<<< §1. 本発明の第1の実施の形態によるトルクセンサ >>>
以下に、添付の図面を参照して、本発明の第1の実施の形態によるトルクセンサについて詳細に説明する。
< 1−1. 基本構造部の構成 >
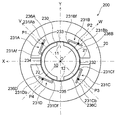
図1は、本発明の第1の実施の形態によるトルクセンサの基本構造部100を示す概略平面図である。また、図2は、従来のトルクセンサの基本構造部100aであり、図1との差異を説明するための参考図である。
図1及び図2では、XYZ三次元座標系が定められており、X軸が左右方向に、Y軸が上下方向に、Z軸(不図示)が奥行き方向に、それぞれ延びている。ここでは、X軸が左方から右方に向かって延びている点に注意を要する。更に、XY平面上に、原点Oを通り正のX軸に対して時計回りに45°をなすV軸と、原点Oを通り正のY軸に対して時計回りに45°をなすW軸と、がそれぞれ定められている。なお、このような座標軸は、他の図面においても同様に規定されている。また、本明細書では、正のトルクとは、右ねじをZ軸方向(手前側から奥側に向かう方向)に前進させるために当該右ねじを回転させる方向(図1及び図2における時計回りの方向)に作用するトルクを意味し、負のトルクとは、その逆の方向に作用するトルクを意味することとする。
図1に示すように、基本構造部100は、原点Oを中心としてXY平面上に固定された円盤状の固定体10と、固定体10を取り囲み、トルクの作用を受けることによって固定体10に対して相対回転する受力体20と、固定体10と受力体20との間隙において当該固定体10及び受力体20に接続され、受力体20から伝達されるトルクの作用によって弾性変形を生じる円環状の変形体30と、を有している。
図1に示すように、固定体10は、原点Oを中心とする円盤状の部材であり、受力体20及び変形体30は、原点を中心とする円環状の部材である。固定体10は、外周面のうちY軸と重なる2つの部位に、当該固定体10の径方向外方に突出した固定体接続部11、12を有している。更に、変形体30は、Y軸と重なる部位に固定部33、35を有しており、これらの固定部33、35と固定体接続部11、12とが互いに接続されている。更に、図1に示すように、受力体20は、内周面のうちX軸と重なる2つの部位に、当該受力体20の径方向内方に突出した受力体接続部21、22を有している。変形体30は、X軸と重なる部位に受力部32、34を有しており、これらの受力部32、34と受力体接続部21、22とが互いに接続されている。そして、変形体30のうち、正のY軸上に位置する固定部33と負のX軸上に位置する受力部34とを連結する変形部36に、トルクの作用による弾性変形が生じるようになっている。
もちろん、図1に示す基本構造部100では、変形体30のうち、周方向において隣接する固定部33、35と受力部32、34とを連結する全ての部位(第1象限〜第4象限に位置する部位)において、トルクの作用による弾性変形が生じる。ただし、ここでは、後述される梁構造体31が変形部36にのみ配置されていることから、当該変形部36に生じる弾性変形にのみ着目する。
なお、従来のトルクセンサ(図2参照)は、以上に説明した構造と同じ構成を有している。このため、図2において、図1と共通する構成部分には略同様の符号を付し、その詳細な説明は省略する。
本実施の形態による基本構造部100は、変形体30が梁構造体31を有している点で、従来の基本構造部(図2参照)とは異なっている。すなわち、基本構造部100は、図1に示すように、変形体30は、変形部36の外周面に接続された支持体31fと、この支持体31fによって一端が支持された梁31bと、を有する梁構造体31を備えている。梁31bには、当該梁31bの変位を計測するための計測点Pが規定されている。図1に示すように、計測点Pは、梁31bのうち支持体31fに接続されている側の端部とは反対側の端部の近傍に規定されている。より具体的には、支持体31fは、正のV軸と正のX軸とによって挟まれた領域において変形部36に接続されており、梁31bは、支持体31fの先端から、V軸を横切るように延び出ている。図1に示す例では、計測点Pは、梁31bとV軸とが重なる部位に、規定されている。
< 1−2. 基本構造部の作用 >
次に、上述した基本構造部100の作用について、図3及び図4を参照して説明する。
図3は、図1の基本構造部100の変形体30のうち第1象限に位置する部分を示す模式図である。図3(a)は、図1の基本構造部100の初期状態に対応する図であり、図3(b)は、図1の基本構造部100に負のトルクが作用したときに対応する図であり、図3(c)は、図1の基本構造部100に正のトルクが作用したときに対応する図である。また、図4は、図2の基本構造部100aの変形体30aのうち第1象限に位置する部分を示す模式図である。図4(a)は、図2の基本構造部100aの初期状態に対応する図であり、図4(b)は、図2の基本構造部100aに負のトルクが作用したときに対応する図であり、図4(c)は、図2の基本構造部100aに正のトルクが作用したときに対応する図である。図3及び図4において、各構成要素の厚みや幅は、無視してある。
図3(b)に示すように、図1の基本構造部100に負のトルクが作用すると、変形体30のうち正のX軸上に位置していた受力部34は、下方に移動される。一方、変形体30のうち正のY軸上に位置していた固定部33は、移動しない。このため、変形部36には引張力が作用し、これによって、変形部36は、曲率半径が大きくなるように弾性変形する。図3(b)において、実線は、弾性変形を生じている状態の変形体30を示しており、破線は、初期状態の変形部36(図3(a)参照)を示している。なお、このような図示については、図3及び図4の各図において共通である。
ここで、梁構造体31の支持体31fと変形部36との接続点Qにおける当該変形部36の接線に着目する。初期状態の接線は、図3(a)において符号Loで示されており、負のトルクが作用したときの当該接線は、図3(b)において符号Ltで示されている。
上述したように、変形体30に負のトルクが作用すると、変形部36は、固定部33が変位しないままで変形部36の曲率半径が大きくなるように弾性変形する。このため、接線Ltは、接線Loよりもより水平に寝た状態に変化する。
梁構造体31の支持体31fは、梁31b及び接線Lo、Ltと直交する関係にある。このため、梁31bと接線Lo、Ltとは常に平行な状態を維持している。このことを考慮すれば、変形体30に負のトルクが作用したときに梁31bの計測点Pに生じる変位は、接続点Qに生じる変位と接線Ltの傾きの変化に起因する変位とを合算した量となる。すなわち、梁構造体31によって、接続点Qに生じる変位が増幅されて、計測点Pに現れることになる。図3(b)において、計測点Pに生じる変位(初期位置Poから変位後の位置Ptまでの変位量)は、記号dtで示されている。実際のトルクセンサにおいて、トルクの作用によって点Qに生じる変位は数10〜数100μm程度であるため、図3(b)では、点PがV軸に沿って変位するものとして、図示してある。
次に、図3(c)に示すように、図1の基本構造部100に正のトルクが作用すると、変形体30のうち負のX軸上に位置していた受力部34は、上方に移動される。一方、変形体30のうち正のY軸上に位置していた固定部33は、移動しない。このため、変形部36には、作用するトルクの向きに沿って圧縮力が作用し、これによって、変形体30は、曲率半径が小さくなるように弾性変形する。
ここでも、梁構造体31の支持体31fと変形部36との接続点Qにおける当該変形部36の接線に着目する。接線は、図3(b)において符号Lcで示されている。上述したように、変形体30に正のトルクが作用すると、変形部36は、固定部33が変位しないままで変形部36の曲率半径が小さくなるように弾性変形するため、接線Lcは、初期状態の接線Lo(図3(a)参照)よりもより垂直に立った状態に変化する。
変形体30に正のトルクが作用したときに梁31bの計測点Pに生じる変位は、先の場合と同様に、接続点Qに生じる変位と接線Lcの傾きの変化に起因する変位とを合算した量となる。すなわち、梁構造体31によって、接続点Qに生じる変位が増幅されて、計測点Pに現れることになる。図3(c)において、計測点Pに生じる変位(初期位置Poから変位後の位置Pcまでの変位量)は、記号dcで示されている。ここでも、実際のトルクセンサにおいて生じる変位の大きさを考慮し、図3(c)では、点PがV軸に沿って変位するものとして、図示してある。
比較のため、従来のトルクセンサにおいて変形体30aに生じる弾性変形について、図4を参照して簡単に説明する。従来のトルクセンサに対して負のトルクが作用すると、図4(b)に示すように、変形部36aには、図3(b)に示す変形部36と同様の弾性変形が生じる。一方、従来のトルクセンサに対して正のトルクが作用すると、図4(c)に示すように変形部36aには、図3(c)に示す変形部36と同様の弾性変形が生じる。
変形部36aのうち、径方向の変位が最大の位置は、V軸と交差する位置である。このため、従来のトルクセンサでは、このV軸と交差する位置に計測点Rが規定され、この計測点RのV軸方向における変位に基づいて、作用したトルクが検出されていた。図4(b)では、計測点RのV軸方向における変位が符号dtaで示されており、図4(c)では、計測点RのV軸方向における変位が符号dcaで示されている。
次に、図5は、図1に示す本実施の形態による基本構造部100(モデル1)及び図2に示す従来の基本構造部100a(モデル2)に対してトルクが作用したときの所定部位に生じる変位をFEM解析(有限要素解析)した結果を纏めて示す図表である。所定部位とは、図1に示す基本構造部100においては、梁構造体31の梁31bに規定された計測点P、及び、変形部36が正のV軸と交差する部位に規定された参照点Rであり、図2に示す基本構造部100aにおいては、変形体30aが正のV軸と交差する位置に規定された計測点Raである。
図5では、本実施の形態による基本構造部100(モデル1)の参照点Rに生じるV軸方向の変位と、従来の基本構造部100a(モデル2)の計測点Raに生じるV軸方向の変位と、が共に同じ253μm(=dt2)であるように、各基本構造部100、100aに対してトルクを作用させている。このとき、本実施の形態による基本構造部100(モデル1)の計測点Pに生じるV軸方向の変位は、320μm(=dt1)となっている。このことから、本実施の形態による基本構造部(モデル1)は、従来の基本構造部100a(モデル2)と比較して、感度が1.26倍高まっていることが分かる。
基本構造部100(モデル1)は、変形部36に梁構造体31が設けられている影響により、当該変形体に発生する応力について、モデル1(190MPa)とモデル2(185MPa)とで異なっているが、これは大きな差ではない。また、図5は、本実施の形態による基本構造部100が従来の基本構造部100aよりも感度が相対的に優れていることを示すものであり、図中に示されている数値の絶対値に意味があるものではない。なお、変形部36に190MPaの応力が生じるような構造設計は、機械的信頼性に欠けるため、好ましいものではないことに注意が必要である。
このように、梁構造体31の存在によって、同じ大きさのトルクが作用した場合に、計測点Pに生じる変位は、参照点Rに生じる変位及び従来の基本構造部100の計測点Raに生じる変位よりも大きい。換言すれば、梁構造体31の存在によって、計測点Pにおいて、変形部36に生じる弾性変形が増幅されることになる。
< 1−3. 本実施の形態による基本構造部を採用したトルクセンサ >
次に、図6は、図1の基本構造部100を採用したトルクセンサ100cの一例を示す概略平面図である。
図6に示すように、トルクセンサ100cは、図1に示す基本構造部100と、基本構造部100の梁構造体31に配置された静電容量素子Cと、静電容量素子Cに接続され、変形体30の変形部36に生じる弾性変形に基づいて、作用したトルクを示す電気信号を出力する検出回路40と、を備えている。
図6に示すように、静電容量素子Cは、梁31bの計測点Pに受力体20に面するように配置された変位電極Emと、この変位電極Emに対向配置された固定電極Efと、によって構成されている。本実施の形態では、固定電極Efは、受力体20の内周面に設けられた台座23上に配置されている。台座23は、固定電極Efを変位電極Emと平行に所定の間隔で配置するためのものである。図6に示すように、台座23には、梁31bに面する領域に変位電極Emと平行な面が形成されているため、固定電極Efと変位電極Emとは、互いに平行に(極板間距離が一定であるように)配置されている。以上のような電極の配置によって、静電容量素子Cは、正のV軸上に形成されている。
検出回路40は、変形体30の弾性変形に起因して梁31bの計測点Pに生じる変位に基づいて、電作用したトルクを示す気信号を出力するようになっている。具体的には、検出回路40は、所定の電気配線(不図示)によって静電容量素子Cに接続されている。更に、検出回路40には、例えば、静電容量素子Cの静電容量値の変動量と作用したトルクの値とが対応付けられたテーブル(不図示)が格納されている。そして、検出回路40は、計測点Pの変位に起因して生じる静電容量素子Cの静電容量値の変動を検知すると、前記テーブルを参照してその変動量に対応するトルクを特定し、当該トルクを示す電気信号を出力するようになっている。
次に、以上のようなトルクセンサ100cを用いてトルクを計測する原理について説明する。
トルクセンサ100cの受力体20に負のトルク(図6における反時計回りのトルク)が作用すると、受力体20は、Z軸回りに、固定体10に対して反時計回りに回動する。このことによって、トルクセンサ100cの変形部36は、図3(b)に示すように弾性変形する。すなわち、梁31bの計測点PがV軸方向において径方向内方にdt1だけ変位する。前述したように、この変位dt1は、参照点Rの変位(図4(b)における計測点R0の変位に相当)よりも大きい。このような計測点Pの変位によって、静電容量素子Cを構成する変位電極Emが径方向内方に移動する。一方、固定電極Efは、受力体20の内周面に対して固定されていることから、径方向へは移動しない。以上から、トルクセンサ100cに負のトルクが作用すると、静電容量素子Cを構成する各電極Ef、Em間の離間距離が増大するため、静電容量値が減少する。
一方、トルクセンサ100cの受力体20に正のトルク(図6における時計回りのトルク)が作用すると、受力体20は、Z軸回りに、固定体10に対して時計回りに回動する。このことによって、トルクセンサ100cの変形部36は、図3(c)に示すように弾性変形する。すなわち、梁31bの計測点PがV軸方向において径方向外方にdc1だけ変位する。前述したように、この変位dc1は、参照点Rの変位(図4(c)における計測点R0の変位に相当)よりも大きい。このような計測点Pの変位によって、静電容量素子Cを構成する変位電極Emが径方向外方に移動する。このため、トルクセンサ100cに正のトルクが作用すると、静電容量素子Cを構成する各電極Ef、Em間の離間距離が減少するため、静電容量値が増大する。
そして、検出回路40は、これらの静電容量値の変動量を検知し、予め格納されたテーブルを参照して作用したトルクを特定する。そして、特定されたトルクに対応する電気信号が、所定の出力端子(不図示)から出力される。
以上のような本実施の形態によれば、梁構造体31の存在によって、計測点Pにおいて変形部36に生じる弾性変形が増幅されるため、高荷重のトルクに対応可能でありながら、高精度且つ高感度でトルクを検出可能なトルクセンサ100cを提供することができる。
変形体30の変形部36は、Z軸方向から見て、原点Oを取り囲む円環状の形状を有している。更に、変形体30の固定部33は、Z軸方向から見て、Y軸と重なるように位置付けられており、変形体30の受力部34は、Z軸方向から見て、X軸と重なるように位置付けられている。これらのことにより、変形部36において、より効果的に弾性変形が生じることになる。
また、梁31bの計測点Pは、正のX軸に対して45°をなすV軸上(固定部33と受力部34との中間位置)に位置付けられているため、変形部36に生じる弾性変形を、梁31bの計測点Pに生じる変位として効率的に検出することができる。
更には、検出回路40は、梁31bの計測点Pに配置された変位電極Emと、この変位電極Emに対向するように受力体20の内周面に配置された固定電極Efと、によって構成される静電容量素子Cを有しており、この静電容量素子Cの静電容量値の変動量に基づいて、作用したトルクを示す電気信号を出力するようになっている。このため、作用したトルクを容易に検出することができる。
<<< §2. 本発明の第2の実施の形態によるトルクセンサ >>>
次に、本発明の第2の実施の形態によるトルクセンサ200cについて説明する。
< 2−1. 基本構造部の構成 >
図7は、本発明の第2の実施の形態によるトルクセンサの基本構造部200を示す概略平面図である。
図7に示すように、基本構造部200は、梁構造体231A〜231Dが4つ設けられている点を除いて、図1に示す第1の実施の形態による基本構造部100と同じ構造を有している。本実施の形態では、変形体230は、Z軸方向から見て、第1象限〜第4象限のそれぞれに位置する部位に生じる弾性変形が利用される。このため、図7に示すように、変形体30のうち、正のY軸上に位置する固定部233と正のX軸上に位置する受力部234とを連結する第1象限の部分を第1変形部236Aとし、負のX軸上に位置する受力部232と正のY軸上に位置する固定部233とを連結する第2象限の部分を第2変形部236Bとし、負のY軸上に位置する固定部235と負のX軸上に位置する受力部232とを連結する第3象限の部分を第3変形部236Cとし、正のX軸上に位置する受力部234と負のY軸上に位置する固定部235とを連結する第4象限の部分を第4変形部236Dとして、以下の説明を行うこととする。なお、図7に示す基本構造部200において、第1の実施の形態による基本構造部100(図1参照)と共通する構成要素には同様の符号を付し、その詳細な説明は省略する。
本実施の形態による基本構造部200において、4つの梁構造体は、いずれも変形体230の外周面上に配置されている。具体的には、4つの梁構造体は、第1変形部236Aに配置された第1梁構造体231Aと、第2変形部236Bに配置された第2梁構造体231Bと、第3変形部236Cに配置された第3梁構造体231Cと、第4梁構造体231Dに配置された第4梁構造体231Dと、を有している。
第1梁構造体231Aは、第1の実施の形態による基本構造部100の梁構造体31と同じ構造で同じ位置に、配置されている。すなわち、第1梁構造体231Aは、第1変形部236Aの外周面に接続された第1支持体231Afと、この第1支持体231Afによって一端が支持された第1梁231Abと、を有している。第1梁231Abには、Z軸方向から見て正のV軸と重なる位置に、当該第1梁231Abの変位を計測するための第1計測点P1が規定されている。
残りの第2〜第4梁構造体231B〜231Dは、第1梁構造体231Aと同じ構造を有しており、配置されている位置のみが異なっている。すなわち、第2梁構造体231Bは、第1梁構造体231Aを時計回りに90°回転させた位置に配置されており、第1変形部236Bの外周面に接続された第2支持体231Bfと、この第2支持体231Bfによって一端が支持された第2梁231Bbと、を有している。第2梁231Bbには、Z軸方向から見て正のW軸と重なる位置に、当該第2梁231Bbの変位を計測するための第2計測点P2が規定されている。
第3梁構造体231Cは、第2梁構造体231Bを時計回りに90°回転させた位置に配置されており、第3変形部236Cの外周面に接続された第3支持体231Cfと、この第3支持体231Cfによって一端が支持された第3梁231Cbと、を有している。第3梁231Cbには、Z軸方向から見て負のV軸と重なる位置に、当該第3梁231Cbの変位を計測するための第3計測点P3が規定されている。
第4梁構造体231Dは、第3梁構造体231Cを時計回りに90°回転させた位置に配置されており、第4変形部236Dの外周面に接続された第4支持体231Dfと、この第4支持体231Dfによって一端が支持された第4梁231Dbと、を有している。第4梁231Dbには、Z軸方向から見て負のW軸と重なる位置に、当該第4梁231Dbの変位を計測するための第4計測点P4が規定されている。
< 2−2. 基本構造部の作用 >
次に、上述した基本構造部200の作用について、図8及び図9を参照して説明する。
図8は、図7の基本構造部200に負のトルクT−が作用したときの変形体230を示す模式図であり、図9は、図7の基本構造部200に正のトルクT+が作用したときの変形体230を示す模式図である。図8及び図9において、各構成要素の厚みや幅は、無視してある。
基本構造部200の受力体20に負のトルクT−が作用すると、当該トルクT−は、受力体接続部21、22を介して、受力部232、234に伝達される。この結果、図8に示すように、受力部232、234は、共に反時計回りに変位する。このことにより、第1及び第3変形部236A、236Cには引張力が作用するため、各変形部236A、236Cは、曲率半径が大きくなるように弾性変形する。一方、受力部232、234の変位に伴って、第2及び第4変形部236B、236Dには圧縮力が作用するため、各変形部236B、236Dは、曲率半径が小さくなるように弾性変形する。
以上のような変形体230の弾性変形によって、図8に示すように、第1梁構造体231Aの計測点P1及び第3梁構造体231Cの計測点P3は、共に変形体230の径方向内方に変位する。一方、第2梁構造体231Bの計測点P2及び第4梁構造体231Dの計測点P4は、共に変形体230の径方向外方に変位する。各計測点P1〜P4に生じる変位の大きさは、各変形部236A〜236Dに生じる径方向(V軸方向またはW軸方向)の変位の大きさよりも、大きい(変形体230に生じる変位が増幅される)。
各変形部236A〜236Dに生じる径方向の変位が増幅されて各計測点P1〜P4に現れる原理については、上記1−2.に記載した説明によって理解され得る。というのは、図8の第1変形部236A及び第1梁構造体231Aは、図3(b)に示す変形部36及び梁構造体31と同一であり、第2梁構造体231Bは、図3(c)をY軸に関して対称移動させた上で梁構造体31をW軸に関して対称移動させた構造であり、第4梁構造体231Dは、図3(c)をX軸に関して対称移動させた上で梁構造体31をW軸に関して対称移動させた構造であり、第3梁構造体231Cは、図3(b)を原点回りに180°回転移動した構造となっているからである。
次に、基本構造部200の受力体20に正のトルクT+が作用すると、図9に示すように、受力部232、234は、共に時計回りに変位する。このことにより、第1及び第3変形部236A、236Cには圧縮力が作用するため、各変形部236A、236Cは、曲率半径が小さくなるように弾性変形する。一方、受力部232、234の変位に伴って、第2及び第4変形部236B、236Dには引張力が作用するため、各変形部236B、236Dは、曲率半径が大きくなるように弾性変形する。
以上のような変形体230の弾性変形によって、図9に示すように、第1梁構造体231Aの計測点P1及び第3梁構造体231Cの計測点P3は、共に変形体30の径方向外方に変位する。一方、第2梁構造体231Bの計測点P2及び第4梁構造体231Dの計測点P4は、共に変形体230の径方向内方に変位する。各計測点P1〜P4に現れる変位の大きさは、各変形部236A〜236Dに生じる径方向(V軸方向またはW軸方向)の変位の大きさよりも、大きい(増幅される)。
この場合も、各変形部236A〜236Dに生じる径方向の変位が増幅されて各計測点P1〜P4に生じる原理については、上記1−2.に記載した説明によって理解され得る。というのは、図9の変形体230は、図8の変形体230をX軸に関して対称移動(反転)させ、各梁構造体231A〜231DをV軸またはW軸に関して対称移動させた構造と同じだからである。
< 2−3. 本実施の形態による基本構造部を採用したトルクセンサ >
次に、図10は、図7の基本構造部200を採用したトルクセンサ200cの一例を示す概略平面図である。
図10に示すように、トルクセンサ200cは、図7に示す基本構造部200と、基本構造部200の各梁構造体231A〜231Dの梁231Ab〜231Dbに1つずつ配置された4つの静電容量素子C1〜C4と、これらの静電容量素子C1〜C4に接続され、変形体230の各変形部236A〜236Dに生じる弾性変形に基づいて、作用したトルクを示す電気信号を出力する検出回路240と、を備えている。
図10に示すように、4つの静電容量素子とは、第1梁構造体231Aに配置された第1静電容量素子C1と、第2梁構造体231Bに配置された第2静電容量素子C2と、第3梁構造体231Cに配置された第3静電容量素子C3と、第4梁構造体231Dに配置された第4静電容量素子C4と、である。
第1静電容量素子C1は、第1梁231Abの第1計測点P1に受力体20に面するように配置された第1変位電極Em1と、この第1変位電極Em1に対向配置された第1固定電極Ef1と、によって構成されている。同様に、第2静電容量素子C2は、第2梁231Bbの第2計測点P2に受力体20に面するように配置された第2変位電極Em2と、この第2変位電極Em2に対向配置された第2固定電極Ef2と、によって構成されている。第3静電容量素子C3は、第3梁231Cbの第3計測点P3に受力体20に面するように配置された第3変位電極Em3と、この第3変位電極Em3に対向配置された第3固定電極Ef3と、によって構成されている。第4静電容量素子C4は、第4梁231Dbの第4計測点P4に受力体20に面するように配置された第4変位電極Em4と、この第4変位電極Em4に対向配置された第4固定電極Ef4と、によって構成されている。
なお、第1〜第4静電容量素子C1〜C4は、各静電容量素子C1〜C4を構成する電極の実効対向面積が全て同一であり、電極間の離間距離も全て等しく構成されている。
図10に示すように、第1固定電極Ef1は、受力体20の内周面に設けられた第1台座23A上に配置されており、第2固定電極Ef2は、受力体20の内周面に設けられた第2台座23B上に配置されており、第3固定電極Ef3は、受力体20の内周面に設けられた第3台座23C上に配置されており、第4固定電極Ef4は、受力体20の内周面に設けられた第4台座23D上に配置されている。各台座23A〜23Dには、梁231Ab〜231Dbに面する領域に各変位電極Em1〜Em4と平行な面が形成されているため、各固定電極Ef1〜Ef4と対応する変位電極Em1〜Em4とは、互いに平行に(極板間距離が一定であるように)配置されている。以上のような電極の配置によって、第1静電容量素子C1は、正のV軸上に形成されており、第2静電容量素子C2は正のW軸上に形成されており、第3静電容量素子C3は、負のV軸上に形成されており、第4静電容量素子C4は、負のW軸上に形成されている。
検出回路240は、所定の電気配線(不図示)によって第1〜第4静電容量素子C1〜C4に接続されており、変形体230の弾性変形に起因して第1〜第4梁231Ab〜231Dbの各計測点P1〜P4に生じる変位に基づいて、作用したトルクを示す電気信号を出力するようになっている。第1の実施の形態と同様に、検出回路240には、例えば、第1〜第4静電容量素子C1〜C4の静電容量値の各変動量を用いて所定の演算を行うことによって得られる値と作用したトルクの値とが対応付けられたテーブル(不図示)が格納されている。検出回路240は、静電容量素子Cの静電容量値の変動を検知すると、このテーブルを参照することによって、作用したトルクを特定するようになっている。トルクの具体的な測定の詳細については、後述される。
次に、以上のようなトルクセンサ200cを用いてトルクを計測する原理について説明する。
トルクセンサ200cの受力体20に負のトルク(図10における反時計回りのトルク)が作用すると、受力体20は、Z軸回りに、固定体10に対して反時計回りに回動する。このことによって、トルクセンサ200cの第1〜第4変形部236A〜236Dは、図8に示すように弾性変形する。このことによって、第1静電容量素子C1及び第3静電容量素子C3においては、各静電容量素子C1、C3を構成する電極間の離間距離が増大するため、静電容量値は減少する。一方、第2静電容量素子C2及び第4静電容量素子C4においては、各静電容量素子C2、C4を構成する電極間の離間距離が減少するため、静電容量値は増大する。
一方、トルクセンサ200cの受力体20に正のトルク(図10における時計回りのトルク)が作用すると、受力体20は、Z軸回りに、固定体10に対して時計回りに回動する。このことによって、トルクセンサ200cの第1〜第4変形部236A〜236Dは、図9に示すように弾性変形する。このことによって、第1静電容量素子C1及び第3静電容量素子C3においては、各静電容量素子C1、C3を構成する電極間の離間距離が減少するため、静電容量値は増大する。一方、第2静電容量素子C2及び第4静電容量素子C4においては、各静電容量素子C2、C4を構成する電極間の離間距離が増大するため、静電容量値は減少する。結局、受力体20に作用するトルクの向きが逆転すると、第1〜第4静電容量素子C1〜C4の静電容量値の変動(増大か減少か)も逆になる。
本実施の形態では、前述したように、第1〜第4梁構造体231A〜231Dの存在によって、各計測点P1〜P4に生じる変位は、各変形部236A〜236Dに生じる変位よりも大きい。このため、静電容量素子が各変形部236A〜236Dに直接配置されている従来のトルクセンサと比較して、各静電容量素子C1〜C4の静電容量値の変動量は、大きい。
以上のような静電容量素子C1〜C4の静電容量値の変動に鑑み、検出回路240は、次の[式1]を用いてトルクセンサ200cに作用したZ軸回りのトルクTを算出する。[式1]において、C1〜C4は、第1〜第4静電容量素子C1〜C4の静電容量値の変動量を示している。
[式1]
T=C1−C2+C3−C4
そして、検出回路240は、予め格納されたテーブルを参照して、[式1]に基づいて得られる値から、作用したトルクを特定する。そして、特定されたトルクに対応する電気信号が、所定の出力端子(不図示)から出力される。
以上のような本実施の形態によれば、4つの梁構造体231A〜231Dの存在によって、変形体230の変形部236A〜236Dに生じる弾性変形が各計測点P1〜P4において増幅される。このため、高荷重のトルクに対応可能でありながら、高精度且つ高感度でトルクを検出可能なトルクセンサ200cを提供することができる。
本実施の形態においても、2つの固定部233、235は、Z軸方向から見て、変形体230とX軸とが重なる部位にY軸対称に位置付けられ、2つの受力部232、234は、Z軸方向から見て、変形体230とY軸とが重なる部位にX軸対称に位置付けられている。更には、各計測点P1〜P4は、正のW軸上、正のV軸上、負のW軸上及び負のV軸上に1つずつ位置付けられている。これらのことによって、第1〜第4変形部236A〜236Dに生じる弾性変形を、第1〜第4梁231Ab〜231Dbの各計測点P1〜P4に生じる変位として効率的に検出することができる。
また、本実施の形態の検出回路240は、第1〜第4梁231Ab〜231Dbの各計測点P1〜P4に1つずつ配置された4つの変位電極Em1〜Em4と、これらの変位電極Em1〜Em4に対向配置された固定電極Ef1〜Ef4と、によって構成された4組の静電容量素子C1〜C4を有している。そして、検出回路240は、前述した[式1]に基づいて、作用したトルクを示す電気信号を出力するようになっている。このため、作用したトルクを容易に検出することができると共に、Z軸まわりのトルク以外の力(X,Y,Zの各軸方向の力やX軸、Y軸回りのトルク)による影響や、使用環境の温度変化による影響を受けることなく、Z軸回りのトルクのみを検出することができる。
<<< §3. 本発明の第3の実施の形態によるトルクセンサ >>>
次に、本発明の第3の実施の形態によるトルクセンサ300cについて説明する。
< 3−1. 基本構造部の構成 >
図11は、本発明の第3の実施の形態によるトルクセンサの基本構造部300を示す概略平面図である。
図11に示すように、基本構造部300は、4つの梁構造体331E〜331Hが変形体330の内周面にも設けられている点を除いて、図7に示す第2の実施の形態による基本構造部200と同じ構造を有している。このため、図11に示す基本構造部200において、第2の実施の形態による基本構造部200(図1参照)と共通する構成要素には同様の符号を付し、その詳細な説明は省略する。
但し、説明の便宜上、変形体330の外周面に配置された、第2の実施の形態と共通の梁構造体を次のように置き換えることとする。すなわち、XY平面の第1象限に配置された梁構造体を第1外側梁構造体331Aとし、XY平面の第2象限に配置された梁構造体を第2外側梁構造体331Bとし、XY平面の第3象限に配置された梁構造体を第3外側梁構造体331Cとし、XY平面の第4象限に配置された梁構造体を第4外側梁構造体331Dとする。
本実施の形態による基本構造部300は、変形体330の内周面に、変形体330の第1変形部336Aに配置された第1内側梁構造体331E、第2変形部336Bに配置された第2内側梁構造体331F、第3変形部336Cに配置された第3内側梁構造体331G、及び、第4変形部336Dに配置された第4内側梁構造体331H、の4つの梁構造体を追加的に有している。
図11に示すように、第1内側梁構造体331Eは、第1変形部336Aの内周面に接続された第1内側支持体331Efと、この第1内側支持体331Efによって一端が支持された第1内側梁331Ebと、を有している。第1内側梁331Ebは、第1外側梁構造体331Aの梁331Abと平行に延在している。更に、第1内側梁331Ebには、Z軸方向から見て正のV軸と重なる位置に、当該第1内側梁331Ebの変位を計測するための計測点P21が規定されている。
また、図11に示すように、第1内側支持体331Efと変形体330との接続部位は、当該変形体330の周方向において、第1外側梁構造体331Aの第1外側支持体331Afと変形体330との接続部位と同じである。図11に示すように、同様のことが、第2〜第4内側梁構造体331F〜331Hと、その各々に対応する第2〜第4外側梁構造体331B〜331Dと、の間においても、成り立っている。
第2内側梁構造体331Fは、第2変形部336Bの内周面に接続された第2内側支持体331Ffと、この第2内側支持体331Ffによって一端が支持された第2内側梁331Fbと、を有している。第2内側支持体331Ffと変形体330との接続部位は、当該変形体330の周方向において、第2外側梁構造体331Bの第2内側支持体331Bfと変形体330との接続部位と同じである。第2内側梁331Fbは、第2外側梁構造体331Bの梁331Bbと平行に延在している。更に、第2内側梁331Fbには、Z軸方向から見て正のW軸と重なる位置に、当該第2内側梁331Fbの変位を計測するための計測点P22が規定されている。
第3内側梁構造体331Gは、第3変形部336Cの内周面に接続された第3内側支持体331Gfと、この第3内側支持体331Gfによって一端が支持された第3内側梁331Gbと、を有している。第3内側支持体331Gfと変形体330との接続部位は、当該変形体330の周方向において、第3外側梁構造体331Cの第3内側支持体331Cfと変形体330との接続部位と同じである。第3内側梁331Gbは、第3外側梁構造体331Cの梁331Cbと平行に延在している。更に、第3内側梁331Gbには、Z軸方向から見て負のV軸と重なる位置に、当該第3内側梁331Gbの変位を計測するための計測点P23が規定されている。
更に、第4内側梁構造体331Hは、第4変形部336Dの内周面に接続された第4内側支持体331Hfと、この第4内側支持体331Hfによって一端が支持された第4内側梁331Hbと、を有している。第4内側支持体331Hfと変形体330との接続部位は、当該変形体330の周方向において、第4外側梁構造体331Dの第4内側支持体331Dfと変形体330との接続部位と同じである。第4内側梁331Hbは、第4外側梁構造体331Dの梁331Dbと平行に延在している。更に、第4内側梁331Hbには、Z軸方向から見て負のW軸と重なる位置に、当該第4内側梁331Hbの変位を計測するための計測点P24が規定されている。
本実施の形態では、第1〜第4内側梁構造体331E〜331Hは、互いに同じ構造を有しており、取り付け位置のみが異なっている。
結局、図11に示す例では、第1〜第4外側梁構造体331A〜331Dと対応する変形部336A〜336Dとの接続部位と、第1〜第4内側梁構造体331E〜331Hと対応する変形部336E〜336Hとの接続部位と、が変形体330の周方向において同じ位置に配置されている。更に、図11に示す例では、第1〜第4外側梁331Ab〜331Dbと対応する第1〜第4内側梁331EAb〜331Hbとが互いに平行となっている。
もちろん、このような形態には限定されず、他の実施の形態では、第1〜第4内側梁構造体331E〜331Hと対応する変形部336E〜336Hとの接続部位と、が変形体330の周方向において異なる位置に配置されていても良い。また、第1〜第4外側梁331Ab〜331Dbと対応する第1〜第4内側梁331EAb〜331Hbとが互いに非平行となっていても良い。
< 3−2. 基本構造部の作用 >
次に、上述した基本構造部300の作用について、図12及び図13を参照して説明する。
図12は、図11の基本構造部300に対して負のトルクT−が作用したときの変形体330を示す模式図であり、図13は、図11の基本構造部300に対して正のトルクT+が作用したときの変形体330を示す模式図である。図12及び図13において、各構成要素の厚みや幅は、無視してある。
基本構造部300の受力体20に負のトルクT−が作用すると、変形体330は、図8に示す第2の実施の形態による基本構造部200と同様に弾性変形する。前述したように、変形体330の外周面に配置されている第1〜第4外側梁構造体331A〜331Dは、図8に示す第1〜第4梁構造体231A〜231Dと同一である。このため、第1〜第4外側梁構造体331A〜331Dは、変形体330の弾性変形によって、当該第1〜第4梁構造体231A〜231Dと同じ挙動を示す。すなわち、図12に示すように、第1及び第3外側梁構造体331A、331Cの各計測点P11、P13は、共に、実質的にV軸に沿って、変形体330の径方向内方に変位する。一方、第2及び第4外側梁構造体331B、331Dの各計測点P12、P14は、共に、実質的にW軸に沿って、変形体330の径方向外方に変位する。
次に、第1〜第4内側梁構造体331E〜331Hが示す挙動については、次の通りである。まず、第1内側梁構造体331Eは、前述したように、第1内側梁331Ebと第1外側梁構造体331Aの第1梁331Abとが互いに平行であるように構成されている。このことから、第1内側梁331Eの計測点P21は、第1梁331Abの計測点P11と同様に、実質的にV軸に沿って、変形体330の径方向内方に変位する。更に、第2〜第4内側梁構造体331F〜331Hは、各内側梁331Fb〜331Hbが、対応する外側梁構造体331B〜331Dの梁331Bb〜331Dbと互いに平行であるように構成されている。これらのことから、第2〜第4内側梁331F〜331Hの各計測点P22〜P24は、対応する外側梁構造体331B〜331Dの各計測点P12〜P14と同じ方向に変位する。すなわち、第2及び第4内側梁331Fb、331Hbの各計測点P22、P24は、W軸に沿って変形体330の径方向外側に変位し、第3内側梁331Gbの計測点P23は、V軸に沿って径方向内側に変位する。
第1〜第4内側梁331Eb〜331Hbの各計測点P21〜P24に生じる変位の大きさは、各変形部336A〜336Dに生じる径方向(V軸方向またはW軸方向)の変位の大きさよりも、大きい(変形体330に生じる変位が増幅される)。これは、第1〜第4外側梁331Ab〜331Dbの各計測点P11〜P14に生じる変位の大きさが、各変形部336A〜336Dに生じる径方向(V軸方向またはW軸方向)の変位の大きさよりも大きいことと、同じ理由による。というのは、各内側梁構造体331E〜331Hは、当該外側梁構造体331A〜331Dを、変形体330との接続点Q1〜Q4(図8参照)における接線に関して反転させた構造を有しているからである。但し、各内側梁331Eb〜331Hbの長さは、対応する外側梁構造体331A〜331Dの梁331Ab〜331Dbの長さと必ずしも一致している必要は無い。
次に、基本構造部300の受力体20に正のトルクT+が作用すると、図13に示すように、受力部332、334は、共に時計回りに変位する。このことにより、変形体330は、図9に示す第2の実施の形態による基本構造部200と同様に弾性変形する。変形体330の外周面に配置されている第1〜第4外側梁構造体331A〜331Dは、図9に示す第1〜第4梁構造体231A〜231Dと同一であるから、変形体330の弾性変形によって、当該第1〜第4梁構造体231A〜231Dと同じ挙動を示す。すなわち、図13に示すように、第1及び第3外側梁構造体331A、331Cの各計測点P11、P13は、共に、実質的にW軸に沿って、変形体330の径方向外側に変位する。一方、第2及び第4外側梁構造体331B、331Dの各計測点P12、P14は、共に、実質的にV軸に沿って、変形体330の径方向内側に変位する。この場合も、各計測点P21〜P24に生じる変位の大きさは、各変形部336A〜336Dに生じる径方向(V軸方向またはW軸方向)の変位の大きさよりも、大きい(変形体330に生じる変位が増幅される)。
< 3−3. 本実施の形態による基本構造部を採用したトルクセンサ >
次に、図14は、図11の基本構造部300を採用したトルクセンサ300cの一例を示す概略平面図である。
図14に示すように、トルクセンサ300cは、図11に示す基本構造部300と、基本構造部300の8つの梁構造体331A〜331Hの各梁331Ab〜331Hbに1つずつ配置された8つの静電容量素子C11〜C24と、これらの静電容量素子C11〜C24に接続され、変形体330の各変形部336A〜336Dに生じる弾性変形に基づいて、作用したトルクを示す電気信号を出力する検出回路340と、を備えている。
図14に示すように、8つの静電容量素子とは、第1外側梁構造体331Aに配置された第1外側静電容量素子C11と、第2外側梁構造体331Bに配置された第2外側静電容量素子C12と、第3外側梁構造体331Cに配置された第3外側静電容量素子C13と、第4梁構造体331Dに配置された第4外側静電容量素子C14と、第1内側梁構造体331Eに配置された第1内側静電容量素子C21と、第2内側梁構造体331Fに配置された第2内側静電容量素子C22と、第3内側梁構造体331Gに配置された第3内側静電容量素子C23と、第4内側梁構造体331Hに配置された第4内側静電容量素子C24と、である。
これら8つの静電容量素子のうち、変形体330の外側に配置された第1〜第4外側静電容量素子C11〜C14は、第2の実施の形態によるトルクセンサ200cに配置された第1〜第4静電容量素子C1〜C4と同じ構成である。但し、説明の便宜上、第1〜第4外側静電容量素子C11〜C14を構成する各電極について、変位電極を外側変位電極Em11〜Em14と呼び、固定電極を外側固定電極Ef11〜Ef14と呼ぶこととする。
変形体330の内側に配置された第1〜第4内側静電容量素子C21〜C24について、第1内側静電容量素子C21は、第1内側梁331Ebの計測点P21に固定体10に面するように配置された第1内側変位電極Em21と、この第1内側変位電極Em21に対向配置された第1内側固定電極Ef21と、によって構成されている。同様に、第2内側静電容量素子C22は、第2内側梁331Fbの計測点P22に固定体10に面するように配置された第2内側変位電極Em22と、この第2内側変位電極Em22に対向配置された第2内側固定電極Ef22と、によって構成されている。第3内側静電容量素子C23は、第3内側梁331Gbの計測点P23に固定体10に面するように配置された第3内側変位電極Em23と、この第3内側変位電極Em23に対向配置された第3内側固定電極Ef23と、によって構成されている。第4内側静電容量素子C24は、第4内側梁331Hbの計測点P24に固定体10に面するように配置された第4内側変位電極Em24と、この第4内側変位電極Em24に対向配置された第4内側固定電極Ef24と、によって構成されている。
なお、第2の実施の形態によるトルクセンサ200cと同様に、第1〜第4外側静電容量素子C11〜C14は、各外側静電容量素子C11〜C14を構成する電極の実効対向面積が全て同一であり、電極間の離間距離も全て等しく構成されている。更に、第1〜第4内側静電容量素子C21〜C24は、各内側静電容量素子C21〜C24を構成する電極の実効対向面積が全て同一であり、電極間の離間距離も全て等しく構成されている。
図14に示すように、第1外側固定電極Ef11は、受力体20の内周面に設けられた第1台座23A上に配置されており、第2外側固定電極Ef12は、受力体20の内周面に設けられた第2台座23B上に配置されており、第3外側固定電極Ef13は、受力体20の内周面に設けられた第3台座23C上に配置されており、第4外側固定電極Ef14は、受力体20の内周面に設けられた第4台座23D上に配置されている。図14に示すように、各台座23A〜23Dには、外側梁231Ab〜231Dbに面する領域に各外側変位電極Em11〜Em14と平行な面が形成されていることにより、各外側固定電極Ef11〜Ef14と対応する外側変位電極Em11〜Em14とは、互いに平行に(極板間距離が一定であるように)配置されている。以上のような電極の配置によって、第1外側静電容量素子C11は、正のV軸上に形成されており、第2外側静電容量素子C12は正のW軸上に形成されており、第3外側静電容量素子C13は、負のV軸上に形成されており、第4外側静電容量素子C14は、負のW軸上に形成されている。
更に、第1内側固定電極Ef21は、固定体10の外周面に設けられた第1内側台座13A上に配置されており、第2内側固定電極Ef22は、固定体10の外周面に設けられた第2内側台座13B上に配置されており、第3内側固定電極Ef23は、固定体10の外周面に設けられた第3内側台座13C上に配置されており、第4内側固定電極Ef24は、固定体10の外周面に設けられた第4内側台座14C上に配置されている。図14に示すように、各内側台座13A〜13Dには、内側梁331Eb〜331Hbに面する領域に各内側変位電極Em21〜Em24と平行な面が形成されていることにより、各内側固定電極Ef21〜Ef24と対応する内側変位電極Em21〜Em24とは、互いに平行に(極板間距離が一定であるように)配置されている。以上のような電極の配置によって、第1内側静電容量素子C21は、正のV軸上に形成されており、第2内側静電容量素子C22は正のW軸上に形成されており、第3内側静電容量素子C23は、負のV軸上に形成されており、第4内側静電容量素子C24は、負のW軸上に形成されている。
検出回路340は、所定の電気配線(不図示)によって第1〜第4外側静電容量素子C11〜C14及び第1〜第4内側静電容量素子C21〜C24に接続されている。そして、当該検出回路340は、変形体330の弾性変形に起因して、第1〜第4外側梁331Ab〜331Dbの各計測点P11〜P14に生じる変位、及び、第1〜第4内側梁331Eb〜331Hbの各計測点P21〜P24に生じる変位、の少なくとも一方、に基づいて、作用したトルクを示す電気信号を出力するようになっている。検出回路340には、例えば、第1〜第4外側静電容量素子C11〜C14の静電容量値の各変動量を用いて、後述される所定の演算を行うことによって得られる値と、作用したトルクの値と、が対応付けられたテーブル(不図示)、及び、第1〜第4内側静電容量素子C21〜C24の静電容量値の各変動量を用いて、後述される所定の演算を行うことによって得られる値と、作用したトルクの値と、が対応付けられたテーブル(不図示)が格納されている。検出回路340は、各静電容量素子C11〜C24の静電容量値の変動量を検知すると、このテーブルを参照することによって、作用したトルクを特定するようになっている。
次に、以上のようなトルクセンサ300cを用いてトルクを計測する原理について説明する。
トルクセンサ300cの受力体20に負のトルク(図14における反時計回りのトルク)が作用すると、受力体20は、Z軸回りに、固定体10に対して反時計回りに回動する。このことによって、トルクセンサ300cの第1〜第4変形部336A〜336Dは、図12に示すように弾性変形する。このことによって、第1外側静電容量素子C11、第3外側静電容量素子C13、第2内側静電容量素子C22及び第4内側静電容量素子C24においては、各静電容量素子C11、C13、C22、C24を構成する電極間の離間距離が増大するため、静電容量値は減少する。一方、第2外側静電容量素子C12、第4外側静電容量素子C14、第1内側静電容量素子C21及び第3内側静電容量素子C23においては、各静電容量素子C12、C14、C21、C23を構成する電極間の離間距離が減少するため、静電容量値は増大する。
一方、トルクセンサ300cの受力体20に正のトルク(図14における時計回りのトルク)が作用すると、受力体20は、Z軸回りに、固定体10に対して時計回りに回動する。このことによって、トルクセンサ300cの第1〜第4変形部336A〜336Dは、図13に示すように弾性変形する。このことによって、第1外側静電容量素子C11、第3外側静電容量素子C13、第2内側静電容量素子C22及び第4内側静電容量素子C24においては、各静電容量素子C11、C13、C22、C24を構成する電極間の離間距離が減少するため、静電容量値は増大する。一方、第2外側静電容量素子C12、第4外側静電容量素子C14、第1内側静電容量素子C21及び第3内側静電容量素子C23においては、各静電容量素子C12、C14、C21、C23を構成する電極間の離間距離が増大するため、静電容量値は減少する。結局、受力体20に作用するトルクの向きが逆転すると、各静電容量素子C11〜C24の静電容量値の変動(増大か減少か)も逆になる。
本実施の形態では、前述したように、梁構造体331A〜331Hの存在によって、各計測点P11〜P24に生じる変位は、各変形部336A〜336Dに生じる変位よりも大きい。このため、静電容量素子が各変形部336A〜336Dに直接配置されている従来のトルクセンサと比較して、各静電容量素子C11〜C24の静電容量値の変動量は、大きい。
以上のような静電容量素子C11〜C24の静電容量値の変動に鑑み、検出回路340は、次の[式2]に示すT1またはT2のいずれかを用いて、トルクセンサ200cに作用したZ軸回りのトルクTを算出する。T1は、外側静電容量素子C11〜C14を用いて作用したトルクTを計測するための式であり、T2は、内側静電容量素子C21〜C24を用いて作用したトルクを計測するための式である。また、[式2]において、C11〜C24は、第1〜第4外側静電容量素子C11〜C14及び第1〜第4内側静電容量素子C21〜C24の静電容量値の変動量を示している。
[式2]
T1=C11−C12+C13−C14
T2=C21−C22+C23−C24
あるいは、[式2]に代えて、次の[式3]を用いて作用したトルクを計測することも可能である。この[式3]は、[式2]に示すT1とT2との和である。
[式3]
T3=(C11+C21)−(C12+C22)+(C13+C13)−(C14+C24)
そして、検出回路340は、予め格納されたテーブルを参照して、[式2]または[式3]に基づいて得られる値から、作用したトルクを特定する。そして、特定されたトルクに対応する電気信号が、所定の出力端子(不図示)から出力される。
更に、本実施の形態によるトルクセンサ300cは、次のようにして、当該トルクセンサ300cが正常に機能しているか否かをも診断することができる。すなわち、トルクセンサ300cは、[式2]に示すように、第1〜第4外側静電容量素子C11〜C14の4つの静電容量素子と、第1〜第4内側静電容量素子C21〜C24の4つの静電容量素子と、のいずれを用いても作用したトルクを計測することが可能である。したがって、トルクセンサ300cが正常に機能している場合には、[式2]に示すT1に基づいて計測されたトルクの値と、T2に基づいて計測されたトルクの値と、は実質的に同じ値になる。一方、トルクセンサ300cが正常に機能していない場合には、[式2]に示すT1に基づいて計測されたトルクの値と、T2に基づいて計測されたトルクの値と、は実質的に異なる値になる。
このことに基づき、T1に基づいて計測されたトルクの値とT2に基づいて計測されたトルクの値との差(T1―T2)が所定の閾値を超えているとき、トルクセンサ300cが正常に機能していない(故障している)と判定され得る。なお、本実施の形態では、当該所定の閾値は、予め検出回路340内に格納されている。
以上のような本実施の形態によれば、第1〜第4外側梁構造体331A〜331D及び第1〜第4内側梁構造体331E〜331Hの存在によって、変形体330に生じる弾性変形が計測点P11〜P24において増幅される。このため、高荷重のトルクに対応可能でありながら、高精度且つ高感度でトルクを検出可能なトルクセンサ300cを提供することができる。
本実施の形態でも、2つの固定部333、335は、Z軸方向から見て、変形体330とY軸とが重なる部位にX軸対称に位置付けられており、2つの受力部332、334は、Z軸方向から見て、変形体330とX軸とが重なる部位にY軸対称に位置付けられている。このため、各変形部336A〜336Dに効果的に弾性変形を生じさせることができる。
また、4つの外側梁構造体331A〜331Dの各計測点P11〜P14は、正のV軸上、正のW軸上、負のV軸上及び負のW軸上に1つずつ位置付けられており、4つの内側梁構造体331E〜331Hの各計測点P21〜P24も、正のV軸上、正のW軸上、負のV軸上及び負のW軸上に1つずつ位置付けられている。このため、計測点P11〜P24において、対応する変形部336A〜336Dに生じる弾性変形を効率的に増幅させることができる。
本実施の形態の検出回路340は、[式2]に示すT1及びT2の少なくとも一方に基づいて、作用したトルクを示す電気信号を出力するようになっている。このため、いずれの式T1、T2を用いた場合でも、作用したトルクを容易に検出することができると共に、Z軸まわりのトルク以外の力(X,Y,Z軸方向の力やX,Z軸回りのトルク)による影響や、使用環境の温度変化による影響を受けることなく、所望のトルクを検出することができる。
更に、検出回路340は、第1〜第4外側静電容量素子C11〜C14の静電容量値の変動量に基づいて計測されたトルクT1と、第1〜第4内側静電容量素子C21〜C24の静電容量値の変動量に基づいて計測されたトルクと、を比較することによって、トルクセンサ300cが正常に機能しているか否かを判定するようになっている。このため、作用したトルクを検出することに加え、単一のトルクセンサ300cによって、その故障診断をも行うことができる。
<<< §4. 各実施の形態における梁構造体の変形例 >>>
以上に示した各実施の形態では、梁構造体は、いわゆる片持ち梁として構成されていた。片持ち梁は、梁の一端が自由端となっているため、両持ち梁と比較して、共振周波数が低く、外部の振動の影響を受けやすい。例えば、各実施の形態によるトルクセンサ100c、200c、300cをモーターに直結した場合、各梁構造体(片持ち梁)とモーターの振動数(数KHz)とが一致してしまう可能性がある。更に、梁構造体は、外部環境において生じる振動の影響も受ける。この場合、トルクセンサ100c、200c、300cに設けられた梁構造体に生じる振動がノイズとして出力される電気信号に加えられることになる。すなわち、トルクセンサ100c、200c、300cが設置される環境において発生する振動の影響によって、当該トルクセンサ100c、200c、300cの出力も振動してしまい、作用するトルクが正確に検出できないおそれがある。
このような問題の解決策の一案として、図15及び図16に示すように、梁構造体を両持ち梁にて構成することが有効である。
図15は、図10の変形例を示す概略平面図であり、図16は、図10の他の変形例を示す概略平面図である。ここでは、主として図10(第2の実施の形態)の変形例について説明を行うが、同様の構造を、図6(第1の実施の形態)及び図14(第3の実施の形態)にて採用することもできる。
図15に示すように、本変形例によるトルクセンサ201cは、各梁構造体231A〜231Dの梁231Ab〜231Dbの先端と固定体10または受力体20とを連結する連結体231Ac〜231Dcを有している点で、第2の実施の形態によるトルクセンサ200cと異なっている。
具体的には、固定体10は、正のY軸上に位置する固定体接続部11に、変形体230の固定部233を介してY軸正方向に延び出た第1延出部11eと、負のY軸上に位置する固定体接続部12に、変形体230の固定部235を介してY軸負方向に延び出た第2延出部12eと、を有している。各延出部11e、12eの先端と受力体20の内周面との間には所定の隙間が存在している。そして、図15に示すように、第1梁構造体231Aの梁231Abの先端と第1延出部11eとが柔軟な第1連結体231Acによって連結されている。更に、第2梁構造体231Bの梁231Bbの先端と受力体接続部21とが柔軟な第2連結体231Bcによって連結されており、第3梁構造体231Cの梁231Cbの先端と第2延出部12eとが柔軟な第3連結体231Ccによって連結されており、第4梁構造体231Dの梁231Dbの先端と受力体接続部22とが柔軟な第4連結体231Dcによって連結されている。
あるいは、図16に示すように、延出部11e、12eに代えて、受力体20の内周面のうちY軸上に位置する2つの部位に径方向内側に突出した第1突出部24及び第2突出部25を設けても良い。この場合、第1連結体231Acの一端を第1延出部11eに代えて第1突出部24に連結し、第3連結体231Ccの一端を第2延出部12eに代えて第2突出部25に連結すれば良い。
以上のような両持ち梁による梁構造体を有するトルクセンサ201c、202cによれば、連結体231Ac〜231Dcの存在によって、外部環境において生じる振動が減衰されて梁構造体231A〜231Dに伝達されることになる。このため、トルクセンサ201c、202cから出力される電気信号に含まれるノイズが低減または除去され、トルクの計測をより高精度で行うことができる。
なお、以上のような両持ち梁による構造体を第1の実施の形態によるトルクセンサ100c(図6参照)に採用する場合には、図15に示すトルクセンサ201cまたは図16に示すトルクセンサ202cの第1象限に示されている構造を採用すればよい。また、以上のような両持ち梁による構造体を第3の実施の形態によるトルクセンサ300c(図14参照)に採用する場合、第1〜第4外側梁構造体331A〜331Dについては、図15に示すトルクセンサ201cまたは図16に示すトルクセンサ202cと同じ構造を採用することができる。残りの第1〜第4内側梁構造体331E〜331Hについては、例えば、第1及び第3内側梁331Eb、331Gbの先端と固定体接続部11、12とを柔軟な連結体でそれぞれ連結し、第2及び第4内側梁331Fb、331Hbの先端と固定体10とを柔軟な連結体で接続すればよい。
<<< §4. 極板間の実効対向面積を一定に保つための工夫 >>>
以上の各トルクセンサは、トルクが作用した結果、固定電極に対する変位電極の相対位置が変化した場合にも、静電容量素子を構成する一対の電極の実効対向面積が変化しないように、各静電容量素子を構成する固定電極および変位電極のうちの一方の面積を他方の面積よりも大きく設定することも考えられる。これは、面積が小さい方の電極(例えば変位電極)の輪郭を、面積が大きい方の電極(例えば固定電極)の表面に当該電極の法線方向に投影して正射影投影像を形成した場合、面積が小さい方の電極の投影像が、面積が大きい方の電極の表面内に完全に含まれるような状態である。この状態が維持されれば、両電極によって構成される静電容量素子の実効面積は、小さい方の電極の面積に等しくなり、常に一定になる。すなわち、力の検出精度を向上させることができる。
これまでに説明してきた各実施の形態及び変形例の各々は、対応する各図面に示されているように、固定電極の面積の方が変位電極の面積よりも大きく構成されている。
<<< §5. その他の変形例 >>>
以上に示した各実施の形態及び変形例において、受力体20をXYZ三次元座標系に対して固定された固定体とし、固定体10をZ軸回りに回動可能な受力体として構成することも可能である。このようなトルクセンサの受力体(以上の各実施の形態及び変形例における固定体10に相当)に正のトルクが作用すると、変形体30、230、330には、以上の各実施の形態及び変形例による各トルクセンサにおいて受力体20に負のトルクが作用した場合と同様の弾性変形が生じる。その一方、このようなトルクセンサの受力体に負のトルクが作用すると、変形体30、230、330には、以上の各実施の形態及び変形例による各トルクセンサにおいて受力体20に正のトルクが作用した場合と同様の弾性変形が生じる。したがって、このトルクセンサによってトルクを計測する場合には、上述した[式1]〜[式3]において、T、T1、T2及びT3を−T、−T1、−T2及び−T3にそれぞれ読み替えればよい。
次に、図17は、図10の更に他の変形例によるトルクセンサ203cを示す概略平面図である。図17に示すように、本変形例では、固定電極Ef1〜Ef4を支持する台座23Ac〜23Dcが受力体20から離間して配置されている点で、図10の例とは異なっている。本変形例において、台座23Ac〜23Dcは、図17の手前側から奥側に向かって延在しており、奥側の端部が固定体10に接続されている。これにより、台座23Ac〜23Dcは、固定体10に対して移動しないようになっている。図10に示すトルクセンサ200cでは、台座23Ac〜23Dcが受力体20の内面上に配置されている。
このため、受力体20にZ軸回りのトルク以外の力(例えばX軸方向の力、Y軸方向の力)が作用すると、受力体20と共に各固定電極Ef1〜Ef4がZ軸方向及び/Y軸方向に移動してしまう。これに対し、図17に示すトルクセンサ203cでは、受力体20にZ軸回りのトルク以外の力(例えばX軸方向の力、Y軸方向の力)が作用して、受力体20の中心位置がZ軸方向から見て原点Oと一致しなくなっても、各固定電極Ef1〜Ef4がその影響によって変位してしまうことが無い。これにより、図17に示すトルクセンサは、作用したトルクを一層安定的に計測することができる。
もちろん、このような台座の配置は、これまで説明したトルクセンサ100c(図6参照)、トルクセンサ200c〜202c(図10、図15及び図16参照)及びトルクセンサ300c(図14参照)に対しても、適用することができる。
あるいは、以上に示した各実施の形態及び変形例では、固定体10及び受力体20がXY平面上に同心に配置されているが、図18に示すように、Z軸方向において変形体30、230、330を挟み込むように配置されていても良い。なお、図18においては、固定体10、受力体20及び変形体30、230、330のみが示されており、梁構造体、静電容量素子等の図示は省略されている。もちろん、この場合も、固定体10及び受力体20のうちのいずれか一方がXYZ三次元座標系に対して固定されていれば良い。
また、§2〜§4に示した各実施の形態及び変形例において、各静電容量素子を構成する固定電極は、静電容量素子ごとに個別的に配置されていた。これにより、固定電極の自由度の高い配置が可能である。しかしながら、このような実施の形態には限定されず、例えば、各静電容量素子を構成する固定電極が共通電極として構成されていても良い。
また、以上の説明において、静電容量素子を支持する梁構造体、受力体20及び固定体10は、金属(アルミ軽合金、鉄系合金)によって構成される場合が多い。この場合、電極同士がショートして、トルクを適正に検出することができない。したがって、電極を支持する構成部材が金属にて構成される場合には、図19に示すように当該構成部材Bと電極Eとの間に絶縁体Iを配置すればよい。
以上の説明では、計測点P、P1〜P4、P11〜P24が配置されているV軸及びW軸について、X軸及びY軸に対しそれぞれ45°をなし互いに直交する軸であるとして各実施の形態を説明したが、これには限定されない。静電容量値の変動量は、梁構造体の梁の長さに関係し、梁が長いほど静電容量の変化が大きくなりトルクセンサの感度が高まる。このため、V軸及びW軸が添付の図面の通りに規定されていない場合であっても、計測点Pの位置が梁構造体の支持体から離れて設定されていれば、トルクセンサの感度が高められ、本発明による効果が得られることになる。したがって、V軸及びW軸が、例えば、X軸及びY軸に対して40°あるいは50°といった45°とは異なる角度をなすように規定されていても良い。更に、V軸及びW軸が互いに直交していなくても良い。