JP7145690B2 - コンバイン - Google Patents
コンバイン Download PDFInfo
- Publication number
- JP7145690B2 JP7145690B2 JP2018154143A JP2018154143A JP7145690B2 JP 7145690 B2 JP7145690 B2 JP 7145690B2 JP 2018154143 A JP2018154143 A JP 2018154143A JP 2018154143 A JP2018154143 A JP 2018154143A JP 7145690 B2 JP7145690 B2 JP 7145690B2
- Authority
- JP
- Japan
- Prior art keywords
- grain
- imaging target
- posture
- camera
- combine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Description
また、このような構成とすれば、カメラの向きを用途によって切り換えることが可能となる。したがって、カメラの撮像範囲を用途に応じて設定することが可能となる。
更に、このような構成とすれば、カメラを搬送車の貯留部の位置を認識に利用することができる。したがって、カメラによる貯留部の位置の認識結果を用いて適切に貯留部に穀粒を排出することが可能となる。
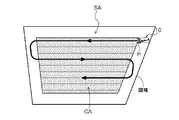
上記実施形態では、撮像対象設定部22は、穀粒排出装置17がホーム姿勢にあって、作業状態が走行状態である時は、車体11の進行方向の物体を撮像対象に設定し、穀粒排出装置17がホーム姿勢から排出姿勢への姿勢変更中である時は、穀粒を排出する搬送車CVの貯留部CVAを撮像対象に設定し、穀粒排出装置17が排出姿勢にある時は、穀粒を排出する搬送車CVの貯留部CVAに排出された穀粒を撮像対象に設定するとして説明した。撮像対象設定部22は、「穀粒排出装置17がホーム姿勢にあって、作業状態が走行状態である時」、「穀粒排出装置17がホーム姿勢から排出姿勢への姿勢変更中である時」、及び「穀粒排出装置17が排出姿勢にある時」のうちの1つ或いは2つの場合にのみ撮像対象を設定するように構成しても良い。更に、これら3つのうちの少なくとも1つと他の設定形態とを組み合わせて構成することも可能である。
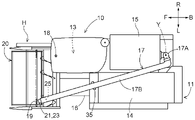
11:走行車体(機体)
15:穀粒タンク
17:穀粒排出装置
21:カメラ
22:撮像対象設定部
23:光軸変更部
CV:搬送車
CVA:貯留部
Claims (3)
- 機体と、
収穫した穀粒を貯留する穀粒タンクと、
前記穀粒の収穫中において前記機体に支持されるホーム姿勢と前記ホーム姿勢から移動し、前記穀粒タンクに貯留された穀粒を機外に排出する排出姿勢とで姿勢の変更が可能な穀粒排出装置と、
前記穀粒排出装置の先端部に設けられたカメラと、
前記機体の作業状態に応じて前記カメラの撮像対象を自動的に設定する撮像対象設定部と、
前記撮像対象設定部により設定された前記撮像対象が、前記カメラの撮像範囲に含まれるように前記カメラの光軸を自動的に変更する光軸変更部と、
を備え、
前記撮像対象設定部は、前記穀粒排出装置が前記ホーム姿勢にあって、前記作業状態が走行状態である時は、前記機体の進行方向の物体を前記撮像対象に設定するコンバイン。 - 機体と、
収穫した穀粒を貯留する穀粒タンクと、
前記穀粒の収穫中において前記機体に支持されるホーム姿勢と前記ホーム姿勢から移動し、前記穀粒タンクに貯留された穀粒を機外に排出する排出姿勢とで姿勢の変更が可能な穀粒排出装置と、
前記穀粒排出装置の先端部に設けられたカメラと、
前記機体の作業状態に応じて前記カメラの撮像対象を自動的に設定する撮像対象設定部と、
前記撮像対象設定部により設定された前記撮像対象が、前記カメラの撮像範囲に含まれるように前記カメラの光軸を自動的に変更する光軸変更部と、
を備え、
前記撮像対象設定部は、前記穀粒排出装置が前記ホーム姿勢から前記排出姿勢への姿勢変更中は、前記穀粒を排出する搬送車の貯留部を前記撮像対象に設定するコンバイン。 - 前記撮像対象設定部は、前記穀粒排出装置が前記排出姿勢にある時は、前記穀粒を排出する搬送車の貯留部に排出された前記穀粒を前記撮像対象に設定する請求項1又は2に記載のコンバイン。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018154143A JP7145690B2 (ja) | 2018-08-20 | 2018-08-20 | コンバイン |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018154143A JP7145690B2 (ja) | 2018-08-20 | 2018-08-20 | コンバイン |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020028226A JP2020028226A (ja) | 2020-02-27 |
| JP7145690B2 true JP7145690B2 (ja) | 2022-10-03 |
Family
ID=69622249
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018154143A Active JP7145690B2 (ja) | 2018-08-20 | 2018-08-20 | コンバイン |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7145690B2 (ja) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012090580A (ja) | 2010-10-27 | 2012-05-17 | Kubota Corp | コンバイン |
| US20120262568A1 (en) | 2011-04-15 | 2012-10-18 | Dirk Ruthenberg | Camera for monitoring machine functions of a vehicle and method of using the camera |
| JP2012205582A (ja) | 2011-03-30 | 2012-10-25 | Mitsubishi Agricultural Machinery Co Ltd | コンバイン |
-
2018
- 2018-08-20 JP JP2018154143A patent/JP7145690B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012090580A (ja) | 2010-10-27 | 2012-05-17 | Kubota Corp | コンバイン |
| JP2012205582A (ja) | 2011-03-30 | 2012-10-25 | Mitsubishi Agricultural Machinery Co Ltd | コンバイン |
| US20120262568A1 (en) | 2011-04-15 | 2012-10-18 | Dirk Ruthenberg | Camera for monitoring machine functions of a vehicle and method of using the camera |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020028226A (ja) | 2020-02-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7034866B2 (ja) | 収穫機 | |
| CN111343854B (zh) | 作业车、用于作业车的行驶路径选择系统以及行驶路径计算系统 | |
| JP2019216744A (ja) | コンバイン | |
| JP6755117B2 (ja) | コンバイン | |
| JP6688542B2 (ja) | 追従型コンバイン | |
| JP7014687B2 (ja) | 収穫機 | |
| JP7357444B2 (ja) | 収穫機 | |
| JP7433362B2 (ja) | 走行経路生成システム | |
| JP2021007386A (ja) | 自動走行システム | |
| JP7423666B2 (ja) | 収穫機 | |
| US20220212602A1 (en) | Harvester, System, Program, Recording Medium, and Method | |
| JP7145690B2 (ja) | コンバイン | |
| JP7149897B2 (ja) | 収穫機 | |
| JP7109300B2 (ja) | 収穫機 | |
| CN113766826A (zh) | 农用作业机、自动行驶系统、程序、记录有程序的记录介质以及方法 | |
| JP2020028224A (ja) | 圃場マップ作成システム | |
| JP7275014B2 (ja) | 収穫機 | |
| WO2022071495A1 (ja) | コンバイン、画像表示システム、画像表示方法、画像表示プログラム、及び画像表示プログラムが記録されている記録媒体 | |
| JP7466276B2 (ja) | 作業車協調システム | |
| JP7030662B2 (ja) | 収穫機 | |
| CN115334869A (zh) | 农作业机、农作业机控制程序、记录有农作业机控制程序的记录介质、农作业机控制方法 | |
| JP2022087958A (ja) | 作業車両及び作業車両制御方法 | |
| CN115361861A (zh) | 收获机、收获机的自动行驶方法、程序、记录介质、系统、农作业机、农作业机的自动行驶方法、方法、自动操舵管理系统 | |
| KR20220027811A (ko) | 자동 주행 시스템, 농작업기, 프로그램, 프로그램을 기록한 기록 매체 및 방법 | |
| WO2022118566A1 (ja) | コンバイン及び走行制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201225 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210922 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211012 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20211130 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220104 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220222 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220421 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220823 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220920 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7145690 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |