JP6976096B2 - コンテナ把持装置 - Google Patents
コンテナ把持装置 Download PDFInfo
- Publication number
- JP6976096B2 JP6976096B2 JP2017144065A JP2017144065A JP6976096B2 JP 6976096 B2 JP6976096 B2 JP 6976096B2 JP 2017144065 A JP2017144065 A JP 2017144065A JP 2017144065 A JP2017144065 A JP 2017144065A JP 6976096 B2 JP6976096 B2 JP 6976096B2
- Authority
- JP
- Japan
- Prior art keywords
- arm
- container
- grip portion
- moving member
- gripping
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Landscapes
- Manipulator (AREA)
- Load-Engaging Elements For Cranes (AREA)
Description
ガイド部材を有する支持部材と、
支持部材に取り付けられて、該支持部材に対して移動可能な移動部材と、
移動部材の一方の側面に取り付けられた第1アームと、
移動部材において、第1アームと逆側に取り付けられた第2アームと、
第1アームの先端に取り付けられた第1把持部と、
第2アームの先端に取り付けられた第2把持部と、を備え、
移動部材は、ガイド部材と嵌合する受け部材を有し、移動部材が支持部材に対して移動する際に、ガイド部材と受け部材とは嵌合状態を維持し、
移動部材が所定の固定位置にある場合には、第1把持部は第1アームに対して第1所定角度となり、第2把持部は第2アームに対して第2所定角度となり、
第1所定角度および第2所定角度のそれぞれは、コンテナの平面方向に対する側面の角度に略一致し、第1把持部および第2把持部のそれぞれは、コンテナの両側面を把持でき、
前記移動部材は、第1方向に移動することで前記固定位置に移動し、
前記移動部材は、
前記ガイド部材と前記受け部材との嵌合をもって移動する位置決め部材と、
前記位置決め部材の移動を行うピストンと、
を、有し、
前記ピストンの前記第1方向への移動によって前記位置決め部材が前記第1方向に移動し、前記固定位置において、前記位置決め部材が固定された状態を維持できる。
ガイド部材を有する支持部材と、
支持部材に取り付けられて、該支持部材に対して移動可能な移動部材と、
移動部材の一方の側面に取り付けられた第1アームと、
移動部材において、第1アームと逆側に取り付けられた第2アームと、
第1アームの先端に取り付けられた第1把持部と、
第2アームの先端に取り付けられた第2把持部と、を備え、
移動部材は、ガイド部材と嵌合する受け部材を有し、移動部材が支持部材に対して移動する際に、ガイド部材と受け部材とは嵌合状態を維持し、
移動部材が所定の固定位置にある場合には、第1把持部は第1アームに対して第1所定角度となり、第2把持部は第2アームに対して第2所定角度となり、
第1所定角度および第2所定角度のそれぞれは、コンテナの平面方向に対する側面の角度に略一致し、第1把持部および第2把持部のそれぞれは、コンテナの両側面を把持できる。
第1把持部および第2把持部のそれぞれは、コンテナの両側面に接触して、移動部材から付与される力をコンテナに与えて把持する。
ガイド部材と受け部材との嵌合によって、固定位置において、移動部材の位置が固定されると共に第1アームおよび第2アームが固定される。
第2アームが第1方向に移動するに従い、第2アームと第2把持部との交差角度は縮小して、第2所定角度に近づく。
ガイド部材と受け部材との嵌合をもって移動する位置決め部材と、
位置決め部材の移動を行うピストンと、
を、有し、
ピストンの第1方向への移動によって位置決め部材が第1方向に移動し、固定位置において、位置決め部材が固定された状態を維持できる。
第1アームと第1把持部とは、第1所定角度の交差角度を維持でき、
第2アームと第2把持部とは、第2所定角度の交差角度を維持でき、
移動部材を基準として、第1把持部までの距離と第2把持部までの距離が維持される。
第2把持部は、第2アームと回動可能に接続される第2サブアームと、当該第2サブアームと回動可能に接続される第2把持爪と、を有する。
第1アームおよび第2アームは、略垂直方向において、その交差角度を変化させる。
本発明のコンテナ用把持装置が把持対象とするコンテナについて説明する。図1は、本発明のコンテナ用把持装置の斜視図である。コンテナ100は、図1のように内部に物品を収容可能であって、種類によって同一形状や同一の大きさを有する。もちろん、コンテナ100の種類が変われば、形状や大きさは変化する。
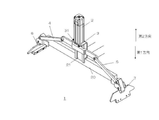
コンテナ用把持装置の全体概要について説明する。図2は、本発明の実施の形態1におけるコンテナ用把持装置の斜視図である。図2は、後述する移動部材3が上部に位置して、コンテナ100を把持する前の状態を示している。
次に、コンテナ用把持装置1の動作について説明する。
まず、コンテナ用把持装置1は、図5の状態となっている。コンテナ100が設置されており、このコンテナ100を把持する準備状態となっている。例えば、コンテナ100が、製造ラインや箱詰めラインに設置されている。コンテナ用把持装置1は、設置されているコンテナ100を把持する位置に設置されている。
次に、支持部材2に対して移動部材3が第1方向に移動を開始する。図6の状態である。図6では、移動部材3が下降する。移動部材3が第1方向に移動するのに合わせて、第1アーム4と第2アーム5の支点も第1方向に移動する。この移動部材3の移動においては、移動部材3の受け部材31は、支持部材2のガイド部材21と嵌合した状態を維持する。
図7は、移動部材3が固定位置に到達した状態を示している。移動部材3が第1方向に移動して、所定の固定位置に到達する。所定の固定位置は、第1把持部6と第2把持部7とがコンテナ100を把持できる状態となる位置である。固定位置は、コンテナ100の形状、コンテナ用把持装置1の構成などによって定められれば良い。例えば、第1アーム4と第2アーム5との交差角度が略180度、すなわち、これらが略平行となる状態であればよい。
図7を用いて上述したように、移動部材3は、支持部材2に対して第1方向(図7では、下降方向)に移動して、固定位置に到達する。移動部材3の第1方向に移動させる駆動機構が移動力を付与し続けている限り、ガイド部材21と受け部材31との嵌合によって、移動部材3は固定位置で固定される。
図8は、本発明の実施の形態2におけるコンテナ用把持装置の斜視図である。コンテナ用把持装置1の移動部材3の部分にフォーカスした状態を示している。図3などと同じ要素については、符号を省略している。
第1アーム4と第2アーム5のそれぞれの長さが可変であることも好適である。第1アーム4と第2アーム5の長さは、コンテナ100の幅に対応する。コンテナ100は、規格によりその幅が一定であることが多いが、種類や製造者が変わることで、その幅も変化することがある。
ガイド部材21は、受け部材31と嵌合する。この嵌合によって、支持部材2と移動部材3との相対的な位置関係が維持される。また、固定位置での固定も維持される。
図10は、本発明の実施の形態2におけるコンテナ用把持装置の斜視図である。
図3などを用いた説明では、支持部材2および移動部材3が垂直方向である場合を例として説明した。このため、第1方向は下降方向であり、第2方向は上昇方向である。この昇降によって、第1把持部6と第2把持部7とが、コンテナ100の両側面を把持することができる構成となっている。
図11は、本発明の実施の形態2における複数コンテナを把持できるコンテナ用把持装置の斜視図である。図11に示されるコンテナ用把持装置1は、2個のコンテナ100を同時に把持できる構成を有している。フレーム11に2つのコンテナ用把持装置の各要素が組み合わされている。
11 フレーム
2 支持部材
20 フレーム
21 ガイド部材
3 移動部材
31 受け部材
32 位置決め部材
33 ピストン
4 第1アーム
5 第2アーム
6 第1把持部
61 第1サブアーム
62 第1把持爪
63 突起
7 第2把持部
71 第2サブアーム
72 第2把持爪
73 突起
100 コンテナ
Claims (15)
- コンテナを把持するコンテナ用把持装置であって、
ガイド部材を有する支持部材と、
前記支持部材に取り付けられて、該支持部材に対して移動可能な移動部材と、
前記移動部材の一方の側面に取り付けられた第1アームと、
前記移動部材において、前記第1アームと逆側に取り付けられた第2アームと、
前記第1アームの先端に取り付けられた第1把持部と、
前記第2アームの先端に取り付けられた第2把持部と、を備え、
前記移動部材は、前記ガイド部材と嵌合する受け部材を有し、前記移動部材が前記支持部材に対して移動する際に、前記ガイド部材と前記受け部材とは嵌合状態を維持し、
前記移動部材が所定の固定位置にある場合には、前記第1把持部は前記第1アームに対して第1所定角度となり、前記第2把持部は前記第2アームに対して第2所定角度となり、
前記第1所定角度および前記第2所定角度のそれぞれは、前記コンテナの平面方向に対する側面の角度に略一致し、前記第1把持部および前記第2把持部のそれぞれは、前記コンテナの両側面を把持でき、
前記移動部材は、第1方向に移動することで前記固定位置に移動し、
前記移動部材は、
前記ガイド部材と前記受け部材との嵌合をもって移動する位置決め部材と、
前記位置決め部材の移動を行うピストンと、
を、有し、
前記ピストンの前記第1方向への移動によって前記位置決め部材が前記第1方向に移動し、前記固定位置において、前記位置決め部材が固定された状態を維持できる、コンテナ用把持装置。 - 前記移動部材は、前記第1アームを介して前記第1把持部に力を付与し、前記第2アームを介して前記第2把持部に力を付与し、
前記第1把持部および前記第2把持部のそれぞれは、前記コンテナの両側面に接触して、前記移動部材から付与される力を前記コンテナに与えて把持する、請求項1記載のコンテナ用把持装置。 - 前記ガイド部材と前記受け部材との嵌合によって、前記固定位置において、前記移動部材の位置が固定されると共に前記第1アームおよび前記第2アームが固定される、請求項1または2記載のコンテナ用把持装置。
- 前記移動部材は、前記第1方向に移動するに従い前記第1アームおよび前記第2アームの交差角度を拡大させ、前記第1方向と逆の第2方向に移動するに従い、前記第1アームおよび前記第2アームの交差角度を縮小させる、請求項1から3のいずれか記載のコンテナ用把持装置。
- 前記第1アームが前記第1方向に移動するに従い、前記第1アームと前記第1把持部との交差角度は縮小して前記第1所定角度に近づき、
前記第2アームが前記第1方向に移動するに従い、前記第2アームと前記第2把持部との交差角度は縮小して、前記第2所定角度に近づく、請求項4記載のコンテナ用把持装置。 - 前記移動部材が前記固定位置にある場合には、
前記第1アームと前記第1把持部とは、前記第1所定角度の交差角度を維持でき、
前記第2アームと前記第2把持部とは、前記第2所定角度の交差角度を維持でき、
前記移動部材を基準として、前記第1把持部までの距離と前記第2把持部までの距離が維持される、請求項1から5のいずれか記載のコンテナ用把持装置。 - 前記第1把持部および前記第2把持部は、前記移動部材が固定される力のみで、前記コンテナへの把持力を生じさせる、請求項6記載のコンテナ用把持装置。
- 前記移動部材を基準として、前記第1把持部までの距離と前記第2把持部までの距離が維持されることで、前記移動部材を基準として、把持されている前記コンテナは水平方向に揺れない、請求項6記載のコンテナ用把持装置。
- 前記第1所定角度および前記第2所定角度のそれぞれは、略90度である、請求項1から8のいずれか記載のコンテナ用把持装置。
- 前記移動部材が前記固定位置にある場合には、前記第1アームと前記第2アームとは略平行となる、請求項1から9のいずれか記載のコンテナ用把持装置。
- 前記第1アームおよび前記第2アームのそれぞれの長さが可変である、請求項1から10のいずれか記載のコンテナ用把持装置。
- 前記ガイド部材は凹状であって、前記凸状の幅は、固定位置における幅がそれ以外における幅よりも小さい、請求項1から11のいずれか記載のコンテナ用把持装置。
- 前記第1把持部は、前記第1アームと回動可能に接続される第1サブアームと、当該第1サブアームと回動可能に接続される第1把持爪と、を有し、
前記第2把持部は、前記第2アームと回動可能に接続される第2サブアームと、当該第2サブアームと回動可能に接続される第2把持爪と、を有する、請求項1から12のいずれか記載のコンテナ用把持装置。 - 前記移動部材は、前記支持部材の設置角度に基づき、種々の角度で移動できる、請求項1から13のいずれか記載のコンテナ用把持装置。
- 前記移動部材は、前記支持部材の設置角度に基づいて、略水平方向に移動し、
前記第1アームおよび前記第2アームは、略垂直方向において、その交差角度を変化させる、請求項1から14のいずれか記載のコンテナ用把持装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017144065A JP6976096B2 (ja) | 2017-07-26 | 2017-07-26 | コンテナ把持装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017144065A JP6976096B2 (ja) | 2017-07-26 | 2017-07-26 | コンテナ把持装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019026394A JP2019026394A (ja) | 2019-02-21 |
| JP6976096B2 true JP6976096B2 (ja) | 2021-12-08 |
Family
ID=65475597
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017144065A Active JP6976096B2 (ja) | 2017-07-26 | 2017-07-26 | コンテナ把持装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6976096B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7319668B2 (ja) * | 2019-10-29 | 2023-08-02 | 株式会社ナベル | コンテナ移送装置 |
| KR102533554B1 (ko) * | 2022-10-31 | 2023-05-16 | (주)대우건설 | 강재 몰드 운반 배치용 그립 모듈 |
-
2017
- 2017-07-26 JP JP2017144065A patent/JP6976096B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019026394A (ja) | 2019-02-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8240973B2 (en) | Palletizing robot | |
| US11407107B2 (en) | Palletizing boxes | |
| JP7186546B2 (ja) | 移載装置 | |
| US20170050314A1 (en) | Industrial robot | |
| KR102137192B1 (ko) | 식품의 투입 장치 | |
| US5516255A (en) | Clamping apparatus | |
| JPH0611618B2 (ja) | 物品のパレタイジング装置 | |
| WO2018066642A1 (ja) | 食品の保持装置 | |
| US11702297B2 (en) | Transfer method to drag grip target object | |
| KR102199924B1 (ko) | 평판 형태의 물품을 정렬하는 정렬 장치 | |
| JP6976096B2 (ja) | コンテナ把持装置 | |
| WO2018155690A1 (ja) | 箱詰め装置及び箱詰め方法 | |
| JP2019210038A (ja) | 箱組立ておよび梱包システム並びにそのシステム用コントローラ | |
| US20230109294A1 (en) | Robot carriage tray table | |
| US20050220599A1 (en) | Clamshell and fork-style material handling apparatus | |
| CN113165171A (zh) | 包括铰接臂的机器人系统 | |
| KR101480346B1 (ko) | 평행링크 구조를 갖는 수직 다관절 로봇의 중력 보상 장치 | |
| CN206544181U (zh) | 用于至少两个并联运动机械手的彼此协调控制的设施 | |
| JPS61257829A (ja) | 物品パレタイジング用ロボツトシステム | |
| US20230107488A1 (en) | Stack containment structure | |
| JP6056707B2 (ja) | 物品移載装置及び搬送設備 | |
| KR20190123779A (ko) | 식품 유지 장치와 그 동작 방법 | |
| JP6157127B2 (ja) | 物品移動装置 | |
| JPH085961Y2 (ja) | 物品パレタイジング用ロボットシステム | |
| KR102709380B1 (ko) | 상자들을 팔레타이징하기 위한 로봇 및 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200414 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210219 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210330 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210407 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20211102 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20211109 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6976096 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |