JP6923446B2 - ある距離において可変磁力を有する磁気吻合デバイス - Google Patents
ある距離において可変磁力を有する磁気吻合デバイス Download PDFInfo
- Publication number
- JP6923446B2 JP6923446B2 JP2017547956A JP2017547956A JP6923446B2 JP 6923446 B2 JP6923446 B2 JP 6923446B2 JP 2017547956 A JP2017547956 A JP 2017547956A JP 2017547956 A JP2017547956 A JP 2017547956A JP 6923446 B2 JP6923446 B2 JP 6923446B2
- Authority
- JP
- Japan
- Prior art keywords
- magnetic
- compartments
- polygon
- north
- compartment
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/11—Surgical instruments, devices or methods, e.g. tourniquets for performing anastomosis; Buttons for anastomosis
- A61B17/1114—Surgical instruments, devices or methods, e.g. tourniquets for performing anastomosis; Buttons for anastomosis of the digestive tract, e.g. bowels or oesophagus
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/12—Surgical instruments, devices or methods, e.g. tourniquets for ligaturing or otherwise compressing tubular parts of the body, e.g. blood vessels, umbilical cord
- A61B17/12022—Occluding by internal devices, e.g. balloons or releasable wires
- A61B17/12131—Occluding by internal devices, e.g. balloons or releasable wires characterised by the type of occluding device
- A61B17/12163—Occluding by internal devices, e.g. balloons or releasable wires characterised by the type of occluding device having a string of elements connected to each other
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00876—Material properties magnetic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/11—Surgical instruments, devices or methods, e.g. tourniquets for performing anastomosis; Buttons for anastomosis
- A61B17/1114—Surgical instruments, devices or methods, e.g. tourniquets for performing anastomosis; Buttons for anastomosis of the digestive tract, e.g. bowels or oesophagus
- A61B2017/1117—Surgical instruments, devices or methods, e.g. tourniquets for performing anastomosis; Buttons for anastomosis of the digestive tract, e.g. bowels or oesophagus adapted for discharge after necrotisation, e.g. by evacuation, expulsion or excretion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/11—Surgical instruments, devices or methods, e.g. tourniquets for performing anastomosis; Buttons for anastomosis
- A61B2017/1139—Side-to-side connections, e.g. shunt or X-connections
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Physiology (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
- Endoscopes (AREA)
Description
本願は、米国仮出願第62/132,075号(2015年3月12日出願)の利益およびそれに対する優先権を主張し、上記出願の内容は、その全体が参照により本明細書に引用される。
本発明は、展開可能磁気圧縮デバイスと、例えば、胃腸管において吻合を作成するためのそれらの使用とに関する。デバイスは、特に、例えば、内視鏡および/または腹腔鏡技法を使用する、低侵襲性送達のために有用である。
本願明細書は、例えば、以下の項目も提供する。
(項目1)
自己開放式磁気圧縮吻合デバイスであって、前記吻合デバイスは、
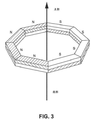
端端結合された少なくとも4つの磁性区画のアセンブリを備え、前記少なくとも4つの磁性区画は、面外軸を有する多角形を形成し、各磁性区画は、北磁極および南磁極を有し、前記アセンブリは、
第1の接続部材を用いて一緒に結合された第1の対の磁性区画と、
第2の接続部材を用いて一緒に結合された第2の対の磁性区画と
を備え、
前記アセンブリは、前記磁性区画が2列に整列させられた送達構成であって、前記2列は、前記第1および第2の接続部材、または前記第1および第2の対の磁性区画を互いに結合する1つ以上の追加の接続部材によって接合されている、送達構成と、前記第1および第2の接続部材または前記追加の接続部材のうちの少なくとも1つによって提供される力に少なくとも部分的に基づいて前記磁性区画が開放多角形を形成している展開構成とを備えている、吻合デバイス。
(項目2)
前記第1の対の磁性区画は、前記面外軸に関して互いに対して合わせられたそれらの北極を有し、前記第2の対の磁性区画は、前記面外軸に関して互いに対して合わせられたそれらの北極を有する、項目1に記載の吻合デバイス。
(項目3)
前記第1の対の磁性区画の北極は、前記面外軸に関して前記第2の対の磁性区画の北極と合わせられている、項目2に記載の吻合デバイス。
(項目4)
前記第1の対の磁性区画の北極は、前記面外軸に関して前記第2の対の磁性区画の北極と合わせられていない、項目2に記載の吻合デバイス。
(項目5)
前記第1の対の磁性区画は、前記面外軸に関して互いに対して合わせられていないそれらの北極を有し、前記第2の対の磁性区画は、前記面外軸に関して互いに対して合わせられていないそれらの北極を有する、項目1に記載の吻合デバイス。
(項目6)
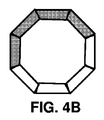
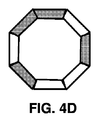
前記磁性区画の北磁極は、区画毎に前記多角形の上部および底部に関する向きにおいて交互する、項目1に記載の吻合デバイス。
(項目7)
前記アセンブリは、4つの磁性区画を備えている、項目1に記載の吻合デバイス。
(項目8)
前記多角形は、上部および底部を有し、2つの磁性区画は、前記多角形の上部に向かって配列されたそれらの北磁極を有し、2つの他の磁性区画は、前記多角形の底部に向かって配列されたそれらの北磁極を有する、項目7に記載の吻合デバイス。
(項目9)
前記磁性区画の北磁極は、区画毎に前記多角形の上部および底部に関する向きにおいて交互する、項目8に記載の吻合デバイス。
(項目10)
前記アセンブリは、第1の磁性区画と、前記第1の磁性区画に直隣接する第2の磁性区画と、前記第2の磁性区画に直隣接する第3の磁性区画と、前記第3および第1の磁性区画に直隣接する第4の磁性区画とを備えている、項目9に記載の吻合デバイス。
(項目11)
前記第1および第3の磁性区画の北磁極は、前記多角形の上部に向かって配列され、前記第2および第4の磁性区画の北磁極は、前記多角形の底部に向かって配列されている、項目10に記載の吻合デバイス。
(項目12)
前記アセンブリは、8つの磁性区画を備え、前記アセンブリは、
第3の接続部材を用いて一緒に結合された第3の対の磁性区画と、
第4の接続部材を用いて一緒に結合された第4の対の磁性区画と
をさらに備えている、項目1に記載の吻合デバイス。
(項目13)
前記送達構成にあるとき、前記磁性区画は、2列に整列させられ、前記2列は、前記第1および第3の接続部材、または前記第1、第2、第3、および第4の対の磁性区画のうちの少なくとも2つを互いに結合する1つ以上の追加の接続部材によって接合され、展開構成において、前記磁性区画は、前記第1、第2、第3、および第4の接続部材または追加の接続部材のうちの少なくとも1つによって提供される力に少なくとも部分的に基づいて、開放多角形を形成する、項目12に記載の吻合デバイス。
(項目14)
前記多角形は、上部および底部を有し、4つの磁性区画は、前記多角形の上部に向かって配列されたそれらの北磁極を有し、4つの他の磁性区画は、前記多角形の底部に向かって配列されたそれらの北磁極を有する、項目12に記載の吻合デバイス。
(項目15)
前記磁性区画の北磁極は、区画毎に前記多角形の上部および底部に関する向きにおいて交互する、項目14に記載の吻合デバイス。
(項目16)
前記アセンブリは、第1の磁性区画と、前記第1の磁性区画に直隣接する第2の磁性区画と、前記第2の磁性区画に直隣接する第3の磁性区画と、前記第3の磁性区画に直隣接する第4の磁性区画と、前記第4の磁性区画に直隣接する第5の磁性区画と、前記第5の磁性区画に直隣接する第6の磁性区画と、前記第6の磁性区画に直隣接する第7の磁性区画と、前記第1および第7の磁性区画に直隣接する第8の磁性区画とを備えている、項目15に記載の吻合デバイス。
(項目17)
前記第1、第3、第5、および第7の磁性区画の北磁極は、前記多角形の上部に向かって配列され、前記第2、第4、第6、および第8の磁性区画の北磁極は、前記多角形の底部に向かって配列されている、項目16に記載の吻合デバイス。
(項目18)
4つの隣接する磁性区画は、前記多角形の上部に向かって配列されたそれらの北磁極を有し、4つの他の隣接する磁性区画は、前記多角形の底部に向かって配列されたそれらの北磁極を有する、項目14に記載の吻合デバイス。
(項目19)
前記8つの磁性区画は、前記面外軸に関して同一方向に合わせられたそれらの北磁極を有する、項目14に記載の吻合デバイス。
(項目20)
前記接続部材のうちの1つ以上のものは、ステンレス鋼、プラスチック、またはニチノール材料を備えている、項目1に記載の吻合デバイス。
(項目21)
前記接続部材のうちの1つ以上のものは、ばねを備えている、項目1に記載の吻合デバイス。
(項目22)
前記接続部材のうちの1つ以上のものは、ヒンジを備えている、項目1に記載の吻合デバイス。
(項目23)
前記接続部材のうちの1つ以上のものは、前記多角形の外部に結合されている、項目1に記載の吻合デバイス。
(項目24)
前記接続部材のうちの1つ以上のものは、外骨格である、項目23に記載の吻合デバイス。
(項目25)
前記磁性区画は、希土類磁性材料を備えている、項目1に記載の吻合デバイス。
(項目26)
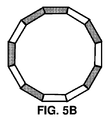
前記多角形は、正方形、六角形、八角形、十角形、十二角形、十四角形、十六角形、十八角形、および二十角形から成る群から選択される、項目1に記載の吻合デバイス。
(項目27)
前記送達構成にあるとき、前記磁性区画のアセンブリは、アクセスデバイスの作業チャネル内に収まり、患者内の解剖学的構造に送達されるようにサイズを決定されている、項目1に記載の吻合デバイス。
(項目28)
前記アセンブリは、前記アクセスデバイスの作業チャネルから排出されると、前記送達構成から前記展開構成に自発的に変換するように構成されている、項目27に記載の吻合デバイス。
(項目29)
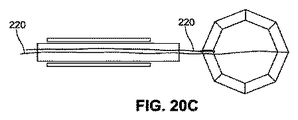
前記磁性区画のアセンブリは、ガイド要素に結合されるように構成され、前記送達構成から前記展開構成に遷移すると、前記ガイド要素の長さに沿って平行移動するように構成されている、項目1に記載の吻合デバイス。
(項目30)
吻合を形成するためのシステムであって、前記システムは、
端端結合された少なくとも4つの磁性区画のアセンブリを備えている自己開放式磁気圧縮吻合デバイスであって、前記少なくとも4つの磁性区画は、多角形を形成し、面外軸を有し、前記アセンブリは、
第1の接続部材を用いて一緒に結合された第1の対の磁性区画と、第2の接続部材を用いて一緒に結合された第2の対の磁性区画とを備え、
前記アセンブリは、前記磁性区画が2列に整列させられた送達構成であって、前記2列は、前記第1および第2の接続部材、または前記第1および第2の対の磁性区画を互いに結合する1つ以上の追加の接続部材によって接合されている、送達構成と、前記第1および第2の接続部材または前記追加の接続部材のうちの少なくとも1つによって提供される力に少なくとも部分的に基づいて前記磁性区画が開放多角形を形成している展開構成とを備えている、
自己開放式磁気圧縮吻合デバイスと、
患者内の解剖学的構造へのアクセスを提供するように構成されたアクセスデバイスであって、前記送達構成にあるとき、前記磁性区画のアセンブリは、前記アクセスデバイスの作業チャネル内に収まり、前記解剖学的構造に送達されるようにサイズを決定されている、アクセスデバイスと、
前記アクセスデバイスの作業チャネル内に収まり、前記自己開放式磁気圧縮吻合デバイスに結合されるように構成されているガイドワイヤであって、前記磁性区画のアセンブリは、前記送達構成から前記展開構成に遷移するとき、前記ガイドワイヤの長さに沿って平行移動するように構成されている、ガイドワイヤと
を備えている、システム。
(項目31)
前記アクセスデバイスの作業チャネル内に収まるように構成されているマニピュレータをさらに備え、前記マニピュレータは、前記マニピュレータが前記アクセスデバイスの作業チャネルの外に前記自己開放式磁気圧縮吻合デバイスの配置を誘導することを可能にするために、前記アクセスデバイスに対して独立して平行移動可能であるように構成されている、項目30に記載のシステム。
(項目32)
前記アクセスデバイスは、内視鏡、腹腔鏡、トロカール、およびカニューレから成る群から選択される、項目30に記載のシステム。
(項目33)
前記第1の対の磁性区画は、前記面外軸に関して互いに対して合わせられたそれらの北極を有し、前記第2の対の磁性区画は、前記面外軸に関して互いに対して合わせられたそれらの北極を有する、項目30に記載のシステム。
(項目34)
前記第1の対の磁性区画の北極は、前記面外軸に関して前記第2の対の磁性区画の北極と合わせられている、項目33に記載のシステム。
(項目35)
前記第1の対の磁性区画の北極は、前記面外軸に関して前記第2の対の磁性区画の北極と合わせられていない、項目33に記載のシステム。
(項目36)
前記第1の対の磁性区画は、前記面外軸に関して互いに対して合わせられていないそれらの北極を有し、前記第2の対の磁性区画は、前記面外軸に関して互いに対して合わせられていないそれらの北極を有する、項目30に記載のシステム。
(項目37)
前記磁性区画の北磁極は、区画毎に前記多角形の上部および底部に関する向きにおいて交互する、項目30に記載のシステム。
(項目38)
前記アセンブリは、4つの磁性区画を備えている、項目30に記載のシステム。
(項目39)
前記多角形は、上部および底部を有し、2つの磁性区画は、前記多角形の上部に向かって配列されたそれらの北磁極を有し、2つの他の磁性区画は、前記多角形の底部に向かって配列されたそれらの北磁極を有する、項目38に記載のシステム。
(項目40)
前記磁性区画の北磁極は、区画毎に前記多角形の上部および底部に関する向きにおいて交互する、項目39に記載のシステム。
(項目41)
前記アセンブリは、第1の磁性区画と、前記第1の磁性区画に直隣接する第2の磁性区画と、前記第2の磁性区画に直隣接する第3の磁性区画と、前記第3および第1の磁性区画に直隣接する第4の磁性区画とを備えている、項目40に記載のシステム。
(項目42)
前記第1および第3の磁性区画の北磁極は、前記多角形の上部に向かって配列され、前記第2および第4の磁性区画の北磁極は、前記多角形の底部に向かって配列されている、項目41に記載のシステム。
(項目43)
前記アセンブリは、8つの磁性区画を備え、前記アセンブリは、
第3の接続部材を用いて一緒に結合された第3の対の磁性区画と、
第4の接続部材を用いて一緒に結合された第4の対の磁性区画と、
をさらに備えている、項目1に記載のシステム。
(項目44)
前記送達構成にあるとき、前記磁性区画は、2列に整列させられ、前記2列は、前記第1および第3の接続部材、または前記第1、第2、第3、および第4の対の磁性区画のうちの少なくとも2つを互いに結合している1つ以上の追加の接続部材によって接合され、前記展開構成にあるとき、前記磁性区画は、前記第1、第2、第3、および第4の接続部材または追加の接続部材のうちの少なくとも1つによって提供される力に少なくとも部分的に基づいて、開放多角形を形成する、項目43に記載のシステム。
(項目45)
前記多角形は、上部および底部を有し、4つの磁性区画は、前記多角形の上部に向かって配列されたそれらの北磁極を有し、4つの他の磁性区画は、前記多角形の底部に向かって配列されたそれらの北磁極を有する、項目43に記載のシステム。
(項目46)
前記磁性区画の北磁極は、区画毎に前記多角形の上部および底部に関する向きにおいて交互する、項目45に記載のシステム。
(項目47)
前記アセンブリは、第1の磁性区画と、前記第1の磁性区画に直隣接する第2の磁性区画と、前記第2の磁性区画に直隣接する第3の磁性区画と、前記第3の磁性区画に直隣接する第4の磁性区画と、前記第4の磁性区画に直隣接する第5の磁性区画と、前記第5の磁性区画に直隣接する第6の磁性区画と、前記第6の磁性区画に直隣接する第7の磁性区画と、前記第1および第7の磁性区画に直隣接する第8の磁性区画とを備えている、項目46に記載のシステム。
(項目48)
前記第1、第3、第5、および第7の磁性区画の北磁極は、前記多角形の上部に向かって配列され、前記第2、第4、第6、および第8の磁性区画の北磁極は、前記多角形の底部に向かって配列されている、項目47に記載のシステム。
(項目49)
4つの隣接する磁性区画は、前記多角形の上部に向かって配列されたそれらの北磁極を有し、4つの他の隣接する磁性区画は、前記多角形の底部に向かって配列されたそれらの北磁極を有する、項目45に記載のシステム。
(項目50)
前記8つの磁性区画は、前記面外軸に関して同一方向に合わせられたそれらの北磁極を有する、項目45に記載のシステム。
(項目51)
前記接続部材のうちの1つ以上のものは、ステンレス鋼、プラスチック、またはニチノール材料を備えている、項目30に記載のシステム。
(項目52)
前記接続部材のうちの1つ以上のものは、ばねを備えている、項目30に記載のシステム。
(項目53)
前記接続部材のうちの1つ以上のものは、ヒンジを備えている、項目30に記載のシステム。
(項目54)
前記接続部材のうちの1つ以上のものは、前記多角形の外部に結合されている、項目30に記載のシステム。
(項目55)
前記接続部材のうちの1つ以上のものは、外骨格である、項目54に記載のシステム。
(項目56)
前記磁性区画は、希土類磁性材料を備えている、項目30に記載のシステム。
(項目57)
前記多角形は、正方形、六角形、八角形、十角形、十二角形、十四角形、十六角形、十八角形、および二十角形から成る群から選択される、項目30に記載のシステム。
(実施例1:方位ポテンシャルの計算)
方位パターンが、図24−29に示される自己開放式構成の各々に対して計算された。
1) NNNN 10)SNSN
2) NNNS 11)NSNS
3) NNSN 12)NSSS
4) NSNN 13)SNSS
5) SNNN 14)SSNS
6) NNSS 15)SSSN
7) NSSN 16)SSSS
8) SSNN
9) SNNS
中心線鏡対称により、どの端部から計算を開始するかは問題ではない。左/右パターンは、右/左からの同一パターンと同一実体であり、かつ両方向に「逆パターン(リング反転と同等のN/S交換)」と同一でなければならない。したがって、1=16、2=15=5=12、3=14=4=13、6=8、7=9、10=11であり、6つの異なるパターン:1、2、3、6、7、10のみ存在する。
構成1=16)=図9A、9B、および24。
構成2=5)=12)=15)=図25。
構成3=4)=13)=14)=図26。
構成6=8)=図9Cおよび27。
構成7=9)=図9Dおよび28。
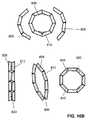
構成10=11)=図10Aおよび29。
(1)−8−8−8−8−8−8−8−8 8反発(R) +8
(2)−8−20−20−20−2 4誘引(A)/4反発(R) 0
(3)−8+20−20−20+2 6A2R −4
(6)−8000+8000 4A4R 0
(7)−80+40−80+40 6A2R −4
(10)−8+40−4+8−40+4 8R +8
計算を行うと、以下の傾向が、留意される。
構成1(図24)は、回転に伴う引力の変動の不在下においてユニークである。方位変動が存在しないが、回転力の欠如は、潜在的に、不整列デバイスならびに吻合のサイズおよび形状の偏差につながり得る。しかしながら、適切な配置を用いることで、回転井戸の欠如が問題となるであろう可能性が低い。留め継ぎの全てが、構成1では反発性となることは着目に値する(または四極区画が端部に使用される場合、ほぼ全て)。この理由から、例えば、前述のように、ガイド要素を使用して、構成1の自己開放式デバイスを展開することは有益であり得る。
構成2(図25)多数の誘引井戸、1つのみの完全深度。
構成3(図26)多数の誘引井戸、1つのみの完全深度、25%反発性障壁によって包囲される。
構成6(図27)良好なポテンシャル。構成6は、回転ポテンシャル井戸を有するが、井戸は、良好に画定され、デバイスの整列を補助する。加えて、ある距離における力は、構成1とほぼ同じ強さである。例えば、図7参照。
構成7(図28)良好なポテンシャル。若干、ある距離において力が弱く、回転井戸は、整列を促進するが、1つのデバイスの回転の180°に伴って、2つの等しい井戸が存在するので、より操縦性を提供する。
構成10(図29)多数のポテンシャル井戸、1つのみの完全深度、両側に50%反発性障壁、すなわち、複数の回転井戸は、整列をより困難にし得る。
特許、特許出願、特許刊行物、雑誌、書籍、論文、ウェブコンテンツ等の他の文書の参照および引用が、本開示全体を通して行なわれる。そのような文書は全て、あらゆる目的のために、参照することによって、全体として本明細書に組み込まれる。
本発明は、その精神または不可欠な特性から逸脱することなく、他の具体的形態で具現化され得る。前述の実施形態は、したがって、あらゆる観点において、本明細書に説明される本発明の限定ではなく、例証と見なされるものとする。本発明の範囲は、したがって、前述の説明によってではなく、添付の請求項によって示され、請求項の均等物の意味および範囲内にある全ての変更は、したがって、その中に包含されるものと意図される。
Claims (26)
- 自己開放式磁気圧縮吻合デバイスであって、前記吻合デバイスは、
端端結合された少なくとも4つの磁性区画のアセンブリを備え、前記少なくとも4つの磁性区画は、面外軸を有する多角形を形成し、各磁性区画は、北磁極および南磁極を有し、前記アセンブリは、複数の接続部材を備え、前記複数の接続部材の各々は、直隣接する2つの磁性区画を結合するように構成され、前記複数の接続部材は、第1の接続部材と、第2の接続部材と、2つ以上の追加の接続部材とを備え、前記アセンブリは、
前記第1の接続部材を用いて一緒に結合された第1の対の磁性区画と、
前記第2の接続部材を用いて一緒に結合された第2の対の磁性区画と
をさらに備え、
前記アセンブリは、前記第1の対の磁性区画および前記第2の対の磁性区画が2列に整列させられた送達構成であって、前記2列のうちの第1の列は、少なくとも前記第1の対の磁性区画を備え、前記2列のうちの第2の列は、少なくとも前記第2の対の磁性区画を備える、送達構成と、前記第1および第2の接続部材または前記追加の接続部材のうちの少なくとも1つによって提供される力に少なくとも部分的に基づいて前記磁性区画が開放多角形を形成している展開構成とを備え、
前記複数の接続部材のうちの少なくとも1つは、受動ヒンジ部材を備え、前記受動ヒンジ部材は、前記受動ヒンジ部材によって相互に結合された第1の組の直隣接する2つの磁性区画が相互に対して移動することを可能にし、前記複数の接続部材のうちの少なくとも1つは、能動開放部材を備え、前記能動開放部材は、前記能動開放部材によって相互に結合された第2の組の直隣接する2つの磁性区画の各々の外部の一部に接触しており、前記能動開放部材は、前記能動開放部材によって相互に結合された前記第2の組の直隣接する2つの磁性区画を共通軸周りに相互に対して回転させる力を提供するように構成された形状記憶材料を含み、前記共通軸は、境界線によって画定され、前記境界線を介して、前記能動開放部材によって相互に結合された直隣接する2つの磁性区画が前記送達構成において相互に接触する、吻合デバイス。 - 前記面外軸は、前記多角形に対して垂直であり、前記デバイスの上部および底部を画定し、
前記第1の対の磁性区画は、同一の方向に前記上部および底部に対して配列されたそれらの北極を有し、
前記第2の対の磁性区画は、同一の方向に前記上部および底部に対して配列されたそれらの北極を有する、請求項1に記載の吻合デバイス。 - 前記第1の対の磁性区画の北極および前記第2の対の磁性区画の北極は、同一の方向に前記上部および底部に対して配列されている、請求項2に記載の吻合デバイス。
- 前記第1の対の磁性区画の北極および前記第2の対の磁性区画の北極は、反対の方向に前記上部および底部に対して配列されている、請求項2に記載の吻合デバイス。
- 前記面外軸は、前記多角形に対して垂直であり、前記デバイスの上部および底部を画定し、
前記第1の対の磁性区画は、反対の方向に前記上部および底部に対して配列されたそれらの北極を有し、
前記第2の対の磁性区画は、反対の方向に前記上部および底部に対して配列されたそれらの北極を有する、請求項1に記載の吻合デバイス。 - 前記少なくとも4つの磁性区画の北磁極は、区画毎に前記多角形の上部および底部に関する向きにおいて交互する、請求項1に記載の吻合デバイス。
- 前記アセンブリは、4つの磁性区画を備えている、請求項1に記載の吻合デバイス。
- 前記多角形は、上部および底部を有し、2つの磁性区画は、前記多角形の上部に向かって配列されたそれらの北磁極を有し、2つの他の磁性区画は、前記多角形の底部に向かって配列されたそれらの北磁極を有する、請求項7に記載の吻合デバイス。
- 前記4つの磁性区画の北磁極は、区画毎に前記多角形の上部および底部に関する向きにおいて交互する、請求項8に記載の吻合デバイス。
- 前記アセンブリは、第1の磁性区画と、前記第1の磁性区画に直隣接する第2の磁性区画と、前記第2の磁性区画に直隣接する第3の磁性区画と、前記第3および第1の磁性区画に直隣接する第4の磁性区画とを備えている、請求項9に記載の吻合デバイス。
- 前記第1および第3の磁性区画の北磁極は、前記多角形の上部に向かって配列され、前記第2および第4の磁性区画の北磁極は、前記多角形の底部に向かって配列されている、請求項10に記載の吻合デバイス。
- 前記アセンブリは、8つの磁性区画を備え、前記アセンブリは、
第3の接続部材を用いて一緒に結合された第3の対の磁性区画と、
第4の接続部材を用いて一緒に結合された第4の対の磁性区画と
をさらに備え、前記送達構成にあるとき、前記第3の対の磁性区画および前記第4の対の磁性区画は、2列に整列させられ、前記複数の接続部材は、前記第1、第2、第3、および第4の接続部材と、4つの追加の接続部材を含み、前記4つの追加の接続部材の各々は、前記第1、第2、第3、および第4の対の磁性区画のうちの2つを相互に結合し、前記展開構成において、前記8つの磁性区画は、前記第1、第2、第3、および第4の接続部材または追加の接続部材のうちの少なくとも1つによって提供される力に少なくとも部分的に基づいて、開放多角形を形成する、請求項1に記載の吻合デバイス。 - 前記多角形は、上部および底部を有し、4つの磁性区画は、前記多角形の上部に向かって配列されたそれらの北磁極を有し、4つの他の磁性区画は、前記多角形の底部に向かって配列されたそれらの北磁極を有する、請求項12に記載の吻合デバイス。
- 前記8つの磁性区画の北磁極は、区画毎に前記多角形の上部および底部に関する向きにおいて交互する、請求項13に記載の吻合デバイス。
- 前記アセンブリは、第1の磁性区画と、前記第1の磁性区画に直隣接する第2の磁性区画と、前記第2の磁性区画に直隣接する第3の磁性区画と、前記第3の磁性区画に直隣接する第4の磁性区画と、前記第4の磁性区画に直隣接する第5の磁性区画と、前記第5の磁性区画に直隣接する第6の磁性区画と、前記第6の磁性区画に直隣接する第7の磁性区画と、前記第1および第7の磁性区画に直隣接する第8の磁性区画とを備えている、請求項14に記載の吻合デバイス。
- 前記第1、第3、第5、および第7の磁性区画の北磁極は、前記多角形の上部に向かって配列され、前記第2、第4、第6、および第8の磁性区画の北磁極は、前記多角形の底部に向かって配列されている、請求項15に記載の吻合デバイス。
- 4つの隣接する磁性区画は、前記多角形の上部に向かって配列されたそれらの北磁極を有し、4つの他の隣接する磁性区画は、前記多角形の底部に向かって配列されたそれらの北磁極を有する、請求項13に記載の吻合デバイス。
- 前記多角形は、上部および底部を有し、前記8つの磁性区画は、同一方向に前記上部および底部に対して配列されたそれらの北磁極を有する、請求項12に記載の吻合デバイス。
- 前記接続部材のうちの1つ以上のものは、ステンレス鋼、プラスチック、またはニチノール材料を備えている、請求項1に記載の吻合デバイス。
- 前記接続部材のうちの1つ以上のものは、ばねを備えている、請求項1に記載の吻合デバイス。
- 前記接続部材のうちの1つ以上のものは、前記多角形の外部に結合されている、請求項1に記載の吻合デバイス。
- 前記接続部材のうちの1つ以上のものは、外骨格である、請求項21に記載の吻合デバイス。
- 前記少なくとも4つの磁性区画は、希土類磁性材料を備えている、請求項1に記載の吻合デバイス。
- 前記多角形は、正方形、六角形、八角形、十角形、十二角形、十四角形、十六角形、十八角形、および二十角形から成る群から選択される、請求項1に記載の吻合デバイス。
- 前記送達構成にあるとき、前記少なくとも4つの磁性区画のアセンブリは、アクセスデバイスの作業チャネル内に収まり、患者内の解剖学的構造に送達されるようにサイズを決定されている、請求項1に記載の吻合デバイス。
- 前記アセンブリは、前記アクセスデバイスの作業チャネルから排出されると、前記送達構成から前記展開構成に自発的に変換するように構成されている、請求項25に記載の吻合デバイス。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021034336A JP7236752B2 (ja) | 2015-03-12 | 2021-03-04 | ある距離において可変磁力を有する磁気吻合デバイス |
| JP2022175451A JP7403879B2 (ja) | 2015-03-12 | 2022-11-01 | ある距離において可変磁力を有する磁気吻合デバイス |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562132075P | 2015-03-12 | 2015-03-12 | |
| US62/132,075 | 2015-03-12 | ||
| PCT/US2016/022209 WO2016145414A1 (en) | 2015-03-12 | 2016-03-11 | Magnetic anastomosis devices with varying magnetic force at a distance |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021034336A Division JP7236752B2 (ja) | 2015-03-12 | 2021-03-04 | ある距離において可変磁力を有する磁気吻合デバイス |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018511382A JP2018511382A (ja) | 2018-04-26 |
| JP2018511382A5 JP2018511382A5 (ja) | 2019-03-28 |
| JP6923446B2 true JP6923446B2 (ja) | 2021-08-18 |
Family
ID=55588638
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017547956A Active JP6923446B2 (ja) | 2015-03-12 | 2016-03-11 | ある距離において可変磁力を有する磁気吻合デバイス |
| JP2021034336A Active JP7236752B2 (ja) | 2015-03-12 | 2021-03-04 | ある距離において可変磁力を有する磁気吻合デバイス |
| JP2022175451A Active JP7403879B2 (ja) | 2015-03-12 | 2022-11-01 | ある距離において可変磁力を有する磁気吻合デバイス |
| JP2023018951A Pending JP2023055954A (ja) | 2015-03-12 | 2023-02-10 | ある距離において可変磁力を有する磁気吻合デバイス |
Family Applications After (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021034336A Active JP7236752B2 (ja) | 2015-03-12 | 2021-03-04 | ある距離において可変磁力を有する磁気吻合デバイス |
| JP2022175451A Active JP7403879B2 (ja) | 2015-03-12 | 2022-11-01 | ある距離において可変磁力を有する磁気吻合デバイス |
| JP2023018951A Pending JP2023055954A (ja) | 2015-03-12 | 2023-02-10 | ある距離において可変磁力を有する磁気吻合デバイス |
Country Status (7)
| Country | Link |
|---|---|
| US (3) | US10517600B2 (ja) |
| EP (1) | EP3267905A1 (ja) |
| JP (4) | JP6923446B2 (ja) |
| CN (1) | CN107889454B (ja) |
| BR (1) | BR112017019408A2 (ja) |
| MX (1) | MX2017011638A (ja) |
| WO (1) | WO2016145414A1 (ja) |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2898345T3 (es) | 2009-07-15 | 2022-03-07 | Gt Metabolic Solutions Inc | Dispositivos para un baipás gástrico sin incisión |
| US8870898B2 (en) | 2010-01-05 | 2014-10-28 | GI Windows, Inc. | Self-assembling magnetic anastomosis device having an exoskeleton |
| CN103930049B (zh) | 2011-07-12 | 2017-08-11 | 消化道肿瘤治疗研究中心 | 模块化磁吻合装置 |
| EP2934347B1 (en) | 2012-12-21 | 2023-02-22 | Ircad | Applicators for modular magnetic anastomosis device |
| EP3267905A1 (en) * | 2015-03-12 | 2018-01-17 | GI Windows Inc. | Magnetic anastomosis devices with varying magnetic force at a distance |
| JP6842427B2 (ja) * | 2015-06-05 | 2021-03-17 | テンダイン ホールディングス,インコーポレイテッド | 人工僧帽弁の経血管送達の先端制御 |
| US11304698B2 (en) | 2016-07-25 | 2022-04-19 | Virender K. Sharma | Cardiac shunt device and delivery system |
| CN109788953B (zh) | 2016-07-25 | 2022-03-08 | 维兰德.K.沙马 | 磁性吻合装置和递送系统 |
| CN110402113B (zh) | 2017-01-11 | 2023-02-17 | 维兰德.K.沙马 | 心脏分流装置和输送系统 |
| CN111031934B (zh) * | 2017-06-30 | 2024-02-20 | 加利福尼亚大学董事会 | 磁性装置、系统和方法 |
| CN108635003A (zh) * | 2018-05-15 | 2018-10-12 | 中国人民解放军陆军军医大学第三附属医院(野战外科研究所) | 一种食管吻合口狭窄组合切割装置 |
| WO2019232527A1 (en) | 2018-06-02 | 2019-12-05 | G.I. Windows, Inc. | Systems, devices, and methods for forming anastomoses |
| CN109223073A (zh) * | 2018-11-23 | 2019-01-18 | 上海安翰医疗技术有限公司 | 磁性辅助件及具有磁性辅助件的微创手术辅助装置 |
| US11554251B2 (en) * | 2019-04-30 | 2023-01-17 | Boston Scientific Scimed, Inc. | Endoscopic patch applicator |
| EP3964141A1 (en) | 2020-09-02 | 2022-03-09 | Technische Universität München | Implant and implant applicator for surgical anastomosis |
| US11576676B2 (en) | 2020-09-18 | 2023-02-14 | Gt Metabolic Solutions, Inc. | Anastomosis formation with magnetic devices having temporary retention member |
| CA3202182A1 (en) | 2020-12-18 | 2022-06-23 | Gt Metabolic Solutions, Inc. | Devices and methods for assisting magnetic compression anastomosis |
| CN117279579A (zh) | 2021-02-12 | 2023-12-22 | 梅德维尔有限公司 | 一种压缩吻合系统及其用法 |
| JP2024516146A (ja) | 2021-04-20 | 2024-04-12 | ジーアイ ウィンドウズ, インコーポレイテッド | 内視鏡または腹腔鏡磁気ナビゲーション用のシステム、装置および方法 |
| EP4329638A1 (en) | 2021-04-30 | 2024-03-06 | GT Metabolic Solutions, Inc. | Anastomosis formation with magnetic devices having bioresorbable retention member |
| WO2023052962A1 (en) | 2021-09-29 | 2023-04-06 | Cilag Gmbh International | Methods and systems for controlling cooperative surgical instruments |
| US20230100698A1 (en) | 2021-09-29 | 2023-03-30 | Cilag Gmbh International | Methods for Controlling Cooperative Surgical Instruments |
| WO2023052938A1 (en) | 2021-09-29 | 2023-04-06 | Cilag Gmbh International | Methods and systems for controlling cooperative surgical instruments |
| WO2023052934A1 (en) | 2021-09-29 | 2023-04-06 | Cilag Gmbh International | Methods and systems for controlling cooperative surgical instruments |
| US11957352B2 (en) | 2021-12-16 | 2024-04-16 | Cilag Gmbh International | Implantable sphincter assistance device with controlled homogeneous dilation of the restricting elements |
| US20230190277A1 (en) | 2021-12-16 | 2023-06-22 | Cilag Gmbh International | Implantable sphincter assistance device with concentrated or diffused bead-to-bead magnetic field interactions |
| US11957353B2 (en) | 2021-12-16 | 2024-04-16 | Cilag Gmbh International | Implantable sphincter assistance device with redirected or focused magnetic fields for interaction between adjacent beads |
| US20240065694A1 (en) * | 2022-08-25 | 2024-02-29 | G.I. Windows, Inc. | Magnetic compression anastomosis devices with multipiece internal vertebrae support structures |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050080439A1 (en) * | 2000-04-29 | 2005-04-14 | Carson Dean F. | Devices and methods for forming magnetic anastomoses and ports in vessels |
| US6663598B1 (en) | 2000-05-17 | 2003-12-16 | Scimed Life Systems, Inc. | Fluid seal for endoscope |
| EA006279B1 (ru) * | 2001-08-24 | 2005-10-27 | Дзе Осси Кидз Той Компани Пти Лимитед | Переключаемое магнитное устройство |
| US7695427B2 (en) * | 2002-04-26 | 2010-04-13 | Torax Medical, Inc. | Methods and apparatus for treating body tissue sphincters and the like |
| US20080051626A1 (en) | 2006-08-28 | 2008-02-28 | Olympus Medical Systems Corp. | Fistulectomy method between first duct and second duct, ultrasonic endoscope, catheter with balloon, magnet retaining device, and magnet set |
| EP2086426B1 (en) * | 2006-11-10 | 2013-07-31 | Cook Medical Technologies LLC | Ring magnets for surgical procedures |
| EP2207488B1 (en) * | 2007-10-09 | 2012-09-26 | Cook Medical Technologies LLC | Magnetic anastomosis device having improved delivery |
| US8870898B2 (en) * | 2010-01-05 | 2014-10-28 | GI Windows, Inc. | Self-assembling magnetic anastomosis device having an exoskeleton |
| US9332990B2 (en) * | 2010-12-30 | 2016-05-10 | Wake Forest University Health Sciences | Ureter to ileal conduit anastomosis using magnetic compression and related delivery devices and methods |
| CN103930049B (zh) * | 2011-07-12 | 2017-08-11 | 消化道肿瘤治疗研究中心 | 模块化磁吻合装置 |
| CN202437231U (zh) * | 2012-02-06 | 2012-09-19 | 徐忠法 | 磁力压迫吻合球 |
| CN102835985A (zh) * | 2012-08-15 | 2012-12-26 | 西安交通大学 | 一种限制性门腔分流磁性吻合环 |
| EP3267905A1 (en) * | 2015-03-12 | 2018-01-17 | GI Windows Inc. | Magnetic anastomosis devices with varying magnetic force at a distance |
-
2016
- 2016-03-11 EP EP16711492.5A patent/EP3267905A1/en active Pending
- 2016-03-11 WO PCT/US2016/022209 patent/WO2016145414A1/en active Application Filing
- 2016-03-11 CN CN201680026711.3A patent/CN107889454B/zh active Active
- 2016-03-11 BR BR112017019408A patent/BR112017019408A2/pt not_active Application Discontinuation
- 2016-03-11 MX MX2017011638A patent/MX2017011638A/es unknown
- 2016-03-11 JP JP2017547956A patent/JP6923446B2/ja active Active
- 2016-03-11 US US15/068,441 patent/US10517600B2/en active Active
-
2018
- 2018-05-29 US US15/991,242 patent/US10874397B2/en active Active
-
2020
- 2020-11-09 US US17/092,883 patent/US20210161532A1/en active Pending
-
2021
- 2021-03-04 JP JP2021034336A patent/JP7236752B2/ja active Active
-
2022
- 2022-11-01 JP JP2022175451A patent/JP7403879B2/ja active Active
-
2023
- 2023-02-10 JP JP2023018951A patent/JP2023055954A/ja active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| BR112017019408A2 (pt) | 2018-04-24 |
| JP7403879B2 (ja) | 2023-12-25 |
| US10517600B2 (en) | 2019-12-31 |
| JP2022190012A (ja) | 2022-12-22 |
| US10874397B2 (en) | 2020-12-29 |
| US20210161532A1 (en) | 2021-06-03 |
| US20180271531A1 (en) | 2018-09-27 |
| US20160262761A1 (en) | 2016-09-15 |
| CN107889454A (zh) | 2018-04-06 |
| JP2023055954A (ja) | 2023-04-18 |
| JP2018511382A (ja) | 2018-04-26 |
| EP3267905A1 (en) | 2018-01-17 |
| WO2016145414A1 (en) | 2016-09-15 |
| CN107889454B (zh) | 2021-06-22 |
| JP7236752B2 (ja) | 2023-03-10 |
| JP2021098077A (ja) | 2021-07-01 |
| MX2017011638A (es) | 2018-11-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7403879B2 (ja) | ある距離において可変磁力を有する磁気吻合デバイス | |
| US11596408B2 (en) | Magnetic anastomosis devices and methods of delivery | |
| US10779831B2 (en) | Systems, devices, and methods for forming anastomoses | |
| US11864767B2 (en) | Self-assembling magnetic anastomosis device having an exoskeleton | |
| US11395659B2 (en) | Method and apparatus for joining hollow organ sections in anastomosis | |
| US20210244415A1 (en) | Methods for partial diversion of the intestinal tract | |
| US11751877B2 (en) | Systems, devices, and methods for forming anastomoses | |
| EP3549534A1 (en) | Modular magnetic anastomosis device | |
| US11832820B2 (en) | Devices and methods for assisting magnetic compression anastomosis | |
| EP2849655B1 (en) | Self-assembling magnetic anastomosis device having an exoskeleton | |
| US20230255624A1 (en) | Systems, devices, and methods for delivering and positioning magnetic anastomosis compression devices for subsequent formation of anastomoses |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190214 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190214 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191211 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191213 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20200310 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20200508 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200611 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201102 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20210201 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210304 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210728 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210729 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6923446 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |