以下、本発明の実施形態を図面に基づいて説明する。
〔トラクタの基本構成〕
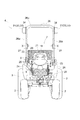
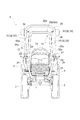
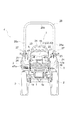
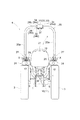
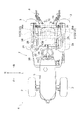
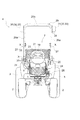
図1〜図4に、本発明に係るトラクタが示されている。この実施形態では、図1,2に記載した符号Fで示す方向がトラクタの前側であり、符号Bで示す方向がトラクタの後側である。又、図2に記載した符号Rで示す方向がトラクタの右側であり、符号Lで示す方向がトラクタの左側である。
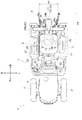
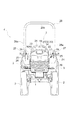
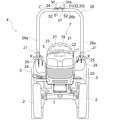
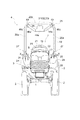
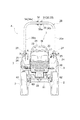
図1に示すように、トラクタは、車体フレーム1によって車体全体が支持され、向き変更操作可能で駆動可能な左右の前輪2と、向き固定で駆動可能な左右の後輪3とを備えて走行車体4が構成されている。車体前部のボンネット5の内部にエンジン6が搭載され、車体の後部側に運転部7が備えられている。
図1、図2に示すように、走行車体4は、その後部に、車体後部への耕耘装置などの作業装置(図示せず)の着脱が可能で且つ作業装置を連結した状態で昇降操作可能な昇降リンク機構8が備えられている。運転部7の下部に、エンジン6の動力が伝達される動力を後車軸9から左右の後輪3に伝達するミッションケース10が備えられている。ミッションケース10内には、左右の後車軸9の駆動速度に速度差を与えることが可能な差動装置11が備えられ、エンジン6からの動力が差動装置11を介して左右の後輪3に振り分けて伝達される。ミッションケース10は後車軸9を回動自在に支持している。
この実施形態では、車体前部に位置するエンジン6、エンジン6の後方に連結されるクラッチハウジング12、中間フレーム13、車体後部に位置するミッションケース10等が一体的に連結されて剛性の高い車体フレーム1が形成されている。
ミッションケース10の上部には、昇降リンク機構8を介して作業装置を昇降駆動する油圧式の昇降シリンダ14が備えられている。昇降シリンダ14はシリンダケース15に収容されている。シリンダケース15の内部に、昇降シリンダ14の伸縮操作にて揺動操作される揺動アーム16が備えられ、揺動アーム16と一体的に揺動するリフトアーム17と、昇降リンク機構8とが、リフトロッド18を介して枢支連結されている。
運転部7は、操縦者が着座可能な運転座席19と、その運転座席19の前側に位置して運転部7の床面を形成する搭乗ステップ20、運転座席19の前方に位置する前輪操舵用のステアリングホイール21及びその他の制御レバー22を備えた操縦パネル部23が備えられている。運転座席19の左右両側には、左右の後輪3の上方を覆う後輪フェンダー24が備えられ、後輪フェンダー24にも複数の作業用の操作具25が設けられている。運転座席19は、この座席の前部の支点回りに後部を持ち上げる形態で前方へ揺動可能に構成しても良い。この構成により運転座席19を揺動させ、ミッションケース10を露出できる。
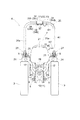
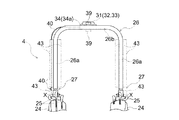
運転部7の後部には、左右両側が車体フレーム1の後端部、すなわち、ミッションケース10の後端部に連結及び固定されるとともに、運転座席19の後側上方を囲うように上方に延びる転倒保護用のロプス26が備えられている。すなわち、ロプス26は、左右一対の縦方向に沿って延びる縦フレーム部26aと、左右の縦フレーム部26aの上端同士を繋いで横方向に沿って延びる横フレーム部26bとを有しており、車体正面視で略門型に形成されている。ロプス26は、中空状の角パイプ材を屈曲することにより左右の縦フレーム部26aと横フレーム部26bとを一体形成することで内部空間が連なる構造を有し、正面視で略門型となる。つまり、ロプス26の縦フレーム部26aの下端部は、ミッションケース10、車体フレーム1、後車軸9の車軸ケース等の剛性が高い部材に固定しても良い。また、ロプス26の縦フレーム部26aの下端部をミッションケース10に固定する場合、この縦フレーム部26aを、車体左右方向および車体前後方向の複数箇所で固定しても良い、このような固定によりロプス26を強固に固定できる。
ロプス26は、左右の縦フレーム部26aの下部に設けられた折畳部27において横向き揺動支点Xを中心に折り畳可能に構成されている。このように構成することで、車体の運搬時等においてロプス26の可動部分(左右の縦フレーム部26aで揺動支点より上側部分と、横フレーム部26b)を、前記揺動支点Xを中心に車体後方側に揺動させて折り畳むことにより、上方への突出量を少なくして輸送の邪魔になることを回避できる。また、折り畳み状態では横フレーム部26bを低くし、作業者による測位ユニット31のメンテナンスが容易に行えるようにしている。
走行車体4には、走行制御用のコントローラ30と、前輪2を操向操作可能なステアリングモータ(図示せず)と、GNSS(全地球航法衛星システム)の一例である周知のGPS(Global Positioning System)(全地球測位システム)を利用して走行車体4の位置及び方位を測定する測位ユニット31等が備えられている。
測位ユニット31は、GPS衛星(図示せず)から送信された電波と、既知位置に設置された基準局(図示せず)から送信されたデータとを受信する衛星航法用のアンテナユニット32、及び、測位ユニット31の測位データに基づいて走行車体4の位置及び方位を測定する衛星航法装置33を備えている。GPSを利用した測位方法として、本実施形態においては、GPSの測位データと、地上側に予め位置が判明している基準局から送信される誤差補正情報とを用いて車体の位置を計測するD−GPS(Differential GPS)が採用されている。基準局は、GPS衛星からの電波を受信して得た誤差補正情報を無線通信により送信する。衛星航法装置33は、GPS衛星からの電波を受信して得た測位データと、基準局からの情報とに基づいて、走行車体4の位置及び方位を求める。また、GPSを利用した測位方法として、RTK(Real Time Kinematic )方式等、他の測位方式を用いても良い。
アンテナユニット32を含む測位ユニット31は、GPS衛星からの電波の受信感度が高くなるように、ロプス26における頂部(最も高い位置)にある横フレーム部26bに備えられている。測位ユニット31は、横フレーム部26bにおける横方向中央部付近において、支持部材としての取付ブラケット34を介して取付られている。つまり、アンテナユニット32が、運転座席19の上端よりも高い位置であり、且つ、ロプス26の揺動支点Xよりも上側に位置する状態で備えられている。
上記したようにアンテナユニット32が、走行車体4から上方側に離れた箇所に備えられるので、GPSを利用して測定した走行車体4の位置及び方位には、走行車体4のヨーイング、ピッチング、又は、ローリングに伴うアンテナユニット32の位置ズレに起因した測位誤差が含まれている。
そこで、走行車体4には、上記したような測位誤差を取り除く補正を可能にするために、3軸のジャイロスコープ(図示せず)と3方向の加速度センサ(図示せず)とを備えることで走行車体4のヨー角、ピッチ角、ロール角、などを計測する慣性計測装置(IMU:Inertial Measurement Unit)39が備えられている。この慣性計測装置39を備えることにより、測位ユニット31により測定した走行車体4の位置及び方位の情報が、慣性計測装置39にて計測された走行車体4のヨーイング、ピッチング、又は、ローリングに伴うアンテナユニット32の位置ズレの情報により補正される。
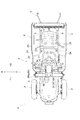
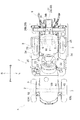
図2に示すように、慣性計測装置39は、平面視で、ミッションケース10と重複する箇所に配置されている。説明を加えると慣性計測装置39は、運転座席19の下側において後車軸9の駆動軸芯よりも上方に位置する箇所であって、且つ、ミッションケース10の上側に備えられるシリンダケース15の上側に配置されている。さらに説明すると、慣性計測装置39は、側面視で、後輪3と重複する箇所に配置されている。この箇所は、剛性が高く撓み変形等が生じ難い箇所であり、さらに、エンジン6からも離れているので、エンジン6の振動による影響を受け難いものとなり、誤差の少ない状態で計測することができる。また、このトラクタでは、運転座席19を前方に揺動させることでミッションケース10を露出できるので、運転座席19の揺動により、慣性計測装置39に対するアクセスを容易となり、良好な状態でのメンテナンスが可能となる。
このトラクタでは、エンジン6と、クラッチハウジング12と、ミッションケース10とを連結することで剛体部材として構成される車体フレーム1に隣接する位置の具体例として、ミッションケース10の上側のシリンダケース15の上側に慣性計測装置39を備えている。また、慣性計測装置39は、正面視において左右の後輪フェンダー24の中間位置に配置されている。
図1に示すように、コントローラ30は、操縦パネル部23の内部に収納する状態で備えられている。そして、コントローラ30は、事前に設定された圃場内での走行経路の情報と、測位ユニット31の測位結果とに基づいて、作業用の走行経路に沿って走行車体4が走行するようにステアリングモータ等を制御する自動操向制御を実行するように構成されている。
〔測位ユニットの配置〕
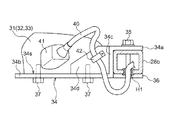
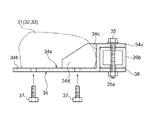
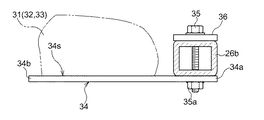
図5、図6に示すように、測位ユニット31を支持する支持部材としての取付ブラケット34は、側面視において前部の取付部34aの位置が高く、後部の載置部34bの位置が低く、これらの中間に縦壁部34cが一体形成された階段状となる成形物である。載置部34bの上面には載置面34sが形成され、この載置面34sの左右両端位置に補強フレーム34d(図2、図4を参照)が立設されている。
取付ブラケット34の取付部34aには複数のボルト挿通孔が形成され、これと同様に載置部34bにボルト挿通孔が形成されている。横フレーム部26bには取付部34aの挿通孔に対応して固定ボルト35が挿通するためのボルト挿通孔が上下に貫通して形成され、横フレーム部26bの下面には固定ボルト35が螺合するナット部35aを有する固定板36が配置される。
この構成から、横フレーム部26bの上面に取付ブラケット34の取付部34aを当接させ、この横フレーム部26bの後面に取付ブラケット34の縦壁部34cを当接させ、取付部34aの複数のボルト挿通孔に挿通する固定ボルト35を、横フレーム部26bの挿通孔に挿通し、更に、固定板36のナット部35aに螺合させることにより取付ブラケット34が横フレーム部26bに固定される。
また、取付ブラケット34の載置部34bに測位ユニット31を載せ付けるように測位ユニット31を配置し、載置部34bの挿通孔に下方から上方に挿通する連結ボルト37載置状態で支持される。このように支持される状態では測位ユニット31が、載置面34sに載置される状態で左右の補強フレーム34dに挟まれる位置に配置される。
これにより、取付ブラケット34(支持部材の一例)は正面視において横フレーム部26bの左右方向での中央で、且つ、平面視において後端を横フレーム部26bの後端から後方に張り出す位置に配置される。
この構成では、正面視において測位ユニット31は、横フレーム部26bに一部重複する位置に配置され、測位ユニット31の上端が横フレーム部26bの上面から上方に突出する位置関係となる。この構成から、樹木の枝等が測位ユニット31に接触し得る環境で作業する場合に、取付ブラケット34、あるいは、ロプス26が、枝等が測位ユニット31に接触する不都合を解消する。
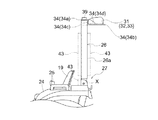
アンテナユニット32を含む測位ユニット31とコントローラ30とを接続する配線40が、縦フレーム部26aに沿って配索されている。具体的には、図5に示すように、測位ユニット31の側面に配線40を取り出すための位置が設定され(以下、この位置を配線取出位置と称する)、この配線取出位置の外部位置に防水カバー41を配置し、この防水カバー41から引き出された配線40が配線取出位置より高い位置に達するように、この配線40の引き出し姿勢を斜め姿勢に設定している。
また、引き出された配線40のうち、防水カバー41と横フレーム部26bとの中間位置を補強フレーム34dの外面に設けられたクランプ42によって支持している。そして、図7に示すように、配線40を、横フレーム部26bの下面の第1貫通孔H1から横フレーム部26bの内部空間に挿通し、一方の縦フレーム部26aの下部で折畳部27より上部(揺動支点Xよりも上側)で、この縦フレーム部26aの内面側(左右の縦フレーム部26aの対向する面側)の第2貫通孔H2から引き出すように配索している。
このように、防水カバー41からの配線40を斜め上方に引き出すため、配線40に雨水が付着した場合でも、付着した雨水を、この配線40の最も高い位置から決まった方向に流し、配線から早期に脱落させることも可能となる。尚、クランプ42は、横フレーム部26bに備えても良い。
この配線40は、ミッションケース10の上側に位置する慣性計測装置39にまで延び、慣性計測装置39からの配線と合流している。更に、合流した配線40は、後輪フェンダー24と運転座席19との間を通り、更に、搭乗ステップ20と、フロアマットとの間を通って操縦パネル部23に備えられたコントローラ30にまで延びている。
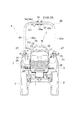
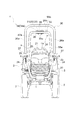
図1、図2に示すように、側面視において、測位ユニット31は、運転座席19の後端と左右の昇降リンク機構8の後端との間となる第1領域A1に備えられると共に、平面視で左右の昇降リンク機構8の間となる第2領域A2に備えられている。
〔別実施形態a〕
本発明は、上記した実施形態以外に以下の別実施形態のように構成しても良い。以下に説明する別実施形態の各々では、実施形態と同じ機能を有するものには、実施形態と共通の番号、符号を付している。
(a−1)図8に示すように、アンテナユニット32と衛星航法装置33との少なくとも一方を含む測位ユニット31を、取付ブラケット34により横フレーム部26bに備えると共に、慣性計測装置39をロプス26の横フレーム部26bに備える。同図には、慣性計測装置39を横フレーム部26bの上面に備える構成を示している。
この別実施形態(a−1)では、慣性計測装置39と測位ユニット31とが上下位置となる位置関係で配置することも考えられる。具体例として、図8に二点鎖線で示すように、慣性計測装置39を横フレーム部26bの下面に備えることも可能である。このように横フレーム部26bの下面に備えることにより慣性計測装置39に対する走行車体4の動揺による影響を抑制することも考えられる。
(a−2)図8に示すように、アンテナユニット32を含む測位ユニット31とコントローラ30とを接続する配線40を縦フレーム部26aの外面に沿って配索し、このように配索した配線を覆うように縦フレーム部26aに化粧カバー43を備える。
図8、図9には、縦フレーム部26aの外側面で折畳部27より上側と、折畳部27より下側とに化粧カバー43を備えた構成を示している。また、折畳部27より下側においては配線40を、折畳部27のうち走行車体4に支持される部位にクランプする形態で保持しても良い。これにより、縦フレーム部26aの内部空間に配索する構成のようの貫通孔を形成しなくて済み、ロプス26の強度低下を抑制できる。更に、縦フレーム部26aの車体外方側に配置される配線40の略全てを化粧カバー43で覆って保護するだけでなく、配線40の垂れ下がりや、姿勢の乱れも抑制できる。
この別実施形態(a−2)では、図8、図9に二点鎖線で示すように、配索対象が左右の縦フレーム部26aの何れでも良く、縦フレーム部26aのうち、走行車体4を基準に外側となる外側面と、走行車体4を基準に内側となる内側面と、縦フレーム部26aの前面と後面との何れでも良い。これに対応して化粧カバー43を備えることも可能である。
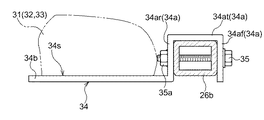
(a−3)支持部材としての取付ブラケット34を、図10,11,12の何れかに示すように構成することも可能である。つまり、図10に示す構成では、取付ブラケット34の取付部34aとして、横フレーム部26bの上方から抱き込むように前壁34afと上壁34atと後壁34arとで構成している。この構造において前壁34afと、横フレーム部26bと、後壁34arとを固定ボルト35が前後方向に貫通し、後壁34arのナット部35aに螺合することにより取付ブラケット34が横フレーム部26bに固定される。
また、図11に示す構成では、取付ブラケット34の取付部34aとして、取付ブラケット34の前端上面を、横フレーム部26bの下面に当接させ、横フレーム部26bの上面に固定板36配置し、固定板36と、横フレーム部26bと、取付部34aとを固定ボルト35が上下方向に貫通し、取付部34aの下面のナット部35aに螺合することにより取付ブラケット34が横フレーム部26bに固定される。
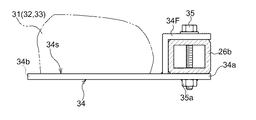
また、図12に示す構成では、取付ブラケット34の取付部34aとして、横フレーム部26bの後面と上面とに当接可能な形状の嵌合部材34Fを備え、この嵌合部材34Fを横フレーム部26bの上面と後面とに当接させ、取付部34aを横フレーム部26bの下面に当接させ、嵌合部材34Fの上壁部分と、横フレーム部26bと、取付部34aとを固定ボルト35が上下方向に貫通し、取付部34aの下面のナット部35aに螺合することにより取付ブラケット34が横フレーム部26bに固定される。
(a−4)実施形態では、取付ブラケット34が横フレーム部26bから後方に延びる姿勢で配置されるため、測位ユニット31は横フレーム部26bの後方に配置されている。これに代えて、取付ブラケット34を横フレーム部26bから前方に延びる姿勢で配置し、この取付ブラケット34に対して測位ユニット31を支持しても良い。このように配置することにより、測位ユニット31が横フレーム部26bの前方側に配置される。
(a−5)測位ユニット31あるいはアンテナユニット32とコントローラ30との間に配線を設けることなく、を無線通信により情報の伝達を行うように構成しても良い。
〔別実施形態b〕
(b−1)図13、図14に示すように、縦フレーム部26aの上下方向での中間部分に折畳部27を備える。これにより、ロプス26を、折畳部27より上側を横向きの揺動支点Xを中心に折り畳み可能に構成すると共に、縦フレーム部26aのうち折畳部27より上側には上端側ほど前側に傾斜する傾斜部26asを形成する。この左右の傾斜部26asの外面の各々に測位ユニット31を備える。この別実施形態bでは3つ以上の測位ユニット31を備えるものでも良い。
この別実施形態(b−1)では、ロプス26の左右の縦フレーム部26aの双方で運転座席19の背もたれ部のトップより高い位置に測位ユニット31を備えている。具体的には、折畳部27より上側となる傾斜部26asの外側面に支持部材としての取付ブラケット34を取り付け、この取付ブラケット34に対して測位ユニット31を備えている。
測位ユニット31は、GPS衛星(図示せず)から送信された電波と、既知位置に設置された基準局(図示せず)から送信されたデータとを受信する衛星航法用のアンテナユニット32、及び、測位ユニット31の測位データに基づいて、走行車体4の位置及び方位を測定する衛星航法装置33を備えている。
図15に示すように、コントローラ30は、2つの測位ユニット31からの測位情報が入力することにより自車位置を特定する自車位置特定手段30aを備え、この自車位置特定手段30aは、慣性計測装置39からの情報に基づいて自車位置の補正を行う。そして、コントローラ30は自車位置と予め設定された走行経路の情報とに基づいて走行経路に沿って走行を行うように操向制御部SUに制御信号を出力する。
この構成では、ボンネット5や走行車体4の一部に妨げられることや、障害物の影響を受けることなく、GPS衛星等から送信される衛星測位情報を良好に受信でき、コントローラ30では、2つの測位ユニット31からの測位情報に基づき、誤差を低減する処理や平均値を取得する処理を行い高精度での自律走行を可能にする。
(b−2)図16、図17に示すように、運転座席19の後方に転倒保護用のロプス26(この別実施形態では、後部ロプス26と称する)を備えると同時に、運転座席19の前方に前部ロプス55を備え、後部ロプス26と前部ロプス55との各々の左右位置に測位ユニット31を備えている。
前部ロプス55は、中空の角パイプ材を屈曲することにより、縦方向に沿って延びる左右一対の前部縦フレーム部55aと、これらの上端同士を繋いで横方向に沿って延びる前部横フレーム部55bとを有し、車体正面視で略門型に形成されている。このような構成において、左右の前部縦フレーム部55aに対して取付ブラケット34を介して測位ユニット31を備えている。
測位ユニット31は、衛星航法用のアンテナユニット32と、走行車体4の位置及び方位を測定する衛星航法装置33とを有している。
この別実施形態(b−2)でも別実施形態(b−1)と同様に複数の測位ユニット31からの測位情報を取得することにより誤差を低減する処理や平均値を取得する処理を行い高精度での自律走行を可能にする。
(b−3)複数の測位ユニット31から測位情報を取得できるように構成したものであっても、複数の測位情報を同時に用いる必要はなく、例えば、所定の受信状況を満たす測位ユニット31の測位情報に基づいて自車位置を特定する処理を行っても良い。また、複数の測位ユニット31の受信情報を比較し、所定の測位ユニット31の受信情報が、他の測位ユニット31の受信情報から乖離している場合には、その測位ユニット31の測位情報を用いないように制御形態を設定しても良い。
この別実施形態bでは3つ以上の測位ユニット31を備えるように構成されるものでも良く、3つ以上の測位情報に基づいて自車位置を特定するように構成しても良い。
〔別実施形態c〕
(c−1)図18、図19に示すように、ボンネット5が、上面部5tと左右の両側の側面部5sとを有しており、このボンネット5の上面部5tで車体前後方向の中央部より前方にアンテナユニット32を有する測位ユニット31を、左右方向での中央位置に支持部材としての取付ブラケット34を介して取り付ける。
また、図18に示すように側面視において、アンテナユニット32は、ロプス26の横フレーム部26bの上端とステアリングホイール21の上端とを結ぶ領域ラインELより上側に位置し、しかも、ステアリングホイール21の上端を通る水平姿勢の水平ラインHLよりも下方に位置する。尚、測位ユニット31を備える場合に、測位ユニット31の一部、あるいは、全体が、ボンネット5の前端より前側に張り出す位置に配置されても良い。
このようにアンテナユニット32を有する測位ユニット31を配置することにより、ロプス26等の車体構成物に等の障害物の影響を受けることなくGPS衛星等から送信される衛星測位情報を良好に受信できる。更に、水平ラインHLより下側に測位ユニット31が配置されるため、運転座席19に着座した操縦者の視界を妨げることもない。
(c−2)図20に示すように、ボンネット5の内部で、左右方向での中央位置に取付ブラケット34を介してアンテナユニット32を有する測位ユニット31を備え、ボンネット5のうちの測位ユニット31の上側に対向する部分の一部に樹脂製の壁体5pを備える。
このように測位ユニット31を備えているので、測位ユニット31を風雨により傷める不都合を招くことがなく、しかも、ロプス26等の車体構成物に等の障害を受けることなくGPS衛星等から送信される衛星測位情報を良好に受信できる。更に、測位ユニット31の上方に樹脂製の壁体5pを備えているためGPS衛星等から送信される衛星測位情報を妨げられずに受信できる。
〔別実施形態d〕
(d−1)図21、図22に示すように、走行車体4の車体フレーム1を構成する左右のフレーム部材1aに対してフロントガード47(フロント支持部材の一例)が固定されている。このフロントガード47に取付ブラケット34を備え、この取付ブラケット34にアンテナユニット32を有する測位ユニット31を備える。フロントガード47は、ボンネット5の前端より前側に配置されることにより走行時に建造物の外壁や、樹木等にボンネット5が接触して破損する不都合を防止するものである。
フロントガード47は、各々が左右のフレーム部材1aに基端が連結する縦長姿勢の左右一対の縦部材47aと、これらの上端に連結する横部材47bとで構成されている。横部材47bのうち左右方向での中央部に取付ブラケット34を備え、この取付ブラケット34の上面に載置する形態で測位ユニット31を備えている。これにより、測位ユニット31の上端部が、縦部材47aの上端より上方で、フロントガード47の左右方向での中央位置に備えられる。
この別実施形態(d−1)では、図21に示すように、側面視において、測位ユニット31がステアリングホイール21の上端を通る水平姿勢の水平ラインHLよりも下方に位置するように配置される。
このように、ボンネット5の前の開いた空間に測位ユニット31を配置することになり、障害物の影響を受けることなくGPS衛星等から送信される衛星測位情報を良好に受信できる。更に、水平ラインHLより下側に測位ユニット31が配置されるため、運転座席19に着座した操縦者の視界を妨げることもない。
(d−2)図23に示すように、フロント支持部材としてのフロントガード47の一部を、横向き姿勢の切換軸芯Yを中心に前後方向に揺動自在に支持し、このフロントガード47に対し、別実施形態(d−1)と同様の構成によりアンテナユニット32を有する測位ユニット31を備える。
この別実施形態(d−2)では、フロントガード47の縦部材47aが下部のベース部材47asと、切換軸芯Yを中心に前後方向に揺動可能に支持された縦揺動部材47atとで構成されている。また、左右の縦揺動部材47atの上端に横部材47bが連結し、この横部材47bの左右方向の中央に取付ブラケット34を介して測位ユニット31が備えられる。
このように構成することにより、縦揺動部材47atを、切換軸芯Yを中心に前方側に揺動させることで測位ユニット31をボンネット5の前端から更に前方に変位させてGPS衛星等から送信される衛星測位情報を良好に受信できる。また、この別実施形態(d−2)では、図23に二点鎖線で示すように縦揺動部材47atを前方に揺動させた際に、測位ユニット31の姿勢が水平に維持できるように構成しても良い。
〔別実施形態e〕
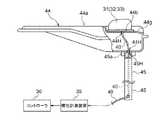
(e−1)図24に示すように、運転部7の上方を覆うキャノピー44にアンテナユニット32を備えても良い。つまり、キャノピー44は、運転座席19の後部位置の左右に立設した支柱部材45に対し車体前部に向けて片持ち状に延びる樹脂製の屋根部材44aを有している。このキャノピー44の屋根部材44aの上面において、前後方向での中央から前端の間の領域に取付ブラケット34を介してアンテナユニット32を備える。
特に、アンテナユニット32をキャノピー44の屋根部材44aの前端に備える場合には、図24に示す如く支柱部材45と、屋根部材44aの前端との間に梁部材46を備えることにより支持強度を向上させても良い。つまり、この構成では梁部材46の長手方向の延長線上にアンテナユニット32を有する測位ユニット31(アンテナユニット32)を配置することにより、高い強度でアンテナユニット32を支持している。
この別実施形態(e−1)では、同図に二点鎖線で示すようにキャノピー44の前後方向での中央位置にアンテナユニット32を備えることや、この中央位置と前端位置との中間にアンテナユニット32を備えることにより高い位置においてGPS衛星等から送信される衛星測位情報を良好に受信できる。
尚、この別実施形態(e−1)では、支柱部材45を用いずにロプス26の上端にキャノピー44を備えても良い。図24では、梁部材46を屋根部材44aの前端に連結する構成を示していたが、必ずしも前端に連結する必要はなく、梁部材46が、キャノピー44の前後方向での中間位置に連結するように構成しても良い。
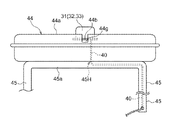
(e−2)図25に示すように、キャノピー44の屋根部材44aの前後方向で中央(同図で二点鎖線で示す位置)から後端の間のアンテナユニット32を備える。同図では、キャノピー44の後端にアンテナユニット32を備えた構成を示している。この位置にアンテナユニット32を備えることにより、支柱部材45の長手方向での延長線上にアンテナユニット32を配置することになり、上下方向への振動を支柱部材45が受け止め、走行車体4が上下に振動した場合でも、この振動を支柱部材45が受け止めることにより振動が抑制された状態での衛星測位上方の受信が可能となる。
(e−3)図26、図27に示すように、キャノピー44の屋根部材44aの上面に取付凹部44bを形成し、この取付凹部44bにアンテナユニット32を嵌め込む形態でアンテナユニット32を備える。また、取付凹部44bに連なる排水溝44g(排水手段の一例)を形成する。
この構成では、左右の支柱部材45が、中空の角パイプ状で構成され、この上端を屈曲することにより、左右の支柱部材45の上端同士を連結する角パイプ状の連結支柱部45aを備えている。また、取付凹部44bの底部と、屋根部材44aの底壁とに挿通孔44Hを上端に備えており、この挿通孔44Hに挿通する配線40が導入される導入孔45Hを連結支柱部45aの上面に形成している。
この構成から、アンテナユニット32からの配線40を、挿通孔44Hに挿通し、連結支柱部45aの上面の導入孔45Hから支柱部材45の内部に挿通し、この支柱部材45の下部から外部に引き出し、慣性計測装置39を介してコントローラ30に対して、測位情報を伝えることが可能となる。
この別実施形態(e−3)では、取付凹部44bにアンテナユニット32を嵌め込む形態で備えるため、アンテナユニット32を安定的に支持することが可能となる。しかしながら、取付凹部44bに雨水が貯まることも考えられることから、取付凹部44bに連通する排水溝44gを形成することにより、雨水を良好に排出し、取付凹部44bに雨水が残留する不都合を解消している。
この別実施形態(e−3)では、アンテナユニット32からの配線40を排水溝44gに沿わせて配置しても良い。このように配線40を配置することにより、配線40の配置に無理がない。また、同図では、取付ブラケット34を示していないが、取付ブラケット34を介してアンテナユニット32を支持しても良い。
〔別実施形態f〕
図28には、アンテナユニット32と衛星航法装置33とを有する測位ユニット31を走行車体4に備え、この測位ユニット31の測位に基づき耕起作業を行う際の走行車体4の走行経路Mを示している。測位ユニット31の測位に基づいて走行車体4を直進走行させ、走行車体4が枕地に達して旋回した場合には、旋回前の走行経路Mと旋回後の走行経路Mとの間に所定距離の間隔Gが作り出される。
この間隔Gは、同図に示すように図面の上側に示す畦際で右旋回した場合でも、図面の下側で左旋回した場合でも、等しい値であることが理想であり、測位ユニット31による測位に基づいて耕起作業を行う場合には、この間隔Gを決まった値に設定する。しかしながら、測位ユニット31が走行車体4の左右方向での中心から、左右方向の何れかの方向に外れている場合には、間隔Gが等しい値とならず、測位ユニット31を、走行車体4の左右方向での中央位置に高い精度で備えることが望まれる。このような課題に対応するため、この別実施形態fでは以下に説明する構成が採用される。
(f−1)図29、図30に示すように、縦方向に沿って延びる左右一対の縦フレーム部26aと、これらの上端同士を繋いで横方向に沿って延びる横フレーム部26bとで構成されるロプス26を走行車体4の後部位置に備えている。
横フレーム部26bの左右方向での中央位置の上面に取付ブラケット34を水平姿勢で固設しており、この取付ブラケット34の載置面34sに対し位置調節機構Cを介してアンテナユニット32を有する測位ユニット31を取り付けている。
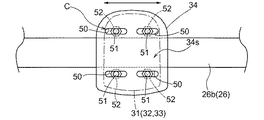
図31に示すように、位置調節機構Cは、取付ブラケット34に穿設され左右方向に延びる複数(この別実施形態(f−1)では4つ)の長孔50と、これらの長孔50に挿通可能となるように、測位ユニット31の底面から下方に向けて突出する複数(この別実施形態(f−1)では4つ)の締結ボルト51と、締結ボルト51に螺合する締結ナット52とを備えて構成されている。
このような構成から、複数の長孔50に締結ボルト51を挿通し、締結ナット52の締結により、走行車体4の横方向の任意の位置に測位ユニット31の位置を固定することにより、横方向での測位ユニット31の位置調整も容易に行える。
別実施形態(f−1)の変形例として、アンテナユニット32を有する31に対し取付ブラケット34の載置面34sに当接するフランジ(図示せず)を左右方向に張り出すように形成し、このフランジに対し横方向に延びる長孔50を形成し、取付ブラケット34には長孔50に挿通可能な締結ボルト51を上方に向かう姿勢で備え、締結ボルト51に螺合する締結ナット52を備えても良い。この変形例では長孔50と締結ボルト51と、締結ナット52とで位置調節機構Cが構成される。
(f−2)図32に示すように、この別実施形態(f−2)では位置調節機構Cが、取付ブラケット34において左右方向にずらして整列する複数(この別実施形態(f−1)では4組)の複数の挿通孔53と、これら4組の挿通孔53に挿通できるように、アンテナユニット32を有する測位ユニット31の底面には下方に向けて複数(この別実施形態(f−1)では4つ)の締結ボルト51と、締結ボルト51に螺合する締結ナット52とで構成されている。
このような構成から、複数の挿通孔53のうちの1つを選択して締結ボルト51を挿通し、締結ナット52の締結により、走行車体4の横方向の任意の位置に測位ユニット31の位置を固定することにより、横方向での測位ユニット31の位置調整を容易に行える。
別実施形態(f−2)の変形例として、測位ユニット31に対し取付ブラケット34の載置面34sに当接するフランジ(図示せず)を形成すると共に、フランジに対し左右方向にずらして整列する複数(この別実施形態(f−1)では4組)の挿通孔53を形成し、取付ブラケット34には挿通孔に挿通可能な締結ボルト51を上方に向かう姿勢で備え、この締結ボルト51に螺合する締結ナット52を備えても良い。この変形例では複数の挿通孔53と、締結ボルト51と、締結ナット52とで位置調節機構Cが構成される。
〔別実施形態g〕
この別実施形態gでは、運転座席19の前方に転倒保護用のロプスを備えた構成を対象とするものであるが、運転座席19の後方に転倒保護用のロプスを備えた構成を排除するものではない。そのため、運転座席19の前方のロプスを前部ロプス55と称し、運転座席19の後方のロプスを後部ロプス26と称する。
(g−1)図33、図34に示すように、運転座席19の前方に転倒保護用の前部ロプス55を設け、この前部ロプス55に測位ユニット31を備える。測位ユニット31は、衛星航法用のアンテナユニット32と、走行車体4の位置及び方位を測定する衛星航法装置33とを有して構成されている。
前部ロプス55は、中空の角パイプ材を屈曲することにより、縦方向に沿って延びる左右一対の前部縦フレーム部55aと、これらの上端同士を繋いで横方向に沿って延びる前部横フレーム部55bとを有し、車体正面視で略門型に形成されている。このような構成において前部横フレーム部55bの上面に対して取付ブラケット34を介して測位ユニット31を備えている。これにより、アンテナユニット32を有する測位ユニット31は運転座席19の背もたれ部の上端より高い位置に配置される。
この別実施形態(g−1)では、前部ロプス55は、左右の前部縦フレーム部55aの下部に設けられた折畳部27において横向き揺動支点Xを中心に折り畳可能に構成されている。このように構成することで、車体の運搬時等において前部ロプス55の上フレーム部(左右の前部縦フレーム部55aで揺動支点Xより上側部分と、前部横フレーム部55b)を、前記揺動支点Xを中心に車体前方側に揺動させて折り畳むことにより、上方への突出量を少なくできるように構成されている。この折り畳み時には、揺動支点Xより上側の縦フレーム部26aが180°揺動し、非使用位置に設定できる。この非使用位置では横フレーム部26b及びアンテナユニット32が揺動支点Xより下方に位置するため、アンテナユニット32等のメンテナンスを容易にする。
この折畳の構成において、揺動支点Xより下側を下フレーム部と称しており、この下フレーム部は走行車体4に固定される。また、この前部ロプス55では、人為操作により図33に実線で示すように上フレーム部が立ち上がる起立姿勢と、図33に二点鎖線で示すように上フレーム部が車体前方に倒伏する格納姿勢とに切換自在となる。特に、格納姿勢から起立姿勢への操作時の作業者の負担を軽減するためアシスト機構としてのガススプリング56を備えている。
更に、この構成では、図35に示すようにアンテナユニット32を含む測位ユニット31とコントローラ30とを接続する配線40が、前部横フレーム部55bから前部縦フレーム部55aに沿って配索されている。つまり、配線40を、前部横フレーム部55bの下面の第1貫通孔H1から前部横フレーム部55bの内部空間に挿通し、一方の前部縦フレーム部55aの下部で折畳部27より上部(揺動支点Xよりも上側)で、この前部縦フレーム部55aの内面側(左右の前部縦フレーム部55aの対向する面側)の第2貫通孔H2から引き出すように配索している。このように引き出された配線40はコントローラ30に接続する。
この別実施形態(g−1)の構成では、上フレーム部に測位ユニット31を備えることで上フレーム部が重量化しても、ガススプリング56の付勢力により上フレーム部を起立姿勢に容易に設定できる。また、配線40を横フレーム部26bの内部から、前部縦フレーム部55aの内部を挿通することにより配線40を傷めることがなく、配線40の垂れ下がりも抑制できる。
この別実施形態(gー1)では、運転座席19の前方に転倒保護用の前部ロプス55を備えると共に、運転座席19の後方に転倒保護用のロプス26を備えるように走行車体4を構成しても良い。また、アシスト機構としてガススプリング56に代えてトーションスプリングやコイルスプリングを備えても良い。ロプス26は後方に倒伏することで格納姿勢に達するように構成されても良い。
(g−2)図36、図37に示すように、運転座席19の後方位置に後部ロプス26を備えた走行車体4において、運転座席19の前部位置に前部ロプス55を備え、この前部ロプス55に測位ユニット31を備える。測位ユニット31は、衛星航法用のアンテナユニット32と、走行車体4の位置及び方位を測定する衛星航法装置33とを有して構成されている。
この前部ロプス55は、縦方向に沿って延びる左右一対の前部縦フレーム部55aと、これらの上端同士を繋いで横方向に沿って延びる前部横フレーム部55bとを有することにより車体正面視で略門型に形成されている。このような構成において前部横フレーム部55bの上面に対して取付ブラケット34を介して測位ユニット31を備えている。これにより、アンテナユニット32を有する測位ユニット31は運転座席19の背もたれ部の上端より高い位置に配置される。
この別実施形態(g−2)では、前部ロプス55が中空の角パイプ材を折り曲げることにより全体的が略門形に形成されると共に、基端側が上方側ほど前方に向かう斜め姿勢である。このため、測位ユニット31を後部ロプス26から離間させ、受信性能を向上させている・尚、この前部ロプス55は、図36に二点鎖線で示すように、走行車体4から垂直に上方に延びるように構成されるものであっても良い。
更に、アンテナユニット32を有する測位ユニット31を前部ロプス55に支持する構成として、例えば、横フレーム部26bの上面に対して測位ユニット31をボルト等で直接的に固定する構成を採用しても良い。
〔別実施形態h〕
(h−1)図38、図39に示すように、運転座席19の後側上方を囲うように上方に延びる転倒保護用のロプス26が備えられ、このロプス26に備えた治具48の取付台48sに対し取付ブラケット34を介して測位ユニット31を支持する。ロプス26は、中空の角パイプ材を屈曲することにより縦方向に沿って延びる左右の縦フレーム部26aと、これらの上端同士を繋いで横方向に沿って延びる横フレーム部26bとを有している。測位ユニット31は、衛星航法用のアンテナユニット32と、走行車体4の位置及び方位を測定する衛星航法装置33とを有して構成されている。
図39に示すように、治具48は、中空の角パイプ材で成る左右の支持部材48aと、これらの上端同士を連結する中空の角パイプ材で成る連結部材48bと、左右の支持部材48aの下端に形成した固定ブラケット48cとを備え、連結部材48bの上面に取付台48sを設けている。
左右の固定ブラケット48cは、ロプス26の縦フレーム部26aの後面と左右の側面とに当接可能な形状であり、左右の固定ブラケット48cには横方向に貫通する取付孔(図示せず)が形成されている。これに対応してロプス26の左右の縦フレーム部26aには横方向に貫通する固定用孔(図示せず)が形成されている。
このような構成から、この別実施形態(h−1)では、ロプス26の左右の縦フレーム部26aを抱き込む位置に固定ブラケット48cを配置し、取付孔と固定用孔とに亘って保持ボルト49を挿通し、保持ナット等に螺合させることで、ロプス26に対して治具48が固定される。
また、測位ユニット31に接続する配線40は、連結部材48bの内部空間と、支持部材48aの内部空間と、ロプス26の縦フレーム部26aの内部空間を挿通しており、この配線40からコントローラ30に測位情報が伝えられる。
この固定状態では、側面視において左右の支持部材48aが斜め後方上方に向けて延出される姿勢となり、左右の支持部材48aの上端に連結する連結部材48bが水平姿勢となり、取付台48sも水平姿勢となる。この結果として測位ユニット31は、ロプス26から後方に離間した位置で、後輪フェンダー24と、運転座席19の背もたれ部との何れより高い位置で水平姿勢で支持される。
また、ロプス26は剛性が高いため測位ユニット31の振動を抑制して計測誤差を小さくでき、更に、測位ユニット31がロプス26から離間する位置に配置されるためロプス26に遮られることなく、測位情報を受信できる。
この別実施形態(h−1)では、図38に二点鎖線で示すように治具48が、ロプス26から前方上方に延びるように配置されても良い。
(h−2)図40に示すように、縦フレーム部26aのうち折畳部27より上側に上端側ほど前側に傾斜する傾斜部26asを備え、縦フレーム部26aのうち、折畳部27より上側に治具48を備えても良い。
この別実施形態(h−2)では、前述した別実施形態(h−1)と同様の構成を備えるものを想定しており、支持部材48aが上端ほど後方に変位する傾斜姿勢に設定されることにより、取付台48sに載置される測位ユニット31を傾斜部26asの上端から離間させ、結果としてロプス26により測位情報の受信が妨げられる不都合を抑制できるものにしている。
この別実施形態(h−1)(h−2)の何れであっても、例えば、取付台48sを用いず、治具48の所定位置に取付ブラケット34を介して測位ユニット31を支持するように構成することが可能である。また、治具48をロプス26に保持ボルト49で固定する構成も任意の構成を採用することも可能である。
〔別実施形態i〕
(i−1)図41、図42に示すように、運転座席19の後側上方を囲うように斜め上方に延びる転倒保護用のロプス26が備えられ、このロプス26に備えた治具48の取付台48sに対し取付ブラケット34を介して測位ユニット31を支持する。ロプス26は、中空の角パイプ材を屈曲することにより縦方向に沿って延びる左右の縦フレーム部26aと、これらの上端同士を繋いで横方向に沿って延びる横フレーム部26bとを有している測位ユニット31は、衛星航法用のアンテナユニット32と、走行車体4の位置及び方位を測定する衛星航法装置33とを有して構成されている。
治具48は、外端側ほど斜め上方に向かう姿勢の左右の支持部材48aと、中央位置の取付台48sと、左右の支持部材48aの両端に形成した固定ブラケット48cとを備えている。この治具48では固定ブラケット48cに挿通する保持ボルト49によって、左右の支持部材48aの外端をロプス26に連結固定することにより支持部材48aが水平姿勢保持され、この支持部材48aに対し取付ブラケット34を介して測位ユニット31が支持される。尚、この構成では、固定ブラケット48cが縦フレーム部26aに連結する位置が、折畳部27より高い位置に設定されている。
この別実施形態(i−1)の構成では、治部28がロプス26の内部空間に向けて伸びるように形成された支持部材48aを備えている。このため、測位ユニット31は、正面視において左右の縦フレーム部26aと、上部の横フレーム部26bとで取り囲まれる空間に配置されると共に、側面視において縦フレーム部26aと一部重複する。特に、この配置では、運転座席19の背もたれ部の上端より高い位置に測位ユニット31が配置される。
また、図42に示すように、支持部材48aと、取付台48sとは中空に形成され、測位ユニット31に接続する配線40は、取付台48sの内部空間と、支持部材48aの内部空間と、ロプス26の縦フレーム部26aの内部空間を挿通する状態でコントローラ30に対して測位情報を伝える。
このような構成から、例えば、走行時に樹木の枝等が測位ユニット31に接触する不都合を阻止できる。また、ロプス26は剛性が高いためアンテナユニットの振動を抑制して計測誤差を小さくでき、運転座席19の背もたれ部の上端より上側に測位ユニット31を配置しているため、運転座席19や、運転座席に着座する操縦者が測位情報の受信を妨げる不都合を抑制する。
(i−2)図43に示すように、縦フレーム部26aのうち折畳部27より上側に上端側ほど前側に傾斜する傾斜部26asを備え、縦フレーム部26aのうち、折畳部27より上側に治具48を備える。
この別実施形態(i−2)では、前述した別実施形態(h−1)と同様に左右の縦フレーム部26aに治具48を支持するものを想定しており、傾斜部26asが上端ほど前側に傾斜する構成であるため、取付台48sに載置される測位ユニット31を傾斜部26asの上端から離間させており、結果としてロプス26により測位情報の受信が妨げられる不都合を抑制できるものにしている。
この別実施形態(i−1)(i−2)の何れであっても、例えば、取付台48sに対して直接的に測位ユニット31を支持するように構成しても良い。また、治具48をロプス26に保持ボルト49で固定する構成も任意の構成を採用することが可能である。
〔別実施形態j〕
〔j−1〕図44に示すように、剛体部材として構成される車体フレーム1の下面に固定ブラケット57を介して慣性計測装置39を固定する。この構成では、平面視において車体フレーム1の下側に重複する位置に慣性計測装置39が配置されることになる。また、慣性計測装置39は、泥除ケース58に収納され、このように泥除ケース58に収容することにより、泥や水が付着する不都合を解消するだけでなく、地面の突起物に接触して破損する不都合も解消する。
この別実施形態(j−1)でも、慣性計測装置39は、車体フレーム1で成る剛体部材に隣接する位置に配置され、慣性計測装置39は正面視において左右の後輪フェンダー24の中間位置で、側面視において後輪3と重なる位置に配置される。また、車体フレーム1の下方領域に配置されるため、装着が容易となり、慣性計測装置39を備えるために走行車体4の設計を変更する必要もない。
(j−2)図45、図46に示すように、走行車体4の前部位置から車体後部のミッションケース10に亘る領域に左右の車体フレーム1を備えることにより、左右の車体フレーム1で剛体部材を構成する。このように構成されるトラクタでは、左右の車体フレーム1にエンジン6、クラッチハウジング12等が支持され、この左右の車体フレーム1の後端にミッションケース10が連結する。
左右の車体フレーム1は、板状の鋼材で構成されるものを想定しており、左右の車体フレーム1の中間の領域に慣性計測装置39が配置される。この構成では、慣性計測装置39は、車体フレーム1で成る剛体部材に隣接する位置に配置され、慣性計測装置39は正面視において左右の後輪フェンダー24の中間位置で、側面視において後輪3と重なる位置に配置される。
(j−3)クラッチハウジング12の後端から走行車体4の後端に亘る領域に配置されるミッションケース10は、ミッションケース10を剛体部材として捉えることも可能であり、このような構成のトラクタではミッションケース10に隣接する位置に慣性計測装置39を備えても良い。また、車体フレーム1が左右一対の部材で構成されるものでは、左右の車体フレーム1の中間位置で、左右の何れか車体フレーム1に慣性計測装置39を備えても良い。
〔別実施形態k〕
(k−1)図47〜図49に示すように、車体フレーム1の前部位置に、この車体フレーム1から前方に延出する左右一対の前部フレーム60を備える。この前部フレーム60にエンジン6が支持され、このエンジン6を覆う位置にボンネット5が配置される。また、前部フレーム60に前車軸ケース61が支持され、この前車軸ケース61の左右の両端位置に前車軸62を備え、この前車軸62によって前輪2が駆動される。
このトラクタでは、運転座席19の後方位置にロプス26を備えている。このロプス26は、左右一対の縦フレーム部26aと、この上端同士を繋いで横方向に沿って延びる横フレーム部26bとを有しており、この横フレーム部26bにアンテナユニット32を有する測位ユニット31を備えている。
このような構成において、走行車体4の慣性情報を計測する慣性計測装置39が、平面視でボンネット5に重複する位置に配置されている。更に具体的には、平面視でエンジン6と重複し、平面視で前車軸ケース61に重複する。そして、慣性計測装置39は、左右の前部フレーム60の中間領域に慣性計測装置39が配置される。
また、慣性計測装置39は前輪2の車軸中心より上側に配置され、側面視で前輪2と重なる位置に重複する位置に配置されている。
このように前車軸62の中心に近い位置に慣性計測装置39を配置することにより、前輪2の前車軸62を中心に走行車体4がピッチングした場合でも慣性計測装置39の変位量が小さいため正確な計測値を得る。また、走行車体4の左右方向での中央遅角に慣性計測装置39が配置されるため、走行車体4がローリングした場合でも慣性計測装置39の変位量を小さくして一層正確な計測値を得る。
(k−2)図48に示すように、このトラクタでは、右の前輪2に制動力を作用させる右制動機構63Rと、左の前輪2に制動力を作用させる左制動機構63Lとを備え、走行車体4の旋回時に旋回外側の前輪2の周速度を、左右の後輪3の周速度の略2倍の速度で駆動する増速装置を備えている。
このように構成することにより、走行車体4を小さい半径で旋回させる場合には、右制動機構63Rと左制動機構63Lとのうち、旋回内側の前輪2に制動力を作用させることや、旋回外側の前輪2を増速装置によって増速して駆動することにより、小半径での旋回を可能にしている。
〔別実施形態L〕
(L−1)図50〜図52に示すように、左右の縦フレーム部26aの上下方向での中間部分に折畳部27を備えることにより、この折畳部27より上側を横向きの揺動支点Xを中心に折り畳み可能となるようにロプス26を構成している。更に、左右の縦フレーム部26aのうち折畳部27より上側には上端側ほど前側に傾斜する傾斜部26asを備えている。
この別実施形態(L−1)では、ロプス26の左右の縦フレーム部26aの何れか一方で、運転座席19の背もたれ部のトップより高い位置で、折畳部27より上側となる傾斜部26asの外側面に支持部材としての取付ブラケット34を取り付け、この取付ブラケット34に対して測位ユニット31を備えている。
この構成から、ボンネット5や走行車体4の一部に妨げられることや、障害物の影響を受けることなく、GPS衛星等から送信される衛星測位情報を良好に受信できる。また、ロプス26は剛性が高いため測位ユニット31を大きく振動させることもない。
(L−2)図50〜図52には、左右の縦フレーム部26aの一方に測位ユニット31を備える構成を説明したが、これに代えて、左右の縦フレーム部26aの双方に対し取付ブラケット34を介して測位ユニット31を備え、2つの測位ユニット31で測位データを取得するように構成しても良い。