JP6877382B2 - 列車制御情報伝達システム - Google Patents
列車制御情報伝達システム Download PDFInfo
- Publication number
- JP6877382B2 JP6877382B2 JP2018061094A JP2018061094A JP6877382B2 JP 6877382 B2 JP6877382 B2 JP 6877382B2 JP 2018061094 A JP2018061094 A JP 2018061094A JP 2018061094 A JP2018061094 A JP 2018061094A JP 6877382 B2 JP6877382 B2 JP 6877382B2
- Authority
- JP
- Japan
- Prior art keywords
- train
- railroad crossing
- control information
- ground element
- train control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/40—Adaptation of control equipment on vehicle for remote actuation from a stationary place
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L23/00—Control, warning, or like safety means along the route or between vehicles or vehicle trains
- B61L23/02—Control, warning, or like safety means along the route or between vehicles or vehicle trains for indicating along the route the failure of brakes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L3/00—Devices along the route for controlling devices on the vehicle or vehicle train, e.g. to release brake, to operate a warning signal
- B61L3/02—Devices along the route for controlling devices on the vehicle or vehicle train, e.g. to release brake, to operate a warning signal at selected places along the route, e.g. intermittent control simultaneous mechanical and electrical control
- B61L3/08—Devices along the route for controlling devices on the vehicle or vehicle train, e.g. to release brake, to operate a warning signal at selected places along the route, e.g. intermittent control simultaneous mechanical and electrical control controlling electrically
- B61L3/12—Devices along the route for controlling devices on the vehicle or vehicle train, e.g. to release brake, to operate a warning signal at selected places along the route, e.g. intermittent control simultaneous mechanical and electrical control controlling electrically using magnetic or electrostatic induction; using radio waves
Description
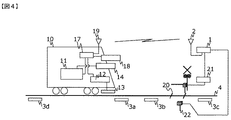
2、19 無線機
3 地上子
4 路線
6 停止点
7 速度照査パターン
8 地上子から停止点までの距離
10 列車
11 車上信号装置
12 送受信器
13 車上子
14 表示器
17 車上無線装置
18 第二の表示器
20 踏切
21 踏切制御装置
22 踏切異常検知装置
Claims (7)
- 外部から入力される列車制御情報に基づいて車上信号装置が列車を制御する列車制御情報伝達システムにおいて、
前記列車が走行する路線上には地上子が設置され、
前記地上子を基点として踏切手前の停止点を示す前記列車制御情報を前記列車に送信する踏切管理装置を備え、
前記列車は、前記列車が前記地上子を通過する前に前記踏切管理装置から受信した前記列車制御情報を記憶し、前記列車が前記地上子を通過することにより前記地上子から信号を受信したときに前記列車制御情報を前記車上信号装置に入力する車上無線装置を備えることを特徴とする列車制御情報伝達システム。 - 請求項1に記載された列車制御情報伝達システムであって、
前記踏切の警報開始点には第一の地上子、前記警報開始点から前記踏切の間には第二の地上子が設置され、
前記列車の前記車上無線装置は、前記列車が前記第一の地上子を通過したとき前記第一の地上子を示す情報を含む地上子通過情報を前記踏切管理装置に送信し、
前記踏切管理装置は、前記踏切を制御する踏切制御装置に対し、前記列車の前記車上無線装置からの前記第一の地上子の前記地上子通過情報に基づいて警報開始信号を送信し、
前記踏切制御装置からの状態情報に基づいて前記第二の地上子を基点として前記踏切の先の前記停止点を示す前記列車制御情報を前記列車に搭載された前記車上無線装置に伝達し、
前記列車の前記車上無線装置は、前記第二の地上子を通過したときに、前記第二の地上子を基点として前記踏切の先の前記停止点を示す前記列車制御情報を前記車上信号装置に入力することを特徴とする列車制御情報伝達システム。 - 請求項1に記載された列車制御情報伝達システムであって、
前記車上無線装置は、前記地上子の通過を検知したときに前記列車制御情報を表示器に表示することを特徴とする列車制御情報伝達システム。 - 請求項2に記載された列車制御情報伝達システムであって、
前記車上無線装置は、前記第二の地上子を基点として前記踏切の先の前記停止点を示す前記列車制御情報を受信したときに、前記第二の地上子を通過したとき前記停止点の位置が更新されることを表示器に表示することを特徴とする列車制御情報伝達システム。 - 請求項1乃至4のいずれか1つに記載された列車制御情報伝達システムであって、
前記踏切管理装置は、前記列車が走行する路線上の踏切上の異常を検知する踏切異常検知装置から踏切異常情報を受信し、前記踏切異常情報に基づいて即時停止を示す前記列車制御情報を前記列車に送信し、
前記列車の前記車上無線装置は、前記踏切管理装置からの前記列車制御情報を受信し、前記即時停止を示す前記列車制御情報を前記列車に搭載された前記車上信号装置に入力することを特徴とする列車制御情報伝達システム。 - 請求項1乃至4のいずれか1つに記載された列車制御情報伝達システムであって、
前記踏切管理装置は、前記列車に前記踏切の先の前記停止点を示す前記列車制御情報を伝達した後、前記踏切上に異常が検知されていないことを示す健全性情報を前記車上無線装置に予め決められた時間間隔で送信し、前記踏切上の異常を検知する踏切異常検知装置から踏切異常情報を受信したとき前記健全性情報の送信を停止し、
前記列車の前記車上無線装置は、前記踏切の先の前記停止点を示す前記列車制御情報を伝達された後、前記踏切管理装置から規定時間を越えて前記健全性情報を受信しなかったとき、即時停止を示す列車制御情報を前記列車に搭載された前記車上信号装置に入力することを特徴とする列車制御情報伝達システム。 - 請求項1乃至6のいずれか1つに記載された列車制御情報伝達システムであって、
前記車上無線装置は、前記列車が前記地上子を通過したとき、当該地上子を基点とした前記列車制御情報を前記踏切管理装置から受信していない場合、当該地上子からの信号を前記車上信号装置に入力することを特徴とする列車制御情報伝達システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018061094A JP6877382B2 (ja) | 2018-03-28 | 2018-03-28 | 列車制御情報伝達システム |
| PCT/JP2019/003927 WO2019187641A1 (ja) | 2018-03-28 | 2019-02-04 | 列車制御情報伝達システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018061094A JP6877382B2 (ja) | 2018-03-28 | 2018-03-28 | 列車制御情報伝達システム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019172003A JP2019172003A (ja) | 2019-10-10 |
| JP2019172003A5 JP2019172003A5 (ja) | 2020-08-13 |
| JP6877382B2 true JP6877382B2 (ja) | 2021-05-26 |
Family
ID=68061133
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018061094A Active JP6877382B2 (ja) | 2018-03-28 | 2018-03-28 | 列車制御情報伝達システム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6877382B2 (ja) |
| WO (1) | WO2019187641A1 (ja) |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0588102U (ja) * | 1991-11-14 | 1993-11-26 | 日本信号株式会社 | 列車速度照査装置 |
| JP2008042981A (ja) * | 2006-08-02 | 2008-02-21 | Hitachi Ltd | 列車制御方法及び装置 |
| JP2010058675A (ja) * | 2008-09-04 | 2010-03-18 | Hitachi Ltd | 定点停止制御装置 |
-
2018
- 2018-03-28 JP JP2018061094A patent/JP6877382B2/ja active Active
-
2019
- 2019-02-04 WO PCT/JP2019/003927 patent/WO2019187641A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019172003A (ja) | 2019-10-10 |
| WO2019187641A1 (ja) | 2019-10-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7832691B2 (en) | System and method for train operation approaching grade crossings | |
| KR101019146B1 (ko) | 열차 자동 제어 시스템의 차상 신호 장치 및 그 동작 방법 | |
| US20020062181A1 (en) | Advanced communication-based vehicle control method | |
| CN109398424B (zh) | 一种非通信车侵入的检测系统 | |
| CN110730742B (zh) | 运行有轨交通系统的方法 | |
| AU2002242170A1 (en) | Advanced communication-based vehicle control method | |
| US20100131129A1 (en) | System and method to provide communication-based train control system capabilities | |
| KR101059190B1 (ko) | 열차의 atc/ato 차상 시스템 | |
| US20160355199A1 (en) | "Train Navigation System and Method" | |
| JP2003261028A (ja) | 無線応用閉塞制御システム及び方法 | |
| AU2018201890B2 (en) | System and method for controlling a level crossing | |
| KR101049176B1 (ko) | 열차 정위치 정차 장치 | |
| KR101653771B1 (ko) | 열차 관제 시스템 | |
| JP6951127B2 (ja) | 自動列車防護システム | |
| US9475511B2 (en) | Parallel tracks design description | |
| JP6877382B2 (ja) | 列車制御情報伝達システム | |
| JP5467749B2 (ja) | 移動閉塞方式atc論理装置を用いた常用系信号とバックアップ系信号を有するバックアップ機能を備えた信号システム | |
| JP6789840B2 (ja) | 列車制御情報伝達システム | |
| CN216467864U (zh) | 一种铁路监控系统 | |
| JP2011195120A (ja) | 無線式踏切警報システム | |
| JP6736759B2 (ja) | 信号保安システム、地上管理装置、車上無線装置、及び、列車制御方法 | |
| KR100840112B1 (ko) | 전동차 역사의 피에스디 제어장치 | |
| KR102316767B1 (ko) | 무 지상자 방식의 자동열차정지시스템 | |
| KR101215730B1 (ko) | 기관차 무인운전 자동화 시스템 | |
| KR20160000590A (ko) | 철도 차량 추돌 방지 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200626 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200626 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210406 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210427 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6877382 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |