[複合機1]
以下では図1及び図5を用いて、本発明の一実施形態に係る重送検知システムが備える検出部である重送検知装置100及び重送検知装置100を備える複合機1について説明する。複合機1は重送検知装置100を備えるシート状物取り扱い装置の一実施形態である。
「シート状物」は長さ方向及び幅方向に比べて厚さ方向が薄い形状の物品を指す。シート状物を構成する材料は、金属材料、樹脂材料、繊維(天然繊維及び合成繊維)その他の材料、あるいはこれらを組み合わせたものでもよい。シート状物の具体例としては紙、布、樹脂製のフィルム、金属箔、金属板、木板、樹脂板等が挙げられる。シート状物は一対のシート面を有する。「一対のシート面」はシート状物の外表面のうち、厚さ方向に垂直な一対の面を指す。シート状物が印刷用紙である場合、印刷用紙の印刷面を成す一対の面(表面及び裏面)が一対のシート面に相当する。
「シート状物取り扱い装置」は本実施形態の複合機1に限定されず、シート状物を搬送する機能を備える装置を広く含む。「シート状物取り扱い装置」の例としては、原稿及び「原稿の複製物を印刷するための印刷用紙」のうち少なくとも一方を搬送する機能を有する事務機器、紙幣を搬送する機能を有する現金自動預け払い装置(Automated Teller Machine;ATM)等が挙げられる。
上記事務機器の具体例としては、以下の(a)~(d)等が挙げられる。
(a)原稿自動送り装置(Auto Document Feeder;ADF)を備えるとともに原稿を読み取る機能及び読み取った原稿に係る情報(以下、画像情報という)を他の機器(例えば、パーソナルコンピュータ)に送信する機能を有するスキャナー。
(b)原稿を読み取る機能、画像情報を通信回線を介して他の機器に送信する機能及び他の機器から取得した画像情報をプリントアウトする機能を有するファクス。
(c)原稿を読み取る機能及び読み取った原稿に係る情報をプリントアウトする機能を備えるコピー機。
(d)上記スキャナー、ファクス及びコピー機としての機能を兼ねる複合機。
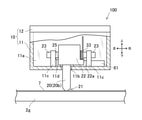
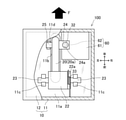
図1に示すように、複合機1は複合機本体2、原稿圧着板3、ヒンジ4・4及び検出部である重送検知装置100を備える。重送検知装置100は搬送経路2gの中途部に配設されて、搬送経路2g上を搬送される搬送物の厚さを検出する。
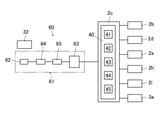
複合機本体2には後述するように本体側制御装置2cが配設される。また、図5に示すように、本体側制御装置2cは本発明の一実施形態に係る重送検知システムを構成する判定部40を備えている。判定部40は、重送検知装置100で検出した検出値に基づいて搬送物の重送状態、すなわち、「搬送経路2gに沿って予め設定された搬送方向(図1においては、上方)に搬送される搬送物」が「一枚のシート状物(本実施形態においては紙7)」であるか、それとも「複数枚(二枚以上)のシート状物が重なったもの」であるか、を判定する(図6から図10を参照)。本実施形態において、「重送」とは、複数枚のシート状物が重なった状態で搬送されることを指す。また、「搬送方向」とは、搬送経路に沿ってシート状物が搬送される方向を指す。
複合機本体2は、本体ケース2a、原稿読み取り装置2b、本体側制御装置2c、印刷装置2d、紙供給装置2e、トレイ2f、搬送経路2g、表示装置2h及び入力装置2iを備える。
本体ケース2aは複合機本体2を構成する他の部材を収容する。本実施形態の本体ケース2aは大まかに分けて上部ケース、下部ケース及びこれらを繋ぐ支柱を備える。下部ケースの上面側端部に支柱の下端部が固定され、さらに上部ケースの下面側端部に支柱の上端部が固定されることにより、下部ケースの上面から支柱の長さ分だけ上方となる位置に上部ケースが支持される。
原稿読み取り装置2bは原稿を読み取るものであり、上部ケースの上面(複合機本体2の上面)に配置される。
本体側制御装置2cは複合機1の動作を制御するものである。本実施形態の本体側制御装置2cは実体的にはROM、RAM、レジスタ及びCPU等が実装された基板からなり、本体ケース2aの上部ケースに収容される。図5に示すように、本体側制御装置2cは、重送検知装置100で検出した検出値に基づいて搬送物の重送状態を判定する判定部40を備える。判定部40は、第1演算部41、第2演算部42、第3演算部43、第1判定部44及び第2判定部45を備えている。なお、各部の具体的な処理については、重送検知方法の説明において詳述する。
第1演算部41は、重送検知装置100の検出値に基づいて、搬送物の始端部(重送検知装置100を最初に通過する側の搬送物の端部付近)における検出値の代表値である第1検出値D1を定める。第2演算部42は、重送検知装置100の検出値に基づいて、同じ搬送物の中途部(重送検知装置100を通過する搬送物の中央付近)における検出値の代表値である第2検出値D2を定める。第3演算部43は、重送検知装置100の検出値に基づいて、同じ搬送物の終端部(重送検知装置100を最後に通過する側の搬送物の端部付近)における検出値の代表値である第3検出値D3を定める。
第1判定部44は、第1検出値D1と第2検出値D2とを比較して重送状態を判定する(図6から図10を参照)。第2判定部45は、第2検出値D2と第3検出値D3とを比較して重送状態を判定する(図6から図10を参照)。
また、本体側制御装置2cにはスキャナーとしての機能に係るプログラム、ファクスとしての機能に係るプログラム、コピー機としての機能に係るプログラム等が格納され、これらのプログラムに従って原稿読み取り装置2b、印刷装置2d、紙供給装置2e等の動作の制御を行う。
図5に示すように、本体側制御装置2cは原稿読み取り装置2bに接続され、原稿読み取り装置2bの動作状況に係る情報及び原稿読み取り装置2bにより読み取られた画像情報を取得する(受信する)ことが可能であるとともに、原稿読み取り装置2bに所定の動作を行わせるための信号を送信することが可能である。本体側制御装置2cは原稿読み取り装置2bから取得した画像情報を記憶することが可能である。
本体側制御装置2cは通信回線(不図示)に接続され、本体側制御装置2cに記憶された画像情報を当該通信回線を介して他の機器に送信することが可能である。本体側制御装置2cは印刷装置2dに接続され、印刷装置2dの動作状況に係る情報を取得する(受信)ことが可能であるとともに、印刷装置2dに所定の動作を行わせるための信号を送信することが可能である。
印刷装置2dは本体側制御装置2cに記憶された画像情報に基づいて紙7(本発明に係るシート状物の一実施形態)に画像を印刷する装置である。印刷装置2dは本体ケース2aの下部ケースにおける上半部に収容される。
紙供給装置2eは複数枚の紙7・7・・・を積層した状態で収容し、かつ複数枚の紙7・7・・・を搬送物として一枚ずつ取り出す装置である。紙供給装置2eは本体ケース2aの下部ケースにおける下半部(印刷装置2dの下方となる位置)に収容される。紙供給装置2eは本体側制御装置2cに接続され、本体側制御装置2cから受信する指令信号に基づいて複数枚の紙7・7・・・を一枚ずつ取り出して搬送経路2gに紙を供給する。
トレイ2fは印刷された紙7・7・・・を受け取るものである。本実施形態のトレイ2fは本体ケース2aの下部ケースの上面に形成される。
搬送経路2gはシート状物を予め設定された搬送方向に搬送するための経路である。搬送経路搬送経路2gの具体例としては、シート状物の一方のシート面に当接する搬送面及びシート状物幅方向の一対の端面(シート状物の搬送方向に対して垂直な一対の端面)に当接する一対のガイド面を有するレール状の部材、シート状物のシート面に当接しつつ回転することによりシート状物を搬送する搬送ローラが搬送方向に並んだもの、あるいはこれらを適宜組み合わせたもの等が挙げられる。
本実施形態の場合、搬送経路2gは紙供給装置2eから取り出された紙7を印刷装置2dに向かって(複合機1の上方に)搬送し、印刷装置2dにおいて印刷された紙7をトレイ2fに向かって(複合機1の上方に)搬送する。
表示装置2hは本体側制御装置2cに接続され、本体側制御装置2cから取得した複合機1の動作状況に係る情報等を表示するものである。本実施形態の表示装置2hは液晶ディスプレイからなり、本体ケース2aの上部ケースの上面に配置される。
入力装置2iは本体側制御装置2cに接続され、作業者が複合機1に対する指示等を入力するものである。本実施形態の入力装置2iは複数のボタンからなり、本体ケース2aの上部ケースの上面に配置される。本実施形態では表示装置2hと入力装置2iとが別体であるが、例えばタッチパネルを用いることにより表示装置と入力装置とを一体としてもよい。
原稿圧着板3は複合機本体2の上面に配置された原稿読み取り装置2bの上に載置された原稿を原稿読み取り装置2bに向かって押さえつける(圧着する)ことにより、原稿読み取り装置2bが原稿を読み取る際に原稿が動く(原稿と原稿読み取り装置2bとの間の相対的な位置が変化する)ことを防止するものである。原稿圧着板3は複合機本体2の上方に配置され、ヒンジ4・4により複合機本体2に回動可能に連結される。
原稿圧着板3は原稿自動送り装置3aを備える。原稿自動送り装置3aは本体側制御装置2cに接続され、本体側制御装置2cから受信した指令信号に基づいて原稿圧着板3の上面に設けられた読取前原稿収容トレイ(不図示)に積層状態で収容された複数枚の原稿を一枚ずつ順に取り出し、原稿読み取り装置2bの上に設定された読取位置に載置し、原稿読み取り装置2bによる読み取りが終了した後に当該原稿を原稿圧着板3の上面に設けられた読取後原稿収容トレイ(不図示)に搬送する。
[重送検知装置100]
以下では、各図面を参照して、本発明に係る重送検知システムが備える検出部である重送検知装置100について説明する。本実施形態の重送検知装置100は搬送物に物理的に接触することによって測定する接触式センサの一例である。
以下の説明及び図1を除く図面においては便宜上、紙7が搬送される方向(搬送方向)を「後方」と定義することにより「前後方向」を定義し、搬送経路2gの搬送面(搬送経路2gに沿って搬送される紙7の一対のシート面に平行となる面)に対して垂直となる方向を「上下方向」と定義し、当該前後方向に対して垂直かつ搬送経路2gの搬送面に対して平行となる方向(当該前後方向及び当該上下方向に対して垂直となる方向)を「左右方向」と定義し、これら定義された方向を用いて重送検知装置100の詳細を説明する。
なお、ここで定義された方向(前後方向、上下方向及び左右方向)は重送検知装置100の使用時の姿勢を限定するものではない。すなわち、重送検知装置100の使用時の姿勢がここで定義された方向と異なる態様であってもよい。
図2から図4に示すように、重送検知装置100は主な構成要素として、ベース10、アーム20、本体部22、回動軸23、磁石32、バネ33及びセンサユニット60を備える。
ベース10は重送検知装置100の主たる構造体を成す部材である。本実施形態のベース10はベース本体11及びベースカバー12で構成される。ベース本体11は平面視で概ね正方形状に形成され、上面が開口された概ね直方体形状の箱型部材である。本実施形態のベース本体11は樹脂材料を成形することにより製造される。ベース本体11には収容室11aが形成される。収容室11aはベース本体11の内部に形成される空間である。収容室11aには重送検知装置100を構成する他の部材が収容される。
ベース本体11の底面には、アーム20を延出させるための開口溝11bが形成される。開口溝11bはベース本体11の底面における左右方向中途部において前後方向に長い長孔として形成され、収容室11aとベース本体11の外部とを連通する。ベース本体11の底面における前側には、上方に突出する二個の支持部11c・11cが左右に並んで形成される。支持部11c・11cはそれぞれ左右の回動軸23・23を支持することにより、アーム20及び本体部22を回動可能としている。
ベース本体11の底面後側における開口溝11bの左側方には、上方に突出するストッパ11dが形成される。ストッパ11dはアーム20に形成される回動規制部25と当接することにより、アーム20の回動範囲(具体的には、アーム20の回動範囲における下限位置)を規制している。
ベースカバー12は平面視で概ね正方形状に形成される板状部材であり、ベース本体11の上面の開口部を覆う部材である。本実施形態のベースカバー12は樹脂材料を成形することにより製造される。ベースカバー12は図示しない固定部材(例えば螺子など)により、ベース本体11に固定される。
図4に示すように、アーム20は側面視で略扇型に屈曲した環状の部材である。より詳細には、本実施形態のアーム20は後方に延びた棒状の上部20aと、上部20aの前端で一体となり後下方に延びた棒状の下部20bと、上部20a及び下部20bのそれぞれの後端を繋ぐ弧状部20cとで環状に形成されている。アーム20において、下部20bと弧状部20cとの接続部分の下側に形成される曲面部は当接部21を成す。
アーム20における上部20aと下部20bとの接続部分は、本体部22と一体的に連結される。本体部22はその中心軸を左右方向に向けて配置された略円筒状の部材である。換言すれば、上部20aと下部20bとの前端部がアーム20の基端部として本体部22に連結され、弧状部20cがアーム20の先端部として後方に延出されている。また、下部20bと弧状部20cとは、その中途部より下側は開口溝11bから延出される。つまり、アーム20の下部はベース本体11の外部に表出しており、当接部21はベース10の下面よりも下側に突出して形成されている。
本体部22の左右両側の底面からは、円柱状の回動軸23・23が延出されている。回動軸23・23はベース10に対するアーム20の回動軸を成す部材である。そして、回動軸23・23は前述のように、ベース本体11の底面に配置された支持部11c・11cに支持されている。つまり、アーム20及び本体部22は、回動軸23・23が支持部11c・11cに支持されることにより、図4中の矢印Sに示すようにベース本体11に対して回動可能に配置される。本実施形態の場合、アーム20がベース本体11に対し回動軸23・23を中心として回動可能に支持されたとき、回動軸23・23の軸線方向(長手方向)は左右方向に平行である。
本体部22の右端下部には、上方が平面となるように平面部22aが形成される。そして、右側の回動軸23の周囲には金属材料からなる巻きバネであるバネ33が介挿される。詳しくは、バネ33の一端部(上端部)はベース本体11の内面に当接し、バネ33の他端部(下端部)は平面部22aに当接する。そして、圧縮されたバネ33によって本体部22は右側面視で時計回りの方向に付勢される。つまり、バネ33の付勢力によって、アーム20は下方に回動する力(右側面視で時計回りに回動する力)を受けている。
アーム20における上部20aの後端部には、左側方に突出する回動規制部25が形成されている。回動規制部25は、ベース本体11の底面に配置されたストッパ11dと当接することにより、アーム20の回動範囲が規制される。つまり、アーム20はバネ33の付勢力によって下方に回動する力を受けつつ、回動規制部25がストッパ11dに当接することにより、図4に示す位置よりも下方には回動しないように構成されている。そして、アーム20が上向きの力を受けた場合は、アーム20はバネ33の付勢力に反して上方に(右側面視で反時計回りに)回動する。また、アーム20に対する上向きの力がなくなると、アーム20はバネ33の付勢力によって下方に(右側面視で時計回りに)回動し、回動規制部25とストッパ11dとが当接する位置(図4に示す位置)に戻る。
アーム20における上部20aの後端部には、右側方に突出する磁石配設部24が形成されている。磁石配設部24には上面に開口するとともに底面を有する磁石固定穴24aが形成される。
磁石32は上下一対の端面(上端面及び下端面)及び外周面を有する円柱形状の永久磁石である。「永久磁石」は、自発的に(外部から磁場あるいは電流が供給されない状態で)磁化し、周囲に磁場を発生させる(ひいては、磁力を発生させる)性質を有する物体であり、通常は強磁性体からなる。
永久磁石の具体例としては、アルニコ磁石、KS鋼、MK鋼、フェライト磁石、サマリウムコバルト磁石、ネオジム磁石等、既知の種々の磁石が挙げられる。本実施形態の磁石32はネオジム磁石からなる。本実施形態に係る磁石32は、磁石32の上端部(上端面の近傍となる部分)がN極となり、かつ磁石32の下端部(下端面の近傍となる部分)がS極となるように着磁される。
図3及び図4に示すように、磁石32はアーム20の磁石固定穴24aに押し込まれ、磁石32の下端面が磁石固定穴24aの底面に当接する位置で磁石固定穴24aから脱落不能に固定される。
図5に示すように、センサユニット60は基板61、ホール素子62、微分回路64、積分回路65及びコネクタ63を備える。
基板61は上下一対の板面及び前後左右の端面を有し、平面視長方形状の板状の部材である。本実施形態の基板61は絶縁材料(例えば、フェノール樹脂あるいはエポキシ樹脂等の絶縁性樹脂、窒化珪素あるいは窒化アルミニウム等の絶縁性セラミックス)からなり、基板61の上下一対の板面には電流経路を成す回路パターンが形成される。
ホール素子62は自己に作用する磁場(の強さ)に応じた電気信号を出力する。本実施形態のホール素子62は一対の膜面(上面及び下面)及び四つの端面(前面、後面、左側面及び右側面)を有する半導体薄膜、並びに、当該半導体薄膜の互いに対向する側端面に接続された二つの入力端子及び二つの出力端子からなる計四つの端子を備える。
ホール素子62の二つの入力端子はそれぞれホール素子62の半導体薄膜の前面及び後面に接続され、ホール素子62の二つの出力端子はそれぞれホール素子62の半導体薄膜の左側面及び右側面に接続される。ホール素子62の二つの入力端子に電圧を印加しつつホール素子62の薄膜の上面及び下面を貫通する磁場を作用させたとき、ホール効果により当該磁場の強さに応じてホール素子62の二つの出力端子の間には電位差(電圧)が生じる。
より詳細には、ホール素子62の二つの入力端子に印加される電圧(ひいては電流)が一定であるとき、ホール素子62の二つの出力端子の間に発生する電位差(電圧)はホール素子62に作用する磁束密度の大きさ(磁場の強さ)に概ね比例する。
ホール素子62はホール素子62の二つの出力端子の間に生じる電位差(電圧)を電気信号として出力する。ホール素子62はホール素子62の下面が基板61の上側の板面に対向する姿勢で基板61の上側の板面における左端部に固定される。また、ホール素子62の四つの端子ははんだ付けにより基板61に形成された回路パターンに電気的に接続される。なお、本実施形態で用いるホール素子62に代えて、磁気センサとしてMR素子のような磁気反応素子を用いることも可能である。
コネクタ63は外部の機器等とホール素子62とを接続するものである。本実施形態のコネクタ63は箱状部材と、複数の接続ピンとを備える。コネクタ63の箱状部材は樹脂材料からなり、内部空間が形成されるとともに右側面に当該内部空間と外部とを連通する開口部(コネクタ差し込み口)が形成される。コネクタ63の複数の接続ピンはコネクタ63の箱状部材の内部に配置され、複数の接続ピンの基端部はそれぞれコネクタ63の箱状部材に支持される。
コネクタ63は基板61の上側の板面における右後部に固定される。コネクタ63が基板61に固定されたとき、複数の接続ピンの基端部はそれぞれはんだ付けにより基板61に形成された回路パターン、ひいてはホール素子62の四つの端子に電気的に接続される。
微分回路64は基板61、ひいてはベース10に固定される。微分回路64はホール素子62及び積分回路65に接続され、ホール素子62が出力した電気信号の時間微分の値に応じた電圧を微分電気信号として出力する。
積分回路65は基板61、ひいてはベース10に固定される。積分回路65は微分回路64及びコネクタ63に接続され、微分回路64が出力した微分電気信号の積分値に応じた電圧を積分電気信号として出力する。
本実施形態に係る微分回路64はオペアンプ、抵抗器及びコンデンサを備える能動型微分回路であるが、これに限定されない。微分回路の他の実施例としてはRC(resistor-capacitor circuit)回路等の受動型の微分回路が挙げられる。また、センサユニット60に差動増幅回路を併せて配設する構成とすることも可能である。また、オペアンプ、抵抗器及びコンデンサ等を用いずに、マイコンを用いて微分処理(及び積分処理)をデジタル処理により行う構成とすることもできる。
図2から図4に示すように、センサユニット60をベース本体11の収容室11aに収容し、ベースカバー12をベース本体11に固定することにより、センサユニット60はベース10に固定される。これにより、ベース10に対するセンサユニット60、ひいてはホール素子62の位置及び姿勢は一定に保持される(ホール素子62はベース10に対して相対移動不可かつ相対回転不能に固定される)。
なお、本実施形態においては検出部として、アーム20が搬送物である紙7に接触する重送検知装置100、いわゆる接触式センサ(変位センサ)を用いたが、検出部の構成は本実施形態に限定されるものではない。すなわち、検出部は搬送経路2gの中途部に配設されて、搬送経路2gの上を搬送される搬送物の厚さを検出する構成であればよいため、エンコーダ式等の検出手段を用いることも可能である。
また、本実施形態に係る重送検知装置100は、微分回路64及び積分回路65をベース10に固定される構成としたが、これらをベース10の外部に設ける構成とすることも可能である。つまり、ベース10から本体側制御装置2cまでの経路上に微分回路64及び積分回路65を配設する。そして、ホール素子62の出力電圧をそのまま電気信号として外部に出力し、本体側制御装置2cまでの経路上で微分電気信号及び積分電気信号に変換する構成とすることも可能である。また、複合機本体2の本体側制御装置2cが備える判定部40に、上記のように微分及び積分の演算処理をさせる機能を付加して、ホール素子62が出力した電気信号を判定部40で微分電気信号及び積分電気信号に変換する構成とすることも可能である。
また、本実施形態において、判定部40は複合機本体2に配設される構成としているが、重送検知装置100の基板61に搭載する構成とすることも可能である。この場合、オペアンプ、抵抗器及びコンデンサ等を用いずに、重送検知装置100にマイコンを搭載することによって、微分処理及び積分処理をデジタル処理により行うことが好適である。
本実施形態の場合、一端部が本体側制御装置2cに接続された配線の他端側に他のコネクタ(不図示)を設け、当該他のコネクタをコネクタ63の箱状部材の開口部に差し込むことにより、ホール素子62がコネクタ63を経て本体側制御装置2cに接続される。ホール素子62は本体側制御装置2cからホール素子62の二つの入力端子を経てホール素子62を作動させるための電力の供給を受けるとともに、ホール素子62の二つの出力端子を経て本体側制御装置2cに電気信号(ホール素子62に作用する磁場の強さに応じた出力電圧)を送信する。
本実施形態では、センサユニット60がベース10に固定され、磁石32が固定されたアーム20がベース10に対して回動可能に支持されているとき、磁石32及びホール素子62は上下方向に並んで配置される。従って、ホール素子62は磁力線の向きが磁石32のS極(下端部)に向かう上向きの磁場(磁束)の中に配置される。そして、アーム20がベース本体11に対して回動すると、図4中の矢印aに示すように、磁石32がホール素子62に対して近接離間する。これにより、ホール素子62に作用する磁場(の強さ)が変化し、この変化に応じた電気信号がホール素子62から出力される。
以下では重送検知装置100が搬送経路2gに沿って搬送される紙7を検知するとき(検出工程S11)の挙動について説明する。図3及び図4中の矢印Fに示すように、紙7は搬送経路2gで前方から後方に向かって搬送される。また、重送検知装置100は複合機本体2の本体ケース2aにおいて、後方に紙7を搬送する搬送経路2gの中途部かつ搬送経路2gに対向する位置(本実施形態における「検知位置」)に配置される。
重送検知装置100が検知位置に固定されたとき、重送検知装置100の回動軸23・23の軸線方向(本実施形態の場合、左右方向)は搬送方向(本実施形態の場合、前後方向)に対して垂直である。
重送検知装置100が検知位置に固定されたとき、重送検知装置100の回動軸23・23の軸線方向(本実施形態の場合、左右方向)は搬送経路2gの搬送面(本実施形態の場合、紙7が搬送経路2gに沿って搬送されるときに、紙7の一対のシート面のうち下側のシート面が当接する面であり、上下方向に対して垂直な面)に対して平行である。したがって、検知位置に固定された重送検知装置100の回動軸23・23の軸線方向は搬送経路2gに沿って搬送される紙7の一対のシート面に対して平行である。
検知位置に固定された重送検知装置100のアーム20は、バネ33により当接部21が搬送経路2gに接近する方向(右側面視で時計回り)に回動するように付勢される。
そして、図4に示すように、紙7が後方(図4中の矢印Fの方向)に搬送されて、その始端部がアーム20の当接部21の下方に到達する。このとき、当接部21は紙7の上側のシート面に当接し、アーム20はバネ33の付勢力に抗して右側面視で反時計回り(本実施形態における離間方向)に回動する。その結果、アーム20に固定された磁石32は上方、すなわちホール素子62から離間する方向に移動する。
アーム20に固定された磁石32が上方に移動したとき、磁石32からホール素子62までの距離は大きくなる。その結果、磁石32に発生してホール素子62に作用する磁場は弱くなる。そして、ホール素子62は、ホール素子62に作用する磁場(の強さ)の変化に応じた電気信号を微分回路64に出力する(図9から図10を参照)。
その後、紙7がさらに後方に搬送されて、その後端部がアーム20の当接部21の下方から離脱する。このとき、当接部21は紙7の上側のシート面から離れ、アーム20はバネ33の付勢力に順じて右側面視で時計回り(本実施形態における近接方向)に回動する。その結果、アーム20に固定された磁石32は下方、すなわちホール素子62に近接する方向に移動する。
アーム20に固定された磁石32が下方に移動したとき、磁石32からホール素子62までの距離は小さくなる。その結果、磁石32に発生してホール素子62に作用する磁場は強くなる。そして、ホール素子62は、ホール素子62に作用する磁場(の強さ)の変化に応じた電気信号を微分回路64に出力する(図9から図10を参照)。
紙7が重送された場合、例えば二枚の紙7・7が重なった状態で搬送された場合も、当接部21は紙7・7の上側のシート面に当接してアーム20が回動する。そして、アーム20に固定された磁石32がホール素子62から離間する距離は、一枚の紙7が搬送される場合に比べて、紙7・7の重なり分だけ大きくなる。このため、磁石32からホール素子62までの距離は、紙7が一枚の場合より大きくなり、磁石32に発生してホール素子62に作用する磁場もより弱くなる。そして、ホール素子62は、ホール素子62に作用する磁場(の強さ)の変化に応じた、より弱い電気信号を微分回路64に出力する。
ホール素子62から電気信号が入力された微分回路64は、微分電気信号を積分回路65に出力する。微分回路64から微分電気信号が入力された積分回路65は、コネクタ63を介して積分電気信号を本体側制御装置2cの判定部40に出力する。判定部40は、ホール素子62が出力する出力電圧(詳細には、出力電圧と基準値(搬送物が搬送されていない時に出力される電圧)との差)に基づいて、搬送物が一枚のシート状物であるか、複数枚のシート状物が重なったものであるかを判定する。
より具体的には、重送検知装置100が出力した出力電圧から求めた第1検出値D1又は第3検出値D3が第2検出値D2と等しい場合には「一枚の紙7が搬送経路2gに沿って搬送されている」と判定し(重送であると判定しない)、第1検出値D1又は第3検出値D3が第2検出値D2より大きい場合には「複数枚(二枚以上)の紙7・7・・・が重なったものが搬送経路2gに沿って搬送されている」と判定する(重送であると判定する)。
本体側制御装置2cは、判定部40による判定結果に基づいて複合機1の各部の動作を制御する。例えば、判定部40で「重送である」と判定した場合、原稿読み取り装置2b、印刷装置2d、紙供給装置2e及び搬送経路2gの動作を中止し、表示装置2hに警告を表示する。
このように、本実施形態の複合機1によれば、搬送物の始端部において第1検出値D1が検出できない場合でも、搬送物の終端部において第3検出値D3が検出できれば重送状態を判定できるため、重送検知の判定精度を向上させることができる。
また、本実施形態の複合機1によれば、重送検知装置100の設置に際して寸法制約を厳しくする必要がなく、設置後の微調整を行う必要もない。さらに、重送検知装置100のアーム20が摩耗した場合でも、複合機1の電源をOFFにして再起動することにより、摩耗した状態でゼロ点リセットが行われる。これにより、検知結果を摩耗の度合に追従させることができるため、検知精度に悪影響を与えることを防止できる。
なお、本実施形態では磁石32の上端部がN極、下端部がS極となるが、本発明はこれに限定されない。磁石32の上端部がS極、下端部がN極となるように配置してもよい。言い換えれば、本発明では、磁石32からホール素子62に向かう磁力線が発生すればよい。
本実施形態ではアーム20が離間方向(右側面視で反時計回り)に回動したときには磁石32がホール素子62から離間する方向(上方)に移動する構成としたが、本発明はこれに限定されない。すなわち、アーム20が右側面視で反時計回りに回動したときには磁石32がホール素子62に近接する方向に移動してもよい。
本実施形態では、アーム20が回動したときに磁石32が移動する方向(上下方向)は、磁石32が発生させる磁場の磁力線の方向(上向き)に対して平行である。このように構成することにより「磁石32の移動距離」に対する「磁石32に発生する磁場の磁束密度の変化量」を大きくし、重送検知装置100の測定精度を向上させることが可能である。
本実施形態ではバネ33をいずれも金属材料からなる巻きバネとしたが、本発明はこれに限定されない。即ち、バネ33に代えて、樹脂材料からなる巻きバネ、樹脂材料あるいは金属材料からなる板バネ、弾性変形し得る材料(例えば、ゴム等)からなる塊状の部材、スポンジ状の樹脂材料を塊状に成形したもの、等によって本体部22及びアーム20を付勢する構成とすることもできる。また、アーム20の重量バランスを適宜調整し、アーム20の自重を付勢力として利用することにより、バネ33を省略する構成することもできる。
なお、シート状物の一方のシート面に対する当接部の追従性(シート状物が検知位置を通過するときに当接部がシート状物の一方のシート面に当接した状態を保持すること)の観点からは、本実施形態のように弾性力を発生可能な部材によりアーム20を付勢することが望ましい。
本発明の作用効果を著しく損なわない範囲であれば、回動軸23・23の軸線方向が搬送経路2gの搬送面に対して平行でなくてもよく、あるいは回動軸23・23の軸線方向が搬送方向に対して垂直でなくてもよい。
ただし、重送検知装置100の測定精度を高く保持する(より詳細には、アーム20の回動を滑らかにし、かつアーム20及びこれらを回動可能に軸支するベース10の耐久性を向上させる)という観点からは、本実施形態のように、アーム20の回動軸23・23の軸線方向(左右方向)の軸線方向を搬送経路2gの搬送面(上下方向に対して垂直な面)に対して平行とし、かつ、回動軸23・23の軸線方向を搬送方向(前後方向)に対して垂直とすることが望ましい。
[重送検知方法]
次に、本発明の一実施形態に係る重送検知方法の制御フローについて説明する。本実施形態においては、図6に示すような重送状態を例に説明する。図6は、二枚の紙7・7が前後にずれた状態で重なって構成される搬送物が搬送経路2gに沿って矢印Fの方向に搬送されている状態を示している。
図6に示すように、重送検知装置100を最初に通過する側の搬送物の端部付近の領域を始端部Aとし、同じ搬送物の中央付近を中途部Bとし、同じ搬送物の重送検知装置100を最後に通過する側の端部付近の領域を終端部Cとする。始端部A及び終端部Cは、重送状態にある搬送物において紙7が重なっていない領域であればよく、二枚の紙7・7がわずかにずれて重なった状態を考慮すると、始端部又は終端部から短い領域であることが好ましい。一方、中途部Bは、重送状態にある搬送物において紙7・7が2枚重なった領域であればよく、搬送物の中央付近であれば始端部A及び終端部Cよりも長い領域とすることができる。
図7は図6の搬送物を重送検知装置100で検出したときの理論的な検出結果を示すグラフである。図7に示すように、搬送物の始端部Aにおける検出値が第1検出値D1、中途部Bにおける検出値が第2検出値D2、終端部Cにおける検出値が第3検出値D3となっている。ここで、始端部A及び終端部Cは1枚の紙7を検出した値であるため、第1検出値D1と第3検出値D3は等しい。中途部Bは2枚重なった紙7・7を検出した値であるため、第2検出値D2は第1検出値D1及び第3検出値D3より小さくなっている。
図8は本実施形態に係る重送検知方法を示すフローチャート、図9は図6の搬送物を重送検知装置100で検出したときの実際の検出結果の一例を示すグラフ、図10は図6の搬送物を重送検知装置100で検出したときの実際の検出結果の他の例を示すグラフである。
図8に示すように、まずステップS10の搬送工程において、紙供給装置2e及び搬送経路2gによって一送目の搬送物である紙7を搬送する。
次に、ステップS11の検出工程へ進んで、搬送経路2g上を搬送される搬送物の厚さを検出部である重送検知装置100で検出する。
次に、ステップS12からステップS18を含む判定工程へ進んで、判定部40において搬送物の重送状態を判定する。この判定工程としては、まずステップS12の第1演算工程において、搬送物の始端部Aにおける検出値の代表値である第1検出値D1を定める。
第1検出値D1を定める手法は、例えば、始端部Aにおいて検出される連続した複数の検出値のばらつきが第1所定範囲内である場合に定めることを可能とし、その複数の検出値の中央値としてもよいし、その複数の検出値の平均値としてもよい。一方、始端部Aにおいて検出される連続した複数の検出値のばらつきが第1所定範囲内でない場合には、第1検出値D1を定めず、後工程において第1検出値D1はないものとして扱う。
第1所定範囲は、始端部Aにおける連続した複数の検出値がほぼ一定とみなせるような範囲とすることができる。よって、図9に示すように、始端部Aにおいて検出値のばらつきが小さい場合には第1検出値D1が定められ、図10に示すように、始端部Aにおいて検出値のばらつきが大きい場合には第1検出値D1が定められない。
なお、図10に示すように、始端部Aにおいて検出値のばらつきが大きくなる原因の一つとしては、重送検知装置100のアーム20が始端部Aに当接する際の衝撃によって跳ねることが考えられる。
ステップS12からはステップS13の第2演算工程へ進んで、搬送物の中途部Bにおける検出値の代表値である第2検出値D2を定める。第2検出値D2を定める手法は、例えば、中途部において検出される連続した複数の検出値の中央値としてもよいし、その複数の検出値の平均値としてもよい。なお、中途部Bにおいては始端部Aのように重送検知装置100のアーム20が跳ねることがないため、第2検出値D2が定められない事態は生じない。よって、図9又は図10に示すように、中途部Bにおいて第2検出値D2が定められる。
ステップS13からはステップS14へ進んで、第1判定部44は第1検出値D1が定められているか否かを判別する。そして、第1検出値D1が定められている場合にはステップS15へ進み、第1検出値D1が定められていない場合にはステップS16へ進む。
ステップS15の第1判定工程においては、第1判定部44が第1検出値D1と第2検出値D2とを比較して重送状態を判定する。具体的には、第1検出値D1が第2検出値D2より大きい場合、重送であると判定し、第1検出値D1と第2検出値D2が等しい場合、重送でないと判定する。ここでいう等しいとは、完全に一致する値だけでなく、検出精度によって生じるばらつきを考慮したほぼ等しい値も含むものとする。よって、図9に示すように、第1検出値D1が第2検出値D2より大きい場合、重送であると判定する。
ステップS16の第3演算工程においては、搬送物の終端部Cにおける検出値の代表値である第3検出値D3を定める。
第3検出値D3を定める手法は、例えば、終端部Cにおいて検出される連続した複数の検出値のばらつきが第2所定範囲内である場合に定めることが可能とし、その複数の検出値の中央値としてもよいし、その複数の検出値の平均値としてもよい。第2所定範囲は、第1所定範囲と同じ長さとすることができる。なお、第2所定範囲と第1所定範囲とは異なる長さであってもよい。終端部Cにおいては、図6に示すように、重送検知装置100のアーム20がなだらかに下った後に位置するため、アーム20が跳ねて第3検出値D3が定められない可能性は低い。
ステップS16からはステップS17へ進んで、第2判定部45は第3検出値D3が定められているか否かを判別する。そして、第3検出値D3が定められている場合にはステップS18へ進み、第3検出値D3が定められていない場合にはステップS10に戻る。
ステップS18の第2判定工程においては、第2判定部45が第3検出値D3と第2検出値D2とを比較して重送状態を判定する。具体的には、第3検出値D3が第2検出値D2より大きい場合、重送であると判定し、第3検出値D3と第2検出値D2が等しい場合、重送でないと判定する。ここでいう等しいとは、上記と同様に、完全に一致する値だけでなく、検出精度によって生じるばらつきを考慮したほぼ等しい値も含むものとする。よって、図9又は図10に示すように、第3検出値D3が第2検出値D2より大きい場合、重送であると判定する。
ステップS18からはステップS10に戻り、次の搬送物について同様の処理を実行する。
このように、本実施形態の重送検知方法によれば、図10に示すように、第1検出値D1が検出できないために第1判定工程を実行できない場合でも、第2判定工程において重送状態を判定できるため、重送検知の判定精度を向上させることができる。
なお、上述したステップS12からステップS18の判定工程における各ステップの順序は、処理可能な順序であれば適宜組み替えることができる。例えば、ステップS12、ステップS13、ステップS16、ステップS14、ステップS15、ステップS17、ステップS18の順にすることも可能である。
また、ステップS15の第1判定工程において重送であると判定された場合には、ステップS16からステップS18を実行せずにステップS10に戻るようにしてもよい。これにより、判定部40は重送であることを早く出力することができる。