JP6874804B2 - 画像復号装置、画像復号方法、及び画像復号プログラム - Google Patents
画像復号装置、画像復号方法、及び画像復号プログラム Download PDFInfo
- Publication number
- JP6874804B2 JP6874804B2 JP2019166981A JP2019166981A JP6874804B2 JP 6874804 B2 JP6874804 B2 JP 6874804B2 JP 2019166981 A JP2019166981 A JP 2019166981A JP 2019166981 A JP2019166981 A JP 2019166981A JP 6874804 B2 JP6874804 B2 JP 6874804B2
- Authority
- JP
- Japan
- Prior art keywords
- prediction mode
- intra
- intra prediction
- target block
- candidate list
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/157—Assigned coding mode, i.e. the coding mode being predefined or preselected to be further used for selection of another element or parameter
- H04N19/159—Prediction type, e.g. intra-frame, inter-frame or bidirectional frame prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/11—Selection of coding mode or of prediction mode among a plurality of spatial predictive coding modes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/105—Selection of the reference unit for prediction within a chosen coding or prediction mode, e.g. adaptive choice of position and number of pixels used for prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/107—Selection of coding mode or of prediction mode between spatial and temporal predictive coding, e.g. picture refresh
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/182—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being a pixel
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/189—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the adaptation method, adaptation tool or adaptation type used for the adaptive coding
- H04N19/196—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the adaptation method, adaptation tool or adaptation type used for the adaptive coding being specially adapted for the computation of encoding parameters, e.g. by averaging previously computed encoding parameters
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/44—Decoders specially adapted therefor, e.g. video decoders which are asymmetric with respect to the encoder
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
- H04N19/517—Processing of motion vectors by encoding
- H04N19/52—Processing of motion vectors by encoding by predictive encoding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/593—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving spatial prediction techniques
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/70—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals characterised by syntax aspects related to video coding, e.g. related to compression standards
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Computing Systems (AREA)
- Theoretical Computer Science (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
Description
図1は、HEVCのイントラ予測モードを説明する図である。図1のようにHEVCではイントラ予測モードとして予測モード0から予測モード34までの35モードが定義されている。予測モード0はINTRA_PLANARであり、予測対象ブロックの隣接画素をフィルタリングして生成した4つの参照画素を内挿予測して予測値を算出する。予測モード1はINTRA_DCであり、予測対象ブロックの予測ブロックの幅の2倍の水平方向の隣接画素と、予測ブロックの高さの2倍の垂直方向の隣接画素とを平均して予測値を算出する。予測モード2から予測モード34は、それぞれの角度に応じて予測対象ブロックの隣接画素をフィルタリングして生成した参照画素から予測値を算出する。ここで、予測対象ブロックの隣接画素のフィルタリングについては、予測対象ブロックのサイズが大きい場合に作用しやすく、予測対象ブロックのサイズが小さい場合に作用しにくくしている。なお、フィルタリングには1:2:1の3タップフィルタが利用される。
以下、図面とともに本発明の実施の形態に係る画像符号化装置、画像符号化方法、及び画像符号化プログラム、並びに画像復号装置、画像復号方法、及び画像復号プログラムの詳細について説明する。
図4は、画像符号化装置100に入力される画像の一部の領域が、ブロックサイズ決定部110で決定されたブロックサイズに基づいて、ブロックに分割されている例を示す。ブロックサイズは4×4、8×4、4×8、8×8、16×8、8×16、32×32、・・・、128×64、64×128、128×128が存在し、入力される画像は各ブロックが重複しないように上記のブロックサイズを用いて分割される。
図5は、実施の形態1のイントラ予測選択部120の構成を示す図である。イントラ予測選択部120はモード数判定部121、予測モード候補生成部122、予測モード選択部123、予測値算出部124、及び予測値重みづけ部125を含む。
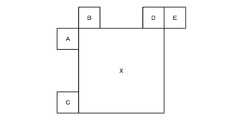
図8は、予測対象ブロックの隣接ブロックを説明する図である。図8において、ブロックXは予測対象ブロックであり、ブロックAからブロックEが隣接ブロックである。ここでは、隣接ブロックをブロックAからブロックEとしたが、ブロックAからブロックDでもよく、更に予測対象ブロックの左上(ブロックAの上)のブロックや左下(ブロックCの下)のブロックなどを追加してもよい。
図13は、実施の形態1のイントラ予測モードに関するシンタックスを説明する図である。図13は予測ブロックのシンタックスであり、pbWidthは予測ブロックの幅、pbHeightは予測ブロックの高さを示す。pbWThreadは所定の閾幅、pbHThreadは所定の閾高を示す。イントラ予測モードの符号化やイントラ予測モードの復号は図13のシンタックスに基づいて行われる。
以下、実施の形態1の変形例1について説明する。角度イントラ予測モード(予測モード2から予測モード34)の予測値の算出において、それぞれの角度に応じて予測対象ブロックの隣接画素から予測値を算出するのではなく、予測対象ブロックの隣接画素をフィルタリングして生成した参照画素から予測値を算出してもよい。
以下、実施の形態1の変形例2について説明する。実施の形態1では予測モード候補リスト1を予測モード候補リスト0とは異なる図11のように生成し、予測モード候補リスト1から選択予測モード1を選択したが、予測モード候補リスト0から選択予測モード1を選択してもよい。このようにすることで、予測モード候補リスト1を生成する処理を削減することができる。
以下、実施の形態1の変形例3について説明する。実施の形態1では選択予測モード1を予測モード0から予測モード34の中から1つ選択した。変形例3では、選択予測モード1を予測モード候補リスト1から選択してもよい。このとき、図13の2nd_prev_intra_luma_pred_flagと2nd_rem_intra_luma_pred_modeは不要となり、2nd_mpm_idxだけで済む。このようにすることで、選択予測モード1の符号化効率を向上させることができる。
以下、実施の形態1の変形例4について説明する。実施の形態1では予測モード候補リスト1を選択予測モード0とは無関係に図11のように生成した。変形例4では予測モード候補リスト1を選択予測モード0に基づいて生成する。
予測モード候補リスト1[0]=(選択予測モード0−1)%35 ・・・(式1)
予測モード候補リスト1[1]=(選択予測モード0+1)%35 ・・・(式2)
「%」は剰余演算子であり、「35」はイントラ予測モード数である。すなわち、(選択予測モード0−1)を35で割った余りが、予測モード候補リスト1[0]に追加される。同様に、(選択予測モード0+1)を35で割った余りが、予測モード候補リスト1[1]に追加される。余りは0〜34の範囲に収まる。
なお、選択予測モード0は非角度イントラ予測モードをとらないため、選択予測モード0が予測モード0または予測モード1をとることはない。そのため、選択予測モード0が予測モード2である場合、予測モード候補リスト1[0]は予測モード1となるが、予測モード1は非角度イントラ予測モードであるため無効とする。同様に、選択予測モード0が予測モード34である場合、予測モード候補リスト1[1]は予測モード0となるが、予測モード0は非角度イントラ予測モードであるため無効とする。
図14は、変形例4のイントラ予測モードに関するシンタックスを説明する図である。2nd_intra_luma_pred_0_flagが1であれば、選択予測モード1として予測モード候補リスト1[0]を選択し、2nd_intra_luma_pred_0_flagが0であれば、選択予測モード1として予測モード候補リスト1[1]を選択する。このようにすることで、選択予測モード1の符号化効率を向上させることができる。選択予測モード0が予測モード2または予測モード34である場合、イントラ予測モードは一意に0に決定される。そのため、2nd_intra_luma_pred_0_flagを符号化または復号する必要がない。これにより、符号化効率と処理効率をさらに向上させることができる。
以下、実施の形態1の変形例5について説明する。実施の形態1の予測値重みづけ部125は、予測モード数が2であれば、選択予測モード0の予測値と選択予測モード1の予測値を単純平均して予測値とした。変形例5では、選択予測モード0の予測値と選択予測モード1の予測値を距離に応じて加重平均して予測値とする。
PP=(N0*d1+N1*d0)/(d0+d1) ・・・(式3)
以下、実施の形態1の変形例6について説明する。実施の形態1では、予測モード数を1または2のいずれにするかは、予測対象ブロックの幅が所定の閾幅以上で且つ前記予測対象ブロックの高さが所定の閾高以上であるか否かで決定した。これを例えば、予測モード数が1であるか2であるかを示す予測モード数フラグを符号化(復号)して指定することもできる。この場合、フラグにより精細に制御できるため、予測効率が向上する。
以下、実施の形態2について説明する。実施の形態1とはイントラ予測選択部の構成と動作が異なる。
以下、実施の形態2の変形例1について説明する。実施の形態2では、予測モード候補リスト0は水平方向のイントラ予測モードとし、予測モード候補リスト1は垂直方向のイントラ予測モードとし、予測モード候補リストとイントラ予測モードに関するシンタックスの分類を一致させたが、これに限定されない。
予測モード候補リストが水平方向のイントラ予測モードと垂直方向のイントラ予測モードのイントラ予測モードを含む場合について説明する。ただし、非角度イントラ予測モードは予測モード候補リストには含まれない。図19は、実施の形態2の変形例2のイントラ予測モードに関するシンタックスを説明する図である。イントラ予測モードに関するイントラ予測モードの符号化やイントラ予測モードの復号は図19のシンタックスに基づいて行われる。
続いて、予測モード候補リストが非角度イントラ予測モードのINTRA_DC、水平方向のイントラ予測モード、及び垂直方向のイントラ予測モードのイントラ予測モードを含む場合について説明する。ただし、INTRA_PLANARは予測モード候補リストには含まれない。実施の形態2では、非角度イントラ予測モードであるか否かを示すフラグ(intra_luma_non_angular_pred_flag)を符号化(復号)した。実施の形態2の変形例3では、非角度イントラ予測モードであるか否かを示すフラグをイントラ予測モードの中で最も選択確率の高いイントラ予測モードであるINTRA_PLANARであるか否かを示すフラグに限定して符号化(復号)する。選択予測モードがINTRA_PLANARである場合、non_angular_idxは符号化(復号)する必要はなく、INTRA_PLANARの符号化効率を改善できる。INTRA_PLANARであるか否かを示すフラグがINTRA_PLANARであることを示す場合は、INTRA_PLANARが選択予測モードとして選択される。図19では、INTRA_PLANARであるか否かを示すフラグがINTRA_PLANARでないことを示す場合は、mpm_idxが符号化(復号)されて、INTRA_PLANAR以外のイントラ予測モードが選択予測モードとして選択される。図20では、INTRA_PLANARであるか否かを示すフラグがINTRA_PLANARでないことを示す場合は、prev_intra_luma_pred_flag、mpm_idx等のインデックスが符号化(復号)されて、INTRA_PLANAR以外のイントラ予測モードが選択予測モードとして選択される。
予測対象ブロックに隣接するブロックのイントラ予測モードから第1のイントラ予測モード候補リストと第2のイントラ予測モード候補リストを生成する予測モード候補生成部(122)と、
前記第1のイントラ予測モード候補リストと前記第2のイントラ予測モード候補リストからそれぞれ第1のイントラ予測モードと第2のイントラ予測モードを選択する予測モード選択部(123)と、
前記第1のイントラ予測モードに基づいて前記予測対象ブロックに隣接する符号化済みの画素から第1の予測値を算出し、前記第2のイントラ予測モードに基づいて前記予測対象ブロックに隣接する符号化済みの画素から第2の予測値を算出する予測値算出部(124)と、
前記第1の予測値と第2の予測値をもとに第3の予測値を算出する予測値重みづけ部(125)と、
を有することを特徴とする画像符号化装置(100)。
[項目2]
前記予測値重みづけ部(125)は、前記第1の予測値と第2の予測値を単純平均または加重平均して前記第3の予測値を算出することを特徴とする項目1に記載の画像符号化装置(100)。
[項目3]
前記予測モード候補生成部(122)は、イントラ予測モードの数が2であれば前記第2のイントラ予測モード候補リストを生成し、イントラ予測モードの数が1であれば前記第2のイントラ予測モード候補リストを生成せず、
前記予測モード選択部(123)は、イントラ予測モードの数が2であれば前記第2のイントラ予測モードを選択し、イントラ予測モードの数が1であれば前記第2のイントラ予測モードを選択せず、
前記予測値算出部(124)は、イントラ予測モードの数が2であれば第2の予測値を算出し、イントラ予測モードの数が1であれば第2の予測値を算出せず、
前記予測値重みづけ部(125)は、イントラ予測モードの数が2であれば前記第1の予測値と第2の予測値をもとに第3の予測値を算出し、イントラ予測モードの数が1であれば、前記第1の予測値をそのまま予測値とすることを特徴とする項目1または2に記載の画像符号化装置(100)。
[項目4]
前記予測対象ブロックの幅が所定の閾幅以上で且つ前記予測対象ブロックの高さが所定の閾高以上であれば、イントラ予測モードの数を2とし、前記予測対象ブロックの幅が所定の閾幅以上で且つ前記予測対象ブロックの高さが所定の閾高以上でなければ、イントラ予測モードの数を1とするモード数判定部(121)をさらに有することを特徴とする項目3に記載の画像符号化装置(100)。
[項目5]
前記モード数判定部(121)は、前記第1のイントラ予測モードが非角度イントラ予測モードのとき、イントラ予測モードの数を1とすることを特徴とする項目4に記載の画像符号化装置(100)。
[項目6]
イントラ予測モードの数が2のとき、前記第2のイントラ予測モードの情報を符号列として符号化する符号化部(140)をさらに有することを特徴とする項目3から5のいずれか1項に記載の画像符号化装置(100)。
[項目7]
前記予測対象ブロックに隣接する符号化済みの画素を用いてイントラ予測を行う複数のイントラ予測モードを、非角度イントラ予測モードと角度イントラ予測モードに分類して、前記非角度イントラ予測モードのシンタックス要素と前記角度イントラ予測モードのシンタックス要素に分割して符号列を生成する符号化部(140)をさらに有することを特徴とする項目1から5のいずれか1項に記載の画像符号化装置(100)。
[項目8]
前記予測対象ブロックに隣接するブロックの前記第1のイントラ予測モードと前記第2のイントラ予測モードを、前記予測対象ブロックの前記第1のイントラ予測モードと前記第2のイントラ予測モードとして取得し、1つのシンタックス要素に符号化する符号化部(140)をさらに有することを特徴とする項目1から4のいずれか1項に記載の画像符号化装置(100)。
[項目9]
予測対象ブロックに隣接するブロックのイントラ予測モードから第1のイントラ予測モード候補リストと第2のイントラ予測モード候補リストを生成する予測モード候補ステップと、
前記第1のイントラ予測モード候補リストと前記第2のイントラ予測モード候補リストからそれぞれ第1のイントラ予測モードと第2のイントラ予測モードを選択する予測モード選択ステップと、
前記第1のイントラ予測モードに基づいて前記予測対象ブロックに隣接する符号化済みの画素から第1の予測値を算出し、前記第2のイントラ予測モードに基づいて前記予測対象ブロックに隣接する符号化済みの画素から第2の予測値を算出する予測値算出ステップと、
前記第1の予測値と第2の予測値をもとに第3の予測値を算出する予測値重みづけステップと、
を有することを特徴とする画像符号化方法。
[項目10]
予測対象ブロックに隣接するブロックのイントラ予測モードから第1のイントラ予測モード候補リストと第2のイントラ予測モード候補リストを生成する予測モード候補ステップと、
前記第1のイントラ予測モード候補リストと前記第2のイントラ予測モード候補リストからそれぞれ第1のイントラ予測モードと第2のイントラ予測モードを選択する予測モード選択ステップと、
前記第1のイントラ予測モードに基づいて前記予測対象ブロックに隣接する符号化済みの画素から第1の予測値を算出し、前記第2のイントラ予測モードに基づいて前記予測対象ブロックに隣接する符号化済みの画素から第2の予測値を算出する予測値算出ステップと、
前記第1の予測値と第2の予測値をもとに第3の予測値を算出する予測値重みづけステップと、
をコンピュータに実行させることを特徴とする画像符号化プログラム。
[項目11]
予測対象ブロックに隣接する符号化済みの画素を用いてイントラ予測を行うイントラ予測モードが複数定義された画像符号化装置(100)であって、
前記複数のイントラ予測モードを非角度イントラ予測モードと角度イントラ予測モードに分類して、前記非角度イントラ予測モードのシンタックス要素と前記角度イントラ予測モードのシンタックス要素に分割して符号列を生成する符号化部(140)を有することを特徴とする画像符号化装置(100)。
[項目12]
予測対象ブロックに隣接する符号化済みの画素を用いてイントラ予測を行うイントラ予測モードが複数定義された画像符号化方法であって、
前記複数のイントラ予測モードを非角度イントラ予測モードと角度イントラ予測モードに分類して、前記非角度イントラ予測モードのシンタックス要素と前記角度イントラ予測モードのシンタックス要素に分割して符号列を生成する符号化ステップを有することを特徴とする画像符号化方法。
[項目13]
予測対象ブロックに隣接する符号化済みの画素を用いてイントラ予測を行うイントラ予測モードが複数定義された画像符号化プログラムであって、
前記複数のイントラ予測モードを非角度イントラ予測モードと角度イントラ予測モードに分類して、前記非角度イントラ予測モードのシンタックス要素と前記角度イントラ予測モードのシンタックス要素に分割して符号列を生成する符号化ステップをコンピュータに実行させることを特徴とする画像符号化プログラム。
[項目14]
予測対象ブロックに隣接する符号化済みの画素を用いてイントラ予測を行うイントラ予測モードが複数定義された画像符号化装置(100)であって、
予測対象ブロックに隣接するブロックの第1のイントラ予測モードと第2のイントラ予測モードを前記予測対象ブロックの第1のイントラ予測モードと第2のイントラ予測モードとして取得し、1つのシンタックス要素に符号化する符号化部(140)を有することを特徴とする画像符号化装置(100)。
[項目15]
予測対象ブロックに隣接する符号化済みの画素を用いてイントラ予測を行うイントラ予測モードが複数定義された画像符号化方法であって、
予測対象ブロックに隣接するブロックの第1のイントラ予測モードと第2のイントラ予測モードを前記予測対象ブロックの第1のイントラ予測モードと第2のイントラ予測モードとして取得し、1つのシンタックス要素に符号化する符号化ステップを有することを特徴とする画像符号化方法。
[項目16]
予測対象ブロックに隣接する符号化済みの画素を用いてイントラ予測を行うイントラ予測モードが複数定義された画像符号化プログラムであって、
予測対象ブロックに隣接するブロックの第1のイントラ予測モードと第2のイントラ予測モードを前記予測対象ブロックの第1のイントラ予測モードと第2のイントラ予測モードとして取得し、1つのシンタックス要素に符号化する符号化ステップをコンピュータに実行させることを特徴とする画像符号化プログラム。
[項目17]
予測対象ブロックに隣接するブロックのイントラ予測モードから第1のイントラ予測モード候補リストと第2のイントラ予測モード候補リストを生成する予測モード候補生成部(122)と、
前記第1のイントラ予測モードの符号列から第1のイントラ予測モードを選択し、前記第2のイントラ予測モードの符号列から第2のイントラ予測モードを選択する予測モード選択部(123)と、
前記第1のイントラ予測モードに基づいて前記予測対象ブロックに隣接する復号済みの画素から第1の予測値を算出し、前記第2のイントラ予測モードに基づいて前記予測対象ブロックに隣接する復号済みの画素から第2の予測値を算出する予測値算出部(124)と、
前記第1の予測値と第2の予測値をもとに第3の予測値を算出する予測値重みづけ部(125)と、
を有することを特徴とする画像復号装置(200)。
[項目18]
前記予測値重みづけ部(125)は、前記第1の予測値と第2の予測値を単純平均または加重平均して前記第3の予測値を算出することを特徴とする項目17に記載の画像復号装置(200)。
[項目19]
前記予測モード候補生成部(122)は、イントラ予測モードの数が2であれば前記第2のイントラ予測モード候補リストを生成し、イントラ予測モードの数が1であれば前記第2のイントラ予測モード候補リストを生成せず、
前記予測モード選択部(123)は、イントラ予測モードの数が2であれば前記第2のイントラ予測モードを選択し、イントラ予測モードの数が1であれば前記第2のイントラ予測モードを選択せず、
前記予測値算出部(124)は、イントラ予測モードの数が2であれば第2の予測値を算出し、イントラ予測モードの数が1であれば第2の予測値を算出せず、
前記予測値重みづけ部(125)は、イントラ予測モードの数が2であれば前記第1の予測値と第2の予測値をもとに第3の予測値を算出し、イントラ予測モードの数が1であれば、前記第1の予測値をそのまま予測値とすることを特徴とする項目17または18に記載の画像復号装置(200)。
[項目20]
前記予測対象ブロックの幅が所定の閾幅以上で且つ前記予測対象ブロックの高さが所定の閾高以上であれば、イントラ予測モードの数を2とし、前記予測対象ブロックの幅が所定の閾幅以上で且つ前記予測対象ブロックの高さが所定の閾高以上でなければ、イントラ予測モードの数を1とするモード数判定部(121)をさらに有することを特徴とする項目19に記載の画像復号装置(200)。
[項目21]
前記モード数判定部(121)は、前記第1のイントラ予測モードが非角度イントラ予測モードのとき、イントラ予測モードの数を1とすることを特徴とする項目20に記載の画像復号装置(200)。
[項目22]
イントラ予測モードの数が2のとき、前記第2のイントラ予測モードの符号列を復号する復号部(210)をさらに有することを特徴とする項目17から21のいずれか1項に記載の画像復号装置(200)。
[項目23]
前記予測対象ブロックに隣接する復号済みの画素を用いてイントラ予測を行う複数のイントラ予測モードを、非角度イントラ予測モードと角度イントラ予測モードに分類して、前記非角度イントラ予測モードのシンタックス要素と前記角度イントラ予測モードのシンタックス要素に分割して生成された符号列を復号する復号部(210)をさらに有することを特徴とする項目17から21のいずれか1項に記載の画像復号装置(200)。
[項目24]
前記予測対象ブロックに隣接するブロックの前記第1のイントラ予測モードと前記第2のイントラ予測モードを、前記予測対象ブロックの前記第1のイントラ予測モードと前記第2のイントラ予測モードとして取得し、1つのシンタックス要素に符号化された符号列を復号する復号部(210)をさらに有することを特徴とする項目17から21のいずれか1項に記載の画像復号装置(200)。
[項目25]
予測対象ブロックに隣接するブロックのイントラ予測モードから第1のイントラ予測モード候補リストと第2のイントラ予測モード候補リストを生成する予測モード候補生成ステップと、
前記第1のイントラ予測モードの符号列から第1のイントラ予測モードを選択し、前記第2のイントラ予測モードの符号列から第2のイントラ予測モードを選択する予測モード選択ステップと、
前記第1のイントラ予測モードに基づいて前記予測対象ブロックに隣接する復号済みの画素から第1の予測値を算出し、前記第2のイントラ予測モードに基づいて前記予測対象ブロックに隣接する復号済みの画素から第2の予測値を算出する予測値算出ステップと、
前記第1の予測値と第2の予測値をもとに第3の予測値を算出する予測値重みづけステップと、
を有することを特徴とする画像復号方法。
[項目26]
予測対象ブロックに隣接するブロックのイントラ予測モードから第1のイントラ予測モード候補リストと第2のイントラ予測モード候補リストを生成する予測モード候補生成ステップと、
前記第1のイントラ予測モードの符号列から第1のイントラ予測モードを選択し、前記第2のイントラ予測モードの符号列から第2のイントラ予測モードを選択する予測モード選択ステップと、
前記第1のイントラ予測モードに基づいて前記予測対象ブロックに隣接する復号済みの画素から第1の予測値を算出し、前記第2のイントラ予測モードに基づいて前記予測対象ブロックに隣接する復号済みの画素から第2の予測値を算出する予測値算出ステップと、
前記第1の予測値と第2の予測値をもとに第3の予測値を算出する予測値重みづけステップと、
をコンピュータに実行させることを特徴とする画像復号プログラム。
[項目27]
予測対象ブロックに隣接する復号済みの画素を用いてイントラ予測を行うイントラ予測モードが複数定義された画像復号装置(200)であって、
前記複数のイントラ予測モードを非角度イントラ予測モードと角度イントラ予測モードに分類して、前記非角度イントラ予測モードのシンタックス要素と前記角度イントラ予測モードのシンタックス要素に分割して生成された符号列を復号する復号部(210)を有することを特徴とする画像復号装置(200)。
[項目28]
予測対象ブロックに隣接する復号済みの画素を用いてイントラ予測を行うイントラ予測モードが複数定義された画像復号方法であって、
前記複数のイントラ予測モードを非角度イントラ予測モードと角度イントラ予測モードに分類して、前記非角度イントラ予測モードのシンタックス要素と前記角度イントラ予測モードのシンタックス要素に分割して生成された符号列を復号する復号ステップを有することを特徴とする画像復号方法。
[項目29]
予測対象ブロックに隣接する復号済みの画素を用いてイントラ予測を行うイントラ予測モードが複数定義された画像復号プログラムであって、
前記複数のイントラ予測モードを非角度イントラ予測モードと角度イントラ予測モードに分類して、前記非角度イントラ予測モードのシンタックス要素と前記角度イントラ予測モードのシンタックス要素に分割して生成された符号列を復号する復号化ステップをコンピュータに実行させることを特徴とする画像復号プログラム。
[項目30]
予測対象ブロックに隣接する復号済みの画素を用いてイントラ予測を行うイントラ予測モードが複数定義された画像復号装置(200)であって、
予測対象ブロックに隣接するブロックの第1のイントラ予測モードと第2のイントラ予測モードを前記予測対象ブロックの第1のイントラ予測モードと第2のイントラ予測モードとして取得し、1つのシンタックス要素に符号化された符号列を復号する復号部(210)を有することを特徴とする画像復号装置(200)。
[項目31]
予測対象ブロックに隣接する復号済みの画素を用いてイントラ予測を行うイントラ予測モードが複数定義された画像復号方法であって、
予測対象ブロックに隣接するブロックの第1のイントラ予測モードと第2のイントラ予測モードを前記予測対象ブロックの第1のイントラ予測モードと第2のイントラ予測モードとして取得し、1つのシンタックス要素に符号化された符号列を復号する復号ステップを有することを特徴とする画像復号方法。
[項目32]
予測対象ブロックに隣接する復号済みの画素を用いてイントラ予測を行うイントラ予測モードが複数定義された画像復号プログラムであって、
予測対象ブロックに隣接するブロックの第1のイントラ予測モードと第2のイントラ予測モードを前記予測対象ブロックの第1のイントラ予測モードと第2のイントラ予測モードとして取得し、1つのシンタックス要素に符号化された符号列を復号する復号ステップをコンピュータに実行させることを特徴とする画像復号プログラム。
Claims (6)
- 予測対象ブロックに隣接するブロックのイントラ予測モードに基づいて第1のイントラ予測モード候補リストと第2のイントラ予測モード候補リストを生成する予測モード候補生成部と、
前記予測対象ブロックのイントラ予測モードが前記第1のイントラ予測モード候補リストに含まれるか否かを示す第1のフラグを復号し、前記第1のフラグが真であれば、第1の候補特定インデックスを復号し、前記第1のフラグが偽であれば、前記予測対象ブロックのイントラ予測モードが前記第2のイントラ予測モード候補リストに含まれるか否かを示す第2のフラグを復号し、前記第2のフラグが真であれば、第2の候補特定インデックスを復号し、前記第2のフラグが偽であれば、前記予測対象ブロックのイントラ予測モードを示す情報を復号する復号部と、
前記第1のフラグが真であれば、前記第1の候補特定インデックスに基づいて前記第1のイントラ予測モード候補リストから前記予測対象ブロックのイントラ予測モードを選択し、前記第2のフラグが真であれば、前記第2の候補特定インデックスに基づいて前記第2のイントラ予測モード候補リストから前記予測対象ブロックのイントラ予測モードを選択し、前記第2のフラグが偽であれば、前記イントラ予測モードを示す情報に基づいて前記予測対象ブロックのイントラ予測モードを選択する予測モード選択部と、
前記予測対象ブロックのイントラ予測モードに基づいて前記予測対象ブロックに隣接する復号済みの画素から前記予測対象ブロックの予測値を算出する予測値算出部とを有し、
前記予測モード候補生成部は、前記第1のイントラ予測モード候補リストに含まれる候補と隣接する角度のイントラ予測モードを前記第2のイントラ予測モード候補リストに含めることを特徴とする画像復号装置。 - 予測対象ブロックに隣接するブロックのイントラ予測モードに基づいて第1のイントラ予測モード候補リストと第2のイントラ予測モード候補リストを生成する予測モード候補生成ステップと、
前記予測対象ブロックのイントラ予測モードが前記第1のイントラ予測モード候補リストに含まれるか否かを示す第1のフラグを復号し、前記第1のフラグが真であれば、第1の候補特定インデックスを復号し、前記第1のフラグが偽であれば、前記予測対象ブロックのイントラ予測モードが前記第2のイントラ予測モード候補リストに含まれるか否かを示す第2のフラグを復号し、前記第2のフラグが真であれば、第2の候補特定インデックスを復号し、前記第2のフラグが偽であれば、前記予測対象ブロックのイントラ予測モードを示す情報を復号する復号ステップと、
前記第1のフラグが真であれば、前記第1の候補特定インデックスに基づいて前記第1のイントラ予測モード候補リストから前記予測対象ブロックのイントラ予測モードを選択し、前記第2のフラグが真であれば、前記第2の候補特定インデックスに基づいて前記第2のイントラ予測モード候補リストから前記予測対象ブロックのイントラ予測モードを選択し、前記第2のフラグが偽であれば、前記イントラ予測モードを示す情報に基づいて前記予測対象ブロックのイントラ予測モードを選択する予測モード選択ステップと、
前記予測対象ブロックのイントラ予測モードに基づいて前記予測対象ブロックに隣接する復号済みの画素から前記予測対象ブロックの予測値を算出する予測値算出ステップとを有し、
前記予測モード候補生成ステップは、前記第1のイントラ予測モード候補リストに含まれる候補と隣接する角度のイントラ予測モードを前記第2のイントラ予測モード候補リストに含めることを特徴とする画像復号方法。 - 予測対象ブロックに隣接するブロックのイントラ予測モードに基づいて第1のイントラ予測モード候補リストと第2のイントラ予測モード候補リストを生成する予測モード候補生成ステップと、
前記予測対象ブロックのイントラ予測モードが前記第1のイントラ予測モード候補リストに含まれるか否かを示す第1のフラグを復号し、前記第1のフラグが真であれば、第1の候補特定インデックスを復号し、前記第1のフラグが偽であれば、前記予測対象ブロックのイントラ予測モードが前記第2のイントラ予測モード候補リストに含まれるか否かを示す第2のフラグを復号し、前記第2のフラグが真であれば、第2の候補特定インデックスを復号し、前記第2のフラグが偽であれば、前記予測対象ブロックのイントラ予測モードを示す情報を復号する復号ステップと、
前記第1のフラグが真であれば、前記第1の候補特定インデックスに基づいて前記第1のイントラ予測モード候補リストから前記予測対象ブロックのイントラ予測モードを選択し、前記第2のフラグが真であれば、前記第2の候補特定インデックスに基づいて前記第2のイントラ予測モード候補リストから前記予測対象ブロックのイントラ予測モードを選択し、前記第2のフラグが偽であれば、前記イントラ予測モードを示す情報に基づいて前記予測対象ブロックのイントラ予測モードを選択する予測モード選択ステップと、
前記予測対象ブロックのイントラ予測モードに基づいて前記予測対象ブロックに隣接する復号済みの画素から前記予測対象ブロックの予測値を算出する予測値算出ステップとをコンピュータに実行させ、
前記予測モード候補生成ステップは、前記第1のイントラ予測モード候補リストに含まれる候補と隣接する角度のイントラ予測モードを前記第2のイントラ予測モード候補リストに含めることを特徴とする画像復号プログラム。 - 予測対象ブロックに隣接するブロックのイントラ予測モードに基づいて第1のイントラ予測モード候補リストと第2のイントラ予測モード候補リストを生成する予測モード候補生成部と、
前記予測対象ブロックのイントラ予測モードが前記第1のイントラ予測モード候補リストに含まれる場合、第1のフラグを真として符号化するとともに第1の候補特定インデックスを符号化し、前記予測対象ブロックのイントラ予測モードが前記第1のイントラ予測モード候補リストに含まれない場合、第1のフラグを偽として符号化するとともに前記予測対象ブロックのイントラ予測モードが前記第2のイントラ予測モード候補リストに含まれるか否かを示す第2のフラグを符号化し、前記第2のフラグが真であれば第2の候補特定インデックスを符号化し、前記第2のフラグが偽であれば、前記予測対象ブロックのイントラ予測モードを示す情報を符号化する符号化部と、
前記第1のフラグが真であれば、前記第1の候補特定インデックスに基づいて前記第1のイントラ予測モード候補リストから前記予測対象ブロックのイントラ予測モードを選択し、前記第2のフラグが真であれば、前記第2の候補特定インデックスに基づいて前記第2のイントラ予測モード候補リストから前記予測対象ブロックのイントラ予測モードを選択し、前記第2のフラグが偽であれば、前記イントラ予測モードを示す情報に基づいて前記予測対象ブロックのイントラ予測モードを選択する予測モード選択部と、
前記予測対象ブロックのイントラ予測モードに基づいて前記予測対象ブロックに隣接する符号化済みの画素から前記予測対象ブロックの予測値を算出する予測値算出部とを有し、
前記予測モード候補生成部は、前記第1のイントラ予測モード候補リストに含まれる候補と隣接する角度のイントラ予測モードを前記第2のイントラ予測モード候補リストに含めることを特徴とする画像符号化装置。 - 予測対象ブロックに隣接するブロックのイントラ予測モードに基づいて第1のイントラ予測モード候補リストと第2のイントラ予測モード候補リストを生成する予測モード候補生成ステップと、
前記予測対象ブロックのイントラ予測モードが前記第1のイントラ予測モード候補リストに含まれる場合、第1のフラグを真として符号化するとともに第1の候補特定インデックスを符号化し、前記予測対象ブロックのイントラ予測モードが前記第1のイントラ予測モード候補リストに含まれない場合、第1のフラグを偽として符号化するとともに前記予測対象ブロックのイントラ予測モードが前記第2のイントラ予測モード候補リストに含まれるか否かを示す第2のフラグを符号化し、前記第2のフラグが真であれば第2の候補特定インデックスを符号化し、前記第2のフラグが偽であれば、前記予測対象ブロックのイントラ予測モードを示す情報を符号化する符号化ステップと、
前記第1のフラグが真であれば、前記第1の候補特定インデックスに基づいて前記第1のイントラ予測モード候補リストから前記予測対象ブロックのイントラ予測モードを選択し、前記第2のフラグが真であれば、前記第2の候補特定インデックスに基づいて前記第2のイントラ予測モード候補リストから前記予測対象ブロックのイントラ予測モードを選択し、前記第2のフラグが偽であれば、前記イントラ予測モードを示す情報に基づいて前記予測対象ブロックのイントラ予測モードを選択する予測モード選択ステップと、
前記予測対象ブロックのイントラ予測モードに基づいて前記予測対象ブロックに隣接する符号化済みの画素から前記予測対象ブロックの予測値を算出する予測値算出ステップとを有し、
前記予測モード候補生成ステップは、前記第1のイントラ予測モード候補リストに含まれる候補と隣接する角度のイントラ予測モードを前記第2のイントラ予測モード候補リストに含めることを特徴とする画像符号化方法。 - 予測対象ブロックに隣接するブロックのイントラ予測モードに基づいて第1のイントラ予測モード候補リストと第2のイントラ予測モード候補リストを生成する予測モード候補生成ステップと、
前記予測対象ブロックのイントラ予測モードが前記第1のイントラ予測モード候補リストに含まれる場合、第1のフラグを真として符号化するとともに第1の候補特定インデックスを符号化し、前記予測対象ブロックのイントラ予測モードが前記第1のイントラ予測モード候補リストに含まれない場合、第1のフラグを偽として符号化するとともに前記予測対象ブロックのイントラ予測モードが前記第2のイントラ予測モード候補リストに含まれるか否かを示す第2のフラグを符号化し、前記第2のフラグが真であれば第2の候補特定インデックスを符号化し、前記第2のフラグが偽であれば、前記予測対象ブロックのイントラ予測モードを示す情報を符号化する符号化ステップと、
前記第1のフラグが真であれば、前記第1の候補特定インデックスに基づいて前記第1のイントラ予測モード候補リストから前記予測対象ブロックのイントラ予測モードを選択し、前記第2のフラグが真であれば、前記第2の候補特定インデックスに基づいて前記第2のイントラ予測モード候補リストから前記予測対象ブロックのイントラ予測モードを選択し、前記第2のフラグが偽であれば、前記イントラ予測モードを示す情報に基づいて前記予測対象ブロックのイントラ予測モードを選択する予測モード選択ステップと、
前記予測対象ブロックのイントラ予測モードに基づいて前記予測対象ブロックに隣接する符号化済みの画素から前記予測対象ブロックの予測値を算出する予測値算出ステップとをコンピュータに実行させ、
前記予測モード候補生成ステップは、前記第1のイントラ予測モード候補リストに含まれる候補と隣接する角度のイントラ予測モードを前記第2のイントラ予測モード候補リストに含めることを特徴とする画像符号化プログラム。
Priority Applications (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| BR112021005523-1A BR112021005523A2 (pt) | 2018-09-28 | 2019-09-13 | dispositivo de decodificação de imagem, método de decodificação de imagem, e programa de decodificação de imagem |
| KR1020217003082A KR102702123B1 (ko) | 2018-09-28 | 2019-09-13 | 화상 복호 장치, 화상 복호 방법, 화상 복호 프로그램, 화상 부호화 장치, 화상 부호화 방법 및, 화상 부호화 프로그램 |
| RU2021107682A RU2768956C1 (ru) | 2018-09-28 | 2019-09-13 | Устройство декодирования изображения, способ декодирования изображения, устройство кодирования изображения и способ кодирования изображения |
| PCT/JP2019/036141 WO2020066702A1 (ja) | 2018-09-28 | 2019-09-13 | 画像復号装置、画像復号方法、及び画像復号プログラム |
| MX2021003467A MX2021003467A (es) | 2018-09-28 | 2019-09-13 | Dispositivo de decodificacion de imagenes, metodo de decodificacion de imagenes y programa de decodificacion de imagenes. |
| US17/207,987 US20210211651A1 (en) | 2018-09-28 | 2021-03-22 | Picture decoding device, picture decoding method, and picture decoding program, and picture coding device, picture coding method, and picture coding program |
| JP2021069712A JP7160135B2 (ja) | 2018-09-28 | 2021-04-16 | 画像符号化装置、画像符号化方法及び画像符号化プログラム、並びに画像復号装置、画像復号方法、及び画像復号プログラム |
| JP2022163084A JP7494886B2 (ja) | 2018-09-28 | 2022-10-11 | 画像符号化装置、画像符号化方法及び画像符号化プログラム、並びに画像復号装置、画像復号方法、及び画像復号プログラム |
| JP2024083990A JP2024109817A (ja) | 2018-09-28 | 2024-05-23 | 画像符号化装置、画像符号化方法及び画像符号化プログラム、並びに画像復号装置、画像復号方法、及び画像復号プログラム |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018183954 | 2018-09-28 | ||
| JP2018183954 | 2018-09-28 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021069712A Division JP7160135B2 (ja) | 2018-09-28 | 2021-04-16 | 画像符号化装置、画像符号化方法及び画像符号化プログラム、並びに画像復号装置、画像復号方法、及び画像復号プログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2020058025A JP2020058025A (ja) | 2020-04-09 |
| JP2020058025A5 JP2020058025A5 (ja) | 2021-03-25 |
| JP6874804B2 true JP6874804B2 (ja) | 2021-05-19 |
Family
ID=70107875
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019166981A Active JP6874804B2 (ja) | 2018-09-28 | 2019-09-13 | 画像復号装置、画像復号方法、及び画像復号プログラム |
| JP2021069712A Active JP7160135B2 (ja) | 2018-09-28 | 2021-04-16 | 画像符号化装置、画像符号化方法及び画像符号化プログラム、並びに画像復号装置、画像復号方法、及び画像復号プログラム |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021069712A Active JP7160135B2 (ja) | 2018-09-28 | 2021-04-16 | 画像符号化装置、画像符号化方法及び画像符号化プログラム、並びに画像復号装置、画像復号方法、及び画像復号プログラム |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20210211651A1 (ja) |
| EP (1) | EP3860122B1 (ja) |
| JP (2) | JP6874804B2 (ja) |
| KR (1) | KR102702123B1 (ja) |
| CN (2) | CN112887719B (ja) |
| BR (1) | BR112021005523A2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| MX2021003467A (es) * | 2018-09-28 | 2021-06-18 | Jvckenwood Corp | Dispositivo de decodificacion de imagenes, metodo de decodificacion de imagenes y programa de decodificacion de imagenes. |
| JP6974377B2 (ja) * | 2019-03-11 | 2021-12-01 | Kddi株式会社 | 画像復号装置、画像復号方法及びプログラム |
| CN111741299B (zh) * | 2020-07-09 | 2022-03-25 | 腾讯科技(深圳)有限公司 | 帧内预测模式的选择方法、装置、设备及存储介质 |
| WO2022260339A1 (ko) * | 2021-06-08 | 2022-12-15 | 현대자동차주식회사 | 비디오 부호화/복호화 방법 및 장치 |
| WO2023122969A1 (zh) * | 2021-12-28 | 2023-07-06 | Oppo广东移动通信有限公司 | 帧内预测方法、设备、系统、及存储介质 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20110249741A1 (en) * | 2010-04-09 | 2011-10-13 | Jie Zhao | Methods and Systems for Intra Prediction |
| US8902978B2 (en) * | 2010-05-30 | 2014-12-02 | Lg Electronics Inc. | Enhanced intra prediction mode signaling |
| PL3125556T3 (pl) | 2010-08-17 | 2019-03-29 | M&K Holdings Inc. | Sposób kodowania trybu intra-predykcji |
| KR101538248B1 (ko) * | 2010-12-17 | 2015-07-20 | 미쓰비시덴키 가부시키가이샤 | 화상 부호화 장치 |
| AU2015202844B2 (en) * | 2011-01-12 | 2016-03-17 | Ntt Docomo, Inc. | Image predict coding method, image predict coding device, image predict coding program, image predict decoding method, image predict decoding device, and image predict decoding program |
| KR101955051B1 (ko) * | 2011-06-13 | 2019-03-06 | 선 페이턴트 트러스트 | 화상 복호 방법, 화상 부호화 방법, 화상 복호 장치, 화상 부호화 장치 및 화상 부호화 복호 장치 |
| JP2013141075A (ja) * | 2011-12-28 | 2013-07-18 | Jvc Kenwood Corp | 画像符号化装置、画像符号化方法及び画像符号化プログラム |
| CN109889830B (zh) * | 2012-01-13 | 2023-08-08 | 夏普株式会社 | 图像解码装置及方法、图像编码装置及方法 |
| US10666936B2 (en) * | 2015-12-17 | 2020-05-26 | Samsung Electronics Co., Ltd. | Video decoding method and video decoding apparatus using merge candidate list |
| EP3453173B1 (en) * | 2016-05-05 | 2021-08-25 | InterDigital Madison Patent Holdings, SAS | Control-point based intra direction representation for intra coding |
| US11722677B2 (en) * | 2016-05-06 | 2023-08-08 | Interdigital Madison Patent Holdings, Sas | Method and system for decoder-side intra mode derivation for block-based video coding |
| US10547854B2 (en) * | 2016-05-13 | 2020-01-28 | Qualcomm Incorporated | Neighbor based signaling of intra prediction modes |
| US10230961B2 (en) * | 2016-06-03 | 2019-03-12 | Mediatek Inc. | Method and apparatus for template-based intra prediction in image and video coding |
| EP3910954A1 (en) * | 2016-08-26 | 2021-11-17 | SHARP Kabushiki Kaisha | Image decoding apparatus, image coding apparatus |
| WO2018066863A1 (ko) * | 2016-10-04 | 2018-04-12 | 한국전자통신연구원 | 영상 부호화/복호화 방법, 장치 및 비트스트림을 저장한 기록 매체 |
| US10506228B2 (en) * | 2016-10-04 | 2019-12-10 | Qualcomm Incorporated | Variable number of intra modes for video coding |
| JP2019216294A (ja) * | 2016-10-14 | 2019-12-19 | シャープ株式会社 | エントロピー復号装置、エントロピー符号化装置、画像復号装置および画像符号化装置 |
| CN116781899A (zh) * | 2016-10-28 | 2023-09-19 | 韩国电子通信研究院 | 视频编码/解码方法和设备以及存储比特流的记录介质 |
-
2019
- 2019-09-13 EP EP19864950.1A patent/EP3860122B1/en active Active
- 2019-09-13 BR BR112021005523-1A patent/BR112021005523A2/pt not_active Application Discontinuation
- 2019-09-13 JP JP2019166981A patent/JP6874804B2/ja active Active
- 2019-09-13 CN CN202110324975.XA patent/CN112887719B/zh active Active
- 2019-09-13 KR KR1020217003082A patent/KR102702123B1/ko active IP Right Grant
- 2019-09-13 CN CN201980050632.XA patent/CN112514378A/zh active Pending
-
2021
- 2021-03-22 US US17/207,987 patent/US20210211651A1/en active Pending
- 2021-04-16 JP JP2021069712A patent/JP7160135B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021114781A (ja) | 2021-08-05 |
| JP2020058025A (ja) | 2020-04-09 |
| BR112021005523A2 (pt) | 2021-06-29 |
| US20210211651A1 (en) | 2021-07-08 |
| CN112887719B (zh) | 2022-03-15 |
| EP3860122B1 (en) | 2024-03-27 |
| CN112887719A (zh) | 2021-06-01 |
| EP3860122A1 (en) | 2021-08-04 |
| CN112514378A (zh) | 2021-03-16 |
| KR20210022755A (ko) | 2021-03-03 |
| KR102702123B1 (ko) | 2024-09-02 |
| JP7160135B2 (ja) | 2022-10-25 |
| EP3860122A4 (en) | 2021-12-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6874804B2 (ja) | 画像復号装置、画像復号方法、及び画像復号プログラム | |
| US20230135855A1 (en) | Method and apparatus for processing a video signal | |
| KR20220044923A (ko) | 인트라 예측 모드 부호화/복호화 방법 및 컴퓨터로 읽을 수 있는 기록 매체 | |
| JP5167233B2 (ja) | 動きベクトル符号化方法、装置およびデータ記憶媒体 | |
| WO2013109066A1 (ko) | 화면 내 예측 모드 매핑 방법 및 이러한 방법을 사용하는 장치 | |
| JP2014531851A (ja) | 制限されたオフセット補償及びループフィルタに基づく映像符号化及び復号化方法、並びにその装置 | |
| JP2007074726A (ja) | 映像のイントラ予測符号化及び復号化方法、並びに装置 | |
| KR20120129726A (ko) | 인트라 예측 모드 복호화 방법 및 복호화 장치 | |
| US20150010069A1 (en) | Intra video coding in error prone environments | |
| JP7494886B2 (ja) | 画像符号化装置、画像符号化方法及び画像符号化プログラム、並びに画像復号装置、画像復号方法、及び画像復号プログラム | |
| CN114885160A (zh) | 视频编解码方法、装置、计算机可读介质及电子设备 | |
| EP4322528A1 (en) | Image encoding/decoding method and device for performing prediction of image on basis of multiple intra predictions, and method for transmitting bitstream | |
| EP4309365A1 (en) | Coding enhancement in cross-component sample adaptive offset | |
| JP2007208543A (ja) | 動画像符号化装置 | |
| JP2021192513A (ja) | 画像復号装置、画像復号方法、及び画像復号プログラム | |
| JP2014239504A (ja) | 復号化装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210201 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210201 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20210201 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20210311 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210323 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210405 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6874804 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |