JP6840518B2 - システム、情報処理装置、情報処理方法及びプログラム - Google Patents
システム、情報処理装置、情報処理方法及びプログラム Download PDFInfo
- Publication number
- JP6840518B2 JP6840518B2 JP2016230028A JP2016230028A JP6840518B2 JP 6840518 B2 JP6840518 B2 JP 6840518B2 JP 2016230028 A JP2016230028 A JP 2016230028A JP 2016230028 A JP2016230028 A JP 2016230028A JP 6840518 B2 JP6840518 B2 JP 6840518B2
- Authority
- JP
- Japan
- Prior art keywords
- monitoring
- information
- monitoring object
- area
- estimation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Landscapes
- Closed-Circuit Television Systems (AREA)
- Studio Devices (AREA)
- Image Analysis (AREA)
Description
特許文献1においては、移動体の移動速度から移動体が到達可能な領域が、監視カメラシステムによる撮像領域(監視エリア)として推定されている。
例えば、推定される監視対象のオブジェクトの移動し得る領域が、実際に監視対象のオブジェクトが移動し得る領域よりも広く推定されると、オブジェクトの監視に用いられるセンサや撮像装置が必要以上に増加する可能性がある。このような場合には、オブジェクトの監視処理の負荷が増大し、効率的な監視処理ができないこととなる。その結果、システム全体の処理に無駄が発生する上に、同時に監視の際に検出する属性の数が制限されてしまうという不都合があった。
(システム構成)
図1は、本実施形態の監視システム100のシステム構成の一例を示す図である。
監視システム100は、複数のカメラ装置101、複数の制御装置102、複数のセンサ装置103を含む。
カメラ装置101のそれぞれは、制御装置102の何れかと有線ケーブル、又は無線通信で接続されている。制御装置102は、それぞれ、カメラ装置101のうちの幾つかを管理しており、管理するカメラ装置101と接続されている。ある制御装置102とその制御装置102が管理しているカメラ装置101及びセンサ装置103とは、まとめて1つの監視ユニットとする。即ち、監視システム100は、複数の監視ユニットを含むこととなる。そして、複数の監視ユニットは、ネットワークを介して相互に接続されている。
カメラ装置101は、例えば、ネットワークカメラ装置や監視システム等の画像入力装置であって、撮影した映像データを有線又は無線ネットワーク経由で制御装置102に送信する。
本実施形態では、カメラ装置101は、監視オブジェクトの移動速度の情報の取得の処理を実行することとする。しかし、カメラ装置101から映像データを受信した制御装置102が受信した映像データに基づいて、監視オブジェクトの移動速度の情報を取得してもよい。
制御装置102のそれぞれは、交差点等の設定された監視範囲に設置された1つ以上のカメラ装置101から、映像データ等を有線又は無線ネットワーク経由で受信する。
本実施形態では、制御装置102とカメラ装置101との接続に利用されるネットワークは、同一セグメントで構成されるネットワークであるとするが、複数のセグメントに分割されているネットワークでもよい。また、制御装置102とカメラ装置101との接続に利用されるネットワークは、有線ネットワークのセグメント同士が、インターネットやWAN(Wide Area Network)を介して接続されているネットワークでもよい。
カメラ装置101により撮影された映像データから検出される監視オブジェクトに関する特徴情報には、例えば、監視オブジェクトの上半身や全体の輪郭や顔等のデータがある。センサ装置103から出力された情報から検出される監視オブジェクトに関する特徴情報には、例えば、監視オブジェクトの位置情報、監視オブジェクトの照明の強度がある。また、センサ装置103から出力された情報から検出される監視オブジェクトに関する特徴情報には、センサ装置103の周囲における監視オブジェクトの存在の有無の情報、監視オブジェクトの重さ、監視オブジェクトの音声等のデータがある。
センサ装置103のそれぞれは、例えば、人感、照度、音、無線ビーコン等の検出機能を有するセンサを有するセンサ装置であり、主に監視オブジェクトの存在、監視オブジェクトが歩行者等である場合の移動速度の検出を目的とする。センサ装置103は、カメラ装置101の何れか又は、制御装置102の何れかにより管理される。センサ装置103は、検出した情報を、有線又は無線ネットワークを介して、そのセンサ装置103を管理する制御装置102やカメラ装置101に送信する。
また、センサ装置103のそれぞれは、近隣に存在する他のセンサ装置103から有線又は無線ネットワークを介して接続され、他のセンサ装置103から、他のセンサ装置103により検出された情報を受信することができる。そして、そのセンサ装置103は、他のセンサ装置103から受信した情報を、カメラ装置101又は制御装置102に送信することができる。
本実施形態では、センサ装置103は、監視オブジェクトの移動速度の情報を取得する処理を実行することとする。しかし、センサ装置103からセンサ装置103内のセンサから出力された情報を受信した制御装置102が、受信した情報に基づいて、監視オブジェクトの移動速度の情報を取得することとしてもよい。
カメラ装置101、センサ装置103は、監視オブジェクトの監視に利用されるデバイスの一例である。
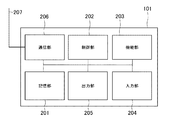
図2は、カメラ装置101のそれぞれのハードウェア構成の一例を示す図である。
カメラ装置101のそれぞれは、記憶部201、制御部202、機能部203、入力部204、出力部205、通信部206を含む。記憶部201、制御部202、機能部203、入力部204、出力部205、通信部206は、カメラ装置101のシステムバスを介して相互に接続されている。
記憶部201は、ROMやRAM等の記憶装置により構成され、各種のプログラムや、無線通信のための通信パラメータ等の各種の設定情報等を記憶する。記憶部201は、ROM、RAMの他に、フレキシブルディスク、ハードディスク、光ディスク、光磁気ディスク、CD−ROM、CD−R、磁気テープ、不揮発性のメモリカード、DVD等の記憶媒体で構成されていてもよい。また、記憶部201は、複数の記憶装置や記憶媒体で構成されることとしてもよい。
制御部202は、CPUやMPU等のプロセッサにより構成され、記憶部201に記憶されたプログラムを実行することによりカメラ装置101全体を制御する。なお、制御部202は、記憶部201に記憶されたプログラムとOS(Operating System)との協働によりカメラ装置101全体を制御するようにしてもよい。また、制御部202は、マルチコア等の複数のプロセッサで構成されることとしてもよい。その場合、制御部202は、複数のプロセッサによりカメラ装置101全体を制御する。また、制御部202は、機能部203を制御する。
また、機能部203は、符号化した映像データに対して、監視オブジェクトの検知や追跡等の映像解析処理を行う。本実施形態では、機能部203は、符号化した映像データに基づいて、監視対象である監視オブジェクトの移動速度の情報を取得する処理を行う。
機能部203は、監視オブジェクトを撮影すると撮影した映像データに対して、監視オブジェクトの動体検知、動体追跡、人体検知、顔認識、物体検知等の映像解析処理を行うことで、監視範囲を移動する監視オブジェクトの監視を行う。機能部203は、撮影した映像データに対して映像解析処理を行うこととするが、記憶部201に記憶されている映像データに対して映像解析処理を行うこともできる。また、機能部203は、通信部206を介して受信された映像データに対して映像解析処理を行うこともできるものとする。
また、機能部203は、制御装置102からの指示に応じて、監視オブジェクトの監視を行う監視処理を開始、又は停止する。
入力部204は、マウス、キーボード、タッチパネル等の入力デバイスで構成され、ユーザーからの各種操作の受付を行う。出力部205は、ディスプレイ、タッチパネル、スピーカー等で構成され、ユーザーに対して各種情報の出力を行う。ここで、出力部205による出力とは、ディスプレイ上への表示や、スピーカーによる音声出力、振動出力等である。タッチパネルのように入力部204と出力部205との両方が、1つのデバイスとして実現されることとしてもよい。
通信部206は、アンテナ207を制御して、無線通信のための無線信号の送受信を行う。カメラ装置101は、通信部206を介して制御装置102、センサ装置103と通信する。
制御部202が、記憶部201に記憶されたプログラムに基づき処理を実行することによって、カメラ装置101の機能及び図6で後述するシーケンス図におけるカメラ装置101の処理等が実現される。
制御装置102のそれぞれは、記憶部301、制御部302、機能部303、入力部304、出力部305、通信部306を含む。記憶部301、制御部302、機能部303、入力部304、出力部305、通信部306は、制御装置102のシステムバスを介して相互に接続されている。
記憶部301は、ROMやRAM等の記憶装置により構成され、各種のプログラムや、無線通信のための通信パラメータ等の各種の設定情報等を記憶する。記憶部301は、ROM、RAMの他に、フレキシブルディスク、ハードディスク、光ディスク、光磁気ディスク、CD−ROM、CD−R、磁気テープ、不揮発性のメモリカード、DVD等の記憶媒体で構成されていてもよい。また、記憶部301は、複数の記憶装置や記憶媒体で構成されることとしてもよい。
制御装置102の機能部303は、カメラ装置101から映像処理前の生の映像データを受信した場合、受信した映像データに対して映像符号化処理を行い、H.264等の設定された形式に符号化する。そして、機能部303は、符号化した映像データに対して、監視オブジェクトの動体検知や動体追跡等の映像解析処理を行う。
ここで、機能部303は、通信部306を介してカメラ装置101等から受信した映像データを符号化し映像解析処理を行うこととするが、記憶部301に記憶されている映像データを符号化し映像解析処理を行うこととしてもよい。
また、機能部303は、例えば、クラウドシステム600からの指示に応じて、監視オブジェクトの監視処理を開始又は停止することとしてもよい。クラウドシステム600は、監視システム100に接続された複数の情報処理装置等により構成されるシステムであって、種々の機能を監視システムに提供するシステムである。機能部303は、例えば、クラウドシステム600からの監視オブジェクトの監視処理の開始の指示に応じて、カメラ装置101、センサ装置103に監視オブジェクトの監視処理の開始を通知することとしてもよい。カメラ装置101は、監視処理の開始を通知されると、撮影した生の映像データを制御装置102に送信する。センサ装置103は、監視処理の開始を通知されると、検出した情報を制御装置102に送信する。そして、機能部303は、カメラ装置101からの生の映像データを符号化した映像データやセンサ装置103からの情報に基づいて、監視オブジェクトの特徴情報を検出することで、監視オブジェクトの監視処理を行う。
また、カメラ装置101は、例えば、クラウドシステム600からの監視オブジェクトの監視処理の開始の指示に応じて、制御装置102に撮影した生の映像データの送信を開始することとしてもよい。また、センサ装置103は、例えば、クラウドシステム600からの監視オブジェクトの監視処理の開始の指示に応じて、有するセンサから出力された情報を、制御装置102に送信することとしてもよい。
本実施形態では、監視オブジェクトが人の歩行速度よりも高速に移動する車両等であることとする。本実施形態では、監視オブジェクトの監視エリアを推定する処理を実行するためのプログラムが、記憶部301に記憶されている。
また、通信部306は、有線通信を行うことで、又は、アンテナ307を介した無線通信を行うことで、外部の装置との間で通信を行う。制御装置102は、通信部306を介してカメラ装置101、センサ装置103と通信する。
本実施形態では、制御装置102は、Bluetooth(登録商標)に準拠する通信を行うものとして説明するが、IEEE802.11シリーズ、UWB、ZigBee(登録商標)、MBOA等の他の無線通信方式に準拠した通信を行うものとしてもよい。
監視システム100の処理について図4、図5、図6、図7を参照して説明する。
図4は、監視システム100の一例を俯瞰した様子を示す図である。監視システム100は、カメラ装置101と制御装置102とセンサ装置103とから構成される監視ユニットを複数含む。監視者601は、監視用制御端末602を利用して、クラウドシステム600に対して、監視対象である監視オブジェクトに関するイベント情報を入力する。監視オブジェクトに関するイベント情報とは、監視オブジェクト自身又は監視オブジェクトの周囲の環境に関する情報等の、監視オブジェクトの移動速度の情報以外の監視オブジェクトの状況を示す情報である。監視オブジェクトに関するイベント情報には、例えば、事故の多発する交差点の位置情報(本実施形態では、領域623の情報)と時間情報、各位置における車両の速度超過条件、監視オブジェクトの特徴を示す情報等がある。クラウドシステム600は、事故の多発する位置の情報(領域623の情報)等の監視オブジェクトに関するイベント情報を、監視システム100に対して通知する。より具体的には、クラウドシステム600は、監視オブジェクトに関するイベント情報を、監視システム100に含まれる制御装置102に対して通知する。クラウドシステム600は、監視オブジェクトに関するイベント情報を、監視オブジェクトの監視を行う監視ユニット内の制御装置102に通知できる。
実線で表示された円形の領域623は、監視システム100が現在監視中である領域である。領域623、及び、点線で表示された円形の領域603は、設定された期間経過後の監視オブジェクトの監視を行う監視ユニットが監視可能な領域である。オブジェクト611は、監視オブジェクトである自動車である。また、オブジェクト612は、監視対象ではない自動車である。オブジェクト622は、制御装置102のうち、オブジェクト611が移動し得ると推定された監視エリアを監視可能な監視ユニットに対応する制御装置である。
図5の状況は、図4の状況から設定された期間経過後の状況である。領域903は、図4の状況から、設定された期間経過後に監視エリアでなくなった領域である。オブジェクト902は、領域903を監視可能な監視ユニットに対応する制御装置である。
図6は、カメラ装置101、制御装置102、センサ装置103、クラウドシステム600、監視者601が利用する監視用制御端末602のメッセージの送受信処理の一例を示すシーケンス図である。
図7は、制御装置102の処理の一例を示すフローチャートである。
監視者601が、監視用制御端末602を用いて、クラウドシステム600に対して、監視条件の登録を指示するメッセージM401を送信する。メッセージM401は、監視オブジェクトに関するイベント情報、監視オブジェクトの特徴情報、監視処理の対象となる領域の情報、監視の応答性が求められるか否かを示す情報等が含まれる。メッセージM401に含まれる監視処理の対象となる領域の情報とは、監視処理の開始の際にどこの領域を監視対象とするかを示す情報である。監視の応答性とは、監視オブジェクトの監視の指示の後、可能な限り素早く監視オブジェクトの監視が開始されることである。本実施形態では、メッセージM401には、監視の応答性が求められることを示す情報が含まれるとする。また、本実施形態では、メッセージM401に含まれる監視処理の対象となる領域の情報は、領域623を示す情報であるとする。また、本実施形態では、メッセージM401に含まれる監視オブジェクトに関するイベント情報は、事故の多発する位置である領域623の情報であるとする。
制御装置102は、メッセージM402を受信すると、受信したメッセージM402に含まれる情報を解析する。
制御装置102は、受信したメッセージM402に含まれる監視の応答性が求められるか否かを示す情報を抽出する。制御装置102は、メッセージM402に監視の応答性が求められることを示す情報が含まれている場合、監視エリアの推定処理を実行することを決定する。また、制御装置102は、メッセージM402に監視の応答性が求められないことを示す情報が含まれている場合、監視エリアの推定処理を実行せず、監視エリアの推定処理の実行をクラウドシステム600に委譲することを決定する。本実施形態では、メッセージM402には、監視の応答性が求められることを示す情報が含まれる。そのため、制御装置102は、監視エリアの推定処理を行うことを決定することになる。
カメラ装置101は、メッセージM403を受信すると、撮影した映像データから、メッセージM403に含まれる監視オブジェクトの特徴情報を、検出する処理を開始する。そして、カメラ装置101は、メッセージM403に含まれる監視オブジェクトの特徴情報を検出すると、検出されたことを示す情報や検出された位置を示す情報等を含むメッセージM405を、制御装置102やクラウドシステム600に送信する。また、カメラ装置101は、メッセージM403に含まれる監視オブジェクトの特徴情報以外に、予め設定された監視オブジェクトの特徴情報を検出してもよい。その場合も、カメラ装置101は、検出されたことを示す情報を示す情報や映像中のどこで検出されたかを示す情報等を含むメッセージM405を、制御装置102やクラウドシステム600に送信する。
センサ装置103は、メッセージM404を受信すると、センサ装置103に含まれるセンサから出力される情報から、メッセージM404に含まれる監視オブジェクトの特徴情報を、検出する処理を開始する。そして、カメラ装置101は、メッセージM404に含まれる監視オブジェクトの特徴情報を検出すると、検出されたことを示す情報、監視オブジェクトの移動速度の情報等を含むメッセージM406を、制御装置102やクラウドシステム600に送信する。また、センサ装置103は、メッセージM404に含まれる監視オブジェクトの特徴情報以外に、予め設定された監視オブジェクトの特徴情報を検出してもよい。その場合も、センサ装置103は、検出されたことを示す情報を示す情報等を含むメッセージM406を、制御装置102やクラウドシステム600に送信する。
カメラ装置101は、撮影した映像データから、メッセージM403に含まれる監視オブジェクト(オブジェクト611)に関する特徴情報を検出した場合、メッセージM405を制御装置102に送信する。また、カメラ装置101は、機能部203を介して取得した監視オブジェクトの移動速度の情報を、メッセージM405に含ませることとする。
センサ装置103は、撮影した映像データから、メッセージM404に含まれる監視オブジェクト(オブジェクト611)に関する特徴情報を検出した場合、メッセージM406を制御装置102に送信する。
次に、制御装置102は、監視エリアの推定処理を実行するか否かを判定する。本実施形態では、メッセージM402には、監視の応答性が求められることを示す情報が含まれるため、監視エリアの推定処理を行うことが決定されている。そのため、制御装置102は、監視エリアの推定処理を実行すると判定する。制御装置102は、監視エリアの推定処理を実行すると判定した場合、メッセージM402に含まれる監視オブジェクトのイベント情報と、メッセージM405又はM406に含まれる監視オブジェクトの移動速度の情報と、に基づいて、次の処理を行う。即ち、制御装置102は、設定された期間経過後に監視オブジェクトが移動し得る領域を推定する。設定された期間経過後に監視オブジェクトが移動し得る領域を推定する処理の詳細は、図7で後述する。
また、制御装置102は、推定した領域を監視可能な監視ユニット以外の監視ユニットに対応する制御装置に、監視処理を実行しないことを指示するメッセージを送信する。
制御装置102は、設定された期間経過後に監視オブジェクトが移動し得る領域として推定した領域に制御装置102に対応する監視ユニットが監視可能な領域が含まれていない場合、監視オブジェクトの監視処理を停止する。制御装置102は、例えば、管理するカメラ装置101やセンサ装置103に対して、監視オブジェクトの特徴情報の検出を停止するよう指示するメッセージを送信する。
次に、制御装置102は、監視処理を停止した旨を示すメッセージM408をクラウドシステム600に対して送信する。その後、制御装置102は、クラウドシステム600から新たなメッセージM409を受信するためにメッセージ待ち状態へ遷移する。
S501において、制御部302は、クラウドシステム600からメッセージM402を受信する。
S502において、制御部302は、S501で受信したメッセージM402にどのような情報が含まれるかを解析する。
S503において、制御部302は、S502での解析の結果に基づいて、監視オブジェクトの監視エリアの推定処理を実行するか否かを判定する。制御部302は、例えば、メッセージM402に監視の応答性が求められることを示す情報が含まれている場合、監視オブジェクトの監視エリアの推定処理を実行すると判定し、S505の処理に進む。また、制御部302は、例えば、メッセージM402に監視の応答性が求められることを示す情報が含まれていない場合、監視オブジェクトの監視エリアの推定処理を実行しないと判定し、S504の処理に進む。
また、監視者601は、監視システム100とクラウドシステム600との間での通信の負担を軽減したい場合等にも、監視用制御端末602を用いて、メッセージM401に監視の応答性が求められることを示す情報を含ませてもよい。
また、監視者601は、例えば、監視オブジェクトが監視開始の指示から監視処理の開始までに監視対象の領域を出ていく可能性がない場合に、監視用制御端末602を用いて、メッセージM401に監視の応答性が求められないことを示す情報を含ませる。これにより、監視システム100は、クラウドシステム600に監視オブジェクトの監視エリアの推定処理を委譲するようになる。監視システム100は、監視エリアの推定処理を実行しないために、監視エリアの推定処理を実行する場合よりも、処理の負担を軽減できる。
また、監視者601は、監視システム100の処理の負担を軽減したい場合等にも、監視用制御端末602を用いて、メッセージM401に監視の応答性が求められないことを示す情報を含ませてもよい。
S505において、制御部302は、S502での解析の結果に基づいて、メッセージM402にカメラ装置101で検出可能な監視オブジェクトの特徴情報が含まれるか否かを判定する。制御部302は、メッセージM402にカメラ装置101で検出可能な監視オブジェクトの特徴情報が含まれると判定した場合、S506の処理に進む。制御部302は、メッセージM402にカメラ装置101で検出可能な監視オブジェクトの特徴情報が含まれていないと判定した場合、S507の処理に進む。
S506において、制御部302は、カメラ装置101に対して監視オブジェクトの監視の開始を指示する指示を示すメッセージM403を送信する。制御部302は、メッセージM403に、メッセージM402から抽出したカメラ装置101で検出可能な監視オブジェクトの特徴情報を含ませる。そして、カメラ装置101は、メッセージM403を受信すると、撮影した映像データから、メッセージM403に含まれる監視オブジェクトの特徴情報を、検出する処理を開始する。
S508において、制御部302は、センサ装置103に対して監視オブジェクトの監視の開始を指示するメッセージM404を送信する。制御部302は、メッセージM404に、メッセージM402から抽出したセンサ装置103で検出可能な監視オブジェクトの特徴情報を含ませる。そして、センサ装置103は、メッセージM404を受信すると、センサ部から出力された情報に基づいて、メッセージM404に含まれる監視オブジェクトの特徴情報を、検出する処理を開始する。
S510において、制御部302は、S509で受信したメッセージM405又はM406に含まれる情報を抽出することで、S509で受信したメッセージを解析する。
S511において、制御部302は、S503と同様の処理で、監視オブジェクトの監視エリアの推定処理を実行するか否かを判定する。また、制御部302は、S503での判定結果に基づいて、監視オブジェクトの監視エリアの推定処理を実行するか否かを判定してもよい。制御部302は、監視オブジェクトの監視エリアの推定処理を実行すると判定した場合、S512の処理に進み、監視オブジェクトの監視エリアの推定処理を実行しないと判定した場合、S517の処理に進む。
制御部302は、例えば、以下のようにして、監視オブジェクトの監視エリアを推定する。制御部302は、メッセージM405又はM406から抽出した監視オブジェクトの位置の情報に基づいて、監視オブジェクトの現在の位置を特定する。そして、制御部302は、メッセージM405又はM406から抽出した監視オブジェクトの移動速度の情報に基づいて、特定した位置から、その移動速度以下の速度で設定された期間のうちに移動可能な領域を特定する。本実施形態では、制御部302は、メッセージM402から、現在監視中である領域623が事故の多発する領域であることを示す情報を取得している。領域623で事故が発生した場合、監視オブジェクトが領域623から移動することができなくなる場合がある。このような場合に備えて、制御部302は、監視オブジェクトの移動速度以下の速度で設定された期間のうちに移動可能な領域に加えて、現在監視している領域623についても、設定された期間経過後の監視エリアとして決定する。即ち、制御部302は、監視オブジェクトの移動速度以下の速度で移動し得る領域と、現在監視中である領域623と、を合わせた領域を、設定された期間経過後の監視オブジェクトの監視エリアとして推定する。このように、制御部302は、監視オブジェクトに関するイベント情報を利用することで、より適切に監視エリアを推定できる。
S514において、制御部302は、S512で推定した監視エリア内の領域を監視可能な監視ユニットを特定する。制御部302は、例えば、予め記憶部301に記憶されている監視システム内の各監視ユニットの監視可能な領域の情報に基づいて、512で推定した監視エリア内の領域を監視可能な監視ユニットを特定する。即ち、制御部302は、512で推定した監視エリア内の領域を監視可能な監視ユニットに含まれるカメラ装置101、センサ装置103を、設定された期間経過後に監視オブジェクトの監視に利用されるデバイスとして決定する。制御部302は、特定した監視ユニットに対応する制御装置に対して、監視オブジェクトの監視を指示するメッセージM407を送信する。制御部302は、メッセージM407に、メッセージM402に含まれていた、監視オブジェクトに関するイベント情報、監視オブジェクトの特徴情報等を含ませる。また、制御部302は、S512で推定した領域を監視可能な監視ユニット以外の監視ユニットに対応する制御装置に、監視処理を実行しないことを指示するメッセージを送信する。
S516において、制御部302は、監視オブジェクトの監視処理を停止する。制御部302は、例えば、管理するカメラ装置101やセンサ装置103に対して、監視オブジェクトの特徴情報の検出を停止するよう指示するメッセージを送信することで、監視オブジェクトの監視処理を停止する。
S517において、制御部302は、監視処理を停止した旨を示すメッセージM408をクラウドシステム600に対して送信し、S501の処理に進む。
例えば、S501で制御部302が受信したメッセージM402に、監視オブジェクトに関するイベント情報として、道路の形状や建物の形状を示す地図の情報が含まれていることとする。監視オブジェクトは、現在存在する位置から任意の方向に移動することができるとは限らない。そのため、制御部302は、現在存在する位置から任意の方向に移動することができることを前提として、監視オブジェクトの監視エリアを精度良く推定することは困難である。そこで、制御部302は、監視オブジェクトが移動可能な範囲を示す地図の情報に基づいて、より精度よく監視オブジェクトの監視エリアを推定できる。監視オブジェクトは、建物の領域を移動できず、道路の領域のみ移動可能である場合、監視オブジェクトは、道路上にしか存在し得ないこととなる。
道路の形状や建物の形状を示す地図の情報は、監視オブジェクトが存在する地形の情報である地形情報の一例である。
制御部302は、例えば、メッセージM405又はM406から抽出した監視オブジェクトの位置の情報に基づいて、監視オブジェクトの現在の位置を特定する。そして、制御部302は、メッセージM402から抽出した監視オブジェクトの制限速度の情報に基づいて、特定した位置から、その制限速度以下の速度で設定された期間のうちに移動可能な領域を特定する。制御部302は、特定した領域を、設定された期間経過後の監視オブジェクトの監視エリアとして推定する。
制御部302は、例えば、メッセージM405又はM406から抽出した監視オブジェクトの位置の情報に基づいて、監視オブジェクトの現在の位置を特定する。そして、制御部302は、メッセージM402から抽出した道路の進行方向の情報に基づいて、特定した位置に存在する監視オブジェクトが進行可能な方向を特定する。例えば、制御部302は、監視オブジェクトが一方通行の道路上に存在している場合、監視オブジェクトが前方にしか進行できないことを特定する。そして、制御部302は、監視オブジェクトが現在存在している位置から、その道路上で監視オブジェクトの前方に位置する領域を、設定された期間経過後の監視オブジェクトの監視エリアとして推定する。また、制御部302は、現在の監視オブジェクトの位置から、監視オブジェクトの移動速度以下の速度で設定された期間内に移動可能な監視オブジェクトの前方の領域を、監視オブジェクトの監視エリアとして推定してもよい。このように、制御部302は、道路の進行方向の情報に加えて、監視オブジェクトの移動速度の情報を利用することで、より精度よく監視オブジェクトの監視エリアを推定できる。
道路における制限速度や進行方向の情報は、監視オブジェクトに課せられる規則の情報である規則情報の一例である。
監視オブジェクトが自動車であり、道路が一車線しかない場合、監視オブジェクトが前方の自動車を追い抜くことはない。そこで、制御部302は、例えば、現在監視中の領域から、監視オブジェクトの前方のオブジェクトが取得した監視オブジェクトの前方のオブジェクトの移動速度で到達可能な地点までの領域を、監視オブジェクトの移動し得る領域として推定してもよい。
監視オブジェクトの周囲とは、例えば、監視オブジェクトを中心とした設定された半径(例えば、100m等)の円形の領域のことである。また、監視オブジェクトの周囲は、監視オブジェクトを監視中の映像処理ユニットが監視可能な領域であることとしてもよい。
監視オブジェクトが自動車である場合、監視オブジェクトの周囲に渋滞が発生している場合、監視オブジェクトがほぼ進むことができない。そこで、制御部302は、現在監視中の領域を、監視オブジェクトの移動し得る領域として推定してもよい。
また、例えば、カメラ装置101やセンサ装置103が、監視オブジェクトの周囲にどれだけ信号機があるかを検出して、検出した信号機の数の情報をメッセージM405、M406に含ませることとする。その場合、制御部302は、メッセージM405、M406から監視オブジェクトの周囲の信号機の数の情報を、監視オブジェクトに関するイベント情報として取得する。そして、制御部302は、取得した監視オブジェクトの周囲の信号機の数の情報に基づいて、監視オブジェクトの監視エリアを推定する。
監視オブジェクトが自動車である場合、監視オブジェクトの周囲に信号機が多いほど、監視オブジェクトが停止することが増加する。そこで、制御部302は、例えば、監視オブジェクトの移動速度で移動可能な領域の大きさを、信号機の数に応じて、信号機の数が多いほど狭くなるように補正した領域を、監視エリアとして推定してもよい。
例えば、制御部302は、地図情報と、制限速度の情報と、を監視オブジェクトに関するイベント情報として取得したとする。その場合、制御部302は、例えば、以下のような処理を行う。即ち、制御部302は、地図情報に基づいて、監視オブジェクトが移動し得る道路の領域を特定し、制限速度の情報に基づいて、特定した道路の領域上で、設定された期間内に監視オブジェクトが移動し得る領域を特定する。そして、制御部302は、特定した領域を、監視オブジェクトの監視エリアとして推定することとなる。
このように、制御部302は、複数のイベント情報に基づいて、より精度よく監視オブジェクトの監視エリアを推定できる。
また、本実施形態では、監視の応答性が求められるとして、監視オブジェクトが移動し得る領域である監視エリアを推定する処理を、制御装置102が実行することとした。これにより、監視システム100は、クラウドシステム600に処理を委譲する必要がなく、クラウドシステム600との間でのメッセージのやり取りを行うための通信負担を軽減できる。
本実施形態では、センサ装置103は、メッセージM404に含まれる特徴情報を検出することとしたが、センサ装置103に含まれるセンサから出力される情報を逐次、制御装置102やクラウドシステム600に送信することとしてもよい。その場合、制御装置102やクラウドシステム600は、センサ装置103に含まれるセンサから出力された情報から、監視オブジェクトの特徴情報を検出することとなる。
(本実施形態の処理の概要)
実施形態1では、監視システムが歩行者等よりも高速な自動車を監視する場合の処理について説明した。本実施形態では、監視システムが自動車よりも低速な歩行者を監視する場合の処理について説明する。本実施形態の監視システム100のシステム構成、監視システム100の各システム構成要素のハードウェア構成及び機能構成は、実施形態1と同様である。
本実施形態では、監視対象が歩行者であり、自動車等に比べて低速の移動速度が想定されることから、監視の応答性が要求されないとする。そこで、制御装置102は、クラウドシステム600に、監視オブジェクトの監視エリアの推定処理を委譲し、クラウドシステム600が監視オブジェクトの監視エリアの推定処理を実行する。
制御部302が、記憶部301に記憶されたプログラムに基づき処理を実行することによって、制御装置102の機能及び図8で後述するシーケンス図における制御装置102の処理、図7のフローチャートの処理等が実現される。
図8は、カメラ装置101、制御装置102、センサ装置103、クラウドシステム600、監視者601が利用する監視用制御端末602のメッセージの送受信処理の一例を示すシーケンス図である。
図9は、監視システム100の一例を俯瞰した様子を示す図である。
オブジェクト801は、監視オブジェクトである歩行者(人間)である。領域802は、現在監視中のオブジェクト801の監視エリアである。オブジェクト803、813は、センサ装置103に含まれるセンサ装置であり、本実施形態では、設定された間隔で配置される無線センサ装置(ビーコン受信機)である。領域823は、推定された設定された期間経過後のオブジェクト801の監視エリアである。オブジェクト822は、制御装置102のうち、領域823を監視可能な監視ユニットに対応する制御装置である。
図7、8を用いて、制御装置102が、センサ装置103を用いて歩行者の監視を実施する際の処理を説明する。
監視者601が、実施形態1と同様に、監視用制御端末602を用いて、クラウドシステム600に対して、監視条件の登録を指示するメッセージM401を送信する。メッセージM401には、実施形態1と同様に、監視オブジェクト(オブジェクト801)に関するイベント情報、監視オブジェクトの特徴情報、監視処理の対象となる領域の情報、監視の応答性が求められるか否かを示す情報等が含まれる。本実施形態では、メッセージM401には、監視の応答性が求められないことを示す情報が含まれる。
クラウドシステム600は、送信されたメッセージM401に含まれる監視処理の対象となる領域の情報を抽出する。クラウドシステム600は、メッセージM401から、監視処理の対象となる領域の情報を抽出する。そして、クラウドシステム600は、監視システム100に含まれる監視ユニットのうち、抽出した領域を監視可能な監視ユニットを特定し、特定した監視ユニットに対応する制御装置102に対して、メッセージM402を送信する。クラウドシステムは、メッセージM402に、メッセージM401に含まれる監視オブジェクトに関するイベント情報、監視オブジェクトの特徴情報、監視の応答性が求められるか否かを示す情報等を含ませる。
S502において、制御部302は、S501で受信したメッセージM402にどのような情報が含まれるかを解析する。
S503において、制御部302は、S502での解析の結果に基づいて、監視オブジェクトの監視エリアの推定処理を実行するか否かを判定する。制御部302は、例えば、メッセージM402に監視の応答性が求められることを示す情報が含まれている場合、監視オブジェクトの監視エリアの推定処理を実行すると判定し、S505の処理に進む。また、制御部302は、例えば、メッセージM402に監視の応答性が求められることを示す情報が含まれていない場合、監視オブジェクトの監視エリアの推定処理を実行しないと判定し、S504の処理に進む。本実施形態では、メッセージM402には、監視の応答性が求められないことを示す情報が含まれているため、制御部302は、監視オブジェクトの監視エリアの推定処理を実行しないと判定し、S504の処理に進む。
S505において、制御部302は、S502での解析の結果に基づいて、メッセージM402にカメラ装置101で検出可能な監視オブジェクトの特徴情報が含まれるか否かを判定する。制御部302は、メッセージM402にカメラ装置101で検出可能な監視オブジェクトの特徴情報が含まれると判定した場合、S506の処理に進む。制御部302は、メッセージM402にカメラ装置101で検出可能な監視オブジェクトの特徴情報が含まれていないと判定した場合、S507の処理に進む。本実施形態では、メッセージM402にカメラ装置101で検出可能な監視オブジェクトの特徴情報が含まれないとする。そのため、制御部302は、メッセージM402にカメラ装置101で検出可能な監視オブジェクトの特徴情報が含まれていないと判定し、S507の処理に進む。
S508において、制御部302は、センサ装置103に対して監視オブジェクトの監視の開始を指示するメッセージM701を送信する。制御部302は、メッセージM701に、メッセージM402から抽出したセンサ装置103で検出可能な監視オブジェクトの特徴情報を含ませる。そして、センサ装置103は、メッセージM701を受信すると、センサ部から出力された情報に基づいて、メッセージM404に含まれる監視オブジェクトの特徴情報を検出する処理を開始する。センサ装置103は、メッセージM404に含まれる監視オブジェクトの特徴情報を検出すると、検出したことを示す情報、検出された位置の情報、監視オブジェクトの移動速度等の情報を含むメッセージM702を制御装置102に送信する。
S509において、制御部302は、センサ装置103からメッセージM702を受信したか否かを判定する。制御部302は、メッセージM702を受信したと判定した場合、S510の処理に進む。制御部302は、メッセージM702を受信していないと判定した場合、S509の処理を繰り返す。
例えば、それぞれ設定された間隔で配置されている複数のセンサ装置103で構成されるセンサーネットワークが、近接する無線通信のビーコン情報に含まれる固有のIDで、監視オブジェクトを検出することとしてもよい。
例えば、このようなセンサーネットワークとしては、以下のものがある。即ち、ZigBee、Z−Wave(登録商標)、ANT(登録商標)、Wi−SUN、BLE(Bluetooth Low Energy)、Wi−Fi(登録商標)、IEEE802.11ah等がある。
S511において、制御部302は、監視オブジェクトの監視エリアの推定処理を実行するか否かを判定する。本実施形態では、制御装置102が監視エリアの推定処理を実行しない。そのため、制御部302は、監視オブジェクトの監視エリアの推定処理を実行しないと判定し、S517の処理に進む。
S517において、制御部302は、クラウドシステム600に対して、監視オブジェクトの特徴情報が検出された旨を示すメッセージM703を送信する。制御部302は、メッセージM703に、S509で受信したと判定したメッセージM702に含まれる監視オブジェクトの位置の情報、監視オブジェクトの移動速度の情報、検出の際の時刻の情報等を含ませる。
その後、制御部302は、S501の処理に進み、クラウドシステム600から、新たな監視処理を指示するメッセージM704を受信するために、メッセージ待ち状態へ遷移する。
クラウドシステム600は、例えば、監視オブジェクトに固有の無線ビーコン情報を受信している2つのセンサ装置103間の電界強度のピーク時の時間差等に基づいて、監視オブジェクトの移動速度を取得する。
クラウドシステム600は、監視オブジェクトのイベント情報、監視オブジェクトの移動速度の情報に基づいて、設定された期間経過後の監視オブジェクトの監視エリアを推定する。監視エリアの推定の方法は、実施形態1のS512の説明等で説明した方法と同様である。また、クラウドシステム600は、監視オブジェクトの移動速度の情報に依らず、監視オブジェクトのイベント情報に基づいて、設定された期間経過後の監視オブジェクトの監視エリアを推定してもよい。その場合の監視エリアの推定の方法も、実施形態1で説明した方法と同様である。
クラウドシステム600は、現在監視中の領域に対応する監視ユニットに対応する制御装置102に、監視オブジェクトの監視の継続又は停止を指示するメッセージM705を送信する。
ここで、クラウドシステム600は、メッセージM705に、カメラ装置101により検出可能な監視オブジェクトの特徴情報、監視の応答性が要求されない情報等を含ませたとする。
制御部302は、S501でメッセージM705を受信し、S502で、メッセージM705に含まれる情報を抽出する。制御部302は、S503で、メッセージM705に監視の応答性が要求されない情報が含まれるため、監視エリアの推定処理を実行しないと判定し、S504で、クラウドシステム600に監視エリアの推定処理を委譲することを示すメッセージを送信する。
制御部302は、メッセージM705にセンサ装置103により検出可能な監視オブジェクトの特徴情報が含まれている場合、S508で、センサ装置103に対してその特徴情報を含ませた監視オブジェクトの監視を指示するメッセージM707を送信する。
そして、制御装置102は、S509の処理に進み、カメラ装置101又はセンサ装置103からのメッセージを待機する。制御装置102は、カメラ装置101又はセンサ装置103からのメッセージを受信すると、S517で受信したメッセージに含まれる情報を含ませたメッセージをクラウドシステム600に送信し、S501の処理に進む。
実施形態1、2では、制御部302は、クラウドシステム600から送信されたメッセージM402に含まれる監視の応答性が求められるか否かの情報に基づいて、監視の応答性が求められるか否かを判定した。
しかし、制御部302は、例えば、監視オブジェクトの移動速度の情報に基づいて、監視の応答性が求められるか否かを判定してもよい。例えば、制御部302は、監視オブジェクトの移動速度が設定された閾値以上である場合、監視の応答性が求められると判定し、監視オブジェクトの移動速度が設定された閾値未満である場合、監視の応答性が求められないと判定してもよい。
また、制御部302は、例えば、カメラ装置101やセンサ装置103からの情報に基づいて、監視オブジェクトの周囲で渋滞が発生しているか否かを把握した場合、以下の処理を行うこととしてもよい。即ち、制御部302は、監視オブジェクトの周囲で渋滞が発生しているか否かに基づいて、監視の応答性が求められるか否かを判定してもよい。例えば、制御部302は、監視オブジェクトの周囲で渋滞が発生している場合、監視オブジェクトの移動が制限されるため、監視の応答性が求められないと判定してもよい。また、制御部302は、監視オブジェクトの周囲で渋滞が発生していない場合、監視オブジェクトの移動が制限されないため、監視の応答性が求められると判定してもよい。
そして、制御部302は、監視の応答性が求められる場合、監視オブジェクトの監視エリアの推定処理を実行し、監視の応答性が求められない場合、監視オブジェクトの監視エリアの推定処理をクラウドシステム600に委譲することとなる。
しかし、センサ装置103は、実施形態1で説明したように、カメラ装置101により撮影された映像データに基づいて、監視オブジェクトの移動速度を取得してもよい。また、センサ装置103は、3点測位方法や監視対象の移動体の位置を一意に識別可能な情報等に基づいて、監視オブジェクトの移動速度を取得してもよい。センサ装置103は、例えば、近距離無線通信手段であるRFID(Radio Frequency Identifier)、NFC(Near Field Communication)等で、監視オブジェクトの位置を検出する。そして、センサ装置103は、検出した監視オブジェクトの位置に基づいて、監視オブジェクトの移動速度を取得してもよい。
実施形態1、2では、センサ装置103がBluetoothに準拠しているものとしている。しかし、センサ装置103は、IEEE802.11シリーズ、UWB、ZigBee、MBOA等の他の無線通信方式に準拠していることとしてもよい。MBOAは、Multi Band OFDM Allianceの略である。また、UWBには、ワイヤレスUSB、ワイヤレス1394、WINET等が含まれる。
しかし、制御装置102又はクラウドシステム600は、監視オブジェクトが有する通信キャリア等の位置情報のデータベースの情報をクラウドシステム600経由で取得することで、監視オブジェクトの位置を特定することとしてもよい。即ち、クラウドシステム600が監視オブジェクトの位置を特定し、制御装置102又はクラウドシステム600は、クラウドシステム600により特定された監視オブジェクトの位置の情報に基づいて、監視オブジェクトの監視エリアを推定してもよい。
しかし、クラウドシステム600の処理の負担を軽減したい場合やクラウドシステム600と監視システム100との間の通信負担を軽減したい場合等には、クラウドシステム600は、以下のようにしてもよい。即ち、クラウドシステム600は、監視の応答性が要求される情報を含めたメッセージM402を、制御装置102に送信することで、制御装置102に対して、監視エリアの推定処理の実行を指示するようにしてもよい。
本発明は、上述の実施形態の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサがプログラムを読み出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
以上、本発明の好ましい実施形態について詳述したが、本発明は実施形態1〜2に限定されず、その要旨の範囲内で種々の変形及び変更が可能である。
例えば、上述した監視システム100の機能構成の一部又は全てをハードウェアとして制御装置102に実装してもよい。
102 制御装置
600 クラウドシステム
Claims (14)
- 監視対象である監視オブジェクトの情報及び当該監視オブジェクトの周囲の環境の情報を取得する取得手段と、
前記取得手段により取得された前記監視オブジェクトの情報及び当該監視オブジェクトの周囲の環境の情報に基づいて、前記監視オブジェクトが移動する領域を推定する推定手段と、
前記推定手段により推定された領域に基づいて、前記監視オブジェクトの監視に利用されるデバイスに前記監視オブジェクトの監視の開始を指示し、前記監視オブジェクトの監視に利用されなくなったデバイスに前記監視オブジェクトの監視の停止を指示する指示手段と、
を有し、
前記推定手段は、監視の応答性が求められる場合、前記推定手段による推定を行い、監視の応答性が求められない場合、前記監視オブジェクトが移動する領域を推定する処理を、クラウドシステムに委譲する委譲手段を更に有することを特徴とするシステム。 - 前記周囲の環境の情報は、前記監視オブジェクトの周囲の地形情報、周囲の規則情報、周囲のオブジェクトの属性情報の少なくとも何れかであることを特徴とする請求項1記載のシステム。
- 前記監視オブジェクトの情報は、前記監視オブジェクトの移動速度の情報であることを特徴とする請求項1又は2記載のシステム。
- 前記システムは、撮像装置とセンサと制御装置とを含むことを特徴とする請求項1乃至3何れか1項記載のシステム。
- 前記取得手段は、前記撮像装置により撮影された画像に基づいて、前記監視オブジェクトの情報を取得する請求項4記載のシステム。
- 前記取得手段は、前記センサから出力された情報に基づいて、前記監視オブジェクトの情報を取得する請求項4記載のシステム。
- 前記取得手段は、前記撮像装置により撮影された画像と前記センサから出力された情報とに基づいて、前記監視オブジェクトの情報を取得する請求項4記載のシステム。
- 複数の前記制御装置はネットワークを介して相互に接続され、前記推定手段は前記制御装置それぞれに実装されている請求項4乃至7何れか1項記載のシステム。
- 前記推定手段は、前記取得手段により取得された前記監視オブジェクトの移動速度の情報以外の当該監視オブジェクトの状況を示す情報と、前記撮像装置により撮影された前記監視オブジェクトの画像に基づいて取得された前記監視オブジェクトの移動速度の情報とに基づいて、前記監視オブジェクトが移動する領域を推定する請求項4乃至8何れか1項記載のシステム。
- 前記推定手段は、前記取得手段により取得された前記監視オブジェクトの移動速度の情報以外の当該監視オブジェクトの状況を示す情報と、前記センサにより検出された前記監視オブジェクトの属性情報に基づいて取得された前記監視オブジェクトの移動速度の情報とに基づいて、前記監視オブジェクトが移動する領域を推定する請求項4乃至8何れか1項記載のシステム。
- 前記取得手段は、クラウドシステムから、前記監視オブジェクトの周囲の環境の情報を取得する請求項1乃至10何れか1項記載のシステム。
- 監視対象である監視オブジェクトの情報及び当該監視オブジェクトの周囲の環境の情報を取得する取得手段と、
前記取得手段により取得された前記監視オブジェクトの情報及び当該監視オブジェクトの周囲の環境の情報に基づいて、前記監視オブジェクトが移動する領域を推定する推定手段と、
前記推定手段により推定された領域に基づいて、前記監視オブジェクトの監視に利用されるデバイスを決定する決定手段と、
前記決定手段により前記監視オブジェクトの監視に利用されるデバイスとして決定されたデバイスに前記監視オブジェクトの監視の開始を指示し、前記決定手段により前記監視オブジェクトの監視に利用されるデバイスとして決定されず前記監視オブジェクトの監視に利用されなくなったデバイスに前記監視オブジェクトの監視の停止を指示する指示手段と、
を有し、
前記推定手段は、監視の応答性が求められる場合、前記推定手段による推定を行い、監視の応答性が求められない場合、前記監視オブジェクトが移動する領域を推定する処理を、クラウドシステムに委譲する委譲手段を更に有する情報処理装置。 - 情報処理方法であって、
監視対象である監視オブジェクトの情報及び当該監視オブジェクトの周囲の環境の情報を取得する取得ステップと、
前記取得ステップで取得された前記監視オブジェクトの情報及び当該監視オブジェクトの周囲の環境の情報に基づいて、前記監視オブジェクトが移動する領域を推定する推定ステップと、
前記推定ステップにおいて推定された領域に基づいて、前記監視オブジェクトの監視に利用されるデバイスを決定する決定ステップと、
前記決定ステップにおいて前記監視オブジェクトの監視に利用されるデバイスとして決定されたデバイスに前記監視オブジェクトの監視の開始を指示し、前記決定ステップにおいて前記監視オブジェクトの監視に利用されるデバイスとして決定されず前記監視オブジェクトの監視に利用されなくなったデバイスに前記監視オブジェクトの監視の停止を指示する指示ステップと、
を含み、
前記推定ステップは、監視の応答性が求められる場合、前記推定ステップによる推定を行い、監視の応答性が求められない場合、前記監視オブジェクトが移動する領域を推定する処理を、クラウドシステムに委譲する委譲ステップを更に含む情報処理方法。 - コンピュータに、
監視対象である監視オブジェクトの情報及び当該監視オブジェクトの周囲の環境の情報を取得する取得ステップと、
前記取得ステップで取得された前記監視オブジェクトの情報及び当該監視オブジェクトの周囲の環境の情報に基づいて、前記監視オブジェクトが移動する領域を推定する推定ステップと、
前記推定ステップにおいて推定された領域に基づいて、前記監視オブジェクトの監視に利用されるデバイスを決定する決定ステップと、
前記決定ステップにおいて前記監視オブジェクトの監視に利用されるデバイスとして決定されたデバイスに前記監視オブジェクトの監視の開始を指示し、前記決定ステップにおいて前記監視オブジェクトの監視に利用されるデバイスとして決定されず前記監視オブジェクトの監視に利用されなくなったデバイスに前記監視オブジェクトの監視の停止を指示する指示ステップと、
を実行させ、
前記推定ステップは、監視の応答性が求められる場合、前記推定ステップによる推定を行い、監視の応答性が求められない場合、前記監視オブジェクトが移動する領域を推定する処理を、クラウドシステムに委譲する委譲ステップを更に含むプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016230028A JP6840518B2 (ja) | 2016-11-28 | 2016-11-28 | システム、情報処理装置、情報処理方法及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016230028A JP6840518B2 (ja) | 2016-11-28 | 2016-11-28 | システム、情報処理装置、情報処理方法及びプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018088584A JP2018088584A (ja) | 2018-06-07 |
| JP2018088584A5 JP2018088584A5 (ja) | 2020-01-16 |
| JP6840518B2 true JP6840518B2 (ja) | 2021-03-10 |
Family
ID=62494637
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016230028A Active JP6840518B2 (ja) | 2016-11-28 | 2016-11-28 | システム、情報処理装置、情報処理方法及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6840518B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7258596B2 (ja) * | 2019-02-25 | 2023-04-17 | i-PRO株式会社 | 捜査支援システムおよび捜査支援方法 |
| CN110113581B (zh) * | 2019-06-13 | 2020-11-06 | 重庆人为本科技发展有限公司 | 一种智慧城市监控系统及方法 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4195991B2 (ja) * | 2003-06-18 | 2008-12-17 | パナソニック株式会社 | 監視映像モニタリングシステム、監視映像生成方法、および監視映像モニタリングサーバ |
| JP4962207B2 (ja) * | 2007-08-10 | 2012-06-27 | 住友電気工業株式会社 | 通信システム、路側通信装置、光ビーコン及び無線通信方法 |
| JP2011141787A (ja) * | 2010-01-08 | 2011-07-21 | Chugoku Electric Power Co Inc:The | 防犯システム |
| JP2015041820A (ja) * | 2013-08-20 | 2015-03-02 | キヤノン株式会社 | 撮像装置及びその制御方法、撮像システム、プログラム |
-
2016
- 2016-11-28 JP JP2016230028A patent/JP6840518B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018088584A (ja) | 2018-06-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109416867B (zh) | 机器人、机器人系统和记录介质 | |
| US10671058B2 (en) | Monitoring server, distributed-processing determination method, and non-transitory computer-readable medium storing program | |
| KR102029656B1 (ko) | 사물인터넷기반 임베디드 방식의 교통신호 자율운영시스템 | |
| JP6967867B2 (ja) | 送電装置およびその制御方法、並びにプログラム | |
| CN110704663B (zh) | 车载装置以及车辆搜索系统 | |
| US10401178B2 (en) | Causing a transition between positioning modes | |
| US20190364399A1 (en) | Control device and method | |
| JP2008217120A (ja) | 通信システム、端末機及び車載機 | |
| JP6840518B2 (ja) | システム、情報処理装置、情報処理方法及びプログラム | |
| CN110998687B (zh) | 控制系统以及控制方法 | |
| JP2007233478A (ja) | 接近報知システム、並びにそれに用いる車載機及び携帯端末 | |
| JP6392802B2 (ja) | 無線通信装置、位置情報通知システムおよび位置情報送信方法、並びにコンピュータ・プログラム | |
| JP6016383B2 (ja) | 通信装置、通信装置の制御方法、プログラム | |
| KR20210082321A (ko) | 인공지능형 모빌리티 디바이스 제어 방법 및 인공지능형 모빌리티를 제어하는 지능형 컴퓨팅 디바이스 | |
| US20160351054A1 (en) | Power conservation in traffic safety applications | |
| EP3193529B1 (en) | Communication apparatus, method of controlling the same, and communication system | |
| EP3138090B1 (en) | Pedestrian detection | |
| JP6022926B2 (ja) | 端末装置および無線通信システム | |
| JP6915787B2 (ja) | 通信制御装置、通信システム、通信方法、およびプログラム | |
| JP2010118895A (ja) | 車車間通信装置 | |
| JP7388543B2 (ja) | 無線通信システム、基地局制御装置、避難誘導方法及び基地局制御プログラム | |
| JPWO2019239471A1 (ja) | 運転支援装置、運転支援システムおよび運転支援方法 | |
| EP2824965A1 (en) | Communication device and communication system | |
| WO2023152967A1 (ja) | 情報処理システム、情報処理装置、情報処理方法及びプログラム | |
| JP7332303B2 (ja) | 撮像装置、制御プログラム及び撮像装置の動作方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191127 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191127 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200702 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200707 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200902 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201110 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201228 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210119 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210217 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6840518 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |