JP6941936B2 - Decelerator - Google Patents
Decelerator Download PDFInfo
- Publication number
- JP6941936B2 JP6941936B2 JP2016236080A JP2016236080A JP6941936B2 JP 6941936 B2 JP6941936 B2 JP 6941936B2 JP 2016236080 A JP2016236080 A JP 2016236080A JP 2016236080 A JP2016236080 A JP 2016236080A JP 6941936 B2 JP6941936 B2 JP 6941936B2
- Authority
- JP
- Japan
- Prior art keywords
- intersection
- gear
- carrier member
- casing
- external
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C19/00—Bearings with rolling contact, for exclusively rotary movement
- F16C19/22—Bearings with rolling contact, for exclusively rotary movement with bearing rollers essentially of the same size in one or more circular rows, e.g. needle bearings
- F16C19/34—Bearings with rolling contact, for exclusively rotary movement with bearing rollers essentially of the same size in one or more circular rows, e.g. needle bearings for both radial and axial load
- F16C19/36—Bearings with rolling contact, for exclusively rotary movement with bearing rollers essentially of the same size in one or more circular rows, e.g. needle bearings for both radial and axial load with a single row of rollers
- F16C19/364—Bearings with rolling contact, for exclusively rotary movement with bearing rollers essentially of the same size in one or more circular rows, e.g. needle bearings for both radial and axial load with a single row of rollers with tapered rollers, i.e. rollers having essentially the shape of a truncated cone
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/02—Gearboxes; Mounting gearing therein
- F16H57/021—Shaft support structures, e.g. partition walls, bearing eyes, casing walls or covers with bearings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H1/00—Toothed gearings for conveying rotary motion
- F16H1/28—Toothed gearings for conveying rotary motion with gears having orbital motion
- F16H1/32—Toothed gearings for conveying rotary motion with gears having orbital motion in which the central axis of the gearing lies inside the periphery of an orbital gear
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H49/00—Other gearings
- F16H49/001—Wave gearings, e.g. harmonic drive transmissions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/02—Gearboxes; Mounting gearing therein
- F16H57/023—Mounting or installation of gears or shafts in the gearboxes, e.g. methods or means for assembly
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/02—Gearboxes; Mounting gearing therein
- F16H57/029—Gearboxes; Mounting gearing therein characterised by means for sealing the gearboxes, e.g. to improve airtightness
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H1/00—Toothed gearings for conveying rotary motion
- F16H1/28—Toothed gearings for conveying rotary motion with gears having orbital motion
- F16H1/32—Toothed gearings for conveying rotary motion with gears having orbital motion in which the central axis of the gearing lies inside the periphery of an orbital gear
- F16H2001/323—Toothed gearings for conveying rotary motion with gears having orbital motion in which the central axis of the gearing lies inside the periphery of an orbital gear comprising eccentric crankshafts driving or driven by a gearing
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/04—Features relating to lubrication or cooling or heating
- F16H57/0467—Elements of gearings to be lubricated, cooled or heated
- F16H57/0469—Bearings or seals
- F16H57/0471—Bearing
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/04—Features relating to lubrication or cooling or heating
- F16H57/048—Type of gearings to be lubricated, cooled or heated
- F16H57/0482—Gearings with gears having orbital motion
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Retarders (AREA)
- Rolling Contact Bearings (AREA)
Description
本発明は、減速装置に関する。 The present invention relates to a speed reducer.
産業用ロボットのアームの関節部等に用いられる減速装置が知られている(例えば特許文献1)。この減速装置は、内歯歯車と外歯歯車の相対回転が、ケーシングとキャリヤ部材の相対回転として取り出される。このため、ケーシングとキャリヤ部材は、「主軸受」と称される径の大きい、すなわち負荷容量の大きい軸受を介して相対回転可能に構成される。 A speed reducing device used for a joint portion of an arm of an industrial robot is known (for example, Patent Document 1). In this speed reducer, the relative rotation of the internal gear and the external gear is taken out as the relative rotation of the casing and the carrier member. Therefore, the casing and the carrier member are configured to be relatively rotatable via a bearing having a large diameter, that is, a large load capacity, which is called a “main bearing”.
例えば産業用ロボットのアームなど、減速装置が組み込まれる産業機械によっては、あるいは産業機械の用途によっては、産業機械側から減速装置の主軸受に大きなモーメント荷重が加わるので、減速装置の主軸受には、モーメント荷重に対する高い耐性、すなわち大きなモーメント剛性が要求される。 For example, depending on the industrial machine in which the speed reducer is incorporated, such as the arm of an industrial robot, or depending on the application of the industrial machine, a large moment load is applied to the main bearing of the speed reducer from the industrial machine side. , High resistance to moment load, that is, large moment rigidity is required.
一方で、減速装置にはさらなる小型化が求められている。小型化を実現するための手法のひとつとして、主軸受にクロスローラ軸受を採用することがある。クロスローラ軸受を採用した場合、内部予圧を与えることで高いモーメント剛性を得ることができるが、ころが滑りながら移動する特性上、内部予圧を与えると回転トルクが飛躍的に高くなるとともに寿命も短くなるため好ましくない。したがって、大きなモーメント剛性を確保することはそれほど単純ではない。 On the other hand, the reduction gear is required to be further miniaturized. As one of the methods for realizing miniaturization, a cross roller bearing is adopted as the main bearing. When a cross roller bearing is used, high moment rigidity can be obtained by applying an internal preload, but due to the characteristics of the rollers moving while sliding, applying an internal preload dramatically increases the rotational torque and shortens the service life. Therefore, it is not preferable. Therefore, ensuring a large moment stiffness is not so simple.
本発明はこうした状況に鑑みてなされたものであり、その目的は、小型でありながらも主軸受のモーメント剛性が比較的高い減速装置を提供することにある。 The present invention has been made in view of such a situation, and an object of the present invention is to provide a reduction gear having a relatively high moment rigidity of a main bearing while being compact.
上記課題を解決するために、本発明のある態様の減速装置は、ケーシングと、ケーシングに設けられた内歯歯車と、内歯歯車と噛合う外歯歯車と、外歯歯車の自転成分または公転成分と同期するキャリヤ部材と、ケーシングとキャリヤ部材との間に配置された主軸受と、を備えた減速装置であって、主軸受は、ケーシングおよびキャリヤ部材の一方に設けられた外輪と、ケーシングおよびキャリヤ部材の他方に設けられた内輪と、外輪と内輪との間に配置される複数のテーパころと、を有する。複数のテーパころは、第1テーパころと、第1テーパころとは異なる転走面を転走する第2テーパころと、が周方向に交互に配置され、内歯歯車と外歯歯車の噛合い部の少なくとも一部が、外輪における第1テーパころの転走面と内輪における第1テーパころの転走面の同一平面上における延長線の交点である第1交点と、外輪における第2テーパころの転走面と内輪における第2テーパころの転走面の同一平面上における延長線の交点である第2交点との間に位置する。 In order to solve the above problems, the speed reducer according to an embodiment of the present invention includes a casing, an internal gear provided in the casing, an external gear that meshes with the internal gear, and a rotation component or revolution of the external gear. A speed reducer including a carrier member synchronized with a component and a main bearing arranged between the casing and the carrier member. The main bearing is an outer ring provided on one of the casing and the carrier member, and a casing. And an inner ring provided on the other side of the carrier member, and a plurality of tapered rollers arranged between the outer ring and the inner ring. As for the plurality of tapered rollers, the first tapered roller and the second tapered roller that rolls on a rolling surface different from the first tapered roller are alternately arranged in the circumferential direction, and the internal gear and the external gear mesh with each other. At least a part of the part is the first intersection, which is the intersection of the extension lines of the rolling surface of the first taper roller on the outer ring and the rolling surface of the first taper roller on the inner ring on the same plane, and the second taper on the outer ring. It is located between the rolling surface of the roller and the second intersection, which is the intersection of the extension lines on the same plane of the rolling surface of the second tapered roller on the inner ring.
なお、以上の構成要素の任意の組み合わせや、本発明の構成要素や表現を方法、装置、システムなどの間で相互に置換したものもまた、本発明の態様として有効である。 It should be noted that any combination of the above components and those in which the components and expressions of the present invention are mutually replaced between methods, devices, systems and the like are also effective as aspects of the present invention.
本発明によれば、小型でありながらも主軸受のモーメント剛性が比較的高い減速装置を提供できる。 According to the present invention, it is possible to provide a speed reducer having a relatively high moment rigidity of a main bearing while being compact.
以下、各図面に示される同一または同等の構成要素、部材、工程には、同一の符号を付するものとし、適宜重複した説明は省略する。また、各図面における部材の寸法は、理解を容易にするために適宜拡大、縮小して示される。また、各図面において実施の形態を説明する上で重要ではない部材の一部は省略して表示する。 Hereinafter, the same or equivalent components, members, and processes shown in the drawings shall be designated by the same reference numerals, and redundant description will be omitted as appropriate. In addition, the dimensions of the members in each drawing are shown enlarged or reduced as appropriate for easy understanding. In addition, some of the members that are not important for explaining the embodiment in each drawing are omitted and displayed.
(第1の実施の形態)
図1は、第1の実施の形態に係る減速装置100を示す断面図である。減速装置100は、センタークランクタイプの偏心揺動型の減速装置である。減速装置100は、例えば産業用ロボットのアームを構成する根本側の第1アームと先端側の第2アームとの関節部に用いられる。減速装置100は、第1アーム内に組み込まれるモータの回転を減速して第2アームに出力することにより、第2アームを第1アームに対して相対回転させる。
(First Embodiment)
FIG. 1 is a cross-sectional view showing a
減速装置100は、入力軸2と、偏心体4、6、8と、ころ10、12、14と、外歯歯車16、18、20と、第1キャリヤ部材26と、第2キャリヤ部材28と、ケーシング36と、主軸受38と、内歯歯車40と、を備える。
The
入力軸2は、例えばモータ等の回転駆動源に接続され、減速装置100(内歯歯車40)の回転軸Rを中心に回転する。入力軸2には、入力軸2と軸心のずれた3つの偏心体4、6、8が一体に形成されている。3つの偏心体4、6、8は、互いに120度の位相差を有して偏心している。なお、偏心体4、6、8は、入力軸2と別体で構成された上で、キー等によって入力軸2に固定されたものであってもよい。
The
各偏心体4、6、8の外周にはそれぞれ、ころ10、12、14を介して、3枚の外歯歯車16、18、20が揺動可能に外嵌されている。外歯歯車16、18、20にはそれぞれ、軸心からオフセットした位置に複数のオフセット貫通孔16a、18a、20aが形成されている。複数のオフセット貫通孔16a、18a、20aは、周方向に等間隔に形成されている。
Three
オフセット貫通孔16a、18a、20aには、内ピン22および内ピン22に外嵌された内ローラ24が軸方向に貫通される。内ローラ24とオフセット貫通孔16a、18a、20aとの間には、最大で偏心体4、6、8の偏心量の2倍に相当する隙間が確保されている。内ローラ24は、外周面24aが外歯歯車16、18、20のオフセット貫通孔16a、18a、20aと摺動可能に当接するとともに、内周面24bが内ピン22の外周面22aと摺動可能に当接している。
The inner pin 22 and the
第1キャリヤ部材26は、外歯歯車16、18、20の軸方向一方側(図1では右側)に配置されている。第1キャリヤ部材26は、ボルト30により内ピン22と締結されている。第2キャリヤ部材28は、外歯歯車16、18、20の軸方向他方側(図1では左側)に配置されている。本実施の形態では、第2キャリヤ部材28は、内ピン22と一体に形成される。したがって、第1キャリヤ部材26と第2キャリヤ部材28とは、内ピン22を介して連結されている。
The
第1キャリヤ部材26と入力軸2との間に軸受32が配置され、第2キャリヤ部材28と入力軸2との間に軸受34が配置される。第1キャリヤ部材26および第2キャリヤ部材28は、軸受32、34を介して入力軸2を回転自在に支持する。
A
ケーシング36は、略円筒状の部材であり、外歯歯車16、18、20、第1キャリヤ部材26および第2キャリヤ部材28を環囲する。ケーシング36と第2キャリヤ部材28との間には、主軸受38が配置される。ケーシング36と第2キャリヤ部材28は、主軸受38を介して相対回転可能に構成される。
The
内歯歯車40は、ケーシング36の内周面に形成されている。内歯歯車40は、外歯歯車16、18、20と内接噛合する。内歯歯車40は、ケーシング36の内周面に形成された等間隔のピン溝に円柱状の外ピンを嵌め込むことで構成される。なお、内歯歯車40をケーシング36の内周面に一体形成してもよい。内歯歯車40の内歯の歯数は、外歯歯車16、18、20の外歯の歯数よりも僅かに(例えば1だけ)多くされている。
The
ケーシング36と第2キャリヤ部材28との間には、オイルシール82が設けられる。これにより、減速装置100の内部が封止され、減速装置100内の潤滑剤が漏れるのが抑止される。
An
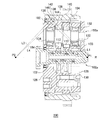
図2(a)〜(c)は、主軸受38を示す拡大断面図である。図2(a)は、テーパころ46の表示を省略した断面図であり、図2(b)は第1テーパころを含む断面図であり、図2(c)は第2テーパころを含む断面図である。図1に加えて図2を参照する。
2 (a) to 2 (c) are enlarged cross-sectional views showing the main bearing 38. FIG. 2A is a cross-sectional view in which the display of the tapered
主軸受38は、外輪42と、内輪44と、複数のテーパころ46と、を含む。外輪42は、ケーシング36の内周面に固定される。外輪42は、内周面に、回転軸Rを環囲するよう設けられる転走面42a、42bを有する。転走面42aは軸方向において第1キャリヤ部材側(図2では右側)に位置し、転走面42bは軸方向において第2キャリヤ部材側(図2では左側)に位置する。転走面42aと転走面42bとは、回転軸Rを環囲する環状のV溝を形成する。
The
内輪44は、第2キャリヤ部材28の外周面に固定される。内輪44は、外周面に、回転軸Rを環囲するよう設けられる転走面44a、44bを有する。転走面44aは軸方向において第1キャリヤ部材側に位置し、転走面44bは軸方向において第2キャリヤ部材側に位置する。転走面44aと転走面44bとは、回転軸Rを環囲する環状のV溝を形成する。
The
転走面42aと転走面44bは、回転軸Rを含む平面において、転走面44aに向かうほど互いに近づくよう構成される。転走面42aと転走面44bは特に、回転軸Rを含む平面において、転走面42aの延長線L1と転走面44bの延長線L2とが、回転軸R上またはその近傍で交わるよう形成される。以下、延長線L1と延長線L2の交点を第1交点P1と呼ぶ。
The rolling
転走面42bと転走面44aは、回転軸Rを含む平面において、転走面44bに向かうほど互いに近づくよう構成される。転走面42bと転走面44aは特に、回転軸Rを含む平面において、転走面42bの延長線L3と転走面44aの延長線L4とが、回転軸R上またはその近傍で交わるよう形成される。以下、延長線L3と延長線L4の交点を第2交点P2と呼ぶ。
The rolling
さらには、軸方向位置について、内歯歯車40と、外歯歯車16、18、20との噛み合い位置の少なくとも一部が、第1交点P1との第2交点P2との間に位置するよう構成される。好ましくは、図1に示すように、外輪42および内輪44は、軸方向位置について、内歯歯車40と、外歯歯車16、18、20との噛み合い位置の全体が、第1交点P1との第2交点P2との間に位置するよう構成される。
Further, with respect to the axial position, at least a part of the meshing position between the
また、軸方向位置について、外歯歯車16、18、20と内ローラ24との接触位置の少なくとも一部が、好ましくはその全部が、第1交点P1との第2交点P2との間に位置するよう構成される。
Further, with respect to the axial position, at least a part, preferably all of the contact positions between the
また、本実施の形態では、軸方向位置について、軸受32、34およびオイルシール82が、第1交点P1との第2交点P2との間に位置するよう構成される。
Further, in the present embodiment, the
複数のテーパころ46はそれぞれ、略円錐台形状を有する。複数のテーパころ46は、転走面42a、42b、44a、44bの間に配置される。具体的には、複数のテーパころ46は、図2(b)のごとく上底側端面(面積が狭い方の端面)46aが内輪44の転走面44aと対向するテーパころ46(以下、「第1テーパころ」と呼ぶ)と、図2(c)のごとく上底側端面46aが内輪44の転走面44bと対向するテーパころ46(以下、「第2テーパころ」と呼ぶ)とが、転走面42a、42b、44a、44bの間に、周方向に交互に並ぶよう配置される。第1テーパころは、転走面42aと転走面44bを転走し、第2テーパころは、転走面42bと内輪44の転走面44aを転走する。
Each of the plurality of tapered
以上のように構成された減速装置100の動作を説明する。ここでは、外歯歯車16、18、20と内歯歯車40との歯数差が1である場合を例に説明する。
The operation of the
入力軸2が回転すると、入力軸2と一体に形成された偏心体4、6、8が回転し、ころ10、12、14を介して外歯歯車16、18、20が揺動する。この揺動により、外歯歯車16、18、20と内歯歯車40の噛合位置が順次ずれてゆく現象が生じる。
When the
外歯歯車16、18、20の歯数は、内歯歯車40の歯数よりも1だけ少ないため、外歯歯車16、18、20は、入力軸2が1回回転するごとに、1歯分(すなわち歯数差に相当する分)だけ内歯歯車40に対して位相がずれる(自転する)ことになる。この自転成分は、外歯歯車16、18、20のオフセット貫通孔16a、18a、20aと内ローラ24との摺動、および内ローラ24の内周面24bと内ピン22の外周面22aとの摺動を介して内ピン22に伝達され、内ピン22と一体に形成された第2キャリヤ部材28が1/(内歯歯車の歯数)に減速された回転速度にてケーシング36に対して相対回転する。したがって、ケーシング36が固定されている場合は第2キャリヤ部材28が回転し、第2キャリヤ部材28が固定されている場合はケーシング36が回転する。
Since the number of teeth of the
以上説明した第1の実施の形態に係る減速装置100によれば、主軸受38は、従来のクロスローラ軸受とは異なり、テーパころ46が円錐台形状を有する。この場合、テーパころ46は、外輪42と内輪44との間を転がりながら移動する。そのため、主軸受38に内部予圧を与えても回転トルクが飛躍的に高くなったり、すべりによる著しい寿命低下の問題は生じない。したがって、主軸受38に内部予圧を与えることができ、モーメント剛性を高めることができる。つまり、小型でありながらも主軸受のモーメント剛性の高い減速装置100を実現できる。
According to the
また、減速装置100によれば、軸方向位置について、第1交点P1と第2交点P2の間に、内歯歯車40と外歯歯車16、18、20との噛み合い部の少なくとも一部が位置する。また、軸方向位置について、第1交点P1と第2交点P2の間に、外歯歯車16、18、20と内ローラ24との接触位置の少なくとも一部が位置する。ここで、第1交点P1および第2交点P2は、モーメント荷重の作用点であり、軸方向について、それらの間にモーメント荷重の影響を大きく受ける出力の取り出し部分が位置するようにすることで、モーメント荷重が噛み合いに与える影響を最小限に抑えることができる。
Further, according to the
また、減速装置100によれば、軸方向位置について、第1交点P1と第2交点P2の間に軸受32、34が位置する。また、軸方向位置について、第1交点P1と第2交点P2の間にオイルシール82が位置する。これにより、モーメント荷重が軸受32、34やオイルシール82に与える影響を最小限に抑えることができる
Further, according to the
(第2の実施の形態)
図3は、第2の実施の形態に係る減速装置200を示す断面図である。減速装置200は、振り分けタイプの偏心揺動型の減速装置である。
(Second Embodiment)
FIG. 3 is a cross-sectional view showing a
減速装置200は、入力軸102と、偏心体104、106と、ころ110、112と、外歯歯車116、118と、第1キャリヤ部材126と、第2キャリヤ部材128と、ケーシング136と、主軸受138と、内歯歯車140と、偏心体軸歯車150と、偏心体軸152と、を備える。
The
偏心体軸152は、減速装置200(内歯歯車140)の回転軸Rの周りに等間隔に複数(例えば3本)設けられる。各偏心体軸152は、入力軸102と平行に配置される。
A plurality (for example, three) of
入力軸102は、例えばモータ等の回転駆動源に接続され、回転軸Rを中心に回転する。入力軸102の先端には、入力ピニオン102aが形成されており、偏心体軸152と同数の偏心体軸歯車150が入力ピニオン102aに噛合している。複数の偏心体軸歯車150はそれぞれ、対応する偏心体軸152の端部に形成されたスプライン152aとスプライン結合されるとともに、止め輪(不図示)によって軸方向の移動が規制されている。
The
偏心体軸152には、偏心体軸152と軸心のずれた2つの偏心体104、106が一体に形成されている。2つの偏心体104、106は、互いに180度の位相差を有して偏心している。複数(例えば3本)の偏心体軸152は、それぞれの偏心体104、106の偏心方向が互いに一致するように組み付けられる。なお、偏心体104、106は、偏心体軸152と別体で構成された上で、キー等によって偏心体軸152に固定されたものであってもよい。
The
各偏心体104、106の外周にはそれぞれ、ころ110、112を介して、2枚の外歯歯車116、118が揺動可能に外嵌されている。外歯歯車116、118にはそれぞれ、軸心からオフセットした位置に、複数の第1貫通孔116a、118aと複数の第2貫通孔116b、118bが形成されている。複数の第1貫通孔116a、118aは、周方向に等間隔に形成されており、偏心体軸152が貫通する。第2貫通孔116b、118bは、周方向に等間隔に形成されており、第2キャリヤ部材128の凸部128a(後述)が貫通する。
Two external gears 116 and 118 are swingably fitted on the outer circumferences of the
第1キャリヤ部材126は、略円板形状を有し、外歯歯車116、118の軸方向一方側(図3では右側)に配置されている。第2キャリヤ部材128は、外歯歯車116、118の軸方向他方側(図3では左側)に配置されている。
The
第2キャリヤ部材128には、外歯歯車116、118の第2貫通孔116b、118bに隙間を有した状態で挿通され、第1キャリヤ部材126側に向けて軸方向に延びる複数の凸部(柱部)128aが周方向に等間隔に設けられている。第1キャリヤ部材126と第2キャリヤ部材128の凸部128aの先端部は、ボルト130により締結される。これにより、第1キャリヤ部材126と第2キャリヤ部材128は、一体的に回転する。
The
第1キャリヤ部材126と偏心体軸152との間に軸受132が配置され、第2キャリヤ部材128と入力軸2との間に軸受134が配置される。第1キャリヤ部材126および第2キャリヤ部材128は、軸受132、134を介して、偏心体軸152を回転自在に支持する。
The
ケーシング136は、略円筒状の部材であり、外歯歯車116、118、第1キャリヤ部材126および第2キャリヤ部材128を環囲する。ケーシング136と第2キャリヤ部材128との間には、主軸受138が配置される。ケーシング36と第2キャリヤ部材128は、主軸受138を介して相対回転可能に構成される。
The
内歯歯車140は、ケーシング136の内周面に形成されている。内歯歯車140は、外歯歯車116、118と内接噛合する。内歯歯車140は、ケーシング136の内周面に形成された等間隔のピン溝に円柱状の外ピンを嵌め込むことで構成される。なお、内歯歯車140をケーシング136の内周面に一体形成してもよい。内歯歯車140の内歯の歯数は、外歯歯車116、118の外歯の歯数よりも僅かに(例えば1だけ)多くされている。
The
ケーシング136と第2キャリヤ部材128との間にオイルシール182が設けられ、第2キャリヤ部材128と入力軸102との間にオイルシール184が設けられる。これにより、減速装置200の内部が封止され、減速装置200内の潤滑剤が漏れるのが抑止される。
An
主軸受138は、外輪142と、内輪144と、複数のテーパころ146と、を含む。外輪142、内輪144、テーパころ146はそれぞれ、外輪42、内輪44、テーパころ46と同様に構成される。
The
本実施の形態では、軸方向位置について、内歯歯車140と、外歯歯車116、118との噛み合い位置の少なくとも一部が、好ましくは噛み合い位置の全部が、第1交点P1と第2交点P2との間に位置するよう構成される。また、軸方向位置について、外歯歯車116と、第2キャリヤ部材128の凸部128aとの接触位置の少なくとも一部、好ましくは全部が、第1交点P1との第2交点P2との間に位置するよう構成される。また、軸方向位置について、入力軸102の入力軸102と偏心体軸歯車150との噛み合い位置の少なくとも一部が、好ましくは噛み合い位置の全部が、第1交点P1と第2交点P2との間に位置するよう構成される。また、外輪142および内輪144は、軸方向位置について、軸受132、134およびオイルシール182、184が、第1交点P1との第2交点P2との間に位置するよう形成される。
In the present embodiment, with respect to the axial position, at least a part of the meshing positions of the
以上のように構成された減速装置200の動作を説明する。ここでは、外歯歯車116、118と内歯歯車140との歯数差が1である場合を例に説明する。
The operation of the
入力軸102が回転すると、入力軸102の入力ピニオン102aに噛合している複数の偏心体軸歯車150が回転(自転)し、複数の偏心体軸歯車150のそれぞれに連結されている偏心体軸152が回転(自転)する。
When the
偏心体軸152が回転すると、入力軸2と一体に形成された偏心体104、106が回転し、ころ110、112を介して外歯歯車116、118が揺動する。この揺動により、外歯歯車116、118と内歯歯車140の噛合位置が順次ずれてゆく現象が生じる。
When the
外歯歯車116、118の歯数は、内歯歯車140の歯数よりも1だけ少ないため、外歯歯車116、118は、偏心体軸152が1回回転するごとに、1歯分(すなわち歯数差に相当する分)だけ内歯歯車140に対して位相がずれる(自転する)ことになる。この結果、偏心体軸152が回転軸Rの周りを公転し、偏心体軸152を支持している第1キャリヤ部材126、第2キャリヤ部材128がケーシング136に対して相対的に回転する。したがって、ケーシング136が固定されている場合は第2キャリヤ部材128が回転し、第2キャリヤ部材128が固定されている場合はケーシング136が回転する。
Since the number of teeth of the external gears 116 and 118 is one less than the number of teeth of the
以上説明した第2の実施の形態に係る減速装置200によれば、第1の実施の形態に係る減速装置100と同様に、主軸受138に内部予圧を与えることができ、モーメント剛性を高めることができる。つまり、小型でありながらも主軸受のモーメント剛性の高い減速装置200を実現できる。
According to the
また、減速装置200によれば、第1の実施の形態に係る減速装置100と同様に、軸方向位置について、第1交点P1と第2交点P2との間にモーメント荷重の影響を大きく受ける出力の取り出し部分が位置するようにすることで、モーメント荷重が噛み合いに与える影響を最小限に抑えることができる。
Further, according to the
また、減速装置200によれば、第1の実施の形態に係る減速装置100と同様に、軸方向位置について、第1交点P1と第2交点P2との間に軸受やオイルシールが位置するようにすることで、モーメント荷重がこれらに与える影響を最小限に抑えることができる。
Further, according to the
(第3の実施の形態)
図4は、第3の実施の形態に係る減速装置300を示す断面図である。減速装置300は、フラットタイプの撓み噛合い式の減速装置である。
(Third Embodiment)
FIG. 4 is a cross-sectional view showing a
減速装置300は、波動発生器260と、外歯歯車216と、内歯歯車240と、キャリヤ部材226と、ケーシング236と、主軸受238と、第1軸受ハウジング272と、第2軸受ハウジング274と、を備える。
The
波動発生器260は、入力軸202と、複数の第1転動体262aと、複数の第2転動体262bと、第1保持器264aと、第2保持器264bと、第1外輪部材266aと、第2外輪部材266bとを含む。入力軸202は、例えばモータ等の回転駆動源に接続され、減速装置300(内歯歯車240)の回転軸Rを中心に回転する。入力軸202には、回転軸Rに直交する断面が略楕円形状である起振体202aが一体に形成されている。
The
複数の第1転動体262aはそれぞれ、略円柱形状を有し、軸方向が回転軸R方向と略平行な方向を向いた状態で周方向に間隔を空けて設けられる。第1転動体262aは、第1保持器264aにより転動自在に保持され、起振体202aの外周面202bを転走する。第2転動体262bは、第1転動体262aと同様に構成される。複数の第2転動体262bは、第1保持器264aと軸方向に並ぶように配置された第2保持器264bにより転動自在に保持され、起振体202aの外周面202bを転走する。以降では、第1転動体262aと第2転動体262bとをまとめて「転動体262」とも呼ぶ。また、第1保持器264aと第2保持器264bとをまとめて「保持器264」とも呼ぶ
Each of the plurality of first
第1外輪部材266aは、複数の第1転動体262aを環囲する。第1外輪部材266aは、可撓性を有し、複数の第1転動体262aを介して起振体202aにより楕円状に撓められる。第1外輪部材266aは、起振体202a(すなわち入力軸202)が回転すると、起振体202aの形状に合わせて連続的に変形する。第2外輪部材266bは、第1外輪部材266aと同様に構成される。第2外輪部材266bは、第1外輪部材266aとは別体として形成される。なお、第2外輪部材266bは、第1外輪部材266aと一体に形成されてもよい。以降では、第1外輪部材266aと第2外輪部材266bとをまとめて「外輪部材266」とも呼ぶ。
The first
外歯歯車216は、可撓性を有する環状の部材であり、その内側には起振体202a、転動体262および外輪部材266が嵌まる。これにより、外歯歯車216は、楕円状に撓められる。外歯歯車216は、起振体202aが回転すると、起振体202aの形状に合わせて連続的に変形する。外歯歯車216は、第1外歯部216aと、第2外歯部216bと、基材216cと、を含む。第1外歯部216aと第2外歯部216bとは単一の基材である基材216cに形成されており、同歯数である。
The external tooth gear 216 is a flexible annular member, and a vibrating
内歯歯車240は、剛性を有する環状の部材である。内歯歯車240の第1内歯部240aは、楕円状に撓められた外歯歯車216の第1外歯部216aを環囲し、起振体202aの長軸近傍の所定領域で第1外歯部216aと噛み合う。第1内歯部240aは、第1外歯部216aよりも多くの歯を有する。
The
キャリヤ部材226は、剛性を有する円筒状の部材である。本実施の形態では、キャリヤ部材226の内周面に第2内歯部226aが形成されている。キャリヤ部材226の第2内歯部226aは、楕円状に撓められた外歯歯車216の第2外歯部216bを環囲し、起振体202aの長軸方向の2領域で第2外歯部216bと噛み合う。第2内歯部226aは、第2外歯部216bと同数の歯を有する。したがって、キャリヤ部材226は、第2外歯部216bひいては外歯歯車216の自転と同期して回転する。
The
ケーシング236は、略円筒状の部材であり、キャリヤ部材226を環囲する。ケーシング236には、内歯歯車240がインロー嵌合により連結されて一体化される。ケーシング236とキャリヤ部材226は、主軸受238を介して相対回転可能に構成される。
The
第1軸受ハウジング272は、環状の部材であり、入力軸202を環囲する。同様に、第2軸受ハウジング274は、環状の部材であり、入力軸202を環囲する。第1軸受ハウジング272と第2軸受ハウジング274とは、外歯歯車216および内歯歯車240を軸方向に挟むよう配置される。第1軸受ハウジング272は、インロー嵌合により内歯歯車240に連結される。第2軸受ハウジング274は、インロー嵌合によりキャリヤ部材226に連結される。
The
第1軸受ハウジング272には軸受232が組み込まれ、第2軸受ハウジング274には軸受234が組み込まれている。そして、第1軸受ハウジング272および第2軸受ハウジング274は、軸受232、234を介して、入力軸202を回転自在に支持する。
The
入力軸202と第1軸受ハウジング272の間にはオイルシール282が配置され、ケーシング236とキャリヤ部材226との間にはオイルシール284が配置され、第2軸受ハウジング274と入力軸202との間にはオイルシール286が配置される。また、第1軸受ハウジング272と内歯歯車240の間にはOリング288が配置され、内歯歯車240とケーシング236との間にはOリング290が配置され、キャリヤ部材226と第2軸受ハウジング274との間にはOリング292が配置される。これらにより、減速装置300内の潤滑剤が漏れるのを抑止できる。
An
主軸受238は、外輪242と、内輪244と、複数のテーパころ246と、を含む。本実施の形態では、外輪242は、ケーシング236の内周面側にケーシング236と一体に形成され、内輪244は、キャリヤ部材226の外周面にキャリヤ部材226と一体に形成される。外輪242、内輪244、テーパころ246はそれぞれ、外輪42、内輪44、テーパころ46と同様に構成される。
The
本実施の形態では、軸方向位置について、内歯歯車240の第1内歯部240aおよびキャリヤ部材226の第2内歯部226aと、外歯歯車216との噛み合い位置の少なくとも一部が、好ましくは噛み合い位置の全部が、第1交点P1と第2交点P2との間に位置するよう構成される。また、軸方向位置について、軸受232、234、オイルシール282、284、286が、第1交点P1との第2交点P2との間に位置するよう構成される。
In the present embodiment, with respect to the axial position, at least a part of the meshing position between the first
以上のように構成された減速装置300の動作を説明する。ここでは、第1外歯部216aの歯数が100、第2外歯部216bの歯数が100、第1内歯部240aの歯数が102、第2内歯部226aの歯数が100の場合を例に説明する。また、内歯歯車240および第1軸受ハウジング272が固定状態にある場合を例に説明する。
The operation of the
第1外歯部216aが楕円形状の長軸方向の2箇所で第1内歯部240aと噛み合っている状態で、入力軸202が回転すると、これに伴って第1外歯部216aと第1内歯部240aとの噛み合い位置も周方向に移動する。第1外歯部216aと第1内歯部240aとは歯数が異なるため、この際、第1内歯部240aに対して第1外歯部216aが相対的に回転する。内歯歯車240および第1軸受ハウジング272が固定状態にあるため、第1外歯部216aは、歯数差に相当する分だけ自転することになる。つまり、入力軸202の回転が大幅に減速されて第1外歯部216aに出力される。その減速比は以下のようになる。
減速比=(第1外歯部216aの歯数−第1内歯部240aの歯数)/第1外歯部216aの歯数
=(100−102)/100
=−1/50
When the
Reduction ratio = (number of teeth of the first
= -1/50
第2外歯部216bは、第1外歯部216aと一体的に形成されているため、第1外歯部216aと一体に回転する。第2外歯部216bと第2内歯部226aは歯数が同一であるため、相対回転は発生せず、第2外歯部216bと第2内歯部8aとは一体に回転する。このため、第1外歯部216aの自転と同一の回転が第2内歯部226aすなわちキャリヤ部材226に出力される。結果として、キャリヤ部材226からは入力軸202の回転を−1/50に減速した出力を取り出すことができる。
Since the second
以上説明した第3の実施の形態に係る減速装置300によれば、第1の実施の形態に係る減速装置100と同様に、主軸受238に内部予圧を与えることができ、モーメント剛性を高めることができる。つまり、小型でありながらも主軸受のモーメント剛性の高い減速装置300を実現できる。
According to the
また、減速装置300によれば、第1の実施の形態に係る減速装置100と同様に、軸方向位置について、第1交点P1と第2交点P2との間にモーメント荷重の影響を大きく受ける出力の取り出し部分が位置するようにすることで、モーメント荷重が噛み合いに与える影響を最小限に抑えることができる。
Further, according to the
また、減速装置300によれば、第1の実施の形態に係る減速装置100と同様に、軸方向位置について、第1交点P1と第2交点P2との間に軸受やオイルシールやOリングが位置するようにすることで、モーメント荷重がこれらに与える影響を最小限に抑えることができる。
Further, according to the
(第4の実施の形態)
図5は、第4の実施の形態に係る減速装置400を示す断面図である。減速装置400は、シルクハットタイプの撓み噛合い式の減速装置である。
(Fourth Embodiment)
FIG. 5 is a cross-sectional view showing a
減速装置400は、波動発生器360と、外歯歯車316と、内歯歯車340と、キャリヤ部材326と、ケーシング336と、主軸受338と、第1軸受ハウジング372と、第2軸受ハウジング374と、を備える。
The
波動発生器360は、入力軸302と、内輪部材368と、複数の転動体362と、外輪部材366とを含む。入力軸302は、例えばモータ等の回転駆動源に接続され、減速装置400(内歯歯車340)の回転軸Rを中心に回転する。入力軸302には、回転軸Rに直交する断面が略楕円形状である起振体302aが一体に形成されている。
The
内輪部材368は、環状の部材であり、起振体302aに外嵌する。内輪部材368は特に、接着または圧入により起振体302aに固定され、起振体302aと一体に回転する。内輪部材368の外周面368aは、転動体362が転走する転走面として機能する。なお、内輪部材368は、起振体302aと一体に形成されてもよい。
The
複数の転動体362はそれぞれ、略球形状を有し、周方向に間隔を空けて設けられる。転動体362は、不図示の保持器により転動自在に保持される。
Each of the plurality of rolling
外輪部材366は、複数の転動体362を環囲する。外輪部材366は、可撓性を有し、複数の転動体362を介して起振体302aにより楕円状に撓められる。外輪部材366は、起振体302a(すなわち入力軸302)が回転すると、起振体302aの形状に合わせて連続的に変形する。
The outer ring member 366 surrounds a plurality of rolling
外歯歯車316は、可撓性を有するシルクハット形状の部材であり、円筒状の胴部316dと、胴部316dの軸方向一方側(図5では右側)の外周に設けられる外歯部316aと、胴部316dの軸方向他端側(図5では左側)の端部から径方向外側に突出する張出部316eと、を含む。胴部316dには、起振体302a、転動体362および外輪部材366が嵌まる。これにより、胴部316dおよび外歯部316aは、楕円状に撓められる。胴部316dおよび外歯部316aは、起振体302aが回転すると、起振体302aの形状に合わせて連続的に変形する。
The
内歯歯車340は、剛性を有する環状の部材である。内歯歯車340の内歯部340aは、楕円状に撓められた外歯歯車316の外歯部316aを環囲し、起振体302aの長軸近傍の所定領域で外歯部316aと噛み合う。内歯部340aは、外歯部316aよりも多くの歯を有する。
The
ケーシング336は、略円筒状の部材であり、外歯歯車316の胴部316dの軸方向他方側を環囲する。ケーシング336には、内歯歯車340がインロー嵌合により連結されて一体化される。
The
キャリヤ部材326は、剛性を有する円筒状の部材であり、ケーシング336を環囲する。キャリヤ部材326は、不図示のボルトにより、第2軸受ハウジング374とともに外歯歯車316の張出部316eに固定される。したがって、キャリヤ部材326は、外歯歯車316との自転と同期して回転する。
The
ケーシング336とキャリヤ部材326とは、主軸受338を介して相対回転可能に構成される。
The
第1軸受ハウジング372は、環状の部材であり、入力軸302を環囲する。同様に、第2軸受ハウジング374は、環状の部材であり、入力軸302を環囲する。第1軸受ハウジング372と第2軸受ハウジング374とは、外歯歯車316および内歯歯車340を軸方向に挟むよう配置される。第1軸受ハウジング372は、インロー嵌合により内歯歯車340に連結される。また、第2軸受ハウジング374は、上述のように不図示のボルトにより、外歯歯車316の張出部316eに固定される。
The
第1軸受ハウジング372には軸受332が組み込まれ、第2軸受ハウジング374には軸受334が組み込まれている。そして、第1軸受ハウジング372および第2軸受ハウジング374は、軸受332、334を介して、入力軸302を回転自在に支持する。
A
入力軸302と第1軸受ハウジング372の間にはオイルシール382が配置され、キャリヤ部材326とケーシング336との間にはオイルシール384が配置され、第2軸受ハウジング374と入力軸302との間にはオイルシール386が配置される。これらにより、減速装置400内の潤滑剤が漏れるのを抑止できる。
An
主軸受338は、外輪342と、内輪344と、複数のテーパころ346と、を含む。本実施の形態では、外輪342は、キャリヤ部材326の内周面側にキャリヤ部材326と一体に形成され、内輪344は、ケーシング336の外周側にケーシング336と一体に形成される。外輪342、内輪344、テーパころ346はそれぞれ、外輪42、内輪44、テーパころ46と同様に構成される。
The
本実施の形態では、外輪342および内輪344は、軸方向位置について、内歯歯車340の内歯部340aと、外歯歯車316の外歯部316aとの噛み合い位置の少なくとも一部が、好ましくは噛み合い位置の全部が、第1交点P1と第2交点P2との間に位置するよう形成される。また、外輪342および内輪344は、軸方向位置について、軸受332、334、オイルシール382、384、386が、第1交点P1との第2交点P2との間に位置するよう形成される。
In the present embodiment, the
以上のように構成された減速装置400の動作を説明する。ここでは、外歯部316aの歯数が100、内歯部340aの歯数が102の場合を例に説明する。また、内歯歯車340および第1軸受ハウジング372が固定状態にある場合を例に説明する。
The operation of the
外歯部316aが楕円形状の長軸方向の2箇所で内歯部340aと噛み合っている状態で、入力軸302が回転すると、これに伴って外歯部316aと内歯部340aとの噛み合い位置も周方向に移動する。外歯部316aと内歯部340aとは歯数が異なるため、この際、内歯部340aに対して外歯部316aが相対的に回転する。内歯歯車340および第1軸受ハウジング372が固定状態にあるため、外歯部316aひいては外歯歯車316は、歯数差に相当する分だけ自転することになる。キャリヤ部材326は、外歯歯車316と連結されているため、外歯歯車316の自転と同一の回転がキャリヤ部材326に出力される。結果として、キャリヤ部材326からは入力軸302の回転が大幅に減速されてキャリヤ部材326に出力される。
When the
以上説明した第4の実施の形態に係る減速装置400によれば、第1の実施の形態に係る減速装置100と同様に、主軸受338に内部予圧を与えることができ、モーメント剛性を高めることができる。つまり、小型でありながらも主軸受のモーメント剛性の高い減速装置300を実現できる。
According to the
また、減速装置400によれば、第1の実施の形態に係る減速装置100と同様に、軸方向位置について、第1交点P1と第2交点P2との間にモーメント荷重の影響を大きく受ける出力の取り出し部分が位置するようにすることで、モーメント荷重が噛み合いに与える影響を最小限に抑えることができる。
Further, according to the
また、減速装置400によれば、第1の実施の形態に係る減速装置100と同様に、軸方向位置について、第1交点P1と第2交点P2との間に軸受やオイルシールが位置するようにすることで、モーメント荷重がこれらに与える影響を最小限に抑えることができる。
Further, according to the
以上、実施の形態に係る減速装置について説明した。これらの実施の形態は例示であり、それらの各構成要素や各処理プロセスの組合せにいろいろな変形例が可能なこと、またそうした変形例も本発明の範囲にあることは当業者に理解されるところである。以下変形例を示す。 The speed reduction device according to the embodiment has been described above. It will be appreciated by those skilled in the art that these embodiments are exemplary and that various modifications are possible for each of these components and combinations of processing processes, and that such modifications are also within the scope of the present invention. By the way. A modified example is shown below.
(変形例1)
第3の実施の形態では、2つの内歯部(第1内歯部240a、第2内歯部226a)を有し、外歯歯車216が筒型であるフラット型の撓み噛合い式の減速装置について説明した。また第4の実施の形態では、1つの内歯部340aを有し、外歯歯車316がシルクハット形状であるシルクハットタイプの撓み噛合い式の減速装置について説明した。しかしながら、これに限られず、第1〜4の実施の形態の技術思想は、内歯歯車が1つで外歯歯車がカップ形状であるカップタイプの撓み噛合い式の減速装置についても適用できる。
(Modification example 1)
In the third embodiment, there are two internal tooth portions (first
また、実施の形態では特に言及しなかったが、第1〜4の実施の形態の技術思想は、単純遊星歯車機構を用いた減速装置についても適用できる。 Further, although not particularly mentioned in the embodiment, the technical idea of the first to fourth embodiments can be applied to a reduction gear using a simple planetary gear mechanism.
上述した実施の形態と変形例の任意の組み合わせもまた本発明の実施の形態として有用である。組み合わせによって生じる新たな実施の形態は、組み合わされる実施の形態および変形例それぞれの効果をあわせもつ。 Any combination of the embodiments and modifications described above is also useful as an embodiment of the present invention. The new embodiments resulting from the combination have the effects of the combined embodiments and variants.
また、請求項に記載の各構成要件が果たすべき機能は、実施の形態および変形例において示された各構成要素の単体もしくはそれらの連係によって実現されることも当業者には理解されるところである。例えば、請求項に記載のカム軸とカム軸受は、第1の実施の形態に記載の偏心体4、6、8が一体形成された入力軸2と軸受32、34によって実現されてもよく、第2の実施の形態に記載の偏心体104、106が一体形成された偏心体軸152と軸受132、134によって実現されてもよく、第3の実施の形態に記載の起振体202aが一体に形成された入力軸202と軸受232、234によって実現されてもよく、第4の実施の形態に記載の起振体302aが一体に形成された入力軸302と軸受332、334によって実現されてもよい。
It is also understood by those skilled in the art that the functions to be fulfilled by each of the constituent elements described in the claims are realized by a single component or a combination thereof shown in the embodiments and modifications. .. For example, the cam shaft and the cam bearing according to the claim may be realized by the
また例えば、請求項に記載の駆動歯車と入力歯車は、第2の実施の形態の入力軸102に形成された入力ピニオン102aと偏心体軸歯車150によって実現されてもよい。
Further, for example, the drive gear and the input gear according to the claim may be realized by the
16,18,20 外歯歯車、 36 ケーシング、 38 主軸受、 40 内歯歯車、 42 外輪、 42a,42b 転走面、 44 内輪、 44a,44b 転走面、 46 テーパころ、 100 減速装置。 16, 18, 20 External gear, 36 Casing, 38 Main bearing, 40 Internal gear, 42 Outer ring, 42a, 42b Rolling surface, 44 Inner ring, 44a, 44b Rolling surface, 46 Tapered roller, 100 Reducer.
Claims (5)
前記主軸受は、前記ケーシングおよび前記キャリヤ部材の一方に設けられた外輪と、前記ケーシングおよび前記キャリヤ部材の他方に設けられた内輪と、前記外輪と前記内輪との間に配置される複数のテーパころと、を有し、
前記複数のテーパころは、第1テーパころと、前記第1テーパころとは異なる転走面を転走する第2テーパころと、が周方向に交互に配置され、
前記内歯歯車と前記外歯歯車の噛合い部の少なくとも一部が、前記外輪における前記第1テーパころの転走面と前記内輪における前記第1テーパころの転走面の同一平面上における延長線の交点である第1交点と、前記外輪における前記第2テーパころの転走面と前記内輪における前記第2テーパころの転走面の同一平面上における延長線の交点である第2交点との間に位置することを特徴とする減速装置。 The casing, the internal gear provided in the casing, the external gear that meshes with the internal gear, the carrier member that synchronizes with the rotation component or the revolution component of the external gear, and the casing and the carrier member. It is a reduction gear equipped with a main bearing arranged between the two.
The main bearing has an outer ring provided on one of the casing and the carrier member, an inner ring provided on the other of the casing and the carrier member, and a plurality of tapers arranged between the outer ring and the inner ring. With a roller,
In the plurality of tapered rollers, the first tapered roller and the second tapered roller that rolls on a rolling surface different from the first tapered roller are alternately arranged in the circumferential direction.
At least a part of the meshing portion between the internal gear and the external gear is an extension of the rolling surface of the first tapered roller in the outer ring and the rolling surface of the first tapered roller in the inner ring on the same plane. The first intersection, which is the intersection of the lines, and the second intersection, which is the intersection of the extension lines on the same plane of the rolling surface of the second tapered roller in the outer ring and the rolling surface of the second tapered roller in the inner ring. A speed reducer characterized by being located between.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016236080A JP6941936B2 (en) | 2016-12-05 | 2016-12-05 | Decelerator |
| KR1020170155757A KR102381750B1 (en) | 2016-12-05 | 2017-11-21 | Reducer device |
| DE102017128635.7A DE102017128635A1 (en) | 2016-12-05 | 2017-12-01 | Reduction gear |
| CN201711259815.1A CN108150613B (en) | 2016-12-05 | 2017-12-04 | Speed reducer |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016236080A JP6941936B2 (en) | 2016-12-05 | 2016-12-05 | Decelerator |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018091427A JP2018091427A (en) | 2018-06-14 |
| JP6941936B2 true JP6941936B2 (en) | 2021-09-29 |
Family
ID=62163986
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016236080A Active JP6941936B2 (en) | 2016-12-05 | 2016-12-05 | Decelerator |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP6941936B2 (en) |
| KR (1) | KR102381750B1 (en) |
| CN (1) | CN108150613B (en) |
| DE (1) | DE102017128635A1 (en) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3483473A1 (en) | 2017-11-14 | 2019-05-15 | Kimex Group s.r.o. | Gearbox |
| DE102017126737A1 (en) * | 2017-11-14 | 2019-05-16 | Kimex Group s.r.o. | transmission |
| WO2020004005A1 (en) * | 2018-06-28 | 2020-01-02 | 住友重機械工業株式会社 | Speed reduction device |
| JP2021067305A (en) * | 2019-10-21 | 2021-04-30 | 住友重機械工業株式会社 | Eccentric oscillation type speed reduction device |
| CN111022608B (en) * | 2019-11-25 | 2021-06-08 | 燕山大学 | Two-stage sine hammer-shaped roller oscillating tooth speed reducer |
| JP2021139427A (en) * | 2020-03-04 | 2021-09-16 | 住友重機械工業株式会社 | Speed reducing device, and method of assembling joint structure of robot |
| KR102456472B1 (en) * | 2021-01-26 | 2022-10-20 | 주식회사 에스 피 지 | Strain wave gear device |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR811217A (en) * | 1935-09-23 | 1937-04-09 | Roller bearing | |
| FR2615575B1 (en) * | 1987-05-22 | 1994-01-14 | Glaenzer Spicer | BEARING WITH INTERSECREED TAPERED ROLLERS, AND APPLICATION TO A MOTOR HUB |
| JP4187331B2 (en) * | 1998-12-22 | 2008-11-26 | 株式会社ハーモニック・ドライブ・システムズ | Cross roller bearing |
| JP4390124B2 (en) * | 2001-05-22 | 2009-12-24 | 株式会社ハーモニック・ドライブ・システムズ | Lightweight bearing manufacturing method |
| JP2004308716A (en) * | 2003-04-03 | 2004-11-04 | Nsk Ltd | Bearing unit |
| JP2009250279A (en) | 2008-04-02 | 2009-10-29 | Sumitomo Heavy Ind Ltd | Reduction device |
| JP5130184B2 (en) * | 2008-10-24 | 2013-01-30 | 住友重機械工業株式会社 | Reducer with rotation detector |
| CN202326709U (en) * | 2011-11-30 | 2012-07-11 | 瓦房店摩士瑞昌轴承制造有限公司 | Outer tooth crossed roller type rotary supporting bearing |
| JP5496426B1 (en) * | 2012-12-12 | 2014-05-21 | 株式会社ハーモニック・ドライブ・システムズ | Wave gear unit with input bearing |
| US9377096B2 (en) * | 2013-05-08 | 2016-06-28 | Harmonic Drive Systems Inc. | Wave generator of strain wave gearing |
| CN104285076A (en) * | 2013-05-08 | 2015-01-14 | 谐波传动系统有限公司 | Wave generator of strain wave gear device |
| JP5839524B2 (en) * | 2013-06-20 | 2016-01-06 | 株式会社ハーモニック・ドライブ・システムズ | Hollow wave gear unit |
| KR101646904B1 (en) * | 2013-06-20 | 2016-08-09 | 가부시키가이샤 하모닉 드라이브 시스템즈 | Strain wave gearing |
| WO2014203295A1 (en) * | 2013-06-20 | 2014-12-24 | 株式会社ハーモニック・ドライブ・システムズ | Bearing holder, bearing mechanism, and strain wave gearing device |
-
2016
- 2016-12-05 JP JP2016236080A patent/JP6941936B2/en active Active
-
2017
- 2017-11-21 KR KR1020170155757A patent/KR102381750B1/en active IP Right Grant
- 2017-12-01 DE DE102017128635.7A patent/DE102017128635A1/en not_active Ceased
- 2017-12-04 CN CN201711259815.1A patent/CN108150613B/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| DE102017128635A1 (en) | 2018-06-07 |
| CN108150613A (en) | 2018-06-12 |
| KR102381750B1 (en) | 2022-03-31 |
| CN108150613B (en) | 2021-12-31 |
| JP2018091427A (en) | 2018-06-14 |
| KR20180064288A (en) | 2018-06-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6941936B2 (en) | Decelerator | |
| KR102410231B1 (en) | Reducer device | |
| EP2068038B1 (en) | Reduction gear | |
| JP6789689B2 (en) | Decelerator | |
| JP6932068B2 (en) | Eccentric swing type gear device | |
| JP6685885B2 (en) | Flexible mesh gear | |
| JP2012057661A (en) | Oscillation inscribed meshing type planetary gear device and method for manufacturing the same | |
| JP2010091073A (en) | Eccentric oscillation type gear device | |
| JP7186171B2 (en) | flexural mesh gearbox | |
| JP2017044319A (en) | Eccentric oscillation type gear device and industrial robot | |
| CN108425999A (en) | Rolling bearing driver | |
| JP7506967B2 (en) | Gear Unit | |
| JP7068102B2 (en) | Hypocycloid reducer | |
| JP2019027519A (en) | Wave gear device | |
| JP7175084B2 (en) | flexural mesh gearbox | |
| JP2017025971A (en) | Reduction gear | |
| JP6563778B2 (en) | Planetary gear set | |
| JP7033995B2 (en) | Gear device | |
| JP7210581B2 (en) | reduction gear | |
| JP7554043B2 (en) | Gearbox | |
| JP6890563B2 (en) | Eccentric swing type speed reducer | |
| WO2019181965A1 (en) | Reduction gear and method for manufacturing reduction gear series | |
| JP6573788B2 (en) | Gear device | |
| JP6507605B2 (en) | Differential gear transmission | |
| JP6791464B1 (en) | Speed reducer and industrial robot |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190520 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200317 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200319 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200915 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20201214 |
|
| C22 | Notice of designation (change) of administrative judge |
Free format text: JAPANESE INTERMEDIATE CODE: C22 Effective date: 20210601 |
|
| C23 | Notice of termination of proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C23 Effective date: 20210803 |
|
| C03 | Trial/appeal decision taken |
Free format text: JAPANESE INTERMEDIATE CODE: C03 Effective date: 20210907 |
|
| C30A | Notification sent |
Free format text: JAPANESE INTERMEDIATE CODE: C3012 Effective date: 20210907 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210907 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6941936 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |