JP7067100B2 - Upper swivel - Google Patents
Upper swivel Download PDFInfo
- Publication number
- JP7067100B2 JP7067100B2 JP2018022180A JP2018022180A JP7067100B2 JP 7067100 B2 JP7067100 B2 JP 7067100B2 JP 2018022180 A JP2018022180 A JP 2018022180A JP 2018022180 A JP2018022180 A JP 2018022180A JP 7067100 B2 JP7067100 B2 JP 7067100B2
- Authority
- JP
- Japan
- Prior art keywords
- cylinder
- swivel frame
- sheave
- counterweight
- swivel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Description
本発明は、旋回フレームに対してカウンタウェイトを脱着するカウンタウェイト脱着装置に関する。 The present invention relates to a counterweight attachment / detachment device that attaches / detaches a counterweight to / from a swivel frame.
例えば特許文献1などに、旋回フレームに対してカウンタウェイトを脱着(取り付けおよび取り外し)するための装置が記載されている(特許文献1の図2などを参照)。同文献に記載の技術では、シリンダが真上向きに伸びることで、シリンダが、リンク部材を介してカウンタウェイトを上げる。
For example,
同文献に記載の技術では、カウンタウェイトを上げると、旋回フレームに対してシリンダの先端部が大きく上側に突出する。すると、カウンタウェイトを脱着するための装置と、この装置の上側に配置される物と、が互いに干渉するおそれがある。 In the technique described in the same document, when the counterweight is increased, the tip of the cylinder greatly protrudes upward with respect to the swivel frame. Then, the device for attaching / detaching the counterweight and the object arranged on the upper side of the device may interfere with each other.
そこで、本発明は、カウンタウェイト脱着装置の上側に配置される物と、カウンタウェイト脱着装置と、が互いに干渉することを抑制できる、カウンタウェイト脱着装置を提供することを目的とする。 Therefore, an object of the present invention is to provide a counterweight desorption device capable of suppressing interference between an object arranged above the counterweight desorption device and the counterweight desorption device.
カウンタウェイト脱着装置は、建設機械の旋回フレームに取り付けられる。カウンタウェイト脱着装置は、カウンタウェイトと、シリンダと、シーブと、張力部材と、を備える。前記カウンタウェイトは、前記旋回フレームに脱着される。前記シリンダは、前記旋回フレームに取り付けられ、伸縮可能である。前記シーブは、前記旋回フレームに回転自在に取り付けられる。前記張力部材は、前記シリンダおよび前記カウンタウェイトのそれぞれに接続され、前記シーブに掛けられ、前記シリンダから前記カウンタウェイトに張力により動力を伝える。前記シリンダは、前記シリンダの伸びる作動により前記張力部材を介して前記カウンタウェイトを上げる。前記シリンダの伸びる向きは、下向き、水平方向、または、水平方向に対して傾いた向きである。 The counterweight attachment / detachment device is attached to the swivel frame of the construction machine. The counterweight attachment / detachment device includes a counterweight, a cylinder, a sheave, and a tension member. The counterweight is attached to and detached from the swivel frame. The cylinder is attached to the swivel frame and can be expanded and contracted. The sheave is rotatably attached to the swivel frame. The tension member is connected to each of the cylinder and the counterweight, is hung on the sheave, and transmits power from the cylinder to the counterweight by tension. The cylinder raises the counterweight via the tension member by the extending operation of the cylinder. The extending direction of the cylinder is a downward direction, a horizontal direction, or a direction inclined with respect to the horizontal direction.
上記構成により、カウンタウェイト脱着装置の上側に配置される物と、カウンタウェイト脱着装置と、が互いに干渉することを抑制できる。 With the above configuration, it is possible to prevent the object placed above the counterweight desorption device and the counterweight desorption device from interfering with each other.
(第1実施形態)
図1~図5を参照して、第1実施形態の脱着装置40(カウンタウェイト脱着装置)を備える建設機械1について説明する。
(First Embodiment)
The
建設機械1は、図1に示すように、建設作業などの作業を行う機械であり、例えばクレーンであり、例えば移動式クレーンである。建設機械1は、下部走行体11と、上部旋回体20と、を備える。
As shown in FIG. 1, the
下部走行体11は、建設機械1を走行させる部分である。下部走行体11は、図1に示す例ではクローラ11cを備え、例えばホイールを備えてもよい。例えば、建設機械1は、クローラクレーンでもよく、ホイールクレーンでもよい。
The lower traveling
上部旋回体20は、下部走行体11よりも上側Z1に配置され、下部走行体11に対して旋回可能である。「上側Z1」などの方向の詳細は後述する。上部旋回体20は、ブーム21と、マスト23と、旋回フレーム30と、脱着装置40と、を備える。
The upper turning
ブーム21は、吊荷を吊る作業などを行う部材である。ブーム21は、旋回フレーム30に起伏可能に取り付けられる部材(起伏部材)である。例えば、ブーム21は、旋回フレーム30の前側X1端部などに取り付けられる。
The
マスト23は、例えばガイリンクおよびガイロープの少なくともいずれか(図示なし)を介して、ブーム21を後側X2から支持する。マスト23は、旋回フレーム30に起伏可能に取り付けられる起伏部材である。例えば、マスト23は、旋回フレーム30の前側X1部分などに取り付けられる。
The
旋回フレーム30は、上部旋回体20の本体部分である。旋回フレーム30は、ブーム21、マスト23、および脱着装置40などが取り付けられる構造物である。ここで、下部走行体11に対する上部旋回体20の旋回の回転軸の方向を上下方向Zとする。上下方向Zにおいて、下部走行体11から上部旋回体20に向かう側(向き)を上側Z1とし、その逆側を下側Z2とする。旋回フレーム30の長手方向を前後方向Xとする。前後方向Xにおいて、カウンタウェイト50(後述)から、旋回フレーム30へのブーム21の接続部に向かう側を、前側X1とし、その逆側を後側X2とする。上下方向Zおよび前後方向Xのそれぞれに直交する方向を、横方向Yとする。図2に示すように、旋回フレーム30は、上下方向Zから見て、長方形または略長方形などである。旋回フレーム30は、前板31と、後板33と、側板35と、旋回フレーム側ブラケット37(図3参照)と、を備える。
The
前板31は、旋回フレーム30の前側X1部分を構成する構造物であり、横方向Yに延びる。後板33は、旋回フレーム30の後側X2部分を構成する構造物であり、横方向Yに延びる。側板35・35は、旋回フレーム30の横方向Y外側の両側(左右)を構成する構造物である。側板35は、前板31と後板33とにつながれ、前後方向Xに延びる。
The
旋回フレーム側ブラケット37(図3参照)は、図1に示すカウンタウェイト50を旋回フレーム30に固定するための接続部である。なお、図1には、カウンタウェイト50が旋回フレーム30に固定されておらず、カウンタウェイト50が地面Gに置かれた状態を示す。図3に示すように、旋回フレーム側ブラケット37は、例えば、側板35から、下側Z2に突出する。旋回フレーム側ブラケット37は、ピン孔が形成されたものである。
The swivel frame side bracket 37 (see FIG. 3) is a connection portion for fixing the
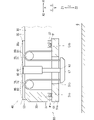
脱着装置40(カウンタウェイト脱着装置)は、旋回フレーム30に対してカウンタウェイト50を脱着(取り付けおよび取り外し)する装置(機構)である。脱着装置40は、補助クレーンを用いなくても、旋回フレーム30にカウンタウェイト50を脱着できるようにするための装置(自力脱着装置)である。上記「補助クレーン」は、建設機械1(図1参照)の組立分解用のクレーンである。脱着装置40は、旋回フレーム30に取り付けられ、旋回フレーム30の後側X2部分に取り付けられる。図2に示すように、脱着装置40は、複数設けられ、横方向Yの両側(左右)に設けられる。2つの脱着装置40・40は、横方向Yに対称に(左右対称に)設けられる。なお、脱着装置40は、1つのみ設けられてもよく、3つ以上設けられてもよい。以下では、主に、1つの脱着装置40について説明する。図3に示すように、脱着装置40は、カウンタウェイト50と、シリンダ60と、連結部材67と、シーブ70と、ロープ80(張力部材)と、を備える。
The attachment / detachment device 40 (counterweight attachment / detachment device) is a device (mechanism) for attaching / detaching (attaching / detaching) the
カウンタウェイト50は、建設機械1(図1参照)のモーメントのつり合いをとるための、おもりである。カウンタウェイト50は、旋回フレーム30の後側X2部分に取り付け可能である。カウンタウェイト50は、旋回フレーム30に対して脱着される。カウンタウェイト50は、ベースウェイト51と、ウェイト53と、を備える。
The
ベースウェイト51は、カウンタウェイト50の下側Z2部分を構成する。ベースウェイト51は、旋回フレーム30の後側X2部分よりも下側Z2に配置される。図2に示すように、ベースウェイト51は、旋回フレーム30よりも右側かつ外側(横方向Y一方の外側)から左側かつ外側(横方向Y他方の外側)にわたって連続して設けられる。図3に示すように、ベースウェイト51は、略板状のベースウェイト本体部51aと、カウンタウェイト側ブラケット51bと、孔51cと、を備える。カウンタウェイト側ブラケット51bは、カウンタウェイト50を旋回フレーム30に固定するための接続部である。カウンタウェイト側ブラケット51bは、例えば、ベースウェイト本体部51aから上側Z1に突出する。ベースウェイト51は、ピン孔が形成されたものである。孔51cは、シリンダ60および連結部材67が、ベースウェイト51に干渉しないように形成される。例えば、孔51cは、シリンダ60および連結部材67が通過可能に形成される。シリンダ60および連結部材67が、ベースウェイト51に干渉しなければ、孔51cは、設けられなくてもよい。
The
ウェイト53は、略板状である。複数のウェイト53は、ベースウェイト51の上側Z1に積み上げられる。図2に示すように、ウェイト53は、旋回フレーム30よりも右側かつ外側(横方向Y一方の外側)、および、旋回フレーム30よりも左側かつ外側(横方向Y他方の外側)のそれぞれに配置される。
The
シリンダ60は、図3および図4に示すように、伸縮(伸張および収縮)可能であり、シリンダ60の長手方向(軸方向)に伸縮可能である。図3に示すシリンダ60は、例えば油圧シリンダである。シリンダ60は、旋回フレーム30に取り付けられる。図2に示すように、例えば、シリンダ60は、旋回フレーム30の内側に配置される。上記「旋回フレーム30の内側」は、2枚の側板35・35よりも横方向Y内側、かつ、後板33よりも前側X1、かつ、前板31よりも後側X2の、旋回フレーム30に囲まれた空間(範囲)である。例えば、シリンダ60は、側板35の横方向Y内側の面に取り付けられる。例えば、シリンダ60は、後板33の前側X1の面などに取り付けられてもよい。図3に示すように、シリンダ60は、シリンダチューブ61と、シリンダロッド63と、を備える。シリンダチューブ61は、筒状の部材である。シリンダチューブ61は、旋回フレーム30に固定され、例えば側板35に固定される。シリンダロッド63は、棒状の部材である。シリンダロッド63は、シリンダチューブ61の軸方向(シリンダ60軸方向)に移動可能に、シリンダチューブ61に取り付けられる(差し込まれる)。
As shown in FIGS. 3 and 4, the
このシリンダ60が伸びるときの、シリンダチューブ61に対するシリンダロッド63の移動の向きを、「シリンダ60の伸びる向き」とする。図3および図4に示す例では、シリンダ60の伸びる向きは、真下向き(下側Z2と一致する向き)である。図3に示すシリンダ60の伸びる向きは、水平方向でもよい(図8に示すシリンダ460を参照)。上記「水平方向」は、横方向Yおよび前後方向Xの少なくともいずれかである。シリンダ60の伸びる向きは、水平方向に対して傾いた向きでもよい。水平方向に対して傾いた向きには、斜め下向き(下側Z2かつ水平方向)、および、斜め上向き(上側Z1かつ水平方向)が含まれる。シリンダ60の伸びる向きは、真上向き(上側Z1と一致する向き)ではない。
The direction of movement of the
連結部材67は、シリンダ60軸方向に直交する方向の力がシリンダ60にかかることを抑制する。連結部材67は、シリンダロッド63に固定され、例えばシリンダロッド63の先端部に固定される。連結部材67は、シリンダロッド63と、複数本(例えば2本)のロープ80・80と、を互いに連結する。以下では、1つの脱着装置40に、2本のロープ80が設けられる場合について説明する。連結部材67は、シリンダロッド63から、シリンダ60軸方向に直交する方向に突出する。連結部材67は、図3に示す例では略直線状であり、略折れ線状でもよく、略曲線状でもよい。
The connecting
シーブ70は、ロープ80の力の伝わる向きを変える滑車である。シーブ70は、旋回フレーム30に回転自在に取り付けられる。シーブ70の回転軸は、旋回フレーム30に対して固定される。旋回フレーム30を基準としたとき、シーブ70は、定滑車である。例えば、シーブ70は、旋回フレーム30の内側に配置される。例えば、シーブ70は、側板35の横方向Y内側の面に取り付けられる。シーブ70は、図3に示す例では、1つの脱着装置40に2枚設けられる。シーブ70は、前側シーブ71と、後側シーブ73と、を備える(シーブ70の配置の詳細は後述)。
The
ロープ80(張力部材)は、シリンダ60からカウンタウェイト50に、張力により動力を伝える部材である。ロープ80は、シリンダ60およびカウンタウェイト50のそれぞれに接続され、シーブ70に掛けられる。ロープ80は、連結部材67を介してシリンダロッド63に接続される。ロープ80は、ベースウェイト51に接続される。ロープ80は、例えばワイヤロープなどである。シリンダ60からカウンタウェイト50に、張力により動力を伝える「張力部材」は、ロープ80でなくてもよく、例えばチェーンでもよく、例えばベルトなどでもよい。ロープ80が2本設けられる場合、ロープ80は、例えば、前側ロープ81(前側張力部材)と、後側ロープ83(後側張力部材)と、を備える。
The rope 80 (tension member) is a member that transmits power from the
前側ロープ81は、前側シーブ71に掛けられる。例えば、前側ロープ81および前側シーブ71は、シリンダ60よりも前側X1に配置される。後側ロープ83は、後側シーブ73に掛けられる。例えば、後側ロープ83および後側シーブ73は、前側ロープ81および前側シーブ71よりも後側X2に配置され、シリンダ60よりも後側X2に配置される。
The
(シリンダ60、シーブ70、およびロープ80の配置)
シリンダ60は、シリンダ60の伸びる作動により、ロープ80を介してカウンタウェイト50を上げる(上側Z1に移動させる)。この作動が可能となるように、シリンダ60、シーブ70、およびロープ80が配置される。シリンダ60、シーブ70、およびロープ80の配置の例は次の通りである。
(Arrangement of
The
連結部材67とシーブ70との間のロープ80の配置の例は、次の通りである。ロープ80は、シリンダ60軸方向に直交する方向の力がシリンダ60にかかることを抑制できるように配置されることが好ましい。具体的には、連結部材67とシーブ70との間の複数本(例えば2本)のロープ80・80は、シリンダ60の中心軸に対して互いに回転対称(例えば線対称)に配置されることが好ましい。また、連結部材67とシーブ70との間の複数本(例えば2本)のロープ80・80のそれぞれは、シリンダ60軸方向(図3に示す例では上下方向Z)に延びることが好ましい。なお、連結部材67とシーブ70との間のロープ80は、シリンダ60軸方向に対して傾いた方向に延びてもよい。
An example of the arrangement of the
シーブ70とベースウェイト51との間のロープ80の配置の例は、次の通りである。図3に示す例では、シーブ70とベースウェイト51との間のロープ80は、上下方向Zに延びる。なお、シーブ70とベースウェイト51との間のロープ80は、上下方向Zに対して傾いた方向に延びてもよい。
An example of the arrangement of the
シーブ70の配置の例は、次の通りである。例えば、シーブ70の少なくとも一部(例えば全部)は、シリンダチューブ61の軸方向の長さ範囲L1内に配置される。長さ範囲L1は、シリンダチューブ61の軸方向における一端よりも他端側(図3では上側Z1の端よりも下側Z2)、かつ、他端よりも一端側(図3では下側Z2の端よりも上側Z1)の範囲である。この配置では、シリンダ60およびシーブ70を配置するための、シリンダ60軸方向(図3では上下方向Z)のスペースを抑制できる。
An example of the arrangement of the
例えば、図3に示すように、シーブ70の少なくとも一部(例えば全部)は、シリンダ60および連結部材67の、長さ範囲L2内に配置される。長さ範囲L2は、シリンダ60が最も縮んだときの、シリンダ60および連結部材67の、シリンダ60軸方向における一端よりも他端側(図3では上側Z1の端よりも下側Z2)、かつ、他端よりも一端側(図3では下側Z2の端よりも上側Z1)の範囲である。この配置では、シリンダ60、連結部材67、およびシーブ70を配置するための、シリンダ60軸方向におけるスペースを抑制できる。
For example, as shown in FIG. 3, at least a portion (eg, all) of the
例えば、シーブ70の少なくとも一部(例えば全部)は、シリンダチューブ61の高さ範囲H1内に配置される。高さ範囲H1は、シリンダチューブ61の上側Z1の端よりも下側Z2、かつ、シリンダチューブ61の下側Z2の端よりも上側Z1の範囲である。この配置では、シリンダ60およびシーブ70を配置するための、上下方向Zのスペースを抑制できる。
For example, at least a portion (eg, all) of the
例えば、シーブ70の少なくとも一部(例えば全部)は、シリンダ60および連結部材67の、高さ範囲H2内に配置される。高さ範囲H2は、シリンダ60が最も縮んだときの、シリンダ60および連結部材67の、上側Z1の端よりも下側Z2、かつ、下側Z2の端よりも上側Z1の範囲である。この配置では、シリンダ60、連結部材67、およびシーブ70を配置するための、上下方向Zのスペースを抑制できる。なお、シリンダ60軸方向が上下方向Zと一致する場合は、長さ範囲L1と高さ範囲H1とが一致し、長さ範囲L2と高さ範囲H2とが一致する。
For example, at least a portion (eg, all) of the
図3に示す例では、シーブ70の少なくとも一部は、連結部材67の真上に配置される。シーブ70は、ベースウェイト51の真上に配置される。
In the example shown in FIG. 3, at least a part of the
(作動)
旋回フレーム30へのカウンタウェイト50の取り付けは、次のように行われる。まず、ベースウェイト51が、旋回フレーム30の真下の地面Gに置かれる。このとき、カウンタウェイト側ブラケット51bは、旋回フレーム側ブラケット37の真下に配置される。また、ウェイト53が、ベースウェイト51の上側Z1に積み上げられる。また、ロープ80が、連結部材67に接続され、シーブ70に掛けられ、ベースウェイト51に接続される。なお、ロープ80は、旋回フレーム30へのカウンタウェイト50の取り付け作業よりも前の時点(例えば輸送時など)から、連結部材67に接続されていてもよく、シーブ70に掛けられていてもよい。
(Operation)
The
次に、図4に示すように、シリンダ60が、伸びる。シリンダ60の伸びる作動の動力は、連結部材67およびロープ80を介して、ベースウェイト51に伝わる。そして、カウンタウェイト50が、地面Gに対して持ち上げられる(上側Z1に移動する)。カウンタウェイト50が上側Z1に移動していくと、旋回フレーム側ブラケット37のピン孔とカウンタウェイト側ブラケット51bのピン孔との位置が合う。この状態で、ピンPが、各ピン孔に差し込まれる。その結果、カウンタウェイト50が、旋回フレーム30に固定される(ピン結合される)。
Next, as shown in FIG. 4, the
シリンダ60が最も伸びた状態での、脱着装置40の最も上側Z1部分(最上部)の上下方向Zにおける位置を、「脱着装置40の最上位置」とする。図4に示す例では、脱着装置40の最上位置は、シリンダチューブ61の上側Z1端部の上下方向Zにおける位置である。また、旋回フレーム30の後側X2部分(脱着装置40の近傍)の上側Z1の面を、上面30aとする。脱着装置40の最上位置は、脱着装置40の上側Z1に配置される物と、脱着装置40と、が互いに干渉しないように設定される。上記「脱着装置40の上側Z1に配置される物」は、脱着装置40よりも上側Z1、かつ、脱着装置40と上下方向Zに対向する位置に配置される物である。脱着装置40の上側Z1に配置される物は、例えばマスト23(図1参照)などである。図4に示す例では、脱着装置40の最上位置は、旋回フレーム30の上面30aよりもわずかに上側Z1の位置である。この場合、脱着装置40の最上位置は、図1に示す最も伏せた(寝かせた)状態のマスト23の下側Z2の面よりも下側Z2の位置である。なお、図4に示す脱着装置40の最上位置は、上面30aの上下方向Zにおける位置と同じ位置でもよい。脱着装置40の最上位置は、上面30aよりも下側Z2の位置でもよい。
The position in the vertical direction Z of the uppermost Z1 portion (uppermost portion) of the
次に、図5に示すように、シリンダ60が、縮む。シリンダ60が最も縮んだ状態での、シリンダ60および連結部材67の、最も下側Z2部分(最下部)の上下方向Zにおける位置を、「シリンダ60などの最下位置」とする。図5に示す例では、シリンダ60などの最下位置は、連結部材67の下側Z2端部の上下方向Zにおける位置である。シリンダ60などの最下位置は、図1に示す下部走行体11に対して上部旋回体20を旋回させたときに、脱着装置40と下部走行体11(例えばクローラ11c)とが互いに干渉しないように設定される。図5に示す例では、シリンダ60などの最下位置は、ベースウェイト51の底面(下側Z2の面)よりも上側Z1の位置である。なお、シリンダ60などの最下位置は、ベースウェイト51の底面の上下方向Zにおける位置と同じ位置でもよい。また、シリンダ60などの最下位置は、ベースウェイト51の底面よりも下側Z2の位置でもよい。
Next, as shown in FIG. 5, the
旋回フレーム30にカウンタウェイト50が固定された状態、かつ、シリンダ60が縮んだ状態(例えば最も縮んだ状態)のとき、ロープ80は、格納されてもよく、格納されなくてもよい。ロープ80は、例えば、束ねられてもよく、例えば、カウンタウェイト50や旋回フレーム30などに結び付けられてもよい。
When the
旋回フレーム30からのカウンタウェイト50の取り外しは、旋回フレーム30へのカウンタウェイト50の取り付けとは逆の手順により行われる。
The removal of the
(効果)
図3に示す脱着装置40(カウンタウェイト脱着装置)による効果は次の通りである。
(effect)
The effects of the desorption device 40 (counterweight desorption device) shown in FIG. 3 are as follows.
(第1の発明の効果)
脱着装置40は、建設機械1(図1参照)の旋回フレーム30に取り付けられる。脱着装置40は、カウンタウェイト50と、シリンダ60と、シーブ70と、ロープ80(張力部材)と、を備える。カウンタウェイト50は、旋回フレーム30に脱着される。シリンダ60は、旋回フレーム30に取り付けられ、伸縮可能である。
(Effect of the first invention)
The
[構成1-1]シーブ70は、旋回フレーム30に回転自在に取り付けられる。ロープ80は、シリンダ60およびカウンタウェイト50のそれぞれに接続され、シーブ70に掛けられ、シリンダ60からカウンタウェイト50に張力により動力を伝える。
[Structure 1-1] The
[構成1-2]シリンダ60は、シリンダ60の伸びる作動によりロープ80を介してカウンタウェイト50を上げる。シリンダ60の伸びる向きは、下向き、水平方向、または、水平方向に対して傾いた向きである。
[Structure 1-2] The
上記[構成1-1]では、シリンダ60からカウンタウェイト50に動力を伝えるために、シーブ70およびロープ80が用いられる。よって、シーブ70およびロープ80が用いられない場合に比べ、シリンダ60の配置の自由度を高くできる。よって、脱着装置40の上側Z1に配置される物と、脱着装置40と、が互いに干渉することのないように、シリンダ60を配置しやすい。よって、脱着装置40の上側Z1に配置される物と、脱着装置40と、が互いに干渉することを抑制できる。
In the above [Structure 1-1], a
上記[構成1-2]では、シリンダ60の伸びる向きは、下向き(下側Z2)、水平方向、または、水平方向に対して傾いた向きである。よって、シリンダ60の伸びる向きが真上向きである場合に比べ、カウンタウェイト50を上げたときの、シリンダロッド63の位置を、下側Z2の位置(低い位置)にできる。その結果、脱着装置40の上側Z1に配置される物と、脱着装置40と、が互いに干渉することを抑制できる。
In the above [Structure 1-2], the extending direction of the
(第2の発明の効果)
[構成2]シリンダ60の伸びる向きは、真下向き(斜め下向きを含まない下向き)である。
(Effect of the second invention)
[Structure 2] The extending direction of the
上記[構成2]により、シリンダ60の伸びる向きが水平方向または水平方向に対して傾いた方向である場合に比べ、シリンダ60を配置するための、水平方向のスペースを小さくできる。
According to the above [Structure 2], the space in the horizontal direction for arranging the
(脱着装置40の上側Z1にマスト23が配置される場合の効果)
図1に示すように、脱着装置40の真上にマスト23が配置される場合は、次の効果が得られてもよい。上記[構成1-2]により、脱着装置40でカウンタウェイト50を上げたときに、マスト23と、脱着装置40と、が互いに干渉することを抑制できる。マスト23と脱着装置40とが互いに干渉しない場合は、カウンタウェイト50を上げる際に、マスト23を最も伏せた状態よりも起こしておく必要がない。また、マスト23と脱着装置40とが互いに干渉しない場合は、マスト23の形状を特殊な形状にする必要がない。例えば、図2に示すように、マスト23の根元側(前側X1)部分から先端側(後側X2)部分にわたって、マスト23の横方向Yの幅を、一定または略一定にできる。よって、マスト23にかかるコストを低減できる。上記「特殊な形状」は、例えば、マスト23の根本側部分の横方向Yの幅に比べ、マスト23の先端側部分の横方向Yの幅が狭い形状などである。
(Effect when the
As shown in FIG. 1, when the
なお、本実施形態のマスト23の横方向Yの幅は、前側X1部分から後側X2部分までの間で、一定でなくてもよい。また、マスト23が伏せられた状態のときに、脱着装置40の真上にマスト23が配置されなくてもよい。
The width of the
(第2実施形態)
図6を参照して、第2実施形態の脱着装置240について、第1実施形態(図3などを参照)との相違点を説明する。なお、第2実施形態の脱着装置240のうち、第1実施形態との共通点については、第1実施形態と同一の符号を付すなどして、説明を省略した。共通点の説明を省略する点については、後述する他の実施形態の説明も同様である。
(Second Embodiment)
The difference between the
図3に示す例では、シリンダ60の伸びる向きは、真下向き(下側Z2と一致する向き)であった。一方、図6に示すように、本実施形態では、シリンダ260の伸びる向きは、斜め下向き(下側Z2向きかつ水平方向)である。シリンダ260の伸びる向きは、図6に示すように斜め下向きかつ前側X1向きでもよく、斜め下向きかつ後側X2向きでもよい。この場合、シリンダ260の伸びる向きが真下向きである場合(図3参照)に比べ、シリンダ260を配置するための上下方向Zのスペースを抑制できる。
In the example shown in FIG. 3, the extending direction of the
シーブ70の枚数、配置、およびロープ80の配置は、シリンダ260が伸びることでカウンタウェイト50が上がるように、適切に設定される(他の実施形態も同様)。図6に示す例では、前側ロープ81は、2枚の前側シーブ71(前側第1シーブ271a、および、前側第2シーブ271b)に掛けられる。連結部材67と前側第1シーブ271aとの間の前側ロープ81は、シリンダ60の軸方向に延び、上下方向Zに対して傾いた方向に延びる。前側第2シーブ271bとベースウェイト51との間の前側ロープ81は、上下方向Zに延びる。連結部材67と後側シーブ73との間の後側ロープ83は、シリンダ60の軸方向に延び(第1実施形態と同様)、上下方向Zに対して傾いた方向に延びる。
The number of
(第3実施形態)
図7を参照して、第3実施形態の脱着装置340について、第2実施形態(図6参照)との相違点を説明する。
(Third Embodiment)
With reference to FIG. 7, the difference between the
図6に示す例では、シリンダ260の伸びる向きは、斜め下向き(下側Z2向きかつ水平方向)であった。一方、図7に示すように、本実施形態のシリンダ360の伸びる向きは、斜め上向き(上側Z1向きかつ水平方向)である。シリンダ360の伸びる向きは、図7に示すように斜め上向きかつ後側X2向きでもよく、斜め上向きかつ前側X1向きでもよい。
In the example shown in FIG. 6, the extending direction of the
図7に示す例では、後側ロープ83は、2枚の後側シーブ73(後側第1シーブ373a、および、後側第2シーブ373b)に掛けられる。連結部材67と後側第1シーブ373aとの間の後側ロープ83は、シリンダ360の軸方向に延び、上下方向Zに対して傾いた方向に延びる。後側第2シーブ373bとベースウェイト51との間の後側ロープ83は、上下方向Zに延びる。
In the example shown in FIG. 7, the
(第4実施形態)
図8を参照して、第4実施形態の脱着装置440について、第1実施形態(図4などを参照)との相違点を説明する。
(Fourth Embodiment)
The difference between the
図4に示す例では、シリンダ60の伸びる向きは、真下向きであった。一方、図8に示すように、本実施形態のシリンダ460の伸びる向きは、斜め下および斜め上を除く水平方向である。シリンダ460の伸びる向きは、図8に示すように前向き(前側X1)でもよく、後ろ向き(後側X2)でもよく、横方向Y向きでもよく、前後方向Xおよび横方向Yのそれぞれに対して傾いた向きでもよい。
In the example shown in FIG. 4, the extending direction of the
(第5実施形態)
図9を参照して、第5実施形態の脱着装置540について、第1実施形態(図4などを参照)との相違点を説明する。相違点は、シーブ70の枚数、および、脱着装置540が動滑車590を備える点である。
(Fifth Embodiment)
With reference to FIG. 9, the difference between the
動滑車590は、カウンタウェイト50に(ベースウェイト51に)回転自在に取り付けられる。動滑車590の回転軸は、ベースウェイト51と共に移動し、例えばベースウェイト51に対して固定される。動滑車590には、ロープ80が掛けられる。動滑車590には、前側ロープ81が掛けられる前側動滑車591と、後側ロープ83が掛けられる後側動滑車593と、がある。
The moving
前側シーブ71は、例えば2枚設けられ、前側第1シーブ571aと、前側第2シーブ571bと、を備える。連結部材67と前側第1シーブ571aとの間の前側ロープ81は、シリンダ60軸方向に延び、例えば上下方向Zに延びる。前側第2シーブ571bと動滑車590との間の前側ロープ81は、上下方向Zに延びる。ロープ80の両端部のうち、連結部材67に接続された側とは反対側の端部580eは、例えば旋回フレーム30に取り付けられる(固定される)。
Two
後側シーブ73、後側ロープ83、および後側動滑車593は、前側シーブ71、前側ロープ81、および前側動滑車591に対して、例えば前後方向Xに対称に設けられる(対称に設けられなくてもよい)。後側シーブ73は、例えば2枚設けられ、後側第1シーブ573a(前側第1シーブ571aに対応)と、後側第2シーブ573b(前側第2シーブ571bに対応)と、を備える。
The
図9に示す脱着装置540による効果は、次の通りである。
The effects of the
(第3の発明の効果)
[構成3]脱着装置540は、動滑車590を備える。動滑車590は、カウンタウェイト50に回転自在に取り付けられる。動滑車590に、ロープ80が掛けられる。
(Effect of the third invention)
[Structure 3] The attachment /
上記[構成3]により、定滑車であるシーブ70のみを用いる場合に比べ、ロープ80にかかる張力を低減できる。よって、ロープ80に必要な強度を下げることができる。シリンダ60からカウンタウェイト50に、張力により動力を伝える「張力部材」がロープ80の場合は、ロープ80を細くでき、ロープ80を扱いやすくできる。
According to the above [Structure 3], the tension applied to the
(第6実施形態)
図10を参照して、第6実施形態の脱着装置640について、第5実施形態(図9参照)との相違点を説明する。相違点は、シーブ70および動滑車590それぞれの枚数、およびロープ80の掛け数である。なお、図10では、ロープ80の大部分について、中心軸(一点鎖線図参照)のみ図示した。
(Sixth Embodiment)
With reference to FIG. 10, the difference between the
図9に示す例では、1本のロープ80(例えば前側ロープ81)に掛けられる動滑車590(例えば前側動滑車591)は、1枚設けられた。一方、図10に示すように、本実施形態では、1本のロープ80(例えば前側ロープ81)に掛けられる動滑車590(例えば前側動滑車591)は、複数枚設けられる。そして、1本のロープ80は、動滑車590(例えば前側動滑車591)とシーブ70(例えば前側第2シーブ571b)とに交互に掛けられる(多本掛けにされる)。シーブ70は、多本掛けが可能となるように構成される。例えば、前側第2シーブ571bおよび後側第2シーブ573bのそれぞれは、複数枚設けられる。このように、動滑車590へのロープ80の掛け数を増やすことで、ロープ80にかかる張力をさらに低減できる。
In the example shown in FIG. 9, one moving pulley 590 (for example, front side moving pulley 591) hung on one rope 80 (for example, front rope 81) is provided. On the other hand, as shown in FIG. 10, in the present embodiment, a plurality of moving pulleys 590 (for example, front side moving pulleys 591) hung on one rope 80 (for example, front side rope 81) are provided. Then, one
(変形例)
上記実施形態は様々に変形されてもよい。例えば、互いに異なる実施形態の構成要素どうしが組み合わされてもよい。例えば、各構成要素の配置や形状が変更されてもよい。例えば、構成要素の数が変更されてもよく、構成要素の一部が設けられなくてもよい。例えば、構成要素どうしの固定や連結などは、直接的でも間接的でもよい。
(Modification example)
The above embodiment may be variously modified. For example, the components of different embodiments may be combined. For example, the arrangement and shape of each component may be changed. For example, the number of components may be changed and some of the components may not be provided. For example, fixing or connecting components may be direct or indirect.
例えば、図1に示すシリンダ60、シーブ70、ロープ80、および動滑車590(図10参照)などの配置は様々に変更されてもよい。例えば、脱着装置40の真上に、マスト23が配置されなくてもよく、マスト23以外の物が配置されてもよい。図2に示す脱着装置40は、旋回フレーム30の外側に配置されてもよい。
For example, the arrangement of the
1 建設機械
20 上部旋回体
23 マスト(脱着装置上側配置物、脱着装置上側起伏部材)
30 旋回フレーム
40、240、340、440、540、640 脱着装置(カウンタウェイト脱着装置)
50 カウンタウェイト
60、260、360、460 シリンダ
70 シーブ
80 ロープ(張力部材)
590 動滑車
1 Construction machinery
20 Upper swivel body
23 Mast (attachment on the upper side of the desorption device, undulating member on the upper side of the desorption device)
30
50
590 moving pulley
Claims (7)
前記旋回フレームに取り付けられる脱着装置と、
前記脱着装置の真上に配置される脱着装置上側配置物と、
を備え、
前記脱着装置は、
前記旋回フレームに脱着されるカウンタウェイトと、
前記旋回フレームに取り付けられ、伸縮可能なシリンダと、
前記旋回フレームに回転自在に取り付けられるシーブと、
前記シリンダおよび前記カウンタウェイトのそれぞれに接続され、前記シーブに掛けられ、前記シリンダから前記カウンタウェイトに張力により動力を伝える張力部材と、
を備え、
前記シリンダは、前記シリンダの伸びる作動により前記張力部材を介して前記カウンタウェイトを上げ、
前記シリンダの伸びる向きは、下向き、水平方向、または、水平方向に対して傾いた向きであり、
前記脱着装置上側配置物は、前記シリンダ、前記シーブ、および前記張力部材のそれぞれよりも上側、かつ、前記シリンダ、前記シーブ、および前記張力部材のそれぞれと上下方向に対向する位置に配置される、
上部旋回体。 With a swivel frame
A detachable device attached to the swivel frame and
An arrangement on the upper side of the desorption device arranged directly above the desorption device,
Equipped with
The desorption device is
The counterweight attached to and detached from the swivel frame and
A cylinder that is attached to the swivel frame and can be expanded and contracted,
A sheave that can be rotatably attached to the swivel frame,
A tension member connected to each of the cylinder and the counterweight, hung on the sheave, and transmitting power from the cylinder to the counterweight by tension.
Equipped with
The cylinder raises the counterweight via the tension member by the extension operation of the cylinder.
The extending direction of the cylinder is a downward direction, a horizontal direction, or a direction inclined with respect to the horizontal direction.
The attachment / detachment device upper arrangement is arranged above each of the cylinder, the sheave, and the tension member, and at a position facing each of the cylinder, the sheave, and the tension member in the vertical direction.
Upper swivel body .
前記旋回フレームに起伏可能に取り付けられる脱着装置上側起伏部材を備え、A detachable device upper undulating member that can be undulated and attached to the swivel frame is provided.
最も伏せた状態の前記脱着装置上側起伏部材は、前記脱着装置上側配置物である、The undulating member on the upper side of the desorption device in the most prone state is the arrangement on the upper side of the desorption device.
上部旋回体。Upper swivel body.
前記脱着装置上側起伏部材は、マストである、The undulating member on the upper side of the desorption device is a mast.
上部旋回体。Upper swivel body.
前記旋回フレームは、The swivel frame
前記旋回フレームの前側部分を構成する前板と、The front plate constituting the front side portion of the swivel frame and
前記旋回フレームの後側部分を構成する後板と、The rear plate constituting the rear portion of the swivel frame and
前記前板と前記後板とにつながれ、前記旋回フレームの横方向両側部分を構成する左右の側板と、The left and right side plates, which are connected to the front plate and the rear plate and form both lateral portions of the swivel frame,
を備え、Equipped with
前記シリンダは、前記後板よりも前側、かつ、前記前板よりも後側、かつ、前記左右の側板よりも横方向内側の、前記旋回フレームに囲まれた範囲に配置される、The cylinder is arranged in a range surrounded by the swivel frame on the front side of the rear plate, on the rear side of the front plate, and laterally inside the left and right side plates.
上部旋回体。Upper swivel body.
前記旋回フレームは、The swivel frame
前記旋回フレームの前側部分を構成する前板と、The front plate constituting the front side portion of the swivel frame and
前記旋回フレームの後側部分を構成する後板と、The rear plate constituting the rear portion of the swivel frame and
前記前板と前記後板とにつながれ、前記旋回フレームの横方向両側部分を構成する左右の側板と、The left and right side plates, which are connected to the front plate and the rear plate and form both lateral portions of the swivel frame,
を備え、Equipped with
前記シーブは、前記後板よりも前側、かつ、前記前板よりも後側、かつ、前記左右の側板よりも横方向内側の、前記旋回フレームに囲まれた範囲に配置される、The sheave is arranged in a range surrounded by the swivel frame on the front side of the rear plate, on the rear side of the front plate, and laterally inside the left and right side plates.
上部旋回体。Upper swivel body.
前記シリンダの伸びる向きは、真下向きである、
上部旋回体。 The upper swivel body according to any one of claims 1 to 5 .
The extending direction of the cylinder is directly downward.
Upper swivel body .
前記カウンタウェイトに回転自在に取り付けられ、前記張力部材が掛けられる動滑車を備える、
上部旋回体。 The upper swivel body according to any one of claims 1 to 6 .
A moving pulley that is rotatably attached to the counterweight and to which the tension member is hung.
Upper swivel body .
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018022180A JP7067100B2 (en) | 2018-02-09 | 2018-02-09 | Upper swivel |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018022180A JP7067100B2 (en) | 2018-02-09 | 2018-02-09 | Upper swivel |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019137514A JP2019137514A (en) | 2019-08-22 |
| JP7067100B2 true JP7067100B2 (en) | 2022-05-16 |
Family
ID=67694349
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018022180A Active JP7067100B2 (en) | 2018-02-09 | 2018-02-09 | Upper swivel |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7067100B2 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111217264A (en) | 2020-03-13 | 2020-06-02 | 徐工集团工程机械股份有限公司建设机械分公司 | Crane with a movable crane |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007119251A (en) | 2005-10-26 | 2007-05-17 | Liebherr Werk Ehingen Gmbh | Mobile crane loading ballast |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3708458A1 (en) * | 1987-03-16 | 1988-09-29 | Krupp Gmbh | Device for arranging a lowerable counterweight of a cantilever crane |
-
2018
- 2018-02-09 JP JP2018022180A patent/JP7067100B2/en active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007119251A (en) | 2005-10-26 | 2007-05-17 | Liebherr Werk Ehingen Gmbh | Mobile crane loading ballast |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019137514A (en) | 2019-08-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5884247B2 (en) | Movable rear balancing weight device for crawler crane | |
| JP6627850B2 (en) | Intermediate support bracket | |
| JP6834789B2 (en) | How to raise struts, and cranes | |
| CN110775811B (en) | Lifting hook device and crane | |
| JP6468447B2 (en) | Method for raising and lowering undulating member, and crane | |
| JP7275625B2 (en) | Strut backstop device | |
| JP7067100B2 (en) | Upper swivel | |
| JP6645222B2 (en) | How to attach a crane jib | |
| WO2020026842A1 (en) | Crane | |
| JP4415643B2 (en) | crane | |
| JP6787645B1 (en) | Spreader anti-vibration device | |
| JP6870484B2 (en) | Construction machinery | |
| JP6638434B2 (en) | Crane boom mounting method | |
| JP5454308B2 (en) | crane | |
| JP7298419B2 (en) | Crane assembly method and crane | |
| JP6874747B2 (en) | Upper spreader mounting device | |
| JP6607224B2 (en) | Hoisting device | |
| WO2021020291A1 (en) | Crane | |
| WO2021053863A1 (en) | Handrail device and work machine comprising same | |
| JP7375379B2 (en) | Auxiliary sheave device | |
| CN110790151B (en) | Rotary column for vehicle-mounted crane | |
| JP7447613B2 (en) | working machine | |
| JP3950332B2 (en) | How to use the counterweight attachment / detachment device | |
| JP2022120477A (en) | Derricking assist device | |
| JP5519269B2 (en) | Crane equipment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20201207 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20211110 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211116 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220117 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20220329 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20220411 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7067100 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |