JP6830375B2 - ジンバル装置、姿勢検出装置、測量装置、測量用ポール、及び飛行移動体 - Google Patents
ジンバル装置、姿勢検出装置、測量装置、測量用ポール、及び飛行移動体 Download PDFInfo
- Publication number
- JP6830375B2 JP6830375B2 JP2017032977A JP2017032977A JP6830375B2 JP 6830375 B2 JP6830375 B2 JP 6830375B2 JP 2017032977 A JP2017032977 A JP 2017032977A JP 2017032977 A JP2017032977 A JP 2017032977A JP 6830375 B2 JP6830375 B2 JP 6830375B2
- Authority
- JP
- Japan
- Prior art keywords
- electrical connection
- axis
- gimbal
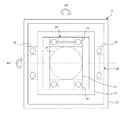
- motor
- inner frame
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Landscapes
- Arrangements For Transmission Of Measured Signals (AREA)
Description
2 ジンバル装置
3 外部装置
10 傾斜検出ユニット(水平検出部)
11 部品支持部
12 内フレーム
13 外フレーム
20 チルトセンサ
21 加速度センサ
22 センサ制御部(姿勢検出部)
30 第1のモータ
31 第1のエンコーダ
32 第2のモータ
33 第2のエンコーダ
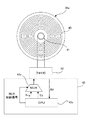
34 内側電気接続部
35 外側電気接続部
34a、34b、35a、35b 円盤ユニット
40 給電コイル(無線給電部)
41 光ファイバ(無線通信部)
Claims (9)
- 所定の部品を少なくとも2軸において回転自在に支持するジンバル装置であって、
前記部品を支持する部品支持部と、
前記部品支持部を第1の軸を回転軸として回転自在に支持する内フレームと、
前記内フレームを第2の軸を回転軸として回転自在に支持する外フレームと、
前記部品支持部と前記内フレームとの間にて、前記第1の軸回りの回転を許容しつつ非接触な電気的接続を行う内側電気接続部と、
前記内フレームと前記外フレームとの間にて、前記第2の軸回りの回転を許容しつつ非接触な電気的接続を行う外側電気接続部と、
前記内側電気接続部及び前記外側電気接続部を介して、前記部品から前記外フレームまで敷設された配線と、
を備え、
前記内側電気接続部及び前記外側電気接続部は、回転軸と同軸上にて先端が対向した一対の光ファイバを含む、ジンバル装置。 - 前記内側電気接続部及び前記外側電気接続部は、相互誘電作用を利用した無線給電部を含む請求項1記載のジンバル装置。
- 前記内フレームに対して前記部品支持部を前記第1の軸回りに回転駆動する第1のモータと、
前記外フレームに対して前記内フレームを前記第2の軸回りに回転駆動する第2のモータと、を備え、
前記第1のモータ及び第2のモータへの配線は、前記部品から前記外フレームまで敷設された配線のうち前記内フレームに沿って敷設される部分に含まれる請求項1または2に記載のジンバル装置。 - 前記第1のモータ及び前記第2のモータは、いずれもステータが前記内フレームに設けられている請求項3に記載のジンバル装置。
- 前記請求項1から4のいずれか一項に記載のジンバル装置を有し、
さらに、前記部品として前記部品支持部に設けられ、水平を検出する水平検出部と、
前記部品支持部に対する前記内フレームの前記第1の軸回りの角度を検出する第1のエンコーダと、
前記内フレームに対する前記外フレームの前記第2の軸回りの角度を検出する第2のエンコーダと、
前記第1のモータ及び第2のモータを駆動して、前記水平検出部により水平が検出される状態として、第1のエンコーダ及び第2のエンコーダにより検出された角度を取得することで、外フレームの水平に対する姿勢を検出する姿勢検出部と、
を備える姿勢検出装置。 - 前記請求項5の姿勢検出装置と、
光波を用いて測距する光波距離計と、
前記光波距離計により測距した測距情報と、前記姿勢検出装置により検出される姿勢情報から測量結果を出力する測量制御部と、
を備える測量装置。 - 前記請求項5の姿勢検出装置と、
衛星信号により位置情報を得る測位部と、
前記測位部により測位した位置情報と、前記姿勢検出装置により検出される姿勢情報から測量結果を出力する測量制御部と、
を備える測量装置。 - 前記請求項1から4のいずれ一項に記載のジンバル装置と、
前記ジンバル装置の部品支持部に連結され、自重により鉛直方向に垂下する竿部材と、
前記竿部材に設けられた反射プリズムと、
を備える測量用ポール。 - 前記請求項1から4のいずれ一項に記載のジンバル装置と、
前記ジンバル装置の外フレームに連結され、飛行可能な飛行機構と、
前記ジンバル装置の部品支持部に設けられ、撮影を行う撮影部と、
を備える飛行移動体。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017032977A JP6830375B2 (ja) | 2017-02-24 | 2017-02-24 | ジンバル装置、姿勢検出装置、測量装置、測量用ポール、及び飛行移動体 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017032977A JP6830375B2 (ja) | 2017-02-24 | 2017-02-24 | ジンバル装置、姿勢検出装置、測量装置、測量用ポール、及び飛行移動体 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018138874A JP2018138874A (ja) | 2018-09-06 |
| JP6830375B2 true JP6830375B2 (ja) | 2021-02-17 |
Family
ID=63450850
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017032977A Active JP6830375B2 (ja) | 2017-02-24 | 2017-02-24 | ジンバル装置、姿勢検出装置、測量装置、測量用ポール、及び飛行移動体 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6830375B2 (ja) |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002281694A (ja) * | 2001-03-16 | 2002-09-27 | Tamagawa Seiki Co Ltd | 空間安定装置 |
| US6763595B1 (en) * | 2002-06-21 | 2004-07-20 | Pls - Pacific Laser Systems | Laser-based tool for indicating level, plumb and square |
| JP4284496B2 (ja) * | 2003-01-14 | 2009-06-24 | 多摩川精機株式会社 | 空間安定装置 |
| JP5385604B2 (ja) * | 2008-12-25 | 2014-01-08 | 株式会社トプコン | 光信号伝送装置 |
| JP5707209B2 (ja) * | 2011-04-08 | 2015-04-22 | 株式会社トプコン | 測量用ポール |
| JP6151902B2 (ja) * | 2012-09-20 | 2017-06-21 | 株式会社トプコン | 写真計測用カメラ及び航空写真装置 |
| JP6541365B2 (ja) * | 2015-02-16 | 2019-07-10 | 株式会社トプコン | 姿勢検出装置及びデータ取得装置 |
-
2017
- 2017-02-24 JP JP2017032977A patent/JP6830375B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018138874A (ja) | 2018-09-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9609282B2 (en) | Camera for photogrammetry and aerial photographic device | |
| EP3205977B1 (en) | Flight plan preparing method and flying vehicle guiding system | |
| JP5882951B2 (ja) | 飛行体誘導システム及び飛行体誘導方法 | |
| JP6326237B2 (ja) | 測定システム | |
| CN108443680B (zh) | 一种移动装置、移动装置控制系统及控制方法 | |
| CN111226090A (zh) | 具有改进的横滚角测量的激光跟踪器 | |
| US10800344B2 (en) | Aerial photogrammetric device and aerial photogrammetric method | |
| CN104011502B (zh) | 自动水准测量 | |
| JP2015113100A (ja) | 情報取得システム、無人飛行体制御装置 | |
| JP6577083B2 (ja) | 測定システム | |
| US10481604B2 (en) | High accuracy remote coordinate machine | |
| CN107246869A (zh) | 一种捷联式微机械惯性导航系统 | |
| CN110869787A (zh) | 磁传感器校准方法以及可移动平台 | |
| JP6830375B2 (ja) | ジンバル装置、姿勢検出装置、測量装置、測量用ポール、及び飛行移動体 | |
| JP6763749B2 (ja) | 移動体制御システム及び移動体 | |
| JP2018054408A (ja) | 測量装置 | |
| JP2018138922A (ja) | 測定システム | |
| CA2783767C (en) | Measuring device | |
| RU2544295C1 (ru) | Гирокомпас | |
| JP2019117993A (ja) | 無線制御装置及び無線制御システム | |
| JPH0984161A (ja) | 固定局と移動局との双方向無線通信方法 | |
| WO1998046967A2 (en) | Relative rate sensor for control moment gyroscopes |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191202 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20201002 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20201027 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201217 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210105 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210126 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6830375 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |