JP6883903B2 - ロボットの安全性向上方法及び安全性評価方法 - Google Patents
ロボットの安全性向上方法及び安全性評価方法 Download PDFInfo
- Publication number
- JP6883903B2 JP6883903B2 JP2020524025A JP2020524025A JP6883903B2 JP 6883903 B2 JP6883903 B2 JP 6883903B2 JP 2020524025 A JP2020524025 A JP 2020524025A JP 2020524025 A JP2020524025 A JP 2020524025A JP 6883903 B2 JP6883903 B2 JP 6883903B2
- Authority
- JP
- Japan
- Prior art keywords
- robot
- collision
- test
- safety
- pressure
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 45
- 238000011156 evaluation Methods 0.000 title claims description 31
- 230000006872 improvement Effects 0.000 title description 3
- 238000012360 testing method Methods 0.000 claims description 274
- 208000027418 Wounds and injury Diseases 0.000 claims description 64
- 230000006378 damage Effects 0.000 claims description 64
- 208000014674 injury Diseases 0.000 claims description 64
- 230000001939 inductive effect Effects 0.000 claims description 59
- 239000012636 effector Substances 0.000 claims description 29
- 230000008859 change Effects 0.000 claims description 20
- 230000008520 organization Effects 0.000 claims description 17
- 238000005259 measurement Methods 0.000 claims description 9
- 230000036544 posture Effects 0.000 description 32
- 238000010586 diagram Methods 0.000 description 14
- 230000008569 process Effects 0.000 description 10
- 238000006073 displacement reaction Methods 0.000 description 6
- 238000004088 simulation Methods 0.000 description 6
- 230000037394 skin elasticity Effects 0.000 description 3
- 238000004364 calculation method Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000001965 increasing effect Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 241000282412 Homo Species 0.000 description 1
- 238000004422 calculation algorithm Methods 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 239000012852 risk material Substances 0.000 description 1
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
- B25J9/1671—Programme controls characterised by programming, planning systems for manipulators characterised by simulation, either to verify existing program or to create and verify new program, CAD/CAM oriented, graphic oriented programming systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1602—Programme controls characterised by the control system, structure, architecture
- B25J9/1605—Simulation of manipulator lay-out, design, modelling of manipulator
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
- B25J9/1664—Programme controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
- B25J9/1666—Avoiding collision or forbidden zones
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1674—Programme controls characterised by safety, monitoring, diagnostic
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form
- G05B19/4155—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form characterised by programme execution, i.e. part programme or machine function execution, e.g. selection of a programme
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three dimensional [3D] modelling, e.g. data description of 3D objects
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40201—Detect contact, collision with human
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40202—Human robot coexistence
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40317—For collision avoidance and detection
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/50—Machine tool, machine tool null till machine tool work handling
- G05B2219/50391—Robot
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- General Physics & Mathematics (AREA)
- Software Systems (AREA)
- Geometry (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Manufacturing & Machinery (AREA)
- Computer Graphics (AREA)
- Manipulator (AREA)
Description

Claims (20)
- 実際のロボットの形状情報を含むテストロボットの3次元映像又は3次元模型を獲得する段階;
前記テストロボットの移動時間情報及び移動経路情報を含むプロファイル情報を入力し、前記テストロボットの移動時間及び移動経路を設定する段階;
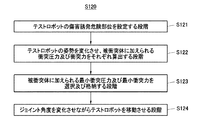
前記テストロボットの傷害誘発危険部位に対する形状、有効質量、移動速度、及び方向を考慮して被衝突体に加えられる衝突圧力及び衝突力を一定時間ごとに獲得し、一定時間ごとに獲得した前記衝突圧力及び衝突力の大きさが既に設定された最大衝突圧力及び最大衝突力の大きさ内に該当するかどうかを判断し、前記ロボットの安全性を評価する段階;
前記衝突圧力及び衝突力の大きさが前記既に設定された最大衝突圧力及び最大衝突力の大きさより大きいと、前記衝突圧力及び衝突力の大きさが前記最大衝突圧力及び最大衝突力の大きさを満足する最大速度を算出する段階;及び
前記テストロボットが前記算出された最大速度で動けるように前記プロファイル情報を修正し、前記テストロボットの移動時間及び移動経路を再設定する段階;
を含むロボットの安全性向上方法。 - 前記テストロボットは、
シミュレーションプログラムに前記ロボットの形状情報を入力して形成された3次元映像であるか、又は3次元計測センサを通じて形成された3次元模型である、請求項1に記載のロボットの安全性向上方法。 - 前記シミュレーションプログラムはCAE(Computer Aided Engineering)プログラムである、請求項2に記載のロボットの安全性向上方法。
- 前記最大衝突圧力及び最大衝突力の大きさは国際標準化機構(ISO)規格による、請求項1に記載のロボットの安全性向上方法。
- 前記テストロボットは、少なくとも1自由度を有するマニピュレータに形成された、請求項1に記載のロボットの安全性向上方法。
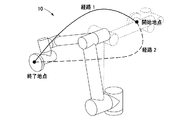
- 前記テストロボットは、ジョイントを介して連結された少なくとも2個のリンク部と、前記リンク部のうち一つに連結されたエンドエフェクタと、を含み、
前記傷害誘発危険部位は、前記リンク部及びエンドエフェクタから選ばれた一つ又は二つ以上である、請求項1に記載のロボットの安全性向上方法。 - 前記ロボットの安全性を評価する段階は、
前記テストロボットのジョイント角度を調節し、前記リンク部及びエンドエフェクタの姿勢を変化させる段階と、
前記姿勢の変化に従って前記被衝突体に加えられる最小衝突圧力及び最小衝突力を一定時間ごとに獲得する段階と、
前記最小衝突圧力及び最小衝突力に対応する角度で前記ジョイント角度を一定時間ごとに変化させながら前記テストロボットを移動させる段階;
をさらに含む、請求項6に記載のロボットの安全性向上方法。 - 前記ロボットの安全性を評価する段階は、
前記テストロボットの各部位別形状によって前記被衝突体に加えられる接触圧力を算出し、前記算出された接触圧力値を通じて前記テストロボットに対する少なくとも一つの傷害誘発危険部位を設定する段階をさらに含む、請求項1に記載のロボットの安全性向上方法。 - 実際のマニピュレータの形状情報を含み、少なくとも1自由度を有するテストマニピュレータの3次元映像又は3次元模型を獲得する段階;
前記テストマニピュレータの移動時間情報及び移動経路情報を含むプロファイル情報を入力し、前記テストマニピュレータの移動時間及び移動経路を設定する段階;
前記テストマニピュレータの各部位別形状によって被衝突体に加えられる接触圧力を算出し、前記算出された接触圧力値を通じて前記テストマニピュレータに対する少なくとも一つの傷害誘発危険部位を設定する段階;
前記テストマニピュレータの傷害誘発危険部位に対する有効質量、移動速度、及び方向を考慮して前記被衝突体に加えられる衝突圧力及び衝突力を一定時間ごとに獲得し、前記衝突圧力及び衝突力の大きさが既に設定された最大衝突圧力及び最大衝突力の大きさ内に該当するかどうかを判断し、前記マニピュレータの安全性を評価する段階;
前記衝突圧力及び衝突力の大きさが前記既に設定された最大衝突圧力及び最大衝突力の大きさより大きいと、前記衝突圧力及び衝突力の大きさが前記最大衝突圧力及び最大衝突力の大きさ内に該当する移動方向別最大速度を算出する段階:及び
前記テストマニピュレータが前記算出された最大速度で動けるように前記プロファイル情報を修正し、前記テストマニピュレータの移動時間及び移動経路を再設定する段階;
を含むロボットの安全性向上方法。 - 前記テストマニピュレータは、
シミュレーションプログラムに前記マニピュレータの形状情報を入力して形成された3次元映像であるか、又は3次元計測センサを通じて形成された3次元模型である、請求項9に記載のロボットの安全性向上方法。 - 前記シミュレーションプログラムはCAE(Computer Aided Engineering)プログラムである、請求項10に記載のロボットの安全性向上方法。
- 前記最大衝突圧力及び最大衝突力の大きさは国際標準化機構(ISO)規格による、請求項9に記載のロボットの安全性向上方法。
- 前記テストマニピュレータは、ジョイントを介して連結された少なくとも2個のリンク部と、前記リンク部のうち一つに連結されたエンドエフェクタと、を含み、
前記傷害誘発危険部位は、前記リンク部及びエンドエフェクタから選ばれた一つ又は二つ以上である、請求項9に記載のロボットの安全性向上方法。 - 前記マニピュレータの安全性を評価する段階は、
前記テストマニピュレータのジョイント角度を調節し、前記リンク部及びエンドエフェクタの姿勢を変化させる段階と、
前記姿勢の変化に従って前記被衝突体に加えられる最小衝突圧力及び最小衝突力を一定時間ごとに獲得する段階と、
前記最小衝突圧力及び最小衝突力に対応する角度で前記ジョイント角度を一定時間ごとに変化させながら前記テストマニピュレータを移動させる段階と、
をさらに含む、請求項13に記載のロボットの安全性向上方法。 - 実際のロボットの形状情報を含むテストロボットの3次元映像又は3次元模型を獲得する段階;
前記テストロボットの移動時間情報及び移動経路情報を含むプロファイル情報を入力し、前記テストロボットの移動時間及び移動経路を設定する段階;
前記テストロボットの傷害誘発危険部位に対する形状、有効質量、移動速度、及び方向を考慮して被衝突体に加えられる衝突圧力及び衝突力を算出する段階;及び
前記算出された衝突圧力及び衝突力の大きさが既に設定された最大衝突圧力及び最大衝突力の大きさ内に該当するかどうかを判断し、前記ロボットの安全性を評価する段階;
を含むロボットの安全性評価方法。 - 前記テストロボットは、
シミュレーションプログラムに前記ロボットの形状情報を入力して形成された3次元映像であるか、又は3次元計測センサを通じて形成された3次元模型である、請求項15に記載のロボットの安全性評価方法。 - 前記シミュレーションプログラムはCAE(Computer Aided Engineering)プログラムである、請求項16に記載のロボットの安全性評価方法。
- 前記衝突圧力及び衝突力の大きさが前記最大衝突圧力及び最大衝突力の大きさ以上であると、前記被衝突体に加えられる衝突圧力及び衝突力が前記最大衝突圧力及び最大衝突力の大きさ未満になるように前記テストロボットの速度を制御する、請求項15に記載のロボットの安全性評価方法。
- 前記最大衝突圧力及び最大衝突力の大きさは国際標準化機構(ISO)規格による、請求項15に記載のロボットの安全性評価方法。
- 前記テストロボットは1自由度以上のマニピュレータに形成された、請求項15に記載のロボットの安全性評価方法。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020170143813A KR101976358B1 (ko) | 2017-10-31 | 2017-10-31 | 로봇의 안전성 향상 방법 |
| KR10-2017-0143802 | 2017-10-31 | ||
| KR10-2017-0143813 | 2017-10-31 | ||
| KR1020170143802A KR102003126B1 (ko) | 2017-10-31 | 2017-10-31 | 로봇의 안전성 평가 방법 |
| PCT/KR2018/013056 WO2019088681A1 (ko) | 2017-10-31 | 2018-10-31 | 로봇의 안전성 향상 및 안전성 평가 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021501062A JP2021501062A (ja) | 2021-01-14 |
| JP6883903B2 true JP6883903B2 (ja) | 2021-06-09 |
Family
ID=66332112
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020524025A Active JP6883903B2 (ja) | 2017-10-31 | 2018-10-31 | ロボットの安全性向上方法及び安全性評価方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11511429B2 (ja) |
| JP (1) | JP6883903B2 (ja) |
| WO (1) | WO2019088681A1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11590660B2 (en) | 2018-09-26 | 2023-02-28 | Disney Enterprises, Inc. | Interactive autonomous robot configured for deployment within a social environment |
| JP7475841B2 (ja) * | 2019-11-22 | 2024-04-30 | キヤノン株式会社 | 情報処理方法、ロボットシステム、物品の製造方法、および情報処理装置 |
| CN111152264B (zh) * | 2020-01-03 | 2021-06-11 | 北京理工大学 | 一种用于检测协作机器人碰撞力和功率的精密测量模块 |
| US11816754B2 (en) | 2020-03-13 | 2023-11-14 | Omron Corporation | Measurement parameter optimization method and device, and computer control program stored on computer-readable storage medium |
| CN111251335B (zh) * | 2020-03-24 | 2021-06-08 | 桂林电子科技大学 | 基于包围盒算法的高精度机械臂碰撞检测方法 |
| CN111504328B (zh) * | 2020-05-22 | 2022-07-08 | 梅卡曼德(北京)机器人科技有限公司 | 机器人运动规划方法、路径规划方法、抓取方法及其装置 |
| DE102021208576B3 (de) * | 2021-08-06 | 2022-10-06 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung eingetragener Verein | Vorgeben einer zulässigen Maximalgeschwindigkeit eines robotischen Gerätes |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6678582B2 (en) | 2002-05-30 | 2004-01-13 | Kuka Roboter Gmbh | Method and control device for avoiding collisions between cooperating robots |
| US7181314B2 (en) * | 2003-11-24 | 2007-02-20 | Abb Research Ltd. | Industrial robot with controlled flexibility and simulated force for automated assembly |
| FR2868180B1 (fr) * | 2004-03-24 | 2006-06-16 | Commissariat Energie Atomique | Procede et dispositif de simulation interactive du contact entre objets |
| EP1870211B1 (en) | 2006-06-22 | 2019-02-27 | Honda Research Institute Europe GmbH | Method for controlling a robot by assessing the fitness of a plurality of simulated behaviours |
| WO2010004744A1 (ja) | 2008-07-09 | 2010-01-14 | パナソニック株式会社 | 経路危険性評価装置 |
| JP5983170B2 (ja) * | 2012-08-10 | 2016-08-31 | 株式会社デンソーウェーブ | ロボットのシミュレーション装置 |
| CN103894807A (zh) * | 2012-12-28 | 2014-07-02 | Abb技术有限公司 | 降低操作员潜在伤害的方法和装置 |
| JP5910647B2 (ja) * | 2014-02-19 | 2016-04-27 | トヨタ自動車株式会社 | 移動ロボットの移動制御方法 |
| DE102014007624A1 (de) | 2014-05-23 | 2015-11-26 | Daimler Ag | Verfahren zum Ermitteln von die Bewegung eines Roboters beeinflussenden Größen |
| DE102014011012A1 (de) * | 2014-07-24 | 2016-01-28 | Kuka Roboter Gmbh | Verfahren und Mittel zum Auslegen und/oder Betreiben eines Roboters |
| JP5931167B1 (ja) * | 2014-12-11 | 2016-06-08 | ファナック株式会社 | 人間協調型ロボットシステム |
| US9789610B1 (en) * | 2015-09-02 | 2017-10-17 | X Development Llc | Safe path planning for collaborative robots |
| DE102016002564A1 (de) * | 2016-03-03 | 2016-08-18 | Daimler Ag | Verfahren zur Optimierung einer Taktzeit eines Roboters |
| WO2018051151A1 (en) * | 2016-09-14 | 2018-03-22 | Siemens Industry Software Ltd. | A method and a system for simulating and certifying safety management for an area of a production plant |
-
2018
- 2018-10-31 US US16/760,265 patent/US11511429B2/en active Active
- 2018-10-31 JP JP2020524025A patent/JP6883903B2/ja active Active
- 2018-10-31 WO PCT/KR2018/013056 patent/WO2019088681A1/ko active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021501062A (ja) | 2021-01-14 |
| US20210362338A1 (en) | 2021-11-25 |
| WO2019088681A1 (ko) | 2019-05-09 |
| US11511429B2 (en) | 2022-11-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6883903B2 (ja) | ロボットの安全性向上方法及び安全性評価方法 | |
| US10335951B2 (en) | Information processing apparatus, information processing method, robot control apparatus, and robot system | |
| JP3975959B2 (ja) | ロボット動作規制方法とその装置およびそれを備えたロボット | |
| KR101976358B1 (ko) | 로봇의 안전성 향상 방법 | |
| JP6748145B2 (ja) | ロボットシステム | |
| US20220297321A1 (en) | Device, method and program for estimating weight and position of gravity center of load by using robot | |
| JP6450273B2 (ja) | 移動ロボットの動作環境情報生成装置 | |
| CN110919627B (zh) | 机器人的控制方法及控制装置 | |
| US10493935B2 (en) | Method for controlling an occupant protection system of a vehicle, and control device | |
| KR102003126B1 (ko) | 로봇의 안전성 평가 방법 | |
| KR102289375B1 (ko) | 그래픽 정보를 이용한 실시간 로봇 충돌 위험도 모니터링이 가능한 충돌 물리력 빅데이터 기반 로봇 안전성 평가 방법 | |
| WO2017141567A1 (ja) | 作業領域推定装置、制御装置、制御システム、作業領域推定方法およびプログラム | |
| WO2020222392A1 (ko) | 그래픽 정보를 이용한 실시간 로봇 충돌 위험도 모니터링이 가능한 충돌 물리력 빅데이터 기반 로봇 안전성 평가 방법 | |
| Lemmerz et al. | A hybrid collaborative operation for human-robot interaction supported by machine learning | |
| US11919171B2 (en) | Robot controller | |
| KR102759672B1 (ko) | 로봇의 안전성 평가 방법 | |
| KR102732695B1 (ko) | 로봇의 안전성 평가 방법 | |
| KR20250023285A (ko) | 로봇의 안전성 평가 및 안전성 향상 방법 | |
| KR20250023286A (ko) | 로봇의 안전성 평가 및 안전성 향상 방법 | |
| KR101968751B1 (ko) | 충돌 감지 장치, 그를 갖는 엔드 이펙터, 로봇 및 그를 이용한 충돌 감지 방법 | |
| JP2010009143A (ja) | 柔軟物体の変形形状算出方法及びプログラム | |
| CN116490252A (zh) | 信息处理设备、系统、信息处理方法和程序 | |
| KR20170112460A (ko) | 로봇 | |
| KR20250023284A (ko) | 로봇의 안전성 평가 및 안전성 향상 방법 | |
| CN107924181B (zh) | 作业区域推断装置及方法、控制装置、系统及存储介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200428 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200428 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210420 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210428 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6883903 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |