以下,本発明の実施形態について図面を用いて説明する。なお,以下では,作業機の先端の作業具(アタッチメント)としてバケット10を備える油圧ショベルを例示するが,バケット以外のアタッチメントを備える作業機械で本発明を適用しても構わない。さらに,複数のリンク部材(アタッチメント,アーム,ブーム等)を連結して構成される多関節型の作業機を有するものであれば油圧ショベル以外の作業機械への適用も可能である。
また,本稿では,或る形状を示す用語(例えば,目標面,設計面等)とともに用いられる「上」,「上方」又は「下方」という語の意味に関し,「上」は当該或る形状の「表面」を意味し,「上方」は当該或る形状の「表面より高い位置」を意味し,「下方」は当該或る形状の「表面より低い位置」を意味することとする。また,以下の説明では,同一の構成要素が複数存在する場合,符号(数字)の末尾にアルファベットを付すことがあるが,当該アルファベットを省略して当該複数の構成要素をまとめて表記することがある。例えば,3つのポンプ300a,300b,300cが存在するとき,これらをまとめてポンプ300と表記することがある。
−油圧ショベルの全体構成−
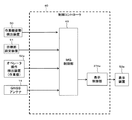
図1は本発明の実施形態に係る油圧ショベルの構成図であり,図2は本発明の実施形態に係る油圧ショベルの制御コントローラを油圧駆動装置と共に示す図であり,図3は図2中のフロント制御用油圧ユニット160の詳細図である。
図1において,油圧ショベル1は,多関節型のフロント作業機1Aと,車体1Bで構成されている。車体1Bは,左右の走行油圧モータ3a,3b(油圧モータ3a,3bは図2を参照)により走行する下部走行体11と,下部走行体11の上に取り付けられ,旋回油圧モータ4(油圧モータ4は図2を参照)により旋回する上部旋回体12とからなる。
フロント作業機1Aは,垂直方向にそれぞれ回動する複数の被駆動部材(ブーム8,アーム9及びバケット10)を連結して構成されている。ブーム8の基端は上部旋回体12の前部においてブームピンを介して回動可能に支持されている。ブーム8の先端にはアームピンを介してアーム9が回動可能に連結されており,アーム9の先端にはバケットピンを介してバケット10が回動可能に連結されている。ブーム8はブームシリンダ5によって駆動され,アーム9はアームシリンダ6によって駆動され,バケット10はバケットシリンダ7によって駆動される。
ブーム8,アーム9,バケット10の回動角度α,β,γ(図4参照)を測定可能なように,ブームピンにブーム角度センサ30,アームピンにアーム角度センサ31,バケットリンク13にバケット角度センサ32が取付けられ,上部旋回体12には基準面(例えば水平面)に対する上部旋回体12(車体1B)の傾斜角θ(図4参照)を検出する車体傾斜角センサ33が取付けられている。なお,角度センサ30,31,32はそれぞれ基準面(例えば水平面)に対する角度センサに代替可能である。
上部旋回体12に設けられた運転室16内には,走行右レバー23a(図2)を有し走行右油圧モータ3a(下部走行体11)を操作するための操作装置47a(図2)と,走行左レバー23b(図2)を有し走行左油圧モータ3b(下部走行体11)を操作するための操作装置47b(図2)と,操作右レバー1a(図2)を共有しブームシリンダ5(ブーム8)及びバケットシリンダ7(バケット10)を操作するための操作装置45a,46a(図2)と,操作左レバー1b(図2)を共有しアームシリンダ6(アーム9)及び旋回油圧モータ4(上部旋回体12)を操作するための操作装置45b,46b(図2)が設置されている。以下では,走行右レバー23a,走行左レバー23b,操作右レバー1aおよび操作左レバー1bを操作レバー23,1と総称することがある。
上部旋回体12に搭載された原動機であるエンジン18は,油圧ポンプ2とパイロットポンプ48を駆動する。油圧ポンプ2はレギュレータ2aによって容量が制御される可変容量型ポンプであり,パイロットポンプ48は固定容量型ポンプである。本実施形態においては,図2に示すように,パイロットライン144,145,146,147,148,149の途中にシャトルブロック162が設けられている。操作装置45,46,47から出力された油圧信号が,このシャトルブロック162を介してレギュレータ2aにも入力される。シャトルブロック162の詳細構成は省略するが,油圧信号がシャトルブロック162を介してレギュレータ2aに入力されており,油圧ポンプ2の吐出流量が当該油圧信号に応じて制御される。
パイロットポンプ48の吐出配管であるポンプライン170はロック弁39を通った後,複数に分岐して操作装置45,46,47,フロント制御用油圧ユニット160内の各弁に接続している。ロック弁39は本例では電磁切換弁であり,その電磁駆動部は上部旋回体12の運転室16に配置されたゲートロックレバー(不図示)の位置検出器と電気的に接続している。ゲートロックレバーのポジションは位置検出器で検出され,その位置検出器からロック弁39に対してゲートロックレバーのポジションに応じた信号が入力される。ゲートロックレバーのポジションがロック位置にあればロック弁39が閉じてポンプライン170が遮断され,ロック解除位置にあればロック弁39が開いてポンプライン170が開通する。つまり,ポンプライン170が遮断された状態では操作装置45,46,47による操作が無効化され,旋回,掘削等の動作が禁止される。
操作装置45,46,47は,油圧パイロット方式であり,パイロットポンプ48から吐出される圧油をもとに,それぞれオペレータにより操作される操作レバー1,23の操作量(例えば,レバーストローク)と操作方向に応じたパイロット圧(操作圧と称することがある)を発生する。このように発生したパイロット圧は,コントロールバルブユニット(図示せず)内の対応する流量制御弁15a〜15f(図2参照)の油圧駆動部150a〜155bにパイロットライン144a〜149b(図3参照)を介して供給され,これら流量制御弁15a〜15fを駆動する制御信号として利用される。
油圧ポンプ2から吐出された圧油は,流量制御弁15a,15b,15c,15d,15e,15fを介して走行右油圧モータ3a,走行左油圧モータ3b,旋回油圧モータ4,ブームシリンダ5,アームシリンダ6,バケットシリンダ7,に供給される。供給された圧油によってブームシリンダ5,アームシリンダ6,バケットシリンダ7が伸縮することで,ブーム8,アーム9,バケット10がそれぞれ回動し,バケット10の位置及び姿勢が変化する。また,供給された圧油によって旋回油圧モータ4が回転することで,下部走行体11に対して上部旋回体12が旋回する。そして,供給された圧油によって走行右油圧モータ3a,走行左油圧モータ3bが回転することで,下部走行体11が走行する。
図3に示すように,フロント制御用油圧ユニット160は,ブーム8用の操作装置45aのパイロットライン144a,144bに設けられ,操作レバー1aの操作量としてパイロット圧(第1制御信号)を検出する圧力センサ70a,70bと,一次ポート側がポンプライン170を介してパイロットポンプ48に接続されパイロットポンプ48からのパイロット圧を減圧して出力する電磁比例弁54aと,ブーム8用の操作装置45aのパイロットライン144aと電磁比例弁54aの二次ポート側に接続され,パイロットライン144a内のパイロット圧と電磁比例弁54aから出力される制御圧(第2制御信号)の高圧側を選択し,流量制御弁15aの油圧駆動部150aに導くシャトル弁82aと,ブーム8用の操作装置45aのパイロットライン144bに設置され,制御コントローラ40からの制御信号を基にパイロットライン144b内のパイロット圧(第1制御信号)を低減して出力する電磁比例弁54bを備えている。
また,フロント制御用油圧ユニット160は,アーム9用のパイロットライン145a,145bに設置され,操作レバー1bの操作量としてパイロット圧(第1制御信号)を検出して制御コントローラ40に出力する圧力センサ71a,71bと,パイロットライン145bに設置され,制御コントローラ40からの制御信号を基にパイロット圧(第1制御信号)を低減して出力する電磁比例弁55bと,パイロットライン145aに設置され,制御コントローラ40からの制御信号を基にパイロットライン145a内のパイロット圧(第1制御信号)を低減して出力する電磁比例弁55aが設けられている。
また,フロント制御用油圧ユニット160は,バケット10用のパイロットライン146a,146bには,操作レバー1aの操作量としてパイロット圧(第1制御信号)を検出して制御コントローラ40に出力する圧力センサ72a,72bと,制御コントローラ40からの制御信号を基にパイロット圧(第1制御信号)を低減して出力する電磁比例弁56a,56bと,一次ポート側がパイロットポンプ48に接続されパイロットポンプ48からのパイロット圧を減圧して出力する電磁比例弁56c,56dと,パイロットライン146a,146b内のパイロット圧と電磁比例弁56c,56dから出力される制御圧の高圧側を選択し,流量制御弁15cの油圧駆動部152a,152bに導くシャトル弁83a,83bとがそれぞれ設けられている。なお,図3では,圧力センサ70,71,72と制御コントローラ40との接続線は紙面の都合上省略している。
電磁比例弁54b,55a,55b,56a,56bは,非通電時には開度が最大で,制御コントローラ40からの制御信号である電流を増大させるほど開度は小さくなる。一方,電磁比例弁54a,56c,56dは,非通電時には開度をゼロ,通電時に開度を有し,制御コントローラ40からの電流(制御信号)を増大させるほど開度は大きくなる。このように各電磁比例弁の開度54,55,56は制御コントローラ40からの制御信号に応じたものとなる。
作業機1Aの姿勢は図4のショベル座標系(ローカル座標系)に基づいて定義できる。図4のショベル座標系は,上部旋回体12に設定された座標であり,ブーム8の基底部を原点P0とし,上部旋回体12における鉛直方向にZ軸,水平方向にX軸を設定した。また,X軸とZ軸によって右手系で規定される方向をY軸とする。X軸に対するブーム8の傾斜角をブーム角α,ブームに対するアーム9の傾斜角をアーム角β,アームに対するバケット爪先の傾斜角をバケット角γとした。水平面(基準面)に対する車体1B(上部旋回体12)の傾斜角を傾斜角θとした。ブーム角αはブーム角度センサ30により,アーム角βはアーム角度センサ31により,バケット角γはバケット角度センサ32により,傾斜角θは車体傾斜角センサ33により検出される。ブーム角αは,ブーム8を最大(最高)まで上げたとき(ブームシリンダ5が上げ方向のストロークエンドのとき,つまりブームシリンダ長が最長のとき)に最少となり,ブーム8を最小(最低)まで下げたとき(ブームシリンダ5が下げ方向のストロークエンドのとき,つまりブームシリンダ長が最短のとき)に最大となる。アーム角βは,アームシリンダ長が最短のときに最小となり,アームシリンダ長が最長のときに最大となる。バケット角γは,バケットシリンダ長が最短のとき(図4のとき)に最小となり,バケットシリンダ長が最長のときに最大となる。このとき,ブーム8の基底部からアーム9との接続部までの長さをL1,アーム9とブーム8の接続部からアーム9とバケット10の接続部までの長さをL2,アーム9とバケット10の接続部からバケット10の先端部までの長さをL3とすると,ショベル座標系におけるバケット10の先端位置は,XbkをX方向位置,ZbkをZ方向位置として,以下の式(1)(2)で表すことができる。
Xbk=L1cos(α)+L2cos(α+β)+L3cos(α+β+γ)…式(1)
Zbk=L1sin(α)+L2sin(α+β)+L3sin(α+β+γ)…式(2)
また,油圧ショベル1は,図1に示すように,上部旋回体12に一対のGNSS(Global Navigation Sattelite System)アンテナ14A,14Bを備えている。GNSSアンテナ14からの情報に基づき,グローバル座標系における油圧ショベル1の位置,またバケット10の位置を算出することができる。
図5は本実施形態に係る油圧ショベルが備えるMGシステムの構成図である。本システムでのフロント作業機1AのMGとしては,例えば図8に示すように,油圧ショベル1111による掘削作業のために任意に設定された目標面700と,作業機1A(例えば,バケット10)との位置関係を表示装置53aに表示してオペレータ操作を支援する処理が行われる。
図5のシステムは,作業機姿勢検出装置50と,目標面設定装置51と,オペレータ操作検出装置52aと,運転室16内に設置され目標面700と作業機1Aの位置関係を表示可能な表示装置53aと,グローバル座標系における油圧ショベル1の位置を取得するためのGNSSアンテナ14と,MGを司る制御コントローラ(制御装置)40とを備えている。
作業機姿勢検出装置50は,ブーム角度センサ30,アーム角度センサ31,バケット角度センサ32,車体傾斜角センサ33から構成される。これらの角度センサ30,31,32,33は作業機1Aの姿勢センサとして機能している。
目標面設定装置51は,目標面700に関する情報(各目標面の位置情報や傾斜角度情報を含む)を入力可能なインターフェースである。目標面700は,設計面を施工に適した形で抽出・修正したものである。目標面設定装置51は,グローバル座標系(絶対座標系)上に規定された目標面の3次元データを格納した外部端末(図示せず)と接続されている。目標面700の位置情報は,油圧ショベル1の掘削作業で形成すべき最終目標形状である設計面の位置情報に基づいて作成される。通常,掘削作業の場合には目標面700は設計面上またはその上方に設定され,盛土作業の場合には設計面上またはその下方に設定される。なお,目標面設定装置51を介した目標面の入力はオペレータが手動で行っても良い。
オペレータ操作検出装置52aは,オペレータによる操作レバー1a,1b(操作装置45a,45b,46a)の操作によってパイロットライン144,145,146に生じる操作圧(第1制御信号)を取得する圧力センサ70a,70b,71a,71b,72a,72b(図3参照)から構成される。すなわち,作業機1Aに係る油圧シリンダ5,6,7に対する操作量を検出している。
制御コントローラ40は,入力インターフェース91と,プロセッサである中央処理装置(CPU)92と,記憶装置であるリードオンリーメモリ(ROM)93及びランダムアクセスメモリ(RAM)94と,出力インターフェース95とを有している。入力インターフェース91には,作業機姿勢検出装置50である角度センサ30〜32及び傾斜角センサ33からの信号と,目標面設定装置51からの信号と,GNSSアンテナ14からの信号と,オペレータ操作検出装置52aからの信号が入力され,CPU92が演算可能なように変換する。ROM93は,後述するフローチャートに係る処理を含めMGを実行するための制御プログラムと,当該フローチャートの実行に必要な各種情報等が記憶された記録媒体であり,CPU92は,ROM93に記憶された制御プログラムに従って入力インターフェース91及びROM93,RAM94から取り入れた信号に対して所定の演算処理を行う。出力インターフェース95は,CPU92での演算結果に応じた出力用の信号を作成し,その信号を表示装置53aに出力すること表示装置53aを作動させられることができる。
なお,図5の制御コントローラ40は,記憶装置としてROM93及びRAM94という半導体メモリを備えているが,記憶装置であれば特に代替可能であり,例えばハードディスクドライブ等の磁気記憶装置を備えても良い。
図6は,制御コントローラ40の機能ブロック図である。制御コントローラ40は,MG制御部43と,表示制御部374aを備えている。
図7は図6中のMG制御部43の機能ブロック図である。MG制御部43は,操作量演算部43aと,シリンダ速度演算部43bと,記憶部43mと,基準点位置演算部43dと,作業機械位置演算部43eと,目標面距離演算部43fと,判定部43gと,移動方向演算部43hを備えている。記憶部43mは,通達領域記憶部43kと,目標面記憶部43cを備えている。
操作量演算部43aは,オペレータ操作検出装置52aからの入力を基に操作装置45a,45b,46a(操作レバー1a,1b)の操作量を算出する。圧力センサ70,71,72の検出値から操作装置45a,45b,46aの操作量が算出できる。
なお,圧力センサ70,71,72による操作量の算出は一例に過ぎず,例えば各操作装置45a,45b,46aの操作レバーの回転変位を検出する位置センサ(例えば,ロータリーエンコーダ)で当該操作レバーの操作量を検出しても良い。また,操作量から動作速度を算出する構成に代えて,各油圧シリンダ5,6,7の伸縮量を検出するストロークセンサを取り付け,検出した伸縮量の時間変化を基に各シリンダの動作速度を算出する構成も適用可能である。
シリンダ速度演算部43bは,操作量演算部43aで演算された操作量を基に各油圧シリンダ5,6,7の動作速度(シリンダ速度)を演算する。各油圧シリンダ5,6,7の動作速度は,操作量演算部43aで演算された操作量と,流量制御弁15a,15b,15cの特性と,各油圧シリンダ5,6,7の断面積と,油圧ポンプ2の容量(傾転角)と回転数を乗じて得られるポンプ流量(吐出量)等から算出できる。
目標面記憶部43cは,目標面設定装置51からの情報に基づき演算された目標面700の位置情報(目標面データ)を記憶する。本実施形態では,図5に示すように,3次元の目標面を作業機1Aが移動する平面(作業機の動作平面)で切断した断面形状を目標面700(2次元の目標面)として利用する。なお,図5の例では目標面700は1つだが,傾斜の異なる複数の目標面が連結している場合もある。複数の目標面が連結している場合には,例えば,作業機1Aから最も近いものを目標面と設定する方法や,バケット爪先の下方に位置するものを目標面とする方法や,任意に選択したものを目標面とする方法等がある。
通達領域記憶部43kは,目標面700から離れた位置に設定された閉領域である通達領域Acの位置情報を記憶している。詳細は後述するが,本実施形態では,図9に示すように,セグメント50_+1とセグメント50_−1に対応する範囲,すなわち,目標面700を基準として+50mmより大きく+100mm以下の範囲と,−50mmより小さく−100mm以上の範囲に通達領域Acが設定されている。通達領域Acは,基準点Psが目標面700から離れる旨を表示画面上のセグメント74(後述)で通達する関係上,その内部に目標面700が含まれないように設定することが好ましい。また,通達領域Acの位置は例えば掘削誤差の許容範囲を基準に決定できる。ここで「掘削誤差の許容範囲」とは作業機1Aにより形成される実際の面と目標面700のズレが許容される範囲であり,通達領域Acはこの掘削誤差の許容範囲内に設定することが好ましい。例えば掘削誤差の許容範囲が±100mm以内の場合,通達領域Acは50mmより大きくかつ100mm以下の範囲に設定できる。またこの範囲に加えて又は代えて,−50mmより小さくかつ−100mm以上の範囲に通達領域Acを設定しても良い。なお,通達領域Acの位置は,目標面700ごとに異ならせても良いし,制御コントローラ40に接続された入力装置(図示せず)を介して事後的に変更可能に構成しても良い。
作業機械位置演算部43eは,一対のGNSSアンテナ14からの情報に基づいてグローバル座標系における油圧ショベル1の位置情報(図4のショベル座標系の原点である車体基準位置P0の座標)と方位情報と車体傾斜角度θを演算し,そのデータを基準点位置演算部43dに出力する。
基準点位置演算部(バケット位置演算部)43dは,作業機1Aに任意に設定した基準点Ps(図8参照)の位置情報を演算する。本実施形態の基準点Psは図8に示すようにバケット10の爪先におけるバケット幅方向の中心点とし,その位置はグローバル座標系で定義するものとする。まず,基準点位置演算部43dは,作業機姿勢検出装置50からの情報に基づき,ショベル座標系(ローカル座標系)におけるフロント作業機1Aの姿勢と,バケット10の爪先の位置を演算する。既述のとおり,バケット10の爪先位置情報(Xbk,Zbk)(バケット位置データ)は,式(1)及び式(2)により演算できる。また,グローバル座標系における車体基準位置P0の座標と車体傾斜角度θと,ローカル座標系における爪先位置に基づいて,バケット10の爪先(基準点Ps)の座標値をローカル座標からグローバル座標に変換できる。以下,グローバル座標系として例を説明する。ただし,ローカル座標系で統一して以下の処理を行っても構わない。
目標面距離演算部43fは,基準点位置演算部43dで算出された基準点(バケット爪先)Psの位置情報と目標面記憶部43cに記憶された目標面700の位置情報に基づいて,基準点Psから目標面700に向かって所定の方向に延ばした仮想直線Lv(図8参照)上における基準点(バケット爪先)Psと目標面700の距離である目標面距離Ltip(図8参照)を演算する。本実施形態における仮想直線Lvの「所定の方向」は図8に示すように鉛直方向とする。すなわち,バケット爪先から鉛直方向に延ばした仮想直線Lv上におけるバケット爪先と目標面700の距離が目標面距離Ltipとなる。本稿では,基準点Psが目標面700の上方にあるときの目標面距離Ltipは正の値で表し,基準点Psが目標面700の下方にあるときの目標面距離Ltipは負の値で表すものとする。
判定部43gは,基準点(バケット爪先)Psが通達領域Ac内に存在するか否かを,基準点位置演算部43dで算出された基準点Psの位置情報と通達領域記憶部43kに記憶された通達領域Acの位置情報に基づいて判定し,その判定結果を表示制御部374aに出力する。本実施形態では目標面距離Ltipが通達領域Acに存在するか否かで当該判定を行う。より具体的には,+50mmより大きく+100mm以下の範囲と,−50mmより小さく−100mm以上の範囲のいずれかに目標面距離Ltipが含まれるか否かを判定することで当該判定を行う。
移動方向演算部43hは,基準点(バケット爪先)Psの位置情報に基づいて基準点Psの移動方向を演算する。本実施形態の移動方向演算部43hは,基準点位置演算部43dで演算される基準点Psの位置情報と,オペレータ操作検出装置52aを介して検出される操作装置45a,45b,46aに対する操作情報から演算される各油圧シリンダ5,6,7の速度情報に基づいて基準点Psの移動方向を演算している。ここで油圧シリンダ5,6,7の速度情報はシリンダ速度演算部43bから入力している。基準点Psの位置情報からはフロント作業機1Aの姿勢が特定でき,これに各油圧シリンダ5,6,7の速度情報を考慮することで,基準点Psの速度ベクトルが演算できる。基準点Psの移動方向は当該速度ベクトルの方向である。
表示制御部374aは,MG制御部43から入力される情報を基に表示装置53aを制御する。制御コントローラ40には,フロント作業機1Aの画像及びアイコンを含む表示関連データが多数格納されている表示ROMが備えられており,表示制御部374aが,MG制御部43からの入力情報に基づいて所定のプログラムを読み出すとともに,表示装置53aにおける表示制御をする。本実施形態の表示制御部374aは,基準点位置演算部43dから入力される基準点Ps(バケット爪先)の位置情報及びフロント作業機1Aの姿勢情報と,目標面記憶部43cから入力される目標面700の位置情報と,目標面距離演算部43fから入力される目標面距離Ltipと,判定部43gから入力される判定結果の情報と,移動方向演算部43hから入力される移動方向情報に基づいて表示装置53を制御する。
具体的には,表示制御部374aは,判定部43gの判定結果と移動方向演算部43hで演算した移動方向情報に基づいて,判定部43gで基準点Psが通達領域Ac内に存在するか否かと,移動方向演算部43hで演算された移動方向が目標面700から離れる方向か否かを判定する。そして,判定部43gで基準点Psが通達領域Ac内に存在し,かつ,移動方向演算部43hで演算された移動方向が目標面700から離れる方向であると判定した場合には,基準点Psが目標面700から離れる旨をオペレータに表示画面を介して通達する。そのときの表示画面の詳細を次に説明する。
図8は本実施形態の表示装置53aの表示画面の一例である。この図の表示画面は,目標面700と作業機1A(基準点Ps)の位置関係が複数のセグメントで表示される第1表示部71と,目標面700と作業機1A(基準点Ps)の位置関係がバケット10の画像で表示される第2表示部72を備えている。
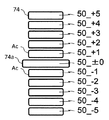
第1表示部71には,第1背景色で表示される背景73の上に一の方向(図8の例では画面の上下方向)に沿って配置された複数のセグメント74(本実施形態では11個のセグメント)が表示されている。複数のセグメント74には,目標面700の位置を示す目標面位置セグメント74aが含まれている。目標面位置セグメント74aとその他のセグメントの距離は,目標面700から当該その他のセグメントに対応する位置の距離を示しており,目標面位置セグメント74aから離れたセグメントほど目標面700から離れた位置を示している。通達領域Asは,複数のセグメント74から目標面位置セグメント74aを除いたセグメントの少なくとも1つのセグメントに対応する位置(距離)に設定されている。複数のセグメント74には,基準点Psの位置に応じて第1セグメント色で表示される基準点位置セグメント74bが含まれている。基準点Psが目標面位置セグメント74aに対応する位置に在るときは,目標面位置セグメント74aが基準点位置セグメント74bとなる。
本実施形態の11個のセグメント74には図9に示すように「50_−5」から「50_+5」までの識別子が付与されている(以下では,セグメントの説明でこの「識別子」と「符号74」を適宜使い分ける)。11個のセグメント74のそれぞれには,目標面距離Ltipの範囲が重複無く割り当てられている。具体的には,セグメント50_±0には目標面700の上方と下方にそれぞれ50mm,すなわち合計で100[mm]の範囲が割り当てられており,セグメント50_+1には目標面700から上方に50mmから100mmまでの範囲が,セグメント50_+2には目標面700から上方に100mmから150mmまでの範囲が,セグメント50_+3には目標面700から上方に150mmから200mmまでの範囲が,セグメント50_+4には目標面700から上方に200mmから250mmまでの範囲が,セグメント50_+5には目標面700から上方に250mmを超える範囲が割り当てられている。また,セグメント50_−1には目標面700から下方に50mmから100mmまでの範囲が,セグメント50_−2には目標面700から下方に100mmから150mmまでの範囲が,セグメント50_−3には目標面700から下方に150mmから200mmまでの範囲が,セグメント50_−4には目標面700から下方に200mmから250mmまでの範囲が,セグメント50_−5には目標面700から下方に250mmを超える範囲が割り当てられている。
各セグメント74は目標面距離Ltipに応じて第1セグメント色で表示されることがある。図10は第1セグメント色で表示されるセグメント74と目標面距離Ltipの関係を示す図である。図10では,目標面距離Ltipの単位は[mm]であり,各セグメント74が第1セグメント色で表示される場合を「ON」と示し,第1背景色で表示される場合を「OFF」と示している。具体的には,50[mm]≧Ltip≧−50[mm]の場合にはセグメント50_±0のみが第1セグメント色で表示され,100[mm]≧Ltip>50[mm]の場合には2つのセグメント50_±0,50_+1が第1セグメント色で表示され,150[mm]≧Ltip>100[mm]の場合には3つのセグメント50_±0,50_+1,50_+2が第1セグメント色で表示され,200[mm]≧Ltip>150[mm]の場合には4つのセグメント50_±0,50_+1,50_+2,50_+3が第1セグメント色で表示され,250[mm]≧Ltip>200[mm]の場合には5つのセグメント50_±0,50_+1,50_+2,50_+3,50_+4が第1セグメント色で表示され,Ltip>250[mm]の場合には6つのセグメント50_±0,50_+1,50_+2,50_+3,50_+4,50_+5が第1セグメント色で表示される。目標面距離Ltipが負の値となる場合(目標面700の下方に基準点Psが位置する場合)も同様である。図8の例では,目標面距離Ltip=80mmなので,2つのセグメント50_±0,50_+1が第1セグメント色で表示されており,この表示によりオペレータは目標面700の上方の50−100[mm]の距離にバケット爪先(基準点Ps)が在ることを認識できる。
但し,通達領域Acとして設定されたセグメント74の範囲内で基準点Psの移動方向が目標面700から離れる方向のときは,第1セグメント色で表示されると図10で規定されているセグメントが第2セグメント色で表示されることがある。本実施形態では,図9に示すように,セグメント50_+1とセグメント50_−1に対応する範囲,すなわち,+50mmより大きく+100mm以下の範囲と,−50mmより小さく−100mm以上の範囲に通達領域Acが設定されている。
図11は表示制御部374aによって実行される各セグメント74及び背景73の表示色の決定処理のフローチャートである。表示制御部374aは図11の処理を所定の制御周期で繰り返し実行している。
図11のフローチャートの処理を開始すると,表示制御部374aは,目標面距離演算部43fから目標面距離Ltipを取得し(S101),判定部43gから判定結果を取得し(S102),移動方向演算部43hから基準点Ps(バケット爪先)の移動方向(基準点Psの速度ベクトル)を取得する(S103)。
S104では,表示制御部374aは,通達領域Acであるセグメント50_+1とセグメント50_−1に対応する範囲,すなわち,+50mmより大きく+100mm以下の範囲と−50mmより小さく−100mm以上の範囲に基準点Psが位置するか否かをS102で取得した判定結果を基に判定する。基準点Psが通達領域Ac内に存在していると判定した場合にはS105に進み,そうでない場合にはS108に進む。
S108では,表示制御部374aは,S101で取得した目標面距離Ltipに基づいて基準点Psが存在するセグメント74を特定し,そのセグメント74を基準点位置セグメント74aとして第1セグメント色で表示する。また,目標面位置セグメント74b(セグメント50_±0)を第1セグメント色で表示し,さらに,基準点位置セグメント74aと目標面位置セグメント74bの2つに挟まれたセグメントがあればそれらも第1セグメント色で表示する。一方,第1セグメント色で表示したセグメント以外のセグメントと背景73は第1背景色で表示する。図12はセグメント50_+1が基準点位置セグメント74aのときにS108で表示装置53a上に表示される画面の一例を示す図である。
S105では,表示制御部374aは,基準点Psの移動方向が目標面700から離れる方向か否かを,S103で取得した基準点Psの速度ベクトルの目標面700に対する垂直成分(以下,「基準点Psの速度ベクトルの垂直成分」と称することがある)の方向に基づいて判定する。具体的には,表示制御部374aは,基準点Psが目標面700の上方にある場合は基準点Psの速度ベクトルの垂直成分が上向きのときに基準点Psの移動方向が目標面700から離れる方向であると判定し,基準点Psが目標面700の下方にある場合は基準点Psの速度ベクトルの垂直成分が下向きのときに基準点Psの移動方向が目標面700から離れる方向であると判定する。基準点Psの移動方向が目標面700から離れる方向であると判定した場合にはS106に進み,そうでない場合にはS108に進む。なお,S105で操作装置45a,45b,46aへの入力が無い場合には,基準点Psの速度ベクトルはゼロであるのでS108に進む。つまり,通常の第1セグメント色で表示されるので,非操作時に第2セグメント色が無駄に表示されてオペレータが煩わしく感じることが無い。
S106では,表示制御部374aは,S101で取得した目標面距離Ltipに基づいて基準点Psが存在するセグメント74を特定し,そのセグメント74を基準点位置セグメント74aとして第2セグメント色で表示する。第2セグメント色は第1セグメント色とは異なる色である。また,目標面位置セグメント74b(セグメント50_±0)を第2セグメント色で表示し,さらに,基準点位置セグメント74aと目標面位置セグメント74bの2つに挟まれたセグメントがあればそれらも第2セグメント色で表示する。一方,第2セグメント色で表示したセグメント以外のセグメントと背景73は第2背景色で表示する。第2背景色は第1背景色とは異なる色である。図13はセグメント50_+1が基準点位置セグメント74aのときにS106で表示装置53a上に表示される画面の一例を示す図である。
ところで,画面の表示情報の視認性を向上するためには背景色と前景色の組合せで充分なコントラストが確保されることが好ましく,W3C(World Wide Web Consortium)は,背景色と前景色の明度差が125以上かつ色差が500以上の組合せであれば充分なコントラストが確保できると提唱している。明度差と色差は下記式(3),(4)のように定義される。式(3),(4)中のR,G,Bは,それぞれRGBカラーの赤,緑,青を表し,それぞれ10進数で0−255のいずれかの値(RGB値)をとる。式(3),(4)におけるR1,G1,B1は明度差又は色差をとる2つの色の一方のRGB値を示し,R2,G2,B2は明度差又は色差をとる2つの色の他方のRGB値を示す。
明度差=|(R1×299+G1×587+B1×114)/1000−(R2×299+G2×587+B2×114)/1000|…式(3)
色差=(|R1−R2|+|G1−G2|+|B1−B2|)…式(4)
これらを踏まえて,基準点(バケット爪先)Psが目標面700から離れる旨を表示画面を介してオペレータに認識させ易くするには,第2セグメント色と,そのときの背景色である第2背景色は,明度差が125以上かつ色差が500以上の色の組合せであることが好ましい。ただし,図8のように表示装置53aを他の表示と兼用する場合には,当該他の表示に利用される色との関係上,明度差と色差をこれらの数値と同じにすることは困難であることもあるので,明度差が120以上かつ色差が400以上の色の組合せとしても良い。第1セグメント色と,そのときの背景色である第1背景色も同様の組合せにすることが好ましい。本稿では,このように或る色と明度差120以上かつ色差が400以上の色を対照色と称することがある。
第2表示部72には,基準点Psの位置情報及びフロント作業機1Aの姿勢情報及び目標面700の位置情報に基づいて,目標面700と作業機1A(バケット10の爪先)の位置関係が表示される。また,第2表示部72には,目標面距離Ltipが数値で表示される数値表示部80が設けられている。
なお,第2表示部72中には,基準点Psと,仮想直線Lvと,目標面距離Ltipの寸法線が記載されているが,これらは図の説明であり実際の表示画面には表示されない(他の表示画面の図についても同様とする)。表示画面に表示する目標面700の範囲は任意に設定可能である。例えば,基準点Psの位置(すなわちバケット爪先の位置)を基準にし,基準点Psから所定の範囲内に存在する目標面700を表示する方法がある。
−動作・効果−
以上のように構成される実施形態の動作・効果について説明する。ここでは,掘削誤差の許容範囲を±100mmとし,バケット10の爪先を目標面700に沿って車体1B側に引き寄せる水平引き動作で平坦な目標面700を形成する仕上げ作業の場面を想定する。
(1)例えば目標面700を基準として±50mmの範囲で水平引き動作をしている場合には,第1表示部71においてセグメント50_±0のみが第1セグメント色で表示され,他のセグメントと背景73は第1背景色で表示される。この表示画面を視認することでオペレータはバケット爪先が目標面700から適正な範囲に存在することを認識できる。
(2)次にオペレータの意図に反してバケット爪先(基準点Ps)がセグメント50_±0の範囲から上方に移動してセグメント50_+1の範囲に入った場合には,セグメント50_+1が通達領域Acに設定されており,バケット爪先の移動方向が目標面700から離れる方向となるため,爪先が存在する位置に該当するセグメント50_+1(基準点位置セグメント74b)とセグメント50_±0(目標面位置セグメント74a)が図13のように第2セグメント色で表示され,他のセグメントと背景73が第2背景色で表示される。このような通常時と異なる画面表示を視認することでオペレータはバケット爪先が誤差許容範囲から外れそうなことを容易に把握でき,ブーム下げ操作を加える等してバケット爪先を目標面700に近い位置に戻そうとすることができるので,フロント作業機1Aの操作に未熟なオペレータであっても目標面700に沿った仕上げ作業が容易になる。またバケット爪先を再度目標面700に近づける動作を行った場合には,セグメント50_±0,50_+1は通常時の第1セグメント色で再度表示されるので,オペレータは適正な方向にバケット10を動作させていることを即座に把握できる。
(3)一方,(1)の状態からオペレータの意図に反してバケット爪先(基準点Ps)がセグメント50_±0の範囲から下方に移動してセグメント50_−1の範囲に入った場合にも(2)の場合と同様に,爪先が存在する位置に該当するセグメント50_−1(基準点位置セグメント74b)とセグメント50_±0(目標面位置セグメント74a)が第2セグメント色で表示され,他のセグメントと背景73が第2背景色で表示される。したがって,この場合もフロント作業機1Aの操作に未熟なオペレータであっても目標面700に沿った仕上げ作業が容易になる。
特に本実施形態では,セグメント50_±0に隣接し且つ誤差許容範囲内に含まれるセグメント50_+1,50_−1を通達領域Acに設定したので,バケット爪先が目標面700から離れようとする状況を即座にオペレータに通達でき,実際の掘削面と目標面700の位置の乖離が許容範囲内に収まりやすい。
また,本実施形態では,第2セグメント色と第2背景色を明度差が120以上かつ色差が400以上の組合せにしてコントラストを充分確保することで第1セグメント色表示から第2セグメント色表示への画面変化の視認性を著しく向上させている。そのため,実際の掘削面とバケットの動きに注視するためにオペレータの視線がバケット爪先にあっても,その周辺視野に表示装置53aの表示画面があればセグメントの色が変化したことを容易に視認できる。すなわち,本実施形態によれば,オペレータがバケット爪先に注視している場面でも画面変化を認識し易いので,バケット爪先が誤差許容範囲から外れそうなことを把握し易く目標面700に沿った仕上げ作業が容易になる。本実施形態では第1表示部71の表示部分の多くを占める背景73を第1背景色から第2背景色に変更しており,さらに第1背景色と第2背景色の明度差を120以上かつ色差を400以上に確保することで変化の前後でのコントラストも充分確保している。したがって,周辺視野による画面変化の視認性はさらに向上している。
−移動方向演算部43hの変形例−
上記の実施形態では,操作装置45a,45b,46aに対する操作量に基づいて演算された各油圧シリンダ速度に基づいてバケット爪先の速度ベクトルを算出して基準点Psの移動方向を演算したが,基準点位置演算部43dで演算された基準点Psの位置情報の履歴に基づいて基準点Psの移動方向を予測し,その予測から基準点Psの移動方向を演算しても良い。この場合のMG制御部43の機能ブロック図を図14に示す。図14のブロック図では,基準点位置演算部43dで演算された基準点Psの位置情報の履歴が移動方向演算部43hに入力されており,移動方向演算部43hは当該位置情報の履歴に基づいて基準点Psの移動方向を演算し表示制御部374aに出力している。このように構成しても先の実施形態と同様の効果を得ることができる。
また,上記の実施形態では,基準点Psの速度ベクトルの方向のみで図11のS105の判定を行ったが,その際,基準点Psの速度ベクトルの大きさも判定材料に加えても良い。この場合,基準点Psの速度ベクトルの大きさが所定値以下の場合には,目標面700から離れる方向に移動していないと判定しても良い。
また,上記の実施形態では,操作装置45a,45b,46aの操作量を基に基準点Psの移動方向(速度ベクトル)を予測したが,旋回体12や走行体11を動作させてもバケット10が移動することを鑑みて操作装置46b,47a,47bの操作量も考慮して基準点Psの移動方向を予測しても良い。
−表示装置53a以外の通達装置−
上記では表示装置53aで基準点Psが目標面700から離れる旨をオペレータに通達することとしたがその他の通達装置を利用することも可能である。例えば,音声出力装置(例えばスピーカ)を介して音(警報音)を出力して同様の旨をオペレータに通達しても良い。
−その他−
本発明は,上記の実施の形態に限定されるものではなく,その要旨を逸脱しない範囲内の様々な変形例が含まれる。例えば,本発明は,上記の実施の形態で説明した全ての構成を備えるものに限定されず,その構成の一部を削除したものも含まれる。
上記の実施形態では,基準点(バケット爪先)Psから鉛直方向に延ばした直線を仮想直線Lvと定義したが,基準点Psから直線を延ばす方向は任意に設定が可能であり,鉛直方向以外に延ばした直線を仮想直線としても良い。例えば,基準点(バケット爪先)Psを通過し目標面700と直交する直線を仮想直線Lv’とすることができる。
上記の実施形態では,第1セグメント色で表示したセグメント以外のセグメントと背景73は第1背景色で表示したが,両者の色は異ならせても良い。また,第2セグメント色で表示したセグメント以外のセグメントと背景73は第2背景色で表示したが,両者の色は異ならせても良い。さらに,本実施形態では,第1セグメント色と第2背景色,第2セグメント色と第1背景色をそれぞれ同一の色としたが,各色の組合せは異なっていても良い。
上記の実施形態では図11のS106,S108において,基準点位置セグメント74bと,目標面位置セグメント74aと,基準点位置セグメント74bと目標面位置セグメント74aに挟まれるセグメントを第1セグメント色で表示したが,基準点位置セグメント74bだけを第1セグメント色で表示したり,基準点位置セグメント74bと目標面位置セグメント74aだけを第1セグメント色で表示したりしても良い。
上記の実施形態では,セグメント50_±0を除くセグメントの間隔を50mmと均等に設定したが,セグメントの間隔は適宜変更しても良い。例えば,セグメント50_±0とセグメント50_+1の間隔を50mmとし,セグメント50_+1とセグメント50_+2の間隔を100mmとし,セグメント50_+2とセグメント50_+3の間隔を200mmといった具合に間隔を倍々にしてもよい。ただし,その場合には各セグメントの間隔をオペレータが認識できるように数値を付記したり,セグメントの上下方向の長さを間隔に応じて変更する等の工夫を加えることが好ましい。
上記の実施形態では,図11のS104とS105の判定がともにYESの場合に第1セグメント色を第2セグメント色に変更する構成を採用しているが,その際に色の変更だけでなくセグメントを点滅させても良い。
上記の実施形態では操作装置45,46,47を油圧パイロット方式で説明したが,操作信号として電気信号を出力する電気レバー方式の操作装置にも本発明は適用可能であることはいうまでもない。
通達領域Acの位置や各セグメントの単位は予め設定しておいても良いし,事後的にオペレータが所望の値に変更可能に構成しても良い。
上記の制御コントローラ40に係る各構成や当該各構成の機能及び実行処理等は,それらの一部又は全部をハードウェア(例えば各機能を実行するロジックを集積回路で設計する等)で実現しても良い。また,上記の制御コントローラ40に係る構成は,演算処理装置(例えばCPU)によって読み出し・実行されることで当該制御コントローラ40の構成に係る各機能が実現されるプログラム(ソフトウェア)としてもよい。当該プログラムに係る情報は,例えば,半導体メモリ(フラッシュメモリ,SSD等),磁気記憶装置(ハードディスクドライブ等)及び記録媒体(磁気ディスク,光ディスク等)等に記憶することができる。