本開示の実施形態は、反射鏡システム及び信号処理要素を備える光学デバイスを含んでいる。図3は、開示された装置に適用可能な反射鏡システムの基本要素を示す。反射鏡システムは、支持体300と、反射鏡302と、支持体から反射鏡を吊下げるバネ構造304、306、及び、308とを備える。
ここでは、支持体300という用語は、反射鏡システムを備える装置の一部、例えば、MEMS光学デバイスの一部とすることができる機械的要素を指す。あるいは、支持体は、装置に堅固に固定された別個の要素であってもよい。従って、支持体とは、ここでは、反射鏡システムの可動要素を固定することができる、又は、それから反射鏡システムの可動要素を吊下げることができる、剛性で、局所的に不活性な基準を提供する任意の要素を指す。反射鏡システムのいくつかの実施形態では、支持体は、反射鏡の下方に面外ギャップによって分離された支持層と、反射鏡をデバイス層内に懸架する要素とを備える。デバイス層内の支持体及び可動要素は、例えば、支持体300から突出する1つ以上の固定点312、314、及び、316を介して互いに連結されてもよい。あるいは、支持体は、支持体層の一部であるか、又は、支持体層に堅固に固定され、デバイス層内で反射鏡を囲むフレームを備えてもよい。反射鏡302という用語は、ここでは、光の入射波面を戻す固体反射面を含む任意の要素を指す。反射の法則は、各入射光線に対して、入射角が反射角と等しく、入射方向、法線方向、及び、反射方向は同一平面上にあると述べている。微小電気機械反射鏡システムでは、反射鏡の反射面は、例えば、反射コーティングで被覆されたシリコンプレートによって実現されてもよい。反射コーティングは、例えば、アルミニウム、銀、金又は銅のフィルムなどの1つ以上の金属薄膜層を含んでもよい。あるいは、コーティングは、異なる屈折率を有する1つ以上の誘電体フィルムのスタックを含んでもよい。当該フィルムは、スタックが光を反射するように配置される。有利には、反射面は平面である。
バネ構造は、1つ以上の吊下げ部材304、306及び308を備える。各吊下げ部材は、それが反射鏡の重量を支えるように可撓性を有するが、それはまた支持体300に対して反射鏡を動かす、又は、動かすことを可能にする。反射鏡の静的な非作動状態、すなわち、反射鏡が支持されているが動かない場合、プレートの平面反射面は反射鏡基準面を形成すると考えられる。吊下げ部材の材料の弾性により、各吊下げ部材の一部ひいては吊下げ部材に連結された反射鏡の一部は、支持体に対して少なくとも一方向に移動することができる。吊下げ部材304は、2つの端部、第1端部及び第2端部を有する細長い弾性要素を含んでもよい。吊下げ部材304の第1端部は、平面反射面の外縁部の第1連結点340に連結され、吊下げ部材304の第2端部は支持体内の第2連結点312に固定されてもよい。吊下げ部材は、反射鏡基準面の法線と平行な、少なくとも面外方向に偏向するように構成されてもよい。吊下げ部材は、例えば反射鏡を形成するプレートと同じシリコン基板層から形成されたシリコンビームであってもよい。
反射鏡システムは、反射鏡を機械的に作動させるための第1変換器構造を備えてもよい。図3の例示的な実施形態では、支持体から反射鏡を吊下げる吊下げ部材は、圧電アクチュエーターを備えてもよい。圧電アクチュエーターという用語は、ここでは、部品に印加された電圧に応じて物理的に変形する圧電部品を指す。アクチュエーターは、反射鏡が周期的なAC電圧信号で制御される場合に、反射鏡の振動運動を駆動するために使用され得る。吊下げ部材を面外方向にたわませる屈曲圧電アクチュエーターは、吊下げ部材上に被覆された圧電層と導電層とを含んでもよい。例えば、典型的なMEMS光学デバイスでは、電圧が印加された場合に、約50μmの厚さのシリコン層は、圧電材料と共に曲がるのに十分に薄い。屈曲圧電アクチュエーターは、駆動運動を容易にするために、窒化アルミニウムなどの圧電活性層を備えてもよい。屈曲圧電アクチュエーターは、圧電活性層の両側に金属電極層を備えてもよい。これにより、駆動運動は、圧電信号により制御され得る。電極は、例えば、モリブデン、アルミニウム又はチタンから製造されてもよい。
図3の例示的な微小電気機械反射鏡システムでは、吊下げ部材304、306、及び、308のそれぞれは、それぞれの固定点312、314及び316から支持体に固定されている。図3の吊下げ部材の構成は、例示的なものであり、吊下げ部材及び連結点の量、形態及び位置は、範囲内で変更可能である。連結点を介した連結は、固定されても伝達されてもよい。ここでは、固定された連結とは、吊下げ部材の端部が連結点にしっかりと設置又は固定される、機械的に剛性のある接続を指す。例えば、支持体への第2連結点312、314及び316は固定されてもよく、吊下げ部材アクチュエーターへの電気的接続の伝達のための経路を提供してもよい。伝達連結とは、ここでは、吊下げ部材の端部がそれらの間で偏向又は捩れ得る要素を介して連結点に接続されている構成を指す。例えば、破損の危険性を減らすために、吊下げ部材304の第1端部と反射鏡302内の第1連結点との間の接続は、要素342を通って面外方向に向かう第1連結点340の動きを直接中継する伝達連結であってもよいが、要素342は、吊下げ部材のたわみの端部でわずかな曲げを可能にする。
非作動状態の反射鏡の反射面が仮想基準面に整列すると考えられる場合、吊下げ部材の第2端部は、弾性を有する吊下げ部材304、306、308、及び、吊下げ部材上の圧電アクチュエーターによって面外方向に移動することができる。これらの変位は、反射鏡を2つの回転軸の周りの振動として表すことができる多方向走査運動に誘導するために適用されてもよい。図3では、第1回転軸326がY方向に整列して示されており、第2回転軸328がX方向に整列して示されており、ここでは、両方とも図面のページと整列する仮想基準面に示される。反射鏡302の振動は、細長い吊下げ部材304、306、308上に延在する1つ以上の屈曲圧電アクチュエーターに周期的AC電圧を印加することによって駆動することができる。
反射鏡の抑制された振動については、反射鏡システムは、反射鏡の機械的動きを表す検知信号を生成するように構成された第2変換器の構造を備えてもよい。これを達成するための1つの可能な方法は、吊下げ部材の実現された変位又はたわみを感知することである。このために、1つ以上の、有利には、全ての吊下げ部材に、圧電アクチュエーターに加えて圧電検知要素を設けてもよい。この例では、検知要素という用語は、反射鏡の動きによってそれに引き起こされる物理的な変形に応じて電圧信号を生成する圧電部品を指す。
第1トランスデューサー構造及び第2トランスデューサー構造は、バネ構造の各吊下げ部材がアクチュエーター要素と検知要素とを備えるように構成されてもよい。図4は、細長い圧電アクチュエーター400及び圧電検知要素402は、電気的に独立して延在するが、図3の吊下げ部材306上に並列に連結される例示的な配置を示す。制御要素への電気的接続は、1つ以上の第2連結点312、314、316を通して伝達されてもよい当然のことながら、他のトランスデューサーの構成も、本開示の範囲内で適用されてもよい。例えば、圧電トランスデューサーは、それらのコンパクトなサイズ及び低い駆動電圧要件により反射鏡システムの用途に有利である。しかしながら、容量性作動及びセンシングもまた、本開示の範囲内で適用することができる。容量性センシング及び検出の実施は、当業者によく知られているため、ここでは、より詳細には説明しない。
光学デバイスは、さらに信号処理要素を含んでもよい。信号処理要素は、第1トランスデューサー構造及び第2トランスデューサー構造に連結され、バネ構造の各吊下げ部材から検知信号を受信し、反射鏡を始動させるための作動信号を前述の吊下げ部材に供給するように構成されてもよい。具体的には、信号処理要素は、平面反射面の対称点における法線が、対称点における反射鏡基準面の法線の周りを周回する円形傾動運動のための動作信号をバネ構造の吊下げ部材に供給するように構成されてもよい。これに関連して、平面又は基準面への法線とは、所与の点で表面又は平面に垂直な線を指す。反射鏡の円運動では、所与の点は反射鏡の対称点である。定常的な円運動のために、反射鏡は典型的には円形であり、すなわち、その縁部は円を形成する。そのような場合、対称点は円の中心である。
光線が円形傾斜運動を受ける反射鏡に入射すると、反射光線は円形走査軌道を形成する。円形傾動運動は、周期的な動作信号を吊下げ部材に連続的に印加することによって引き起こされ得る。例えば、図3の構成では、吊下げ部材の第1端部は、支持体内のそれぞれの連結点に固定して連結されたままでよく、アクチュエーターは、吊下げ部材の第2端部が面外方向に連続した順序で変位するように捩れる又は曲がるように制御されてもよい。従って、抑制された作動を通して、反射鏡の縁部における連結点を面外方向に上下に順番に動かすことができる。円形走査軌道の場合、吊下げ部材は、全ての連結点が同じ振幅であるが反射鏡の縁部における連結点の位置に対応する位相差で面外方向に振動するように最適に作動される。有利には、連結点は、円形反射鏡の縁部に対称的に配置されている。実際には、360度の全円の円形反射鏡は、駆動する吊下げ部材の数で分割されてもよく、作動における位相差は、連結点と交差する半径間の角度に対応する。例えば、3つの吊下げ部材の位相差は、120度であり、4つの吊下げ部材の位相差は、90度であるなどである。
反射鏡システムの一般的な目的は、振動の達成に必要な消費電力が確実に最適化されることである。最大振幅応答は、共振モードで動作するように、すなわち、両方の振動が共通の共振周波数で生じるように反射鏡システムを設計することにより達成される。制御装置が、第1共振周波数F11で第1回転軸326を中心とする第1回転振動と、第2共振周波数F12で第2回転軸328を中心とする第2回転振動とを反射鏡302に同時に駆動させる制御信号を提供するように構成されるように、円形走査軌道は、モデル化されてもよい。第1回転軸326と第2回転軸とは直交しており、結果として生じる反射鏡302の位置は、第1回転振動と第2回転振動の重ね合わせである。反射鏡302の反射面に入射する光線が反射される場合、反射された光線の方向は入射時の反射鏡の位置に依存する。有利には、第1回転振動及び第2回転振動は、反射された光線が反射鏡システムの画像領域を形成する抑制された走査パターンに沿って移動するように、反射鏡を配置するように構成される。F11がF12と等しい場合、ここでは、F1と表される、円形傾動運動(往復モード走査運動とも呼ばれる)は、円形画像領域を通って走査する円形走査軌道をもたらす。そのような円形傾動運動は、式(1)及び式(2)で表される。
ここで、θxは、第1回転軸326に対する反射鏡302の表面の角度であり、θyは、第2回転軸328に対する反射鏡の表面の角度である。
図5は、拡大された画像領域を提供する抑制された走査パターンのために構成された光学デバイス用の反射鏡システムの一例を示す。反射鏡システムは、支持体500と、反射鏡502と、バネ構造の吊下げ部材504、506、508、510とを備える。これらの要素の基本は、図3及び図4の説明から参照されてもよい。反射鏡システムは、さらに、他のバネ構造の1つ以上の吊下げ部材520、522、524、526を介して反射鏡に連結された、慣性要素530、532、534、536を備える。反射鏡と慣性要素との間の1つ以上の吊下げ部材520、522、524、526によって形成されたバネ構造は、第1バネ構造体を構成する。反射鏡502、慣性要素530、532、534、536と、第1バネ構造体とを連結する1つ以上の吊下げ部材504、506、508、510によって形成されたバネ構造は、第2バネ構造体を構成する。第2バネ構造体の吊下げ部材504、506、508、510は、それぞれ、アクチュエーター要素及び検知要素(図示せず)を備えていてもよい。アクチュエーター要素は、それぞれ、吊下げ部材上に延在してもよく、作動信号に従って吊下げ部材を偏向させるように構成されてもよい。同じ吊下げ部材上に、吊下げ部材のたわみに応じて検知信号を出力するように構成された、対応する検知要素が延在してもよい。作動信号は、信号処理要素(図示せず)内で生成され、反射鏡システムのアクチュエーターに入力される。検知信号は、反射鏡システムで生成され、信号処理要素に入力される。
図5に示されるように、反射鏡システムは、可撓性を有する吊下げ部材520、522、524、526の第1バネ構造体を用いて反射鏡の動きに弾力的に連結された、1つ以上の慣性要素530、532、534、536を備えてもよい。反射鏡の動きは、第1バネ構造体の吊下げ部材を反射鏡自体に連結することによって直接的に、又は、第1バネ構造体の吊下げ部材を第2バネ構造体の吊下げ部材に連結することによって間接的に、慣性要素に伝達されてもよい。言いかえれば、第1バネ構造体の各吊下げ部材において、吊下げ部材の第1端部は、反射鏡又は第2バネ構造体中の連結点に連結され、吊下げ部材の第2端部は慣性要素に連結されてもよい。図5の例では、第1バネシステムの4つの吊下げ部材520、522、524、526は、それぞれ、反射鏡502の縁部の一点に連結され、それによって反射鏡502を動かしながら動く。なお、他の代替案については、後述する。
前述のように、第1バネ構造体又は第2バネ構造体における吊下げ部材の連結は固定されてもよく、又は、連動されてもよい。図5の例では、第2バネシステムの4つの吊下げ部材504、506、508、510のそれぞれは、面内方向に湾曲して延びる屈曲部と、屈曲部の一端と反射鏡502の外縁部における連結点との間で、面内方向に屈曲部の法線に対して垂直に延びる短いねじり部とを備える。一例として、図5は、吊下げ部材504の屈曲部560及びねじり部562を示す。さらに、第1バネシステムの4つの吊下げ部材520、522、524、526のそれぞれは、面内方向に直線的に延びる屈曲部と、屈曲部の一端と第2バネ構造体の連結点との間で面内方向に垂直に延びる短いねじり部とを備える。
一例として、図5は、吊下げ部材520の屈曲部570及びねじり部572を示す。第2バネシステムの吊下げ部材504と、第1バネシステムの吊下げ部材520のねじり部の軸とは一致している。ねじり部は、反射鏡の縁部における各連結点の面外運動がねじり部を介して屈曲部の連結された端部に直接伝達されるように面外方向に剛性である。ねじり部は、反射鏡、第1バネシステム及び第2バネシステムを面内方向に互いに遠ざける。ねじり部は、必ずしも必要ではないが、構造体の疲労及び破損の危険性を低減するために、ある程度までねじれてもよい。
第1及び第2バネシステムの構成では、反射鏡の質量と慣性質量とが連結して連成振動子を形成する。図6A及び図6Bのブロック図は、連成振動子の例示的な構成を示す。図6Aは、図5に対応しており、ここでは、第1バネシステムが反射鏡の縁部における連結点に連結されている。参照番号k1は、第1バネ構造体の吊下げ部材520のバネ効果及び第2バネ構造体の吊下げ部材504のバネ効果を表すと考えられてもよい。M1は、第2バネ構造体の吊下げ部材504に対する反射鏡の質量を表し、M2は、慣性要素530の質量を表すと考えられてもよい。図6Bのブロック図は、後述する図8に対応する連成振動子の構成を示しており、第1バネシステムが第2バネ構造体の吊下げ部材内の連結点に連結されている。参照番号k1は、第1バネ構造体の吊下げ部材520のバネ効果を表すと考えられてもよく、参照符号k2は、吊下げ部材504のバネ効果を表すと考えられてもよい。M1は、第1バネ構造体の吊下げ部材504に対する反射鏡の質量を表すと考えられてもよく、M2は、慣性要素530の質量を表すと考えられてもよい。
図6A及び図6Bの連成振動子では、2つの質量M1及びM2は、それらの動きが独立しないように連結されている。面外方向におけるそれらの平衡位置からのM1及びM2の変位は、同じ方向ではあるが、周波数及び位相が異なる2つの単振動の干渉の結果として生じる。図5のような構成では、1以上の慣性要素は、円形傾動運動が2つの振動モード、第1振動モードの第1共振周波数及び第2振動モードの第2共振周波数を有するように反射鏡要素に対して寸法設定できることが分かった。なお、第1共振周波数は、第2共振周波数とは異なる。次いで、信号処理要素は、第1振動モードでは一定の第1振幅を維持し、第2振動モードでは一定の第2振幅を維持する作動信号を提供するように構成されてもよい。結果として、円形傾動運動は、反射光線の傾斜角が制御可能に変化する走査パターンを形成する。そのような円形傾動運動は、式(3)及び(4)で表される。
ここで、θyは、第1回転軸550に対する反射鏡502の表面の角度であり、θxは、第2回転軸552に対する反射鏡の表面の角度である。第1回転軸と第2回転軸は、反射鏡の平面に沿って配列され、互いに直交している。A1は、第1振動モードの選択振幅であり、A2は、第2振動モードの選択振幅である。F1は、第1共振周波数、すなわち、第1振動モードの共振周波数であり、F2は、第2共振周波数、すなわち、第2振動モードの共振周波数である。
第2振動モードの円形走査軌道は、制御装置が、第2共振周波数F21で第3回転軸を中心とする第3回転振動と、第2共振周波数F22で第4回転軸を中心とする第4回転振動とを反射鏡502に同時に駆動させる制御信号を提供するように構成されるように、第2振動モードの円形走査軌道は、対応してモデル化されてもよい。第2に駆動する制御信号を提供するように構成される。図5では、第3回転軸は、第1回転軸550と一致し、第4回転軸は、第2回転軸552と一致する。しかしながら、本明細書の図面に示される回転軸は、例示的な例に過ぎない。第1及び第2回転軸は、必ずしも反射鏡に対するバネシステムの連結点と一致しない。さらに、第1振動モードのための第1及び第2回転軸は、第2振動モードのための第3及び第4回転軸と異なってもよい。しかしながら、第1振動モードでは、第1回転軸と第2回転軸とは、反射面の平面内にあり、互いに直交しており、第2振動モードでは、第3回転軸と第4回転軸とは、反射面の平面内にあり、互いに直交している。
従って、第3回転軸と第4回転軸とは直交し、第2振動モードによって結果として生じる反射鏡502の位置は、第3回転振動と第4回転振動との重ね合わせである。F21がF22(ここでは、F2として示される)と等しい場合、反射鏡の走査運動は、円形の画像領域を通って走査する他の円形走査軌道を形成する。式(3)及び(4)に示されるように、第1振動モードと第2振動モードとの組み合わせは、拡大された画像領域を有する円形傾動運動をもたらす。第1振動モードと第2振動モードとの組み合わせから生じる円形傾動運動の最小振幅は、|A1−A2|であり、最大振幅は、|A1+A2|である。従って、式(3)及び(4)の円形傾動運動において反射鏡から反射される光線の傾斜角は、一定の半径を有する円でなく、2つの極値間で変化する。第1共振周波数F1と第2共振周波数F2とが、互いに関して適切に選択される場合、規定のシステムフレームレートfFRでそれ自体を繰り返す、拡大された走査パターンを達成することができる。図7は、式(3)及び(4)の円形傾動運動においてミラーの表面から反射される光線によって形成されるパターンの一例を示す。図7のパターンでは、線内の各位置は、定義された時点におけるシステムフレーム内の座標に対応する。所望のシステムフレームレートfFRについて、第1共振周波数F1と第2共振周波数F2との間の関係は、式(5)で表される。
ここでは、nは整数である。図7のパターンに適用される例示的な振幅(反射鏡角度)及び周波数値は、以下の通りである。A1=7.5度、A2=5度、F1=2000Hz、F2=1015Hz、n=2、fFR=30Hzである。
実用的な実施における適切な設計の課題は、反射鏡が揺動し、慣性要素がそれに対応して動くための面外方向の自由空間が、非常に限られていることである。図8は、図6Bに示される連成振動子を備える代替構造を示す。この構造では、反射鏡システムは、図5で説明され、さらに図3及び図4でも説明された基本部品500、502、504、508及び510を同様に備える。さらに、この構成は、可撓性を有する吊下げ部材520、522、524、526を備える第1バネ構造体を用いて反射鏡要素に弾力的に連結された1つ以上の慣性要素530、532、534、536を含む。前述のように、図6Bの構成では、第1バネ構造体の各吊下げ部材の第1端部は、第2バネ構造体の吊下げ部材内の連結点に連結され、吊下げ部材の第2端部は慣性要素に連結される。図8の例では、第1バネシステムの4つの吊下げ部材520、522、524、526はそれぞれ、第1バネシステムのそれぞれの吊下げ部材504、506、508、510内の連結点に連結されている。しかしながら、第1バネ構造体の吊下げ部材が第2バネ構造体に連結する点は、第2バネ構造体の吊下げ部材の屈曲部とねじり部とが交わる点ではなく、反射鏡の連結が面外方向に剛性である点ではない。第1バネ構造体の吊下げ部材はそれぞれ、支持体500への連結点と反射鏡502への連結点との間の点での第2バネ構造体の吊下げ部材に連結する。例えば、図8の例示的な構造では、第1バネ構造体の吊下げ部材520は、吊下げ部材504の支持部への連結点540と吊下げ部材504の反射鏡502への連結点548との間の点で、第2バネ構造体の吊下げ部材504に連結する。この例では、連結点は、第2バネ構造体の吊下げ部材の屈曲部の中央にあるが、本開示の範囲内で他の位置も可能である。連結点は、反射鏡の動きと共に移動するため、慣性要素と反射鏡との間に弾性的な接続を提供する。しかしながら、第2バネ構造体への接続点では、面外運動は反射鏡の縁部におけるよりも既に小さい。異なる構成の効果は、反射鏡の動きへの必要な連結が、面外方向への動きのより少ない空間を必要とする慣性要素を用いて達成され得ることである。言いかえれば、第1バネ構造体の吊下げ部材の連結点が、第2バネ構造体の吊下げ部材の端部にない場合、バネシステムによって指示されている慣性要素の振幅は、面外方向において、より小さいままである。これは、反射鏡の揺動運動の面外振幅のためのより多くの空間を可能にする。
図5及び図8の構成は、第2バネ構造体の外側の空間を有効に使用するように設計されており、したがって、矩形の装置寸法を有する光学デバイスに特に最適である。図9は、図6Bの連成振動子のためのもう1つの代替構造を示す。当該代替構造は、第2のバネ構造内の空間を有効に使用している。この構成では、反射鏡システムは、図5で説明され、さらに図3及び図4でも説明された、基本部品500、502、504、506、508、510を同様に備える。さらに、この構成は、可撓性を有する吊下げ部材520、522、524、526を備える第1バネ構造体と反射鏡要素に弾性的に連結された1つ以上の慣性要素530、532、534、536を含む。第1バネ構造体の各吊下げ部材では、吊下げ部材の第1端部は、第2バネ構造体内の連結点に再び連結され、吊下げ部材の第2端部は慣性要素に連結される。図9の例では、第1バネシステムの4つの吊下げ部材520、522、524、526はそれぞれ、第2バネシステムのそれぞれの吊下げ部材504、506、508、510内の連結点に連結される。
図10は、図6Aの連成振動子のための代替構造を示す。当該代替構造も、第2バネ構造体内の空間を有効に使用している。この構成では、反射鏡システムは、図5で説明され、さらに図3及び図4で説明された基本部品500、502、504、506、508、510を同様に含む。さらに、この構成は、可撓性を有する吊下げ部材520、522、524、526を備える第1バネ構造体を用いて反射鏡要素に弾性的に連結された1つ以上の慣性要素530、532、534、536を含む。第1バネ構造体の各吊下げ部材では、吊下げ部材の第1端部は、反射鏡要素内の連結点に再び連結され、吊下げ部材の第2端部は慣性要素に連結される。図8の例では、第1バネシステムの4つの吊下げ部材520、522、524、526はそれぞれ、反射鏡502の縁部にある連結点に連結される。第2バネシステムの4つの吊下げ部材504、506、508、510のそれぞれ、及び、第1バネシステムの4つの吊下げ部材520、522、524、526のそれぞれは、面内方角に湾曲して延びる屈曲部と、屈曲部の一端と反射鏡502の外縁部の連結点との間で屈曲部の法線に垂直な面内方向に延びる短いねじり部とを備える。第1バネ構造体のねじり部は、第2バネ構造体のねじり部よりも長いので、これらのバネ構造は機械的に離れている。
図11A及び図11Bは、それぞれ、図6A及び図6Bの連成振動子のための代替構造を示す。これらの構造では、反射鏡は第1バネ構造体の3つの吊下げ部材によって支持され、第2振動モードは第2バネ構造体で反射鏡に連結された3つの慣性要素によって作り出される。図11A及び11Bの構成では、反射鏡システムは、支持体1100、反射鏡1102、及び、3つの吊下げ部材1104、1106、1108を備える第2バネシステムを含み、これらはそれぞれ、図5で説明された基本部品500、502、504、506、508に対応する。さらに、この構成は、可撓性を有する吊下げ部材1120、1122、1124を備える第1バネ構造体を用いて反射鏡要素に弾性的に連結された3つの慣性要素1130、1132、1134を含む。図11Aは、図6Aの配置を表しているので、第1バネ構造体の各吊下げ部材では、吊下げ部材の第1端部は、反射鏡要素中の連結点に再び連結され、吊下げ部材の第2端部は慣性要素に連結される。動作中、反射鏡内の連続する連結点中のいずれかのモードの振動における位相差は、120度である。図5、図8、図9及び図10の構成では、位相差は90度である。図11Bは、図6Bの配置を表す。図11Bは、図11Aに非常によく似ているが、第1バネ構造体の各吊下げ部材では、吊下げ部材の第1端部は第2バネ構造体内の連結点に連結され、吊下げ部材の第2端部は慣性要素に連結される。
図12A及び図12Bは、それぞれ、図6A及び図6Bの連成振動子のための代替構造を示す。これらの構造では、反射鏡はさらに第2バネ構造体の3つの吊下げ部材に支持され、第2振動モードは第1バネ構造体で反射鏡に連結された3つの慣性要素で引き起こされる。図9及び図10の構造として、これらの構造は、さらに第2バネ構造体内の空間を有効に使用する。図12A及び図12Bの構成では、反射鏡システムは、支持体1200、反射鏡1202、及び、3つの吊下げ部材1204、1206、1208を備える第2バネシステムを含み、これらはそれぞれ図5で説明された基本部品500、502、504、506、508に対応する。さらに、この構成は、可撓性を有する吊下げ部材1220、1222、1224を備える第1バネ構造体を用いて反射鏡要素に弾性的に連結された3つの慣性要素1230、1232、1234を含む。図12Aは、図6Aの配置を表しているので、第1バネ構造体の各吊下げ部材では、吊下げ部材の第1端部は、反射鏡要素内の連結点に再び連結され、吊下げ部材の第2端部は慣性要素に連結される。動作中、反射鏡内の連続する連結点におけるいずれかのモードの振動における位相差は、120度である。図12Bは、図6Bの配置を表している。それは、図12Aとかなり一致するが、第1バネ構造体の各吊下げ部材では、吊下げ部材の第1端部は第2バネ構造体中の連結点に連結され、吊下げ部材の第2端部は慣性要素に連結される。
図13は、慣性要素が基準面内の反射鏡によって囲まれた1つの剛体質量である、さらなる実施形態を示す。言いかえれば、反射鏡システムの非作動状態では、慣性要素の上面は平面であり、反射鏡の平面反射面に沿って配列され、反射鏡の平面反射面によって囲まれている。図13の構成では、円形反射鏡は環状形状を有し、慣性要素を囲む。連成振動のための合理的な質量を可能とするために、慣性要素の底面は、有利には、反射鏡の底面に沿って配列されない。反射鏡及び慣性要素の寸法は、2つの所望の共振周波数を有する連成振動子を形成するように調節されてもよい。図13の構成では、反射鏡システムは、支持体1300、反射鏡1302、及び、4つの吊下げ部材1304、1306、1308、1310を備える第2バネシステムを含み、これらはそれぞれ、図5で説明された基本部品500、502、504、506、508、510に対応する。さらに、この構成は、可撓性を有する吊下げ部材1320、1322、1324、1326を備える第1バネ構造体を用いて反射鏡要素に弾性的に連結される慣性要素1330を含む。図13の例示的な構成では、第1バネ構造体及び第2バネ構造体の慣性要素1330への連結点は、互いから約45度の距離で半径方向に交互に分布している。代替の連結構造は、本開示の範囲内で適用されてもよい。例えば、第1バネ構造体及び第2バネ構造体の慣性要素1330への連結点は、互いに90度の距離をおいて半径が一致してもよい。
図14は、慣性要素が基準面内の反射鏡内の剛性質量体である、さらなる実施形態を示す。言いかえれば、反射鏡システムの非作動状態で、慣性要素の上面は平面であり、反射鏡の平面反射面に沿って配列され、反射鏡の平面反射面は慣性要素を囲む。慣性要素の底面は、必ずしも反射鏡の底面に沿って配列される必要はない。図14の構成では、反射鏡システムは、支持体1400、反射鏡1402、及び、4つの吊下げ部材1404、1406、1408、1410を備える第2バネシステムを含み、それらはそれぞれ、図5で説明された基本部品500、502、504、506、508、510に対応する。さらに、この構成は、可撓性を有する吊下げ部材1420、1422、1424、1426を備える第1バネ構造体を用いて反射鏡要素に弾性的に連結される慣性要素1430を含む。有利には、この構成では、光源の中央部分は、慣性要素の非反射部分及び第1バネ構造体の吊下げ部材への光線の入射を回避するために遮断されてもよい。
図示されるように、円形傾動運動のための2つの振動モードは、広範囲の異なる様々な構造変化で実現されてもよい。バネ効果は、例えば、ここで示されている直線状又は湾曲した屈曲部を備える様々な吊下げ部材直線の屈曲部又は曲げられた屈曲部、もしくは、ここに示された直線状のねじれ部品を含む様々な吊下げ部材の形態で実現されてもよい。吊下げ部材は、組み合わされた形態の吊下げ部材が面外方向に連成振動子の所望のバネ効果を提供する限り、他の任意の形態の部品をさらに備えてもよい。1つ又は2つのアクチュエーター要素のみを用いた円形傾動運動の作動は、実際には、非常に困難であり得るが、吊下げ部材の数も変化し得る。
前述のように、光学要素は、反射鏡システムに作動信号を供給するように、かつ反射鏡システムから検知信号を受信するように反射鏡システムに接続された信号処理要素を含む。図4に示されるように、第2バネ構造体の吊下げ部材は、アクチュエーター要素と検知要素とを含むように構成されてもよく、アクチュエーター要素は作動信号に従って吊下げ部材をたわませるように構成されてもよく、検知要素は、吊下げ部材のたわみによって検知信号を出力するように構成されてもよい。信号処理要素は、例えば、連結点を介して支持体に配線することによって第2バネ構造体に連結され、それによってそのような吊下げ部材から検知信号を受信し、前述の吊下げ部材に作動信号を供給するように構成されてもよい。
検知信号は、吊下げ部材の検知された動きに従って変化するため、吊下げ部材上の作動要素及び検知要素の共存は、吊下げ部材を作動させるために作動信号のレベルが吊下げ部材の検知された動きのレベルに基づいて決定されるフィードバック動作を可能にする。決定された作動信号は、検知信号に対して−90度の位相シフトで吊下げ部材に供給されてもよい。ここで開示されるシステムでは、信号処理要素は、第1振動モードを作動させるための構成要素及び第2振動モードを作動させるための構成要素を含む作動信号を吊下げ部材のアクチュエーターに供給するように構成されてもよい。さらに、信号処理要素は、第1振動モードで規定された第1振幅を維持し、第2振動モードで規定された第2振幅を維持するための作動信号を提供するように構成されてもよい。
図15のブロック図は、第2バネシステムが3つの吊下げ部材を含み、図3の構成に適用可能な信号処理要素の主要な機能要素を示す。ここで開示されるブロック図の機能要素は、以下に説明される機能を実行するために1つ以上の入力と1つ以上の出力との間で相互に連結される電気部品の組み合わせを表す。開示された機能は、当業者に周知の方法で、異なるアナログ及びデジタル構成要素を組み合わせることにより、多くの様々な方法で実現され得ることは明らかである。
図16に示されるように、第2バネ構造体のこれらの吊下げ部材のそれぞれは、連結点P11、P21、P31で反射鏡REFに連結される。連結点は、それらの位置が所定の角度で分離されるように、反射鏡の縁部に対称的に分割されてもよい。この例では、所定の角度は、120度である。図15では、信号S11、S21、S31は、それぞれ、連結点P11、P21及びP31の吊下げ部材上の検知要素によって生成された検知信号を表す。これらの検知信号S11、S21、S31のそれぞれは、第1共振周波数F1中の第1振動モードの成分と、第2共振周波数F2中の第2振動モードの成分とを含む。
検知信号S11、S21、S31は、デジタルフォーマットへの変換のためにそれらをスケーリングするアナログフロントエンド要素AFEに供給されてもよい。また、AFEは、不要な周波数を減らすための初期フィルタリングを含んでいてもよい。このために、AFEは、例えば、ハイパスフィルタ、ローパスフィルタ、又は、両方のタイプのフィルタを含んでいてもよい。スケーリングされた検知信号S12、S22及びS32は、アナログデジタル変換を行ない、デジタル検知信号S13、S23及びS33を信号分離要素DIVに供給するアナログデジタル変換器ADCに供給される。また、ADCは、一定の利得によって信号を増幅させてもよい。DIVは、各デジタル検知信号S13、S23、S33から、第1振動モードの検知信号成分S14.1、S24.1、S34.1と、第2振動モードの検知信号成分S14.2、S24.2、S34.2とを分離する。
従って、図15を考慮すると、検知信号成分S14.1は、スケーリングされた検知信号S12から導出されるデジタル検知信号13の(周波数F1を有する)第1振動モードの信号成分を含む。スケーリングされた検知信号S12は、反射鏡REFの端部の点P11に結合された吊下げ部材の検知要素から受信される検知信号S11からスケーリングされる。それに対応して、検知信号成分S14.2は、デジタル検知信号S13中に(周波数F2を有する)第2振動モードの信号成分を含む。検知信号成分S24.1は、第1振動モードの信号成分を含み、検知信号成分S24.2は、点P21の検知信号S21から導出された第2振動モードの信号成分を含む。それに対応して、検知信号成分S34.1は、第1振動モードの信号成分を含み、デジタル信号S34.2は、点P31の検知信号S31から導出された第2振動モードの信号成分を含む。
第1周波数F1及び第1振幅A1での円形傾動運動のための第1振動モードは、少なくとも1つの吊下げ部材のアクチュエーターにそのアクチュエーターの検知信号に対して−90度の位相シフトである作動信号(駆動信号)を供給することにより維持され得る。それに対応して、第2周波数F2及び第2振幅A2での円形傾動運動のための第2振動モードは、少なくとも1つの吊下げ部材のアクチュエーターにそのアクチュエーターのそれぞれの検知信号に対して−90度の位相シフトである作動信号(駆動信号)を供給することにより維持され得る。第1振動モードのための別々に振幅位相制御された作動信号成分と、第2振動モードのための別々に振幅位相制御された作動信号成分との合計は、吊下げ部材のアクチュエーターに提供されてもよい。
有利には、合計された作動制御信号は、第2バネ構造体の吊下げ部材に連続した順序で提供され得る。DIVにおける信号分離により、第1の振幅A1及び第2振幅A2は、別々に一定に維持され得る。図15の例は、そのような構成に関して説明されている。しかしながら、感知及び作動のためにすべての吊下げ部材を使用することは必須ではない。第1振動モード及び第2振動モードの両方に同じアクチュエーターを使用することもできない。1つの振動モードの検知信号と作動信号との間の−90度の位相差がアクチュエーターに対して維持され得る限り、一組の1以上のアクチュエーターを第1振動モード専用にし、他の一組の1以上のアクチュエーターを第2振動モード専用にしてもよく、これらの振動モードの振幅は、別々に制御されてもいい。
図15を考慮すると、第1振動モードの検知信号成分S14.1、S24.1、S34.1は、振幅位相制御要素APCに入力されてもよい。まず、受信された検知信号成分S14.1に着目する。APCは、受信された検知信号成分S14.1から検出された振幅値を決定し、検出された振幅値を目標の第1振幅A1に対応する所定の目標値と比較するように構成される。比較に基づいて、APCは、検出されたS14.1の振幅値と目標値との間の差分を最小にする作動信号成分S15.1を生成するように構成される。作動信号成分S15.1は、P11の吊下げ部材における作動力を制御する。検出された振幅が大きすぎる場合、APCは、作動信号成分S15.1を減少させ、それによってP11の吊下げ部材における第1振動モードのための作動力を減少させる。APCは、検出された振幅をより速く減少させるための破壊力を生み出すために利得の極性を変えることさえもし得る。検出された振幅が小さすぎる場合、APCは、作動信号成分S15.1を増大させ、それによってP11の吊下げ部材における第1振動モードのための作動力を増加させる。APCは、また、作動信号成分S15.1と検知信号成分S14.1(すなわち検知信号S11)との間に90度の位相シフトを生じさせる。APCは、検知信号成分S24.1及びS34.1に対して同じ制御操作を実行してもよい。信号S14.1及びS15.1、信号S24.1及び信号S25.1、並びに、信号S34.1及びS35.1の間の位相シフトは、例えば−90度である。連結点P11とP21との間の角度、及び、連結点P21とP31との間の角度は、120度である。そのため、信号S15.1、S25.1及びS35.1の間の位相シフト、並びに、信号S15.2、S25.2、S35.2の間の位相シフトも、120度である。
次の位相では、各アクチュエーターの第1振動モード及び第2振動モードの振幅制御された信号と位相シフトされた信号とが合計される。図15の例を考慮すると、点P11に連結された吊下げ部材のアクチュエーターの第1振動モードの作動信号成分S15.1と第2振動モードの作動信号成分S15.2とは、合計作動信号S16に合計される。点P21に連結された吊下げ部材のアクチュエーターの合計作動信号S26を生成するために信号S25.1及びS25.2に対して同様の合計動作が行われ、合計作動信号S36を生成するために信号S35.1及びS35.2に対して同様の合計動作が行われる。この時点で、デジタル加算作動信号S16、S26、S36は、デジタル−アナログ変換器DACでアナログ作動信号S17、S2、S37に変換され得る。デジタル−アナログ変換は、一定の利得で実施されてもよい。デジタル−アナログ変換器は、起動中及び「通常動作モード」中に異なる利得設定を有してもよい。その結果、最大駆動信号が必要とされない可能性がある場合、起動中に利得が最大となり、その後、「通常動作モード」中に、より小さい量子化ステップ値を達成するために、利得を下げてもよい。図15に示されるように、第1振動モード及び第2振動モードの、振幅制御され、かつ、適切に位相シフトされた成分を含む作動信号S17、S27、S37は、次いで、それらをそれぞれの吊下げ部材のアクチュエーターに制御可能に供給する作動電圧バッファーAVBにバッファーされてもよい。
本実施の形態に適用されるアナログ及びデジタルドメインの間の分割は、例示に過ぎない。本明細書に記載されている機能要素のための信号処理は、当業者にはよく知られている方法で、デジタル及び/又はアナログ要素の様々な異なる組み合わせで実現されてもよい。
図17は、図15のDIVにおける信号分離のための例示的な実施形態を示す。S13のような入力デジタル検知信号は、2つのノッチフィルタに分割されてもよい。各ノッチフィルタは、狭い周波数帯域を遮断し、残りのスペクトルは殆ど変化しない。図17では、n(F1)は、F1の周波数を遮断するノッチフィルタを表し、n(F2)は、F1の周波数を遮断するノッチフィルタを表す。入力デジタル検知信号S13は、周波数F1を有する第1振動モードの成分と、周波数F2を有する第2振動モードの成分とを含む。ノッチフィルタn(F2)は、第2振動モードの成分を遮断し、その結果、フィルタリングの後、出力検知信号成分S14.1は周波数F1を有する第1振動モードの成分のみを含む。それに対応して、ノッチフィルタn(F1)は、第2振動モードの成分を遮断し、その結果、フィルタリングの後、出力検知信号成分S14.2は周波数F2を有する第1振動モードの成分のみを含む。他の信号分離手段は、本開示の範囲内で適用されてもよい。
図18は、図15のAPCにおける振幅位相制御のための例示的な実施形態を示す。図18では、入力Din1、Din3、Din5は、それぞれ、第1振動モードの検知信号成分S14.1、S24.1、S34.1に対応する。それに対応して、出力Dout1、Dout3、Dout5は、それぞれ、第1振動モードの検知信号成分S15.1、S25.1、S35.1に対応する。第1振動モードの第1振幅に対応する目標値は、targ1として示される。例示的な構造は、比例積分微分制御器(PID制御器)が検知された振動の振幅の連続的に変調された制御を提供する制御ループフィードバック機構を含む。ここで、PID制御器は、受信信号の検出振幅値とPID制御器の目標値との間の差に対応する誤差値を計算するように構成されてもよい。誤差値に基づいて、PID制御器は、作動信号成分を増加、維持、又は減少させるために使用することができる利得値を算出することにより補正を実行してもよい。PID制御器は、実施形態の単なる1つの選択肢である。例えば、比例要素、積分要素、又は、微分要素のうちの1つ又は2つをフィードバック制御器から省略されてもよい。
図18の例は、6つの機能的なPID要素ADC1、ADC2、ADC3、ADC4、ADC5及びADC6を含む。1つ目のADC1は、第1振動モードの振幅A1のための目標値targ1と、連結点P11の吊下げ部材の検知信号S11から導出された検知信号成分S14.1とを入力してもよい。次いで、1つ目のADC1は、S14.1の検出された振幅値を決定し、それをtarg1と比較し、これらの2つの間の差分を最小にする利得制御値g1を出力する。図18に示されるように、Dout1から出力されるべき連結点P11の吊下げ部材のアクチュエーターの、振幅制御され、かつ、−90度位相シフトされた作動信号成分S15.1は、1つ目のADC1からの利得制御値g1を連結点の吊下げ部材の検知信号から導出されたデジタル信号成分S34.1と乗算し、かつ、乗算された信号を30度まで位相シフトすることによって生成されてもよい。
同様の構成を適用して、連結点P21の吊下げ部材のアクチュエーターのDout3から出力される作動信号成分S25.1を生成し、連結点P31の吊下げ部材のアクチュエーターのDout5から出力される作動信号成分S35.1を生成してもよい。図18では、Dout3への作動信号成分S25.1は、2つ目のADC2からの利得制御値g2に、連結点P11の吊下げ部材の検知信号から導出された検知信号成分S14.1と乗算し、乗算された信号を30度まで位相シフトすることによって生成される。Dout5への作動信号成分S35.1は、3つ目のADC3からの利得制御値g3と連結点P21の吊下げ部材の検知信号から導出された検知信号成分S24.1とを乗算し、乗算された信号を30度まで位相シフトすることによって生成される。なお、全ての出力Dout1、Dout3、Dout6のA1の振幅目標値targ1は同じである。
図18に、入力Din2、Din4、Din6は、それぞれ、第2振動モードの検知信号成分S14.2、S24.2、S34.2に対応する。それに対応して、出力Dout2、Dout4、Dout6は、それぞれ、第2振動モードの作動信号成分S15.2、S25.2、S35.2に対応する。第1振動モードのデジタル信号成分に適用されたものと同様の構成を適用して、出力Dout2、Dout4、Dout6から出力されるべき作動信号成分を生成してもよい。図18では、Dout2への作動信号成分S15.2は、4つ目のADC4からの利得制御値g4と連結点P31の吊下げ部材の検知信号から導出された検知信号成分S34.2とを乗算し、乗算された信号を30度まで位相シフトすることによって生成される。Dout4への作動信号成分S25.2は、5つ目のADC5からの利得制御値g5と連結点P11の吊下げ部材の検知信号から導出された検知信号成分S14.2とを乗算し、乗算された信号を30度まで位相シフトすることによって生成される。Dout6への作動信号成分S35.2は、6つ目のADC6からの利得制御値g6と連結点P21の吊下げ部材の検知信号から導出された検知信号成分S24.2とを乗算し、乗算された信号を30度まで位相シフトすることによって生成される。なお、全ての出力Dout2、Dout4、Dout6のA2の振幅目標値targ2は同じである。
図19のブロック図は、図5のような構成に適用可能な信号処理要素の主要な機能要素を示しており、第2バネシステムは、4つの吊下げ部材を含む。図20に示されるように、第2バネ構造体のこれらの吊下げ部材のそれぞれは、連結点P11、P21、P31、P41で反射鏡REFに連結する。連結点は、それらの位置が所定の角度で分離されるように、反射鏡の縁部に対称的に分割されてもよい。この例では、所定の角度は、90度である。信号S11、S21、S31及びS41は、それぞれ、連結点P11、P21、P31、P41の吊下げ部材上の検知要素によって生成された検知信号を表す。これらの信号S11、S21、S31、S41のそれぞれは、第1共振周波数F1における第1振動モードの成分と、第2共振周波数F2における第2振動モードの成分とを含む。
検知信号S11、S21、S31、S41は、デジタルフォーマットへの変換のためにそれらをスケーリングするアナログフロントエンド要素AFEに供給される。AFEは、さらに、不要な周波数を減らすための初期フィルタリングを含んでもよい。これについて、AFEは、例えば、ハイパスフィルタ、ローパスフィルタ又は両方の種類のフィルタを含んでもよい。4つの吊下げ部材を有する構造では、図15〜図18を用いて上述したように、各検知信号を別々に処理することが可能である。あるいは、装置の動作寿命における構造的変動の影響を排除する、又は、少なくとも低減する差動検波のための連結点の本質的に直交する位置決めを利用することが可能である。この代替案は、図19の例で説明されている。
従って、スケーリングされた検知信号S12、S22、S32、S42は、アナログデジタル変換を実行するアナログデジタル変換器ADCに供給され、2つの差動検出信号Sx3及びSy3を生成する。第1差動検出信号Sx3は、対向位置P11及びP31からの信号を減算することにより生じ、第2差動検出信号Sy3は、対向位置P21及びP41からの信号を減算することにより生じる。対向位置P11及びP31の方向は、x方向に対応するように示され、この結果として、対向位置P21及びP41の方向は、x方向に直交するy方向に対応するように示される。また、ADCは、Sx3=G(S12−S32)及びSy3=G(S22−S42)となるように一定の利得Gを導入することにより信号Sx3及びSy3を増幅してもよい。
次に、ADCは、作動検出信号Sx3及びSy3を信号分離要素DIVに供給してもよい。DIVは、第1振動モードの検知信号成分Sx4.1(第1振動モードのSx4.1)及び検知信号成分Sx4.2(第2振動モードのSy4.2)からSx3及びSy3を分離する。図19を考慮すると、検知信号成分Sx4.1は、差動検出信号Sx3の第1振動モード(周波数F1)、すなわち、アナログ信号S12及びS32から差動的に導出された信号を含む。これらのアナログ信号は、点P11に連結された吊下げ部材の検知要素から受信された検知信号S11と、反射鏡REFの端部の点P31に連結された吊下げ部材の検知要素から受信された検知信号S31とからスケーリングされた。これに対応して、検知信号成分Sx4.2は、差動検出信号Sx3の第2振動モード(周波数F2)の信号成分、すなわち、点P11及び点31の吊下げ部材を通して差動的に導出された信号を含む。検知信号成分Sy4.1は、差動検出信号Sy3の第1振動モード(周波数F1)の信号成分、すなわち、アナログ信号S22及びS42から差動的に導出される信号を含む。これらのアナログ信号は、点P21に連結された吊下げ部材の検知要素から受信された検知信号S21と、反射鏡REFの端部の点P41に連結された吊下げ部材の検知要素から受信された検知信号S41とからスケーリングされた。これに対応して、検知信号成分Sy4.2は、差動検出信号Sy3の第2振動モード(周波数F2)の信号成分、すなわち、点P21及びP41の吊下げ部材を通して差動的に導出された信号を含む。
図21は、図19のDIVにおける信号分離のための例示的な実施形態を示す。入力差動検出信号Sx3は、2つのノッチフィルタに分割することができる。各ノッチフィルタは、狭い周波数帯域を遮断し、残りのスペクトルが殆ど変化しない、図21では、n(F1)は、再び周波数F1を遮断するノッチフィルタを示し、n(F2)は、F1の周波数を遮断するノッチフィルタを示す。入力差動検出信号Sx3及びSy3は、周波数F1を有する第1振動モード、及び、周波数F2を有する第2振動モードの成分を含む。ノッチフィルタn(F2)は、第2振動モードの成分を遮断し、その結果、フィルタリングの後、出力検知信号成分Sx4.1及びSy4.1は、周波数F1を有する第1振動モードの成分のみを含む。それに対応して、ノッチフィルタn(F1)は、第2振動モードの成分を遮断し、その結果、フィルタリングの後、出力検知信号成分Sx4.2及びSy4.2は、周波数F2を有する第1振動モードの成分のみを含む。他の信号分離手段は、本開示の範囲内で適用されてもよい。
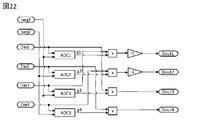
図19を再び参照すると、デジタル信号成分Sx4.1、Sx4.2、Sy4.1、Sy4.2は、振幅位相制御要素APCに入力されてもよい。図22を用いてより詳細に説明するように、APCは、受信信号Sx4.1、Sy4.1から検出振幅値を決定し、検出振幅値を、目標とする第1振幅A1に対応する所定の目標値と比較するように構成される。比較に基づいて、APCは、検出振幅値とA1の目標値との間の差分を最小にする作動信号成分Sx5.1及びSy5.1を生成するように構成される。それに対応して、APCは、受信信号Sx4.2、Sy4.2から検出振幅値を決定し、検出振幅値を目標とする第2振幅A2に対応する所定の目標値と比較するように構成される。比較に基づいて、APCは、検出動振幅値とA2の目標値との間の差分を最小にする作動信号成分Sx5.2及びSy5.2を生成するように構成される。
APCは、また、駆動信号と吊下げ部材の検知信号との間の−90度の位相シフトを生じさせる。x方向の向きでは、これは、作動信号成分Sx5.2と信号Sx4.2との間、及び、作動信号成分Sx5.1と信号Sx4.1との間の−90度の位相シフトを意味する。それに対応して、y方向の向きでは、これは、作動信号成分Sy5.2と信号Sy4.2との間、及び、作動信号成分Sy5.1と信号Sy4.1との間の−90度の位相シフトを意味する。
次の位相では、各アクチュエーターについて、第1振動モードの、振幅制御され、かつ、位相シフトされた信号と、第2振動モードの、振幅制御され、かつ、位相シフトされた信号とが、デジタルアナログ変換のために合計される。図19の例を考慮すると、x方向における第1振動モードの作動信号成分Sx5.1と第2振動モードの作動信号成分Sx5.2とは、加算作動信号Sx6に合計される。同様の加算動作が信号Sy5.1及びSy5.2に対して行われ、y方向の加算作動信号Sy6が生成される。この点で、デジタル加算作動信号Sx6は、デジタルアナログ変換器DCAにおいて、P11及びP31の吊下げ部材を作動させるために2つのアナログ作動信号S17及びS37に変換されてもよく、デジタル加算作動信号Sy6は、P21及びP41の吊下げ部材を作動するために2つのアナログ作動信号S17及びS37に変換されてもよい。当該変換は、一定の利得で実行されてもよい。図16に示されるように、第1振動モード及び第2振動モードの、振幅制御され、かつ、適切に位相シフトされた成分を含む作動信号S17、S27、S37、S47は、それらを制御可能に作動電圧バッファーAVBに供給する作動電圧バッファーAVBにバッファーされてもよい。
図22は、図19のAPCにおける振幅位相制御のための例示的な実施形態を示す。図22に、入力Din1、Din3は、それぞれ、検知信号成分Sx4.1(第1振動モードのSy4.1)に対応する。それに対応して、出力Dout1、Dout3は、それぞれ、作動信号成分Sx5.1(第1振動モードのSy5.1)に対応する。入力Din2及びDin4は、それぞれ、第2振動モードの検知信号成分Sx4.2、Sy4.2に対応し、出力Dout2、Dout4は、それぞれ、作動信号成分Sx5.2(第2振動モードのSy5.2)に対応する。第1振動モードの第1振幅A1に対応する目標値は、targ1として示され、第2振動モードの第2振幅A2に対応する目標値は、targ2として示される。
図19の例は、4つの機能的なPID要素ADC1、ADC2、ADC3、ADC4を含む。1つ目のADC1は、第1振動モードの振幅A1の目標値targ1及び第1振動モードの検知信号成分Sx4.1を入力してもよい。次に1つ目のADC1は、Sx4.1の検出振幅値を決定し、それをtarg1と比較し、これらの2つの間の差分を最小にする利得制御値g1を出力する。この例では、差動検出の2つの方向の直交性は、x方向の向きで検知された信号を使用してy方向の向きで信号を生成することによって、作動信号の生成に利用されてもよい。
従って、図22に示されるように、Dout1から出力される、X方向の配向における第1振動モードの、振幅制御され、かつ、−90度位相シフトされた作動信号成分Sx5.1は、1つ目のADC1からの利得制御値g1を、Din3における直交検知信号成分Sy4.1と乗算し、乗算された信号を180度まで位相シフトすることによって生成されてもよい。Dout2から出力される、X方向の配向における第2振動モードの検知信号成分Sx5.2は、2つ目のADC2からの利得制御値g2を、Din4における直交検知信号成分Sy4.2を乗算し、乗算された信号を180度まで位相シフトすることによって生成されてもよい。Dout3から出力されるy方向の配向における第1振動モードの差動信号成分Sy5.1は、3つ目のADC3からの利得制御値g3を、Din1における直交検知信号成分Sx4.1と乗算することによって生成されてもよい。Dout4から出力されるy方向の配向における第2振動モードの作動信号成分Sy5.2は、4つ目のADC3からの利得制御値g4を、Din2における直交検知信号成分Sx4.2と乗算することによって生成されてもよい。
図23は、図19のAPCにおける振幅位相制御のための他の例示的な実施形態を示す。図23では、入力Din1、Din2、Din3、Din4、出力Dout1、Dout2、Dout3、Dout4、及び、目標値targ1、targ2内の信号は、図22を参照して説明したものに対応する。利得制御要素AGC1、AGC2、AGC3、AGC4も図22を参照して説明したように動作する。
この例では、差動検出の2つの方向の直交性は、作動信号の生成には利用されないが、必要な位相シフトは、90度位相シフト成分PS90 degを用いて実施される。従って、Dout1から出力される、x方向の配向における第1振動モードの、振幅制御され、かつ、−90度位相シフトされた作動信号成分Sx5.1は、1つ目のADC1からの利得制御値g1を、90度位相シフトさせた、Din1における検知信号成分Sx4.1と乗算し、乗算された信号を180度まで位相シフトすることによって生成されてもよい。Dout2から出力される、x方向の配向における第2振動モードの作動信号成分Sx5.2は、2つ目のADC2からの利得制御値g2を、90度位相シフトされた、Din2における検知信号成分Sx4を乗算し、乗算された信号を180度まで位相シフトすることによって生成されてもよい。Dout3から出力される、y方向の配向における第1振動モードの作動信号部品Sy5.1は、3つ目のADC3からの利得制御値g3を、90度位相シフトされた、Din3における検知信号成分を乗算することによって生成されてもよい。Dout4から出力される、y方向の配向における第2振動モードの作動信号成分Sy5.2は、4つ目のADC3からの利得制御値g4を、90度位相シフトされた、Din4における検知信号成分Sy4.2と乗算することによって生成されてもよい。
図24は、図19のAPCにおける振幅位相制御のための他の例示的な実施形態を示す。図24においても、入力Din1、Din2、Din3、Din4、出力Dout1、Dout2、Dout3、Dout4、及び、目標値targ1、targ2内の信号は、図22を参照して説明したものに対応する。利得制御要素AGC1、AGC2、AGC3、AGC4も、図22を参照して説明したように動作する。
この例は、図22及び23に適用された2つのオプションの組み合わせである。従って、図23に示されるように、Dout1から出力される、x方向の配向における第1振動モードの、振幅制御され−90度位相シフトされた作動信号成分Sx5.1は、1つめのADC1からの利得制御値g1を、90度位相シフトされた、Din1における検知信号成分Sx4.1と乗算し、乗算された信号を180度まで位相シフトすることによって生成されてもよい。Dout2から出力される、x方向の配向における第2振動モードの作動信号成分Sx5.2は、2つ目のADC2からの利得制御値g2を、90度位相シフトされた、Din2における検知信号成分4.2と乗算し、乗算された信号を180度まで位相シフトすることによって生成されてもよい。しかしながら、x方向の配向及びy方向配向の吊下げ部材とy方向配向の吊下げ部材との連続位置間の固有の位相差を使用して、Dout3から出力される、y方向の配向における第1振動モードの作動信号成分Sy5.1は、3つ目のADC3からの利得制御値g3を、Din1における直交検知信号成分Sx4.1と乗算することによって生成されてもよい。Dout4から出力される、y方向の配向における第2振動モードの作動信号成分Sy5.2は、4つ目のADC3からの利得制御値g4を、Din2における直交検知信号成分Sx4.2と乗算することによって生成されてもよい。
図25は、図19のAPCにおける振幅位相制御のための他の例示的な実施形態を示す。図25においても、入力Din1、Din2、Din3、Din4、出力Dout1、Dout2、Dout3、Dout4、目標値targ1、targ2内の信号は、図22を参照して説明したものに対応する。利得制御要素AGC1、AGC2、AGC3、AGC4も図22を参照して説明したように動作する。
図25の実施例は、図24の実施例と非常に類似しているが、精度を高めるために、作動信号の位相は、x方向の配向における信号とy方向の配向における信号との間の検出位相差に依存するように作成される。例えば、図25を考慮すると、Dout1におけるSx5.1の制御利得g1は、Din1におけるデジタル信号成分Sx4.1の振幅を、第1振動モードの目標値targ1と比較することによって、より早く決定され得ることが分かる。Din1における検知信号成分Sx4.1は、x方向の配向における第1振動モードの位相を表し、Din3における検知信号成分Sy4.1は、y方向の配向における第1振動モードの位相を表す。位相検出器PD1、PD2は、検知側からの2つの入力信号間の位相差を比較し、その比較に基づいて、x方向配向の信号とy方向配向の信号との間の90度位相差が正確に維持されるように駆動信号の生成に適用され得る位相制御信号を算出するフィードバック機構を提供する。従って、x方向配向及びy方向配向の検知信号成分は、位相検出器PD1、PD2に選択的に入力され得る。位相検出器PD1、PD2からの位相制御信号は、入力位相制御信号に従って、入力信号の位相を調整するように構成された可変遅延フィルタVDF1、VDF2、VDF3、VDF4に供給されてもよい。
より詳細には、図25において、Din1内の検知信号成分Sx4.1及びDin3内の検知信号成分Sy4.1は、2つの位相補正値v11、v12を出力する第1位相検出器PD1に入力される。PD1は、Din1内の入力信号成分Sx4.1とDin3内の入力信号成分Sy4.1との間の初期の90度位相差を維持することを目的とする第1位相補正値v11を決定するように構成される。Din1内の検知信号成分Sx4.1は、+90度の固有位相シフトを必要とする。そのため、PD1は、固有の位相シフトを実行する値v11を決定し、上述の目的を実現するための調整を提供する。PD1の第1位相補正値v11は、このようにVDF1に供給されてもよい。次いで、VDF1は、v11を使用して、Din1からの検知信号成分Sx4.1の位相を調整する。作動信号成分Sx5.1をDout1へ送信するために、結果として得られる位相調整信号は、ADC1からの利得制御値g1と乗算され、180度まで位相シフトされる。
また、PD1は、Din1内の入力信号成分Sx4.1とDin3内のSy4.1との間の初期の90度位相差を維持することを目的としているが、Din3内のデジタル信号成分Sy4.1に固定の追加の位相シフトを導入しない第2位相補正値v12も決定するように構成される。PD1の第2位相補正値v12は、このようにVDF3に供給されてもよい。次いで、VDF3は、v12を使用してDin1からの検知信号成分Sx4.1の位相を調節する。作動信号成分Sy5.1をDout3へ送信するために、結果として生じる位相調整信号は、ADC3からの利得制御値g3と乗算される。
それに対応して、第2振動モードでは、Din2内の検知信号成分Sx4.2及びDin4内の検知信号成分Sy4.1は、第2位相検出器PD2に入力されてもよい。PD2は、Din2内の入力信号成分Sx4.2とDin4内の入力信号成分Sy4.2との間の初期の90度位相差を維持することを目的とする第1位相補正値v21を決定するように構成される。Din2内の検知信号成分Sx4.2は、+90度の固有の位相シフトを必要とするので、PD2は、固有の位相シフトを実行する値v21を決定し、上述の目的を実現するための調整を提供する。したがって、PD2の第1位相補正値v21は、VDF2に供給されてもよい。次いで、VDF2は、v21を使用してDin2からの検知信号成分Sx4.2の位相を調節する。作動信号成分Sx5.2をDout2へ送るために、結果として生じる位相両性信号は、ADC2からの利得制御値g2と乗算され、180度まで位相シフトされる。
また、PD2は、Din2内の入力信号成分Sx4.2とDin4内のSy4.2との間の初期の90度位相差を維持することを目的としているが、Din5内のデジタル信号成分Sy4.2に固定の追加の位相シフトを導入しない第2位相補正値v22も決定するように構成される。PD2の第2位相補正値v22は、このようにVDF4に供給されてもよい。次いで、VDF4は、v22を使用してDin2からの検知信号成分Sx4.2の位相を調節する。作動信号成分Sy5.2をDout4へ送信するために、結果として生じる位相調整信号は、ADC4からの利得制御値g4と乗算される。
図22〜図25は、光学デバイスにおける振幅位相制御のための例示的なオプションの選択肢を示す。本明細書に基づいて、当業者は、保護の範囲内に含まれる更なる変形を容易に生成し得る。
設計方針としてよくあるのは、光学デバイスの利用可能な表面領域における反射面領域を最大化することである。これは、連成振動子を形成するために懸架されている1つ以上の慣性要素の質量が反射鏡の質量に対して無視できないほど大きくてはならないことを意味する。図5及び図8は、慣性要素の質量を最大にするために装置の外表面積が効果的に使用される設計を示す。光学MEMSデバイスは、薄い絶縁層によって分離された2つの導電層を含む層状固体構造体から製造されることが多い。そのような構造体の例には、シリコンオンインシュレーター(SOI)及びキャビティシリコンオンインシュレーター(キャビティSOI)ウェハが含まれる。SOIウェハは、典型的には、ハンドルウェハ層、埋め込み酸化物(BOX)層及びデバイス層を含む。ハンドルウェハ層は、通常最も厚い部分であり、数百ミクロンの厚さであり、デバイス層は、典型的には、数分の1ミクロンから数十ミクロンの厚さである。BOX層は、典型的には、数分の1ミクロンから数ミクロンの厚さである。慣性要素は、装置の動作において電気的な役割を一切持たない。これにより、光学デバイスの必要な表面積を増大させることなく、それらの質量を増加させることが可能になる。図26の側面図は、層状構造体のハンドル層の材料を使用して、垂直方向に層を介して反射鏡に連結された慣性質量を増大させる構成を示している。
図26の例は、層状ウェハ構造体の側面投影における連成振動子の構成要素を示す。層状構造体は、デバイス層260、ハンドル層261及びそれらの間の絶縁膜262を含む。層の中心には、反射鏡263がある。第1バネ構造体264は、慣性要素265を反射鏡に連結させ、第2バネ構造体266は、反射鏡、慣性要素及び第1バネ構造体を支持体に連結させる。層が水平方向に延びると考えられる場合、1以上、好ましくは全ての慣性要素が、デバイス層260から少なくとも部分的にハンドル層261まで垂直に延びる固体構造体を形成するように製造される。図26では、デバイス層内の要素は、図9及び図10の順で示されているが、この構成は、他の設計にも同様に適用可能である。例えば、図13の実施形態では、反射鏡によって囲まれた慣性要素は、層状構造体から作られてもよい。