、
前記比例ゲインおよび微分ゲインのうち、前記フィードバック演算値の計算に用いるゲインが比例ゲインおよび微分ゲインの両方である場合は両方のゲインまたはいずれか一方のゲインを低下させ、
前記フィードバック演算値の計算に用いるゲインが比例ゲインおよび微分ゲインのいずれか一方のみである場合はその用いるゲインを低下させ、
前記各ゲインの低下前の大きさに対する低下後の大きさの割合である低下後割合、ただし低下させないゲインについては維持させた場合の割合も低下後割合と称す、について、
前記積分ゲインの前記低下後割合を最も大きくする、
ことを特徴とするスリップ制御装置。 - 電動機の力行・回生によって加速と減速が可能な車両に搭載され、車輪回転速度と車速を用いて算出されるスリップ率とスリップ率許容値との偏差を算出すると共に、比例補償を行う可変の比例ゲインおよび微分補償を行う可変の微分ゲインのうちの少なくとも一方のゲインと積分補償を行う可変の積分ゲインとを用いて前記偏差からフィードバック演算値を計算し、入力された制駆動指令値を前記フィードバック演算値に応じて制御して前記電動機を駆動するスリップ制御装置であって、
フィードバックゲイン変更部を有し、
このフィードバックゲイン変更部は、
車速がしきい値以下のときに、
前記積分ゲインはそのまま維持させまたは低下させ、
前記比例ゲインおよび微分ゲインのうち、前記フィードバック演算値の計算に用いるゲインが比例ゲインおよび微分ゲインの両方である場合は両方のゲインまたはいずれか一方のゲインを低下させ、
前記フィードバック演算値の計算に用いるゲインが比例ゲインおよび微分ゲインのいずれか一方のみである場合はその用いるゲインを低下させ、
前記各ゲインの低下前の大きさに対する低下後の大きさの割合である低下後割合、ただし低下させないゲインについては維持させた場合の割合も低下後割合と称す、について、前記積分ゲインの前記低下後割合を最も大きくする、
ことを特徴とするスリップ制御装置。 - 請求項1に記載のスリップ制御装置において、前記フィードバックゲイン変更部は、車両が加速しているか減速しているかを判断し、加速時と減速時とで、前記比例ゲイン、積分ゲイン、および微分ゲインのいずれか一つまたは複数について、前記車速が前記しきい値以下のときに低下させる前記ゲインの低下の方法を変えるスリップ制御装置。
- 請求項2に記載のスリップ制御装置において、前記フィードバックゲイン変更部は、車両が加速しているか減速しているかを判断し、加速時と減速時とで、前記比例ゲイン、積分ゲイン、および微分ゲインのいずれかについて、前記車速が前記しきい値以下のときに低下させる前記ゲインの前記低下の方法を変えるスリップ制御装置。
- 請求項1または請求項3に記載のスリップ制御装置において、定められた規則によりスリップに影響する車両の因子の状態量の検出値から前記許容車輪回転速度を計算する許容回転速度計算部と、車輪回転速度と前記許容車輪回転速度との偏差を計算する車輪回転速度偏差計算部と、前記積分補償と、比例補償もしくは微分補償またはその両方を行う可変の各ゲインを用いて前記偏差から前記フィードバック演算値を計算する制御器と、入力された制駆動指令値を前記フィードバック演算値に応じて変更し前記電動機のコントローラへ出力する制駆動指令値計算部とを備え、
前記フィードバックゲイン変更部は、車両が減速しているときには、同じ車速における加速時よりも、
比例ゲインもしくは微分ゲインの前記低下後割合を積分ゲインの前記低下後割合で除した値を小さくするスリップ制御装置。 - 請求項2または請求項4に記載のスリップ制御装置において、車輪回転速度と車速を用いてスリップ率を計算するスリップ率計算部と、スリップ率とスリップ率許容値との偏差を計算するスリップ率偏差計算部と、前記積分補償と、比例補償もしくは微分補償またはその両方を行う可変の各ゲインを用いて前記偏差から前記フィードバック演算値を計算する制御器と、入力された制駆動指令値を前記フィードバック演算値に応じて変更し前記電動機のコントローラへ出力する制駆動指令値計算部とを備え、
前記フィードバックゲイン変更部は、車両が減速しているときには、同じ車速における加速時よりも、
比例ゲインもしくは微分ゲインの前記低下後割合を積分ゲインの前記低下後割合で除した値を小さくするスリップ制御装置。 - 請求項1ないし請求項6のいずれか1項に記載のスリップ制御装置において、前記フィードバックゲイン変更部は、車速が前記しきい値以下のときに、比例ゲインおよび微分ゲインのいずれか一方または両方を、零または零に近い値に変更するスリップ制御装置。
- 請求項1ないし請求項7のいずれか1項に記載のスリップ制御装置において、前記電動機は、駆動輪を独立に制御できる車両における前記駆動輪を駆動する電動機であるスリップ制御装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201810132276.3A CN109484203B (zh) | 2017-09-13 | 2018-02-09 | 滑移控制装置 |
| PCT/JP2018/033678 WO2019054382A1 (ja) | 2017-09-13 | 2018-09-11 | スリップ制御装置 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017175418 | 2017-09-13 | ||
| JP2017175418 | 2017-09-13 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019054707A JP2019054707A (ja) | 2019-04-04 |
| JP2019054707A5 JP2019054707A5 (ja) | 2021-04-15 |
| JP7149713B2 true JP7149713B2 (ja) | 2022-10-07 |
Family
ID=66013975
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018016389A Active JP7149713B2 (ja) | 2017-09-13 | 2018-02-01 | スリップ制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7149713B2 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017022870A (ja) | 2015-07-10 | 2017-01-26 | Ntn株式会社 | スリップ制御装置 |
| WO2017073184A1 (ja) | 2015-10-26 | 2017-05-04 | 三菱電機株式会社 | 車速制御装置 |
| JP2017093003A (ja) | 2015-11-02 | 2017-05-25 | Ntn株式会社 | スリップ制御装置 |
-
2018
- 2018-02-01 JP JP2018016389A patent/JP7149713B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017022870A (ja) | 2015-07-10 | 2017-01-26 | Ntn株式会社 | スリップ制御装置 |
| WO2017073184A1 (ja) | 2015-10-26 | 2017-05-04 | 三菱電機株式会社 | 車速制御装置 |
| JP2017093003A (ja) | 2015-11-02 | 2017-05-25 | Ntn株式会社 | スリップ制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019054707A (ja) | 2019-04-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10093308B2 (en) | Electronic stability control system for vehicle | |
| KR100903665B1 (ko) | 가가속도 정보를 이용한 차량의 운동 제어장치 | |
| US10967870B2 (en) | Hill descent system for vehicle and control method thereof | |
| US10933875B2 (en) | Vehicle turning control device | |
| JP5800092B2 (ja) | 制駆動力制御装置 | |
| US20190241176A1 (en) | Vehicle turning control apparatus | |
| US10099559B2 (en) | Vehicle control device of four-wheel independent drive vehicle for when one wheel is lost | |
| JP6616158B2 (ja) | スリップ制御装置 | |
| US10759282B2 (en) | Vehicle turning control device | |
| JP5801839B2 (ja) | 四輪駆動車両の駆動力配分制御装置 | |
| JP5790883B2 (ja) | 制駆動力制御装置 | |
| JP2010081720A (ja) | 車両用駆動力制御装置 | |
| JPH10295004A (ja) | 電気自動車用駆動制御装置 | |
| KR20210014821A (ko) | 차량의 휠 슬립 제어 방법 | |
| JP5359351B2 (ja) | 挙動制御装置 | |
| JP3853907B2 (ja) | 電気自動車用駆動制御装置 | |
| WO2021141018A1 (ja) | 車両の旋回制御装置 | |
| WO2019054382A1 (ja) | スリップ制御装置 | |
| JP7149713B2 (ja) | スリップ制御装置 | |
| KR20210018652A (ko) | 차량의 휠 슬립 제어 방법 | |
| CN117124868A (zh) | 制动驱动力控制装置 | |
| JP7169461B2 (ja) | 制御装置 | |
| JP2014040225A (ja) | 制駆動力制御装置 | |
| JP6679348B2 (ja) | 車両の前後速度推定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180219 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20210106 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210126 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20210208 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220111 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20220112 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220509 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220524 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220721 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220906 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220927 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7149713 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |