JP6943883B2 - 血管内プロセスにおける位置検知 - Google Patents
血管内プロセスにおける位置検知 Download PDFInfo
- Publication number
- JP6943883B2 JP6943883B2 JP2018560526A JP2018560526A JP6943883B2 JP 6943883 B2 JP6943883 B2 JP 6943883B2 JP 2018560526 A JP2018560526 A JP 2018560526A JP 2018560526 A JP2018560526 A JP 2018560526A JP 6943883 B2 JP6943883 B2 JP 6943883B2
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- magnetic
- catheter
- magnetic domain
- pickup
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/12—Diagnosis using ultrasonic, sonic or infrasonic waves in body cavities or body tracts, e.g. by using catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0059—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence
- A61B5/0082—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes
- A61B5/0084—Measuring for diagnostic purposes; Identification of persons using light, e.g. diagnosis by transillumination, diascopy, fluorescence adapted for particular medical purposes for introduction into the body, e.g. by catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording for evaluating the cardiovascular system, e.g. pulse, heart rate, blood pressure or blood flow
- A61B5/021—Measuring pressure in heart or blood vessels
- A61B5/0215—Measuring pressure in heart or blood vessels by means inserted into the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; Determining position of diagnostic devices within or on the body of the patient
- A61B5/061—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body
- A61B5/062—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body using magnetic field
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/04—Measuring blood pressure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/06—Measuring blood flow
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Clinical applications
- A61B8/0833—Clinical applications involving detecting or locating foreign bodies or organic structures
- A61B8/085—Clinical applications involving detecting or locating foreign bodies or organic structures for locating body or organic structures, e.g. tumours, calculi, blood vessels, nodules
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Clinical applications
- A61B8/0891—Clinical applications for diagnosis of blood vessels
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
- A61B8/4245—Details of probe positioning or probe attachment to the patient involving determining the position of the probe, e.g. with respect to an external reference frame or to the patient
- A61B8/4254—Details of probe positioning or probe attachment to the patient involving determining the position of the probe, e.g. with respect to an external reference frame or to the patient using sensors mounted on the probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4444—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device related to the probe
- A61B8/445—Details of catheter construction
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/483—Diagnostic techniques involving the acquisition of a 3D volume of data
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5207—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of raw data to produce diagnostic data, e.g. for generating an image
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
- G01S15/8906—Short-range imaging systems; Acoustic microscope systems using pulse-echo techniques
- G01S15/899—Combination of imaging systems with ancillary equipment
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/88—Sonar systems specially adapted for specific applications
- G01S15/89—Sonar systems specially adapted for specific applications for mapping or imaging
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Molecular Biology (AREA)
- Pathology (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Public Health (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Vascular Medicine (AREA)
- Cardiology (AREA)
- Hematology (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Acoustics & Sound (AREA)
- Human Computer Interaction (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physiology (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
- Endoscopes (AREA)
- Measuring Pulse, Heart Rate, Blood Pressure Or Blood Flow (AREA)
Description
本出願は、2016年5月19日に出願された米国仮特許出願第62/338,885号の優先権を主張する。
Claims (18)
- 血管内システムであって、
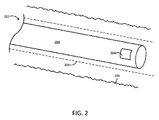
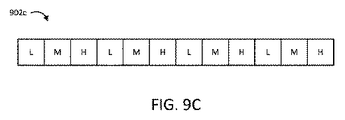
基端と、先端と、複数の磁区と、前記先端に配置されたセンサと、カテーテルの前記基端からカテーテルの前記先端まで延び且つ前記先端で前記センサに動作可能に接続されたケーブルと、を含むカテーテルであって、前記センサが患者の1つ以上の血管内特性を表すセンサ情報を提供するように構成されており、前記複数の磁区は、磁区の各グループが、連続的に配置された、第1の磁区の大きさを有する1つの磁区と、前記第1の磁区の大きさよりも大きな第2の磁区の大きさを有する1つの磁区と、前記第1の磁区の大きさ及び前記第2の磁区の大きさの各々よりも大きな第3の磁区の大きさを有する1つの磁区とを有するように、磁区の複数のグループで連続的に配置されており、前記磁区の各グループにおける前記第1の磁区の大きさは、同じ第1の磁区の大きさであり、前記磁区の各グループにおける前記第2の磁区の大きさは、同じ第2の磁区の大きさであり、前記磁区の各グループにおける前記第3の磁区の大きさは、同じ第3の磁区の大きさである、カテーテルと、
前記複数の磁区によって生成された磁気ピックアップの磁場に基づいてピックアップ信号を出力するように構成された磁気ピックアップと、
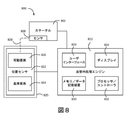
前記カテーテルのセンサおよび前記磁気ピックアップと通信する血管内処理エンジンであって、
(i)前記カテーテルの前記センサから前記センサ情報を受信し、
(ii)前記ピックアップ信号を表す位置信号を受信し、
(iii)前記受信した位置信号に基づいて、前記先端に配置されたセンサの位置に関連する位置情報を判定し、
(iv)前記受信されたセンサ情報と対応する判定された位置情報とを組み合わせるように構成された処理エンジンと、を備える、システム。 - 前記複数の磁区が前記ケーブル上に配置される、請求項1に記載のシステム。
- 前記ケーブルが磁化可能な材料を含み、前記複数の磁区が前記ケーブル自体に含まれる、請求項2に記載のシステム。
- 前記磁区が前記ケーブルに塗布された磁化コーティングに含まれる、請求項2に記載のシステム。
- さらに、患者とインターフェース接続し、前記ケーブルが弁を通って長手方向に並進できるように前記カテーテルを受け入れるために構成された弁をさらに備え、前記磁気ピックアップが前記弁内に配置される、請求項2に記載のシステム。
- 前記弁が止血弁を備える、請求項5に記載のシステム。
- さらに、前記弁内に配置され且つ前記磁気ピックアップからのピックアップ信号を受信し、無線通信リンクを介して受信した前記ピックアップ信号を示す前記血管内処理エンジンに、前記位置信号を通信するように構成された通信ユニットを備える、請求項5に記載のシステム。
- 前記カテーテルが血管内超音波(IVUS)カテーテルを備え、前記カテーテルの前記センサがIVUSトランスデューサを備え、前記ケーブルが駆動ケーブルを備え、
前記血管内処理エンジンが、長手方向IVUS画像を生成するために、前記IVUSトランスデューサからの画像情報および位置センサからの位置情報を受信するように構成されている、請求項2に記載のシステム。 - 前記カテーテルが、基端部を有するモノレール圧力センサ(MPS)カテーテルを備え、前記センサが圧力センサを備え、前記ケーブルがセンサ送達装置の基端部を備え、
前記血管内処理エンジンが、患者内の複数の位置における前記圧力センサからの圧力情報および前記位置のそれぞれにおける前記圧力情報に関連付けられた位置センサからの位置情報を受信するように構成されている、請求項2に記載のシステム。 - さらに、前記磁気ピックアップを支持し、前記センサが並進されるときに前記ケーブルが位置検知アセンブリに対して長手方向に並進するように、前記カテーテルの一部を受け入れるように構成された位置検知アセンブリを備える、請求項2に記載のシステム。
- 前記位置検知アセンブリが、前記磁気ピックアップにおけるノイズを低減するために、前記磁気ピックアップに近接して配置された遮蔽部を備える、請求項10に記載のシステム。
- 前記カテーテルが、さらに、第1の伸縮部および第2の伸縮部を備え、前記第1の伸縮部が、前記センサが患者内を移動するときに前記第2の伸縮部内を前記第2の伸縮部に対して移動するように構成され、前記複数の磁区が、前記第1および第2の伸縮部の一方に配置され、前記磁気ピックアップが、前記第1および第2の伸縮部の他方に配置される、請求項1に記載のシステム。
- 前記磁気ピックアップが複数の磁気抵抗要素を備える、請求項1に記載のシステム。
- 血管内カテーテル用の位置検知システムであって、
前記血管内カテーテルの一部に動作可能に結合された複数の磁区であって、前記複数の磁区は、磁区の各グループが、第1の磁区の大きさを有する1つの磁区と、前記第1の磁区の大きさよりも大きな第2の磁区の大きさを有する1つの磁区と、前記第1の磁区の大きさ及び前記第2の磁区の大きさの各々よりも大きな第3の磁区の大きさを有する1つの磁区とを有するように、磁区の複数のグループで配置されており、前記磁区の各グループにおける前記第1の磁区の大きさは、同じ第1の磁区の大きさであり、前記磁区の各グループにおける前記第2の磁区の大きさは、同じ第2の磁区の大きさであり、前記磁区の各グループにおける前記第3の磁区の大きさは、同じ第3の磁区の大きさである、複数の磁区と、
少なくとも1つの磁区に近接して配置された少なくとも1つのピックアップであって、前記複数の磁区によって引き起こされる磁場に少なくとも部分的に起因して前記ピックアップにおける前記磁場を表す信号を出力するように構成された少なくとも1つのピックアップと、
前記少なくとも1つのピックアップから出力された信号に基づいて位置信号を受信するように構成された血管内処理エンジンと、を備え、
前記複数の磁区が、前記複数の磁区の各々の位置が前記血管内カテーテルに結合された血管内センサの位置と相関するように前記血管内カテーテルに動作可能に結合されており、
前記血管内処理エンジンが、前記受信した位置信号に基づいて前記血管内センサの少なくとも相対位置を判定するように構成されている、システム。 - 前記複数の磁区が、既知のサイズを有し、前記血管内処理エンジンが、前記受信した位置信号および前記複数の磁区の既知のサイズに基づいて、前記血管内センサの動きの量を判定するように構成されている、請求項14に記載のシステム。
- さらに、前記少なくとも1つのピックアップからの出力信号を受信し、前記受信した出力信号に基づいて、前記血管内処理エンジンに位置信号を通信するように構成された通信ユニットを備える、請求項14に記載のシステム。
- 前記少なくとも1つのピックアップが複数のピックアップを備え、前記複数のピックアップが出力信号を生成するようにそれぞれ構成されており、前記血管内処理エンジンが、前記複数のピックアップのそれぞれの各出力信号を表す複数の位置信号を受信するように構成されている、請求項14に記載のシステム。
- 前記血管内処理エンジンが、前記複数の受信した位置信号に基づいて、前記血管内センサの動きの量および方向を判定するように構成されている、請求項17に記載のシステム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662338885P | 2016-05-19 | 2016-05-19 | |
| US62/338,885 | 2016-05-19 | ||
| PCT/US2017/033332 WO2017201288A1 (en) | 2016-05-19 | 2017-05-18 | Position sensing in intravascular processes |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019518523A JP2019518523A (ja) | 2019-07-04 |
| JP2019518523A5 JP2019518523A5 (ja) | 2020-07-02 |
| JP6943883B2 true JP6943883B2 (ja) | 2021-10-06 |
Family
ID=58794200
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018560526A Active JP6943883B2 (ja) | 2016-05-19 | 2017-05-18 | 血管内プロセスにおける位置検知 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11109833B2 (ja) |
| EP (1) | EP3457946B1 (ja) |
| JP (1) | JP6943883B2 (ja) |
| CN (1) | CN109561879B (ja) |
| WO (1) | WO2017201288A1 (ja) |
Families Citing this family (42)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9554774B2 (en) | 2008-12-08 | 2017-01-31 | Acist Medical Systems, Inc. | System and catheter for image guidance and methods thereof |
| US12514456B2 (en) | 2013-01-31 | 2026-01-06 | Eximo Medical Ltd. | System and methods for lesion characterization in blood vessels |
| US20150282734A1 (en) | 2014-04-08 | 2015-10-08 | Timothy Schweikert | Medical device placement system and a method for its use |
| JP6943883B2 (ja) | 2016-05-19 | 2021-10-06 | アシスト・メディカル・システムズ,インコーポレイテッド | 血管内プロセスにおける位置検知 |
| WO2017201287A1 (en) | 2016-05-19 | 2017-11-23 | Acist Medical Systems, Inc. | Position sensing in intravascular processes |
| US10835715B2 (en) * | 2016-08-08 | 2020-11-17 | Angiodynamics Va Llc | System and method for locating a catheter tip |
| WO2019118466A1 (en) * | 2017-12-11 | 2019-06-20 | Board Of Regents Of The University Of Texas System | Methods for characterizing cardiac valves and protheses |
| CN119564167A (zh) * | 2018-04-18 | 2025-03-07 | 波士顿科学国际有限公司 | 用连续生理测量值评估脉管的系统 |
| WO2019212984A1 (en) | 2018-05-01 | 2019-11-07 | Imperative Care, Inc. | Devices and methods for removing obstructive material from an intravascular site |
| US11471582B2 (en) | 2018-07-06 | 2022-10-18 | Incept, Llc | Vacuum transfer tool for extendable catheter |
| CN112533529A (zh) * | 2018-08-09 | 2021-03-19 | 皇家飞利浦有限公司 | 具有电容性压力传感器的腔内设备 |
| EP3870070B1 (en) * | 2018-10-26 | 2023-10-11 | Koninklijke Philips N.V. | Speed determination for intraluminal ultrasound imaging and associated devices, systems, and methods |
| US11766539B2 (en) | 2019-03-29 | 2023-09-26 | Incept, Llc | Enhanced flexibility neurovascular catheter |
| CN112294358B (zh) * | 2019-07-29 | 2024-12-17 | 桂林医学院第二附属医院 | 心房压力的测量设备 |
| CN110507365A (zh) * | 2019-10-08 | 2019-11-29 | 深圳开立生物医疗科技股份有限公司 | 一种ivus回撤系统及方法 |
| JP2023507553A (ja) | 2019-12-18 | 2023-02-24 | インパラティブ、ケア、インク. | 静脈血栓塞栓症を治療するための方法及びシステム |
| US20230248498A1 (en) | 2019-12-18 | 2023-08-10 | Imperative Care, Inc. | Manually rotatable thrombus engagement tool |
| US11259821B2 (en) | 2019-12-18 | 2022-03-01 | Imperative Care, Inc. | Aspiration system with accelerated response |
| EP4082428A4 (en) * | 2019-12-31 | 2024-03-20 | Insight Lifetech Co., Ltd. | INTRAVASCULAR PRESSURE MEASUREMENT SYSTEM |
| CN111493830B (zh) * | 2020-04-24 | 2023-03-24 | 天津恒宇医疗科技有限公司 | 一种基于冠脉分叉病变的oct三维可视化系统及工作方法 |
| US20220133134A1 (en) * | 2020-11-04 | 2022-05-05 | Kotl, Llc | Imaging and pressure sensing apparatus and probes with a slidable sheath |
| US12144488B2 (en) * | 2021-01-14 | 2024-11-19 | Covidien Lp | Magnetically controlled power button and gyroscope external to the lung used to measure orientation of instrument in the lung |
| US12564414B2 (en) | 2022-08-01 | 2026-03-03 | Imperative Care, Inc. | Method of supra-aortic access for a neurovascular procedure |
| US12440289B2 (en) | 2022-08-01 | 2025-10-14 | Imperative Care, Inc. | Method of priming an interventional device assembly |
| US12558175B2 (en) | 2021-08-12 | 2026-02-24 | Imperative Care, Inc. | Multi catheter method of performing a robotic neurovascular procedure |
| US12564458B2 (en) | 2022-08-01 | 2026-03-03 | Imperative Care, Inc. | Method of robotically driving a multi catheter assembly above the aortic arch |
| US12447317B2 (en) | 2022-08-01 | 2025-10-21 | Imperative Care, Inc. | Method of priming concentrically stacked interventional devices |
| US12419703B2 (en) | 2022-08-01 | 2025-09-23 | Imperative Care, Inc. | Robotic drive system for achieving supra-aortic access |
| US12446979B2 (en) | 2022-08-01 | 2025-10-21 | Imperative Care, Inc. | Method of performing a multi catheter robotic neurovascular procedure |
| USD1077996S1 (en) | 2021-10-18 | 2025-06-03 | Imperative Care, Inc. | Inline fluid filter |
| EP4193908A1 (en) | 2021-12-08 | 2023-06-14 | Koninklijke Philips N.V. | Improving mapping of an anatomical cavity and/or location tracking in the anatomical cavity |
| EP4198998A1 (en) | 2021-12-17 | 2023-06-21 | Koninklijke Philips N.V. | Aiding an analysis of an anatomical element of a subject |
| EP4202846A1 (en) | 2021-12-23 | 2023-06-28 | Koninklijke Philips N.V. | Adaptive 3d modelling of an anatomical cavity |
| US12569224B2 (en) * | 2022-05-06 | 2026-03-10 | Boston Scientific Scimed, Inc. | Intravascular imaging devices |
| US20240041480A1 (en) | 2022-08-02 | 2024-02-08 | Imperative Care, Inc. | Multi catheter system with integrated fluidics management |
| EP4626353A1 (en) | 2022-12-01 | 2025-10-08 | Imperative Care, Inc. | Controller for robotic catheter drive system |
| US12433702B2 (en) | 2022-12-01 | 2025-10-07 | Imperative Care, Inc. | Telescoping drive table |
| US12377206B2 (en) | 2023-05-17 | 2025-08-05 | Imperative Care, Inc. | Fluidics control system for multi catheter stack |
| CN121586597A (zh) | 2023-05-31 | 2026-02-27 | 因普瑞缇夫护理公司 | 通过无菌区域屏障的磁连接 |
| USD1102447S1 (en) | 2023-11-30 | 2025-11-18 | Imperative Care, Inc. | Display screen or portion thereof with graphical user interface |
| US12171917B1 (en) | 2024-01-08 | 2024-12-24 | Imperative Care, Inc. | Devices for blood capture and reintroduction during aspiration procedure |
| WO2025221788A1 (en) * | 2024-04-17 | 2025-10-23 | Opsens Inc. | Vascular segment assessment system |
Family Cites Families (135)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4756313A (en) | 1986-11-05 | 1988-07-12 | Advanced Diagnostic Medical Systems, Inc. | Ultrasonic probe |
| JPS63122923A (ja) | 1986-11-13 | 1988-05-26 | Agency Of Ind Science & Technol | 超音波測温装置 |
| JPS63281632A (ja) | 1987-05-14 | 1988-11-18 | Olympus Optical Co Ltd | 内視鏡装置 |
| JP2746584B2 (ja) | 1987-06-04 | 1998-05-06 | オリンパス光学工業株式会社 | 内視鏡用超音波診断装置 |
| GB2229497B (en) | 1989-03-10 | 1992-06-03 | Graseby Medical Ltd | Infusion pump |
| JPH0417843A (ja) | 1990-05-10 | 1992-01-22 | Olympus Optical Co Ltd | 超音波診断装置 |
| DK0544820T3 (da) | 1990-08-21 | 2000-08-07 | Boston Scient Ltd | Akustisk imagografikateter og lignende |
| US5327885A (en) | 1991-10-08 | 1994-07-12 | Griffith James M | Combination catheter for invasive probe delivery and balloon dilation |
| JPH05244694A (ja) | 1992-02-28 | 1993-09-21 | Fujitsu Ltd | 超音波探触子 |
| US6996432B2 (en) | 1992-06-30 | 2006-02-07 | Scimed Life Systems, Inc. | Automated longitudinal position translator for ultrasonic imaging probes, and methods of using same |
| US5361768A (en) | 1992-06-30 | 1994-11-08 | Cardiovascular Imaging Systems, Inc. | Automated longitudinal position translator for ultrasonic imaging probes, and methods of using same |
| JPH078497A (ja) | 1993-06-25 | 1995-01-13 | Toshiba Corp | 超音波診断装置 |
| DE69432148T2 (de) | 1993-07-01 | 2003-10-16 | Boston Scientific Ltd., St. Michael | Katheter zur bilddarstellung, zur anzeige elektrischer signale und zur ablation |
| JP3280485B2 (ja) | 1993-09-30 | 2002-05-13 | テルモ株式会社 | 体腔内超音波プローブ |
| JPH07136171A (ja) | 1993-11-18 | 1995-05-30 | Olympus Optical Co Ltd | 超音波診断装置 |
| JPH07184902A (ja) | 1993-12-28 | 1995-07-25 | Olympus Optical Co Ltd | 体腔内超音波プローブ |
| US20080154257A1 (en) | 2006-12-22 | 2008-06-26 | Shiva Sharareh | Real-time optoacoustic monitoring with electophysiologic catheters |
| DE69531118D1 (de) | 1994-07-14 | 2003-07-24 | Washington Res Foundation Seat | Vorrichtung zum nachweis der barrett metaplasie in der speiseröhre |
| JP3526478B2 (ja) | 1994-10-17 | 2004-05-17 | オリンパス株式会社 | 超音波プローブ |
| US6302875B1 (en) | 1996-10-11 | 2001-10-16 | Transvascular, Inc. | Catheters and related devices for forming passageways between blood vessels or other anatomical structures |
| US5827313A (en) | 1996-09-27 | 1998-10-27 | Boston Scientific Corporation | Device for controlled longitudinal movement of an operative element within a catheter sheath and method |
| US6058323A (en) | 1996-11-05 | 2000-05-02 | Lemelson; Jerome | System and method for treating select tissue in a living being |
| US5908395A (en) | 1997-03-17 | 1999-06-01 | Advanced Cardiovascular Systems, Inc. | Vibrating guidewire |
| US6263230B1 (en) * | 1997-05-08 | 2001-07-17 | Lucent Medical Systems, Inc. | System and method to determine the location and orientation of an indwelling medical device |
| GB2329708B (en) | 1997-09-24 | 2002-05-08 | Roke Manor Research | Catheter localisation system |
| US6004271A (en) | 1998-05-07 | 1999-12-21 | Boston Scientific Corporation | Combined motor drive and automated longitudinal position translator for ultrasonic imaging system |
| US6319227B1 (en) | 1998-08-05 | 2001-11-20 | Scimed Life Systems, Inc. | Automatic/manual longitudinal position translator and rotary drive system for catheters |
| US6398755B1 (en) | 1998-10-06 | 2002-06-04 | Scimed Life Systems, Inc. | Driveable catheter system |
| EP1929954B1 (en) | 1998-10-23 | 2010-05-26 | Boston Scientific Limited | Improved system for intraluminal imaging |
| JP4056643B2 (ja) | 1998-11-27 | 2008-03-05 | オリンパス株式会社 | 超音波診断装置 |
| US6726698B2 (en) | 1999-03-02 | 2004-04-27 | Sound Surgical Technologies Llc | Pulsed ultrasonic device and method |
| US6251078B1 (en) | 1999-04-12 | 2001-06-26 | Scimed Life Systems, Inc. | Preamplifier and protection circuit for an ultrasound catheter |
| US6424356B2 (en) | 1999-05-05 | 2002-07-23 | Immersion Corporation | Command of force sensations in a forceback system using force effect suites |
| US6315732B1 (en) | 1999-07-20 | 2001-11-13 | Scimed Life Systems, Inc. | Imaging catheter and methods of use for ultrasound-guided ablation |
| KR100360259B1 (ko) | 2000-07-26 | 2002-11-09 | 엘지전자 주식회사 | 2자유도형 전동기 |
| US6679845B2 (en) | 2000-08-30 | 2004-01-20 | The Penn State Research Foundation | High frequency synthetic ultrasound array incorporating an actuator |
| JP3584883B2 (ja) | 2001-01-17 | 2004-11-04 | 日本電気株式会社 | 合成開口ソーナー及び合成開口処理方法 |
| JP2002301070A (ja) | 2001-04-04 | 2002-10-15 | Fuji Photo Film Co Ltd | 超音波撮像方法及び装置 |
| US6773402B2 (en) | 2001-07-10 | 2004-08-10 | Biosense, Inc. | Location sensing with real-time ultrasound imaging |
| US6592520B1 (en) | 2001-07-31 | 2003-07-15 | Koninklijke Philips Electronics N.V. | Intravascular ultrasound imaging apparatus and method |
| WO2003011139A1 (en) | 2001-07-31 | 2003-02-13 | Koninklijke Philips Electronics N.V. | Transesophageal and transnasal, transesophageal ultrasound imaging systems |
| US6572547B2 (en) | 2001-07-31 | 2003-06-03 | Koninklijke Philips Electronics N.V. | Transesophageal and transnasal, transesophageal ultrasound imaging systems |
| US7093361B2 (en) | 2002-01-23 | 2006-08-22 | Control Products, Inc. | Method of assembling an actuator with an internal sensor |
| US6824516B2 (en) | 2002-03-11 | 2004-11-30 | Medsci Technologies, Inc. | System for examining, mapping, diagnosing, and treating diseases of the prostate |
| JP3875581B2 (ja) | 2002-03-18 | 2007-01-31 | 独立行政法人科学技術振興機構 | 超音波診断システム |
| US20030187369A1 (en) | 2002-03-28 | 2003-10-02 | Lewis Stephen B. | Optical pullback sensor for measuring linear displacement of a catheter or other elongate member |
| JP4933045B2 (ja) | 2002-08-26 | 2012-05-16 | ザ クリーブランド クリニック ファウンデーション | 血管組織を特徴付けするシステムおよび方法 |
| US7306593B2 (en) | 2002-10-21 | 2007-12-11 | Biosense, Inc. | Prediction and assessment of ablation of cardiac tissue |
| US7001383B2 (en) | 2002-10-21 | 2006-02-21 | Biosense, Inc. | Real-time monitoring and mapping of ablation lesion formation in the heart |
| US20040097803A1 (en) * | 2002-11-20 | 2004-05-20 | Dorin Panescu | 3-D catheter localization using permanent magnets with asymmetrical properties about their longitudinal axis |
| US7481798B2 (en) | 2003-03-20 | 2009-01-27 | Boston Scientific Scimed, Inc. | Devices and methods for delivering therapeutic or diagnostic agents |
| US8157739B2 (en) | 2003-09-02 | 2012-04-17 | Surf Technology As | Ultrasound imaging with synthetic receive aperture and wide aperture, focused transmit beam |
| JP4098266B2 (ja) | 2004-03-24 | 2008-06-11 | オリンパス株式会社 | 超音波画像診断装置 |
| JP4554967B2 (ja) | 2004-03-25 | 2010-09-29 | テルモ株式会社 | 超音波カテーテルおよび画像診断装置 |
| US20130211436A1 (en) | 2004-04-07 | 2013-08-15 | Sonorythm Llc | Treatment of cardiac arrhythmia utilizing ultrasound |
| US8747389B2 (en) | 2004-04-21 | 2014-06-10 | Acclarent, Inc. | Systems for treating disorders of the ear, nose and throat |
| US20070219448A1 (en) | 2004-05-06 | 2007-09-20 | Focus Surgery, Inc. | Method and Apparatus for Selective Treatment of Tissue |
| US7645917B2 (en) | 2004-07-26 | 2010-01-12 | The University Of Hong Kong | Mutant mice comprising a mutated type II procollagen alpha-1 |
| US20080177180A1 (en) | 2004-08-17 | 2008-07-24 | Technion Research & Development | Ultrasonic Image-Guided Tissue-Damaging Procedure |
| JP2006102240A (ja) | 2004-10-06 | 2006-04-20 | Olympus Corp | 超音波診断医用カプセル |
| US10123903B2 (en) | 2004-10-14 | 2018-11-13 | Koninklijke Philips N.V. | Ablation devices and methods with ultrasonic imaging |
| US8617152B2 (en) | 2004-11-15 | 2013-12-31 | Medtronic Ablation Frontiers Llc | Ablation system with feedback |
| US7713210B2 (en) | 2004-11-23 | 2010-05-11 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Method and apparatus for localizing an ultrasound catheter |
| US7892177B2 (en) | 2005-02-28 | 2011-02-22 | Scimed Life Systems, Inc. | Systems and methods for estimating the length and position of a stent to be applied within a patient |
| US20060224153A1 (en) | 2005-04-05 | 2006-10-05 | Fischell Robert E | Catheter system for the treatment of atrial fibrillation |
| US20060241445A1 (en) | 2005-04-26 | 2006-10-26 | Altmann Andres C | Three-dimensional cardial imaging using ultrasound contour reconstruction |
| JP5001261B2 (ja) | 2005-05-04 | 2012-08-15 | フルイド メディカル,インコーポレイテッド | 血管内イメージング用の小型アクチュエータ機構 |
| US8068647B2 (en) | 2005-06-14 | 2011-11-29 | General Electric Company | Method and apparatus for real-time motion correction for ultrasound spatial compound imaging |
| JP2007044074A (ja) | 2005-08-05 | 2007-02-22 | Olympus Corp | 超音波診断装置 |
| WO2007033379A2 (en) * | 2005-09-14 | 2007-03-22 | Neoguide Systems, Inc. | Methods and apparatus for performing transluminal and other procedures |
| US20070062251A1 (en) | 2005-09-19 | 2007-03-22 | Lifescan, Inc. | Infusion Pump With Closed Loop Control and Algorithm |
| DE102005048892B4 (de) | 2005-09-22 | 2009-01-15 | Siemens Ag | Vorrichtung zur Durchführung von Rotablation sowie medizinische Behandlungseinrichtung |
| CA2625162C (en) | 2005-10-11 | 2017-01-17 | Carnegie Mellon University | Sensor guided catheter navigation system |
| US7988633B2 (en) | 2005-10-12 | 2011-08-02 | Volcano Corporation | Apparatus and method for use of RFID catheter intelligence |
| US20070106147A1 (en) | 2005-11-01 | 2007-05-10 | Altmann Andres C | Controlling direction of ultrasound imaging catheter |
| US7766833B2 (en) | 2005-11-23 | 2010-08-03 | General Electric Company | Ablation array having independently activated ablation elements |
| US20070167821A1 (en) | 2005-11-30 | 2007-07-19 | Warren Lee | Rotatable transducer array for volumetric ultrasound |
| US7963919B2 (en) | 2005-12-07 | 2011-06-21 | Siemens Medical Solutions Usa, Inc. | Ultrasound imaging transducer array for synthetic aperture |
| JP4768494B2 (ja) | 2006-03-31 | 2011-09-07 | テルモ株式会社 | 画像診断装置およびその処理方法 |
| JP4838032B2 (ja) | 2006-03-31 | 2011-12-14 | テルモ株式会社 | 画像診断装置およびその処理方法 |
| WO2007133882A2 (en) | 2006-05-12 | 2007-11-22 | Koninklijke Philips Electronics, N.V. | Retrospective dynamic transmit focusing for spatial compounding |
| JP2008053887A (ja) | 2006-08-23 | 2008-03-06 | Hitachi Maxell Ltd | カメラモジュール |
| DE602007012450D1 (de) | 2006-10-02 | 2011-03-24 | Hansen Medical Inc | System für dreidimensionale ultraschall-abbildung |
| US8174395B2 (en) | 2006-11-20 | 2012-05-08 | St. Jude Medical Systems Ab | Transceiver unit in a measurement system |
| US20080146941A1 (en) | 2006-12-13 | 2008-06-19 | Ep Medsystems, Inc. | Catheter Position Tracking for Intracardiac Catheters |
| US20080154131A1 (en) | 2006-12-20 | 2008-06-26 | General Electric Company | Methods for enhancement of visibility of ablation regions |
| AU2008207265B2 (en) | 2007-01-19 | 2013-08-01 | Sunnybrook Health Sciences Centre | Scanning mechanisms for imaging probe |
| US7996057B2 (en) | 2007-01-31 | 2011-08-09 | Biosense Webster, Inc. | Ultrasound catheter calibration with enhanced accuracy |
| WO2008100386A2 (en) | 2007-02-09 | 2008-08-21 | Board Of Regents, The University Of Texas System | Intravascular photoacoustic and ultrasound echo imaging |
| US20080200801A1 (en) | 2007-02-21 | 2008-08-21 | Douglas Glenn Wildes | Mapping Movement of a Movable Transducer |
| CN101687087B (zh) * | 2007-04-16 | 2014-06-25 | C.R.巴德有限公司 | 导丝辅助型导管放置系统 |
| US7635974B2 (en) | 2007-05-02 | 2009-12-22 | Magic Technologies, Inc. | Magnetic tunnel junction (MTJ) based magnetic field angle sensor |
| EP2626027B1 (en) | 2007-08-14 | 2020-04-29 | Koninklijke Philips N.V. | Robotic instrument systems utilizing optical fiber sensors |
| JP5095304B2 (ja) | 2007-08-21 | 2012-12-12 | 株式会社東芝 | 超音波診断装置 |
| US20090088628A1 (en) | 2007-09-27 | 2009-04-02 | Klaus Klingenbeck-Regn | Efficient workflow for afib treatment in the ep lab |
| AU2013201648B2 (en) | 2007-11-26 | 2014-04-24 | C.R. Bard, Inc. | Integrated system for intravascular placement of a catheter |
| US8062226B2 (en) | 2007-12-17 | 2011-11-22 | Silicon Valley Medical Instruments, Inc. | Telescope for an imaging catheter |
| DE102008013854A1 (de) | 2008-03-12 | 2009-09-24 | Siemens Aktiengesellschaft | Katheter und zugehörige medizinische Untersuchungs- und Behandlungseinrichtung |
| DE102008013858A1 (de) | 2008-03-12 | 2009-09-24 | Siemens Aktiengesellschaft | Kathetervorrichtung und zugehörige medizinische Untersuchungs- und Behandlungseinrichtung |
| US8192398B2 (en) | 2008-03-13 | 2012-06-05 | Medtronic, Inc. | Medical device and medical instrument alignment |
| EP2326381A4 (en) | 2008-08-26 | 2011-09-21 | Silicon Valley Medical Instr Inc | DISTAL PART FOR MONORAIL CATHETER |
| BRPI0918563B8 (pt) | 2008-09-11 | 2021-06-22 | Acist Medical Sys Inc | dispositivo distribuidor de sensor fisiológico e método |
| US9554774B2 (en) * | 2008-12-08 | 2017-01-31 | Acist Medical Systems, Inc. | System and catheter for image guidance and methods thereof |
| US20100179434A1 (en) | 2009-01-09 | 2010-07-15 | Boston Scientific Scimed, Inc. | Systems and methods for making and using intravascular ultrasound systems with photo-acoustic imaging capabilities |
| EP4252820A3 (en) | 2009-03-18 | 2023-11-29 | Corindus, Inc. | Remote catheter system with steerable catheter |
| US8298149B2 (en) | 2009-03-31 | 2012-10-30 | Boston Scientific Scimed, Inc. | Systems and methods for making and using a motor distally-positioned within a catheter of an intravascular ultrasound imaging system |
| US8403935B2 (en) | 2009-11-10 | 2013-03-26 | Wright Medical Technology, Inc. | Adjustable revision guide |
| RU2555381C2 (ru) | 2009-11-12 | 2015-07-10 | Конинклейке Филипс Электроникс Н.В. | Система направления и катетерная система |
| CN102985019A (zh) * | 2010-01-11 | 2013-03-20 | 阿尔斯塔西斯公司 | 用于在组织中形成管道的装置 |
| US8374670B2 (en) * | 2010-01-22 | 2013-02-12 | Biosense Webster, Inc. | Catheter having a force sensing distal tip |
| CA2800813C (en) * | 2010-05-28 | 2019-10-29 | C.R. Bard, Inc. | Apparatus for use with needle insertion guidance system |
| EP2616126A4 (en) | 2010-09-17 | 2017-05-24 | Corindus Inc. | Wheel for robotic catheter system drive mechanism |
| US20120071894A1 (en) | 2010-09-17 | 2012-03-22 | Tanner Neal A | Robotic medical systems and methods |
| KR20140051284A (ko) | 2011-07-06 | 2014-04-30 | 씨. 알. 바드, 인크. | 삽입 유도 시스템을 위한 바늘 길이 결정 및 교정 |
| US8824408B2 (en) | 2011-08-11 | 2014-09-02 | Industrial Technology Research Institute | Method of handling random access procedure associated to cell deactivation |
| US20130137963A1 (en) | 2011-11-29 | 2013-05-30 | Eric S. Olson | System and method for automatically initializing or initiating a motion compensation algorithm |
| US9402555B2 (en) | 2011-12-29 | 2016-08-02 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Drive assembly for use in a robotic control and guidance system |
| US20150038824A1 (en) | 2012-02-14 | 2015-02-05 | St. Jude Medical, Atrial Fibrillation Division, Inc. | System for assessing effects of ablation therapy on cardiac tissue using photoacoustics |
| US20130303886A1 (en) | 2012-05-09 | 2013-11-14 | Doron Moshe Ludwin | Locating a catheter sheath end point |
| US9549679B2 (en) * | 2012-05-14 | 2017-01-24 | Acist Medical Systems, Inc. | Multiple transducer delivery device and method |
| DE102012213456A1 (de) * | 2012-07-31 | 2014-02-06 | Siemens Aktiengesellschaft | Katheter mit Ultraschallsensor und Verfahren zum Erzeugen einer Volumengrafik mittels des Katheters |
| CN202876024U (zh) * | 2012-09-13 | 2013-04-17 | 业聚医疗器械(深圳)有限公司 | 导管鞘 |
| EP2914327B1 (en) | 2012-11-01 | 2021-08-04 | Muffin Incorporated | Implements for identifying sheath migration |
| US20140163361A1 (en) | 2012-12-12 | 2014-06-12 | Volcano Corporation | Combination Rotational and Phased-Array In Vivo Imaging Devices and Methods |
| WO2014100606A1 (en) | 2012-12-21 | 2014-06-26 | Meyer, Douglas | Rotational ultrasound imaging catheter with extended catheter body telescope |
| US9204841B2 (en) * | 2012-12-31 | 2015-12-08 | Biosense Webster (Israel) Ltd. | Catheter with serially connected sensing structures and methods of calibration and detection |
| GB201303917D0 (en) | 2013-03-05 | 2013-04-17 | Ezono Ag | System for image guided procedure |
| US9414812B2 (en) | 2013-05-14 | 2016-08-16 | Acist Medical Systems, Inc. | System and method for monitoring device engagement |
| US9180260B2 (en) * | 2013-08-30 | 2015-11-10 | Covidien Lp | Systems and methods for monitoring an injection procedure |
| CN105705081A (zh) * | 2013-11-15 | 2016-06-22 | 阿西斯特医疗系统有限公司 | 多传感器病变评价装置和方法 |
| US9713456B2 (en) * | 2013-12-30 | 2017-07-25 | Acist Medical Systems, Inc. | Position sensing in intravascular imaging |
| EP3089672B1 (en) | 2013-12-30 | 2019-11-27 | Acist Medical Systems, Inc. | Position sensing in intravascular imaging |
| WO2015138708A1 (en) * | 2014-03-12 | 2015-09-17 | Proximed, Llc | Surgical guidance systems, devices, and methods |
| US10512449B2 (en) * | 2014-09-19 | 2019-12-24 | Volcano Corporation | Intravascular device for vessel measurement and associated systems, devices, and methods |
| JP6943883B2 (ja) | 2016-05-19 | 2021-10-06 | アシスト・メディカル・システムズ,インコーポレイテッド | 血管内プロセスにおける位置検知 |
-
2017
- 2017-05-18 JP JP2018560526A patent/JP6943883B2/ja active Active
- 2017-05-18 EP EP17726453.8A patent/EP3457946B1/en active Active
- 2017-05-18 US US15/599,000 patent/US11109833B2/en active Active
- 2017-05-18 CN CN201780037942.9A patent/CN109561879B/zh active Active
- 2017-05-18 WO PCT/US2017/033332 patent/WO2017201288A1/en not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| CN109561879A (zh) | 2019-04-02 |
| CN109561879B (zh) | 2022-03-29 |
| EP3457946B1 (en) | 2023-05-03 |
| US20170333000A1 (en) | 2017-11-23 |
| US11109833B2 (en) | 2021-09-07 |
| WO2017201288A1 (en) | 2017-11-23 |
| EP3457946A1 (en) | 2019-03-27 |
| JP2019518523A (ja) | 2019-07-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6943883B2 (ja) | 血管内プロセスにおける位置検知 | |
| JP6963567B2 (ja) | 血管内プロセスにおける位置検知 | |
| JP7612816B2 (ja) | 管腔内超音波イメージングのための速度決定、並びに関連するデバイス、システム、及び方法 | |
| CN111867481B (zh) | 确定和可视化解剖学标志用于管腔内损伤评估和处置规划 | |
| EP3064127B1 (en) | Device and methods for measuring and treating an anatomical structure | |
| US10076301B2 (en) | Devices, systems, and methods for assessment of vessels | |
| JP2021531859A (ja) | 医用画像を用いる管腔評価において複数の管腔内画像を表示するシステム、装置、及び方法 | |
| JP2017536917A (ja) | ステント内再狭窄予測のためのデバイス、システム、及び方法 | |
| JP2016538048A (ja) | マルチセンサ患部評価装置および方法 | |
| CN112494016B (zh) | 用于处理压力信号的主机 | |
| HK1225939B (en) | Device and methods for measuring and treating an anatomical structure |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200518 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200518 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210331 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210406 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210705 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210810 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210909 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6943883 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |