JP6889828B2 - 運転操作提案方法及び運転操作提案システム - Google Patents
運転操作提案方法及び運転操作提案システム Download PDFInfo
- Publication number
- JP6889828B2 JP6889828B2 JP2016196289A JP2016196289A JP6889828B2 JP 6889828 B2 JP6889828 B2 JP 6889828B2 JP 2016196289 A JP2016196289 A JP 2016196289A JP 2016196289 A JP2016196289 A JP 2016196289A JP 6889828 B2 JP6889828 B2 JP 6889828B2
- Authority
- JP
- Japan
- Prior art keywords
- driving operation
- vehicle
- shift
- range
- model
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















Landscapes
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Control Of Transmission Device (AREA)
Description
図1を参照して、本発明の第1実施形態に係る運転操作提案システム100の全体構成図について説明する。図1に示すように、運転操作提案システム100は、データセンタ1と、ネットワーク2と、複数の車両3とを備える。複数の車両3は、ネットワーク2を介して、データセンタ1と双方向通信を行う。ネットワーク2は、各種情報を送受信可能な通信網である。例えば、ネットワーク2は、電気通信事業者により設置された専用線、公衆交換電話網、衛星通信回線、移動体通信回線等の各種通信回線で構成される。なお、複数の車両3には自車両も含まれる。
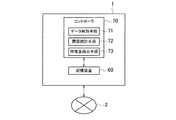
次に、本発明の第2実施形態について図12〜図17を用いて説明する。図12に示すように第2実施形態が第1実施形態と相違するのは、コントローラ70がさらに比較手段74を備えることである。第1実施形態と重複する構成については符号を引用してその説明は省略することとし、以下、相違点を中心に説明する。
2 ネットワーク
3 車両
10 GPS受信機
11 車速センサ
12 アクセル開度センサ
13 ブレーキストロークセンサ
14 シフトセンサ
15 燃料消費量取得部
16 ナビゲーション装置
20、60 記憶装置
30 車両コントローラ
31 送受信手段
32 判定手段
33 提案手段
40 スピーカ
41 ディスプレイ
70 コントローラ
71 データ判別手段
72 履歴統計手段
73 特徴量抽出手段
74 比較手段
100 運転操作提案システム
Claims (9)
- 複数の車両から、シフト操作に関する運転操作情報と、前記シフト操作を行った際の車両環境に関する車両環境情報とを受信し、記憶装置に記憶させ、
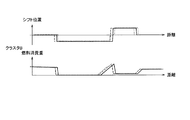
前記運転操作情報と前記車両環境情報とに基づいて、前記シフト操作の開始から終了までの範囲を含む区間である燃費走行操作範囲における燃料消費量を低減する運転操作モデルを生成し、
前記燃費走行操作範囲に接近した際に前記運転操作モデルをドライバに提案し、
前記シフト操作の開始とはシフト位置の変更であり、前記シフト操作の終了とはシフト位置を変更前の位置に戻す操作である
ことを特徴とする運転操作提案方法。 - 前記燃費走行操作範囲の燃料消費量を算出し、算出した燃料消費量がもっとも少ない運転操作モデルを提案することを特徴とする請求項1に記載の運転操作提案方法。
- 前記燃費走行操作範囲の前記運転操作モデルと、前記燃費走行操作範囲の自車両の前記運転操作情報とを比較し、前記運転操作モデルと前記自車両の前記運転操作情報とが異なる場合に、前記運転操作モデルを提案することを特徴とする請求項2に記載の運転操作提案方法。
- 前記運転操作情報は、シフトダウンを含むことを特徴とする請求項2または3に記載の運転操作提案方法。
- 前記運転操作情報は、シフトアップを含むことを特徴とする請求項2または3に記載の運転操作提案方法。
- 前記燃費走行操作範囲が所定時間内に終了しかつ開始する場合、連続する燃費走行操作範囲のすべてを含む範囲で前記運転操作モデルを生成することを特徴とする請求項4または5に記載の運転操作提案方法。
- 前記燃費走行操作範囲の手前で1回目の提案を行い、前記燃費走行操作範囲に前記車両が入った場合、前記1回目の提案とは異なる方法で2回目の提案を行うことを特徴とする請求項2〜6のいずれか1項に記載の運転操作提案方法。
- 前記燃費走行操作範囲の前記運転操作モデルと自車両の前記運転操作情報とを用いて、前記燃費走行操作範囲の手前で1回目の提案を行い、前記自車両が前記運転操作モデルと同じ操作をしたことがあると判定し、かつ前記自車両が前記燃費走行操作範囲に入った際に前記自車両が前記運転操作モデルと同じ操作をしていない場合、前記1回目の提案とは異なる手法で2回目の提案を行い、
前記自車両が前記運転操作モデルと同じ操作をしたことがあると判定し、かつ前記自車両が前記燃費走行操作範囲に入った際に前記自車両が前記運転操作モデルと同じ操作をした場合、2回目の提案を控え、
前記自車両が前記運転操作モデルと同じ操作をしたことがないと判定した場合、前記1回目の提案とは異なる手法で2回目の提案を行う
ことを特徴とする請求項2〜7のいずれか1項に記載の運転操作提案方法。 - 複数の車両から、シフト操作に関する運転操作情報と、前記シフト操作を行った際の車両環境に関する車両環境情報とを受信し、記憶する記憶装置と、
前記記憶装置に記憶された前記運転操作情報と前記車両環境情報とに基づいて、前記シフト操作の開始から終了までの範囲を含む区間である燃費走行操作範囲における燃料消費量を低減する運転操作モデルを生成し、前記燃費走行操作範囲に接近した際に前記運転操作モデルをドライバに提案するコントローラとを備え、
前記シフト操作の開始とはシフト位置の変更であり、前記シフト操作の終了とはシフト位置を変更前の位置に戻す操作である
ことを特徴とする運転操作提案システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016196289A JP6889828B2 (ja) | 2016-10-04 | 2016-10-04 | 運転操作提案方法及び運転操作提案システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016196289A JP6889828B2 (ja) | 2016-10-04 | 2016-10-04 | 運転操作提案方法及び運転操作提案システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018060309A JP2018060309A (ja) | 2018-04-12 |
| JP6889828B2 true JP6889828B2 (ja) | 2021-06-18 |
Family
ID=61908486
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016196289A Active JP6889828B2 (ja) | 2016-10-04 | 2016-10-04 | 運転操作提案方法及び運転操作提案システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6889828B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102020110866B4 (de) * | 2020-04-22 | 2025-03-20 | Mercedes-Benz Group AG | Verfahren zur Ausgabe von Empfehlungen zum energieeffizienten Bedienen eines Fahrzeugs durch ein vom Fahrzeug umfasstes Assistenzsystem |
| JP7157121B2 (ja) * | 2020-11-10 | 2022-10-19 | 矢崎総業株式会社 | 運転管理装置、車載器及び運転管理システム |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007248185A (ja) * | 2006-03-15 | 2007-09-27 | Denso Corp | 省エネ運転支援システム |
| JP5051542B2 (ja) * | 2008-03-27 | 2012-10-17 | 株式会社エクォス・リサーチ | ドライバモデル処理装置 |
| JP5375805B2 (ja) * | 2010-11-26 | 2013-12-25 | トヨタ自動車株式会社 | 運転支援システム及び運転支援管理センター |
| JP5510471B2 (ja) * | 2012-01-20 | 2014-06-04 | トヨタ自動車株式会社 | 運転モデルの作成装置及び運転モデルの作成方法、並びに運転評価装置及び運転評価方法、並びに運転支援システム |
| JP6046528B2 (ja) * | 2013-03-15 | 2016-12-14 | 株式会社デンソーアイティーラボラトリ | 運転支援装置、運転支援方法、及びプログラム |
-
2016
- 2016-10-04 JP JP2016196289A patent/JP6889828B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018060309A (ja) | 2018-04-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107709127B (zh) | 驾驶辅助方法和装置、自动驾驶控制装置、车辆、记录介质 | |
| JP6731619B2 (ja) | 情報処理システム、情報処理方法、およびプログラム | |
| JP5510471B2 (ja) | 運転モデルの作成装置及び運転モデルの作成方法、並びに運転評価装置及び運転評価方法、並びに運転支援システム | |
| JP5375805B2 (ja) | 運転支援システム及び運転支援管理センター | |
| JP6052530B1 (ja) | 情報処理システム、情報処理方法、およびプログラム | |
| CN107531244B (zh) | 信息处理系统、信息处理方法、以及记录介质 | |
| US7519471B2 (en) | Driving support methods, apparatus, and programs | |
| JP5434912B2 (ja) | 運転状態判定方法、運転状態判定システム及びプログラム | |
| CN101357634A (zh) | 控制车辆行驶的设备和方法 | |
| JP2009149286A (ja) | 経済運転案内システム | |
| WO2016170763A1 (ja) | 運転支援方法およびそれを利用した運転支援装置、自動運転制御装置、車両、運転支援プログラム | |
| JP2014135061A (ja) | 運転評価装置及び運転評価方法、並びに運転支援システム | |
| CN109094560B (zh) | 一种自适应巡航方法及装置 | |
| CN103129556A (zh) | 行驶辅助系统 | |
| JP2005186674A (ja) | 運転傾向推定装置 | |
| JP6889828B2 (ja) | 運転操作提案方法及び運転操作提案システム | |
| US11209283B2 (en) | Information processing apparatus, information processing system, storage unit storing information processing program, and information processing meihod | |
| WO2018070475A1 (ja) | 走行制御装置、走行制御方法、及びプログラム | |
| JP4893595B2 (ja) | シフト制御装置、シフト制御方法およびシフト制御プログラム | |
| EP2857248B1 (en) | Method for displaying information pertaining to efficient driving of a motor vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190826 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200817 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201006 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201204 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210422 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210505 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6889828 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |