図4には、基台401から延びるアーム400を備える手術ロボットが示されている。当該アームは、剛体のリム402を複数有している。これらのリムは、回転ジョイント403で連結されている。最も近位側のリム402aは、ジョイント403aによって前記基台に連結されている。当該リムと残りのリムとは、さらなるジョイント403によって次々と連結されている。好適には、リスト404が、4つの別個の回転ジョイントで構成されている。リスト404は、1つのリム(402b)を前記アームの最も遠位側のリム(402c)に連結している。最も遠位側のリム402cは、手術器具406のためのアタッチメント405を保持している。前記アームの各ジョイント403は、当該各ジョイントで回転運動を生じさせるように作動され得る1つ以上のモータ407と、当該ジョイントでの現在の形態および/または荷重に関する情報を提供する1つ以上の位置および/またはトルクセンサ408とを具備している。好適には、前記モータは、重量分布を良好にするために、当該モータによって動作が駆動される前記ジョイントの近傍に配置されている。図4では、分かり易くするために、これらのモータ及びセンサの一部しか描かれていない。前記アームは、一般的には、本願の出願人による同時継続中の国際出願PCT/GB2014/053523に記載されているものであり得る。
前記アームは、器具406とインターフェース連結するためのアタッチメント405で終端する。好適には、器具406は、図2に関して説明した構成のものである。当該器具の直径は、8mm未満である。好適には、当該器具の直径は、5mmである。当該器具の直径は、5mm未満とされてもよい。当該器具の直径は、シャフトの直径であり得る。当該器具の直径は、関節部のプロファイルの直径であり得る。好適には、当該関節部のプロファイルの直径は、前記シャフトの直径と合致するか又は前記シャフトの直径よりも幅狭である。アタッチメント405は、前記器具の関節部を駆動する駆動アセンブリを具備している。駆動アセンブリインターフェースにおける可動なインターフェースエレメントは、前記ロボットアームからの駆動を前記器具へと伝達するために、器具インターフェースにおける対応する可動なインターフェースエレメントと機械的に係合する。典型的な手術時には、器具が別の器具に数回取り替えられる。よって、前記器具は、手術のあいだ前記ロボットアームへと取付け可能かつ前記ロボットアームから取外し可能である。前記駆動アセンブリインターフェースおよび前記器具インターフェースは、当該駆動アセンブリインターフェースと当該器具インターフェースとが互いとの係合状態に移行させられるときに当該駆動アセンブリインターフェースと当該器具インターフェースとの位置合わせを支援する構成を有しており、これにより、ユーザが行わなければならない当該駆動アセンブリインターフェースと当該器具インターフェースとの位置合わせの精度が低くてもよくなる。
器具406は、手術を実行するためのエンドエフェクタを備える。当該エンドエフェクタは、任意の適切な構成のものであれば、どのような構成のものであってもよい。例えば、当該エンドエフェクタは、平らなジョー、凸凹状のジョー、グリッパー、一対の鋏、縫合用の針、カメラ、レーザ、ナイフ、ステープラー、焼灼器、吸引器等であり得る。前記器具は、図2に関して説明したように前記器具シャフトと前記エンドエフェクタとの間に関節部を備える。当該関節部は、前記エンドエフェクタが前記器具の前記シャフトに対して動くことを可能にする複数のジョイントを含む。前記関節部内のこれらのジョイントは、ケーブルなどの駆動エレメントにより作動される。これらの駆動エレメントは、前記器具シャフトの反対側の端部において前記器具インターフェースの前記インターフェースエレメントへと固定されている。つまり、前記ロボットアームは、駆動を前記エンドエフェクタへと次のようにして伝達する:駆動アセンブリインターフェースエレメントの運動が器具インターフェースエレメントを動かし、当該器具インターフェースエレメントが駆動エレメントを動かし、当該駆動エレメントが前記関節部のジョイントを動かし、当該ジョ
イントが前記エンドエフェクタを動かす。
前記ロボットアームには、前記モータのコントローラ、トルクセンサのコントローラ及びエンコーダのコントローラが分散配置されている。これらのコントローラは、通信バスを介して制御部409に接続されている。接続部409は、プロセッサ410およびメモリ411を含む。メモリ411は、モータ407の動作を制御してアーム400を本明細書で説明する様式で動作させるための、前記プロセッサにより実行可能なソフトウェアを、非過渡的に記憶する。具体的に述べると、当該ソフトウェアはプロセッサ410を制御して、センサ408からの及び手術医指令インターフェース412からの入力に応じて前記モータを(例えば、分散配置されたコントローラ等を介して)駆動させるものであり得る。制御部409はモータ407に接続されており、前記ソフトウェアの実行で生じる出力に従って当該モータ407を駆動する。制御部409はセンサ408に接続されており、当該センサからの検出入力を受信する。制御部409は指令インターフェース412に接続されており、当該指令インターフェース412からの入力を受信する。これらの各接続は、例えば、それぞれ電気ケーブル又は光ケーブルであってもよいし、あるいは、無線接続により提供されるものであってもよい。指令インターフェース412は少なくとも1つの入力装置を有しており、当該入力装置によりユーザは、前記エンドエフェクタの動作を所望に合わせて要求することができる。当該入力装置は、例えば、制御ハンドル、ジョイスティックなどの手動で作動可能な機械的入力装置、光学ジェスチャーセンサなどの非接触式の入力装置等であり得る。メモリ411に記憶された前記ソフトウェアは、それらの入力に応答して前記アームや器具のジョイントを、予め決められた制御方針に準じて相応に動かすように構成されている。当該制御方針は、指令入力に応答して前記アームや器具の動作を緩和するセーフティー機能を含み得る。つまり、まとめると、手術医が指令インターフェース412にて、所望の手術を行うように器具406の動きを制御することができる。制御部409および/または指令インターフェース412は、アーム400から離れた場所にあってもよい。
図5a及び図5bは、手術器具の遠位端部の両側を示す図である。図5a及び図5bでは、エンドエフェクタ501が一対のエンドエフェクタエレメント502,503を含む。図5a及び図5bにおける一対のエンドエフェクタエレメント502,503は、一対の向かい合った凸凹状のジョーとして描かれている。これは、あくまでも例示に過ぎないことを理解されたい。前記エンドエフェクタは、任意の適切な構成のものであればどのような構成のものであってもよく、例えば、前述したような構成のものとされる。エンドエフェクタ501は、関節部505によってシャフト504に連結されている。関節部505は、エンドエフェクタ501がシャフト504に対して動くことを可能にするジョイントを含む。第1のジョイント506は、エンドエフェクタ501が第1の軸心510回りに回転することを可能にする。第1の軸心510は、前記シャフトの長手方向軸心511を横切る。第2のジョイント507は、第1のエンドエフェクタエレメント502が第2の軸心512回りに回転することを可能にする。第2の軸心512は、第1の軸心510を横切る。第3のジョイント513は、第2のエンドエフェクタエレメント503が第2の軸心512回りに回転することを可能にする。好適には、第1のエンドエフェクタエレメント502と第2のエンドエフェクタエレメント503とは、前記第2および第3のジョイントによって第2の軸心512回りに、互いに独立して回転可能とされている。これらのエンドエフェクタエレメントは、前記第2および第3のジョイントによって同じ方向にも相異なる方向にも回転され得る。第2のエンドエフェクタエレメント503を前記第2の軸心回りに回転させることなく、第1のエンドエフェクタエレメント502を当該第2の軸心回りに回転させるということも可能であり得る。第1のエンドエフェクタエレメント502を前記第2の軸心回りに回転させることなく、第2のエンドエフェクタエレメント503を当該第2の軸心回りに回転させるということも可能であり得る。
図5a及び図5bには、前記エンドエフェクタが前記シャフトと一直線状になる前記手術器具の直線状態が描かれている。この向きでは、前記シャフトの長手方向軸心511が、前記関節部の長手方向軸心および前記エンドエフェクタの長手方向軸心と一致する。前記第1、第2および第3のジョイントが回動することにより、前記エンドエフェクタは前記シャフトに対して所定の範囲の向きに位置することができる。図9には、前記第1、第2および第3のジョイントの全てが図5a及び図5bの直線状態から回動駆動された後の、前記器具の遠位端部の幾つかの形態が示されている。
図5a及び図5bを参照する。前記シャフトは、当該シャフトの遠位端部にて第1のジョイント506で終端している。関節部505は、支持体509を含む。支持体509は一方の端部にて、第1のジョイント506によってシャフト504に連結されている。支持体509は当該支持体509の他方の端部にて、第2のジョイント507及び第3のジョイント513によってエンドエフェクタ501に連結されている。つまり、第1のジョイント506は支持体509がシャフト504に対して第1の軸心510回りに回転することを可能にし、第2のジョイント507及び第3のジョイント513はエンドエフェクタエレメント502,503が支持体509に対して第2の軸心512回りに回転することを可能にする。
図面では、第2のジョイント507と第3のジョイント513との両方が、共通の軸心512回りの回転を可能にしている。しかし、変形例として、前記第2のジョイントと第3のジョイントとは、前記エンドエフェクタエレメントの、相異なる軸心回りの回転を可能にするものとされてもよい。一方の前記エンドエフェクタエレメントの回転軸心は、他方のエンドエフェクタエレメントの回転軸心からシャフト504の長手方向にオフセットしているものとされてもよい。一方の前記エンドエフェクタエレメントの回転軸心は、他方のエンドエフェクタエレメントの回転軸心からシャフト504の長手方向を横切る方向にオフセットしているものとされてもよい。一方の前記エンドエフェクタエレメントの回転軸心は、他方のエンドエフェクタエレメントの回転軸心と平行ではないものとされてもよい。エンドエフェクタエレメント502,503の回転軸心同士は、前記シャフトの長手方向にオフセットしているものとされ得て、かつ/あるいは、前記シャフトの長手方向に直交する方向にオフセットしているものとされ得て、かつ/あるいは、互いに傾いているものとされてもよい。これは、前記エンドエフェクタエレメント同士が非対称とされる場合に望ましいものであり得る。例えば、電気手術用のエレメントでは、第1のエンドエフェクタエレメントが通電され得て、かつ、第2のエンドエフェクタエレメントは通電されずに前記第1のエンドエフェクタエレメントから絶縁され得る。これを支援するために、2つの前記エンドエフェクタエレメントの回転軸心同士が、前記シャフトの長手方向に直交する方向にオフセットしているものとされ得る。他の例では、第1のエンドエフェクタエレメントが刃体とされ得て、かつ、第2のエンドエフェクタエレメントが平坦な切断面とされ得る。このような刃体の使用を支援するために、2つの前記エンドエフェクタエレメントの回転軸心同士が、互いに傾いたものとされ得る。
前記関節部の前記ジョイントは、駆動エレメントにより駆動される。当該駆動エレメントは、前記関節部内の前記ジョイントから前記シャフトを通って前記器具インターフェースへと延びる細長いエレメントである。好適には、それぞれの駆動エレメントは少なくとも、当該駆動エレメントが前記関節部内の及び前記器具インターフェース内の部品に係合する領域において、当該駆動エレメントの主要な延在部分(extent)を横切るように撓むことが可能である。すなわち、それぞれの駆動エレメントが、特定の領域において、当該駆動エレメントの長手方向軸心を横切るように撓むことが可能である。このような可撓性により、前記駆動エレメントは前記器具内の前記ジョイント、プーリなどの構造体に巻かれれることができる。前記駆動エレメントは全体的に、当該駆動エレメントの長手方向軸心を横切るように撓むことが可能なものとされてもよい。前記駆動エレメントは、当該駆
動エレメントの主要な延在部分に沿って撓むことはできない。前記駆動エレメントは、当該駆動エレメントの長さに沿って加わる圧縮力及び引張力に抵抗する。すなわち、前記駆動エレメントは、当該駆動エレメントの長手方向軸心の方向に働く圧縮力及び引張力に抵抗する。前記駆動エレメントは、高いモジュラスを有する。前記駆動エレメントは、動作のあいだ緊張状態に維持される。前記駆動エレメントは、緩むことができないようにされている。これにより、前記駆動エレメントは、前記器具インターフェースからの駆動を前記ジョイントへと伝達することができる。前記駆動エレメントは、ケーブルであり得る。
好適には、それぞれのジョイントは、一対の駆動エレメントにより駆動される。図5a及び図5bを参照すると、第1のジョイント506は、第1の対の駆動エレメントA1,A2により駆動される。第2のジョイント507は、第2の対の駆動エレメントB1,B2により駆動される。前記第3のジョイントは、第3の対の駆動エレメントC1,C2により駆動される。好適には、それぞれのジョイントは、当該それぞれのジョイントごとの一対の駆動エレメントにより駆動される。すなわち、それぞれのジョイントは、専用の一対の駆動エレメントにより駆動される。好適には、前記ジョイントは、互いに独立して駆動される。一対の駆動エレメントは、図5a及び図5bで描かれている前記第3の対の駆動エレメントのように一体品として構築されたものであってもよい。この場合、このような一体品が、前記ジョイントへと一箇所で固定されている。例えば、第3の対の駆動エレメントC1,C2は、第3のジョイント513へと固定されたボール構造体520を有している。これにより、前記一対の駆動エレメントが駆動されたときにその駆動が、前記ジョイントの当該ジョイントの軸心回りの運動へと確実に伝えられる。変形例として、一対の駆動エレメントは、2つの部材として構築されたものであってもよい。この場合、別体であるそれぞれの部材が前記ジョイントに固定されている。
図5a及び図5bの手術器具は、さらに、周りを前記第2の対の駆動エレメント及び前記第3の対の駆動エレメントが動くように拘束されているプーリ機構を備える。図6a及び図6bに、当該プーリ機構がより分かり易く描かれている。図6a及び図6bでは、当該プーリ機構をより分かり易く示すために支持体509が省略されている。前記プーリ機構は、第1のセットのプーリ601を含む。第1のセットのプーリ601は、第1の軸心510回りに回転可能である。つまり、第1のセットのプーリ601は、第1のジョイント506と共通の軸心回りに回転する。前記プーリ機構は、さらに、第2のセットのプーリ602を含む。前記プーリ機構は、さらに、一対の偏向プーリ603を含む。
図7に、前記プーリ機構がより分かり易く描かれている。図7では、当該プーリ機構をより分かり易く示すために前記支持体、前記第1のジョイント及び前記第1の対の駆動エレメントが全て省略されている。前記第2のセットのプーリは、第1のプーリ701および第2のプーリ702を含む。第1のプーリ701は、第1の軸心510と平行な第3の軸心703回りに回転可能である。第3の軸心703は、第1の軸心510から、前記シャフトの長手方向にも前記シャフトの長手方向を横切る方向にもオフセットしている。第2のプーリ702は、第1の軸心510と平行な第4の軸心704回りに回転可能である。第4の軸心704は、第1の軸心510から、前記シャフトの長手方向にも前記シャフトの長手方向を横切る方向にもオフセットしている。前記第3の軸心と第4の軸心とは、互いに平行かつ互いにオフセットしている。第3の軸心703と第4の軸心704とは、前記シャフトの長手方向に直交する共通の平面に延在している。図8では、前記手術器具の別の図と同じ遠位端部が、前記第2のセットのプーリの第1のプーリ701の軸心と第2のプーリ702の軸心とがオフセットしている様子がより分かり易くなるようにして描かれている。各プーリに巻かれている前記駆動エレメントは、第1のプーリ701と第2のプーリ702とがオフセットしていることにより、当該プーリに巻き付いた後に前記シャフト内へと延びることができる。図6aに示すように、第2のセットのプーリ602の第1のプーリ701及び第2のプーリ702は、シャフト504の長手方向に対して第1
のジョイント506の両側に配置されている。第1のプーリ701および第2のプーリ702は、第1の対の駆動エレメントA1,A2の両側に配置されている。
前記第2のセットのプーリは、前記第1のセットのプーリと前記シャフトの前記器具インターフェース側の端部との間に配置されている。好適には、前記第2のセットのプーリは、図面に示すように前記シャフト内に配置されている。変形例として、前記第2のセットのプーリは、前記関節部内において第1のジョイント506と第2のジョイント507との間に配置されていてもよい。しかしながら、前記第2のセットのプーリを前記シャフトの遠位端部508のほうに配置することにより、当該第2のセットのプーリが前記関節部内に配置される上記変形例の配置構成に比べて前記第1および第2のジョイント間の距離が短くなるので、エンドエフェクタ501の正確な位置を維持するのに支持体509に必要となる剛性が小さくて済む。
第1のセットのプーリ601は、第1のプーリ705および第2のプーリ706を含む。第1のプーリ705と第2のプーリ706とはいずれも、第1の軸心510回りに回転する。前記第1のセットのプーリの第1のプーリ705及び第2のプーリ706は、シャフト504の長手方向に対して第1のジョイント506の両側に配置されている。第1のプーリ705および第2のプーリ06は、第1の軸心510の両側に配置されている。第1のプーリ705および第2のプーリ706は、第1の対の駆動エレメントA1,A2の両側に配置されている。
第2の対の駆動エレメントB1,B2は、第1のセットのプーリ601の第1のプーリ705の周りと第2のプーリ706の周りとを、互いに反対側で動くように拘束されている。第2の対の駆動エレメントB1,B2は、第2のセットのプーリ601の第1のプーリ701の周りと第2のプーリ702の周りとを、互いに反対側で動くように拘束されている。前記第2の対の駆動エレメントは、第1のセットのプーリ601の第1のプーリ705の周りと第2のセットのプーリ602の第1のプーリ701の周りとを、互いに反対側で動くように拘束されている。前記第2の対の駆動エレメントは、第1のセットのプーリ601の第2のプーリ706の周りと第2のセットのプーリ602の第2のプーリ702の周りとを、互いに反対側で動くように拘束されている。
第3の対の駆動エレメントC1,C2は、第1のセットのプーリ601の第1のプーリ705の周りと第2のプーリ706の周りとを、互いに反対側で動くように拘束されている。第3の対の駆動エレメントC1,C2は、第2のセットのプーリ601の第1のプーリ701の周りと第2のプーリ702の周りとを、互いに反対側で動くように拘束されている。前記第3の対の駆動エレメントは、第1のセットのプーリ601の第1のプーリ705の周りと第2のセットのプーリ602の第1のプーリ701の周りとを、互いに反対側で動くように拘束されている。前記第3の対の駆動エレメントは、第1のセットのプーリ601の第2のプーリ706の周りと第2のセットのプーリ602の第2のプーリ702の周りとを、互いに反対側で動くように拘束されている。
前記第2の対の駆動エレメント及び第3の対の駆動エレメントはそれぞれ、第1のジョイント506を越えて延びることで前記第2のジョイント、前記第3のジョイントにそれぞれ到達するように拘束されている。つまり、前記第2の対の駆動エレメントの第1の駆動エレメントB1は第1のジョイント軸心510にある前記第1のセットのプーリの第1のプーリ705を一方の側で通過し、前記第2の対の駆動エレメントの第2の駆動エレメントB2は第1のジョイント軸心510にある前記第1のセットのプーリの第2のプーリ706を反対側で通過しており、これにより、支持体509が第1のジョイント506を中心としてどのように回転したとしても、第2の対の駆動エレメントB1,B2の長さが同じままで維持される。同様に、前記第3の対の駆動エレメントの第1の駆動エレメント
C1は第1のジョイント軸心510にある前記第1のセットのプーリの第2のプーリ706を一方の側で通過し、前記第3の対の駆動エレメントの第2の駆動エレメントC2は第1のジョイント軸心510にある前記第1のセットのプーリの第1のプーリ705を反対側で通過しており、これにより、支持体509が第1のジョイント506を中心としてどのように回転したとしても、第3の対の駆動エレメントC1,C2の長さが同じままで維持される。よって、前記器具インターフェースにおける第2の対の駆動エレメントB1,B2の配置構成と第3の対の駆動エレメントC1,C2の配置構成とが対称であれば、支持体509の第1のジョイント506を中心とするどのような回転角度においても、前記第2の対の駆動エレメントの長さが前記第3の対の駆動エレメントの長さと同一になる。前記手術器具のどのような状態においても、前記第2の対の駆動エレメント及び前記第3の対の駆動エレメントは緊張状態に維持される。これらは、決して緩まない。これにより、前記手術器具のどの前記ジョイントを回動させるときにもガタが生じない。したがって、前記手術器具のどのような状態においても、当該手術器具の運動の3の自由度の全てを自在に制御することができる。
好適には、第1のセットのプーリ601のそれぞれのプーリが、一対のプーリエレメントを有している。第1のプーリ705は、内側のプーリエレメント708および外側のプーリエレメント709を含む。内側のプーリエレメント708は、外側のプーリエレメント709と第1の対の駆動エレメントA1,A2との間に配置されている。好適には、内側のプーリエレメント708が、外側のプーリエレメント709に当接している。内側のプーリエレメント708は、外側のプーリエレメント709に固定されているものとされてもよい。内側のプーリエレメント708は、外側のプーリエレメント709と一体的に形成されたものとされてもよい。第2のプーリ706は、内側のプーリエレメント710および外側のプーリエレメント711を含む。内側のプーリエレメント710は、外側のプーリエレメント711と第1の対の駆動エレメントA1,A2との間に配置されている。好適には、内側のプーリエレメント710が、外側のプーリエレメント711に当接している。内側のプーリエレメント710は、外側のプーリエレメント711に固定されているものとされてもよい。内側のプーリエレメント710は、外側のプーリエレメント711と一体的に形成されたものとされてもよい。それぞれのプーリエレメントは、駆動エレメントを係合させる溝を有している。
好適には、第2のセットのプーリ602のそれぞれのプーリが、一対のプーリエレメントを有している。第1のプーリ701は、内側のプーリエレメント712および外側のプーリエレメント713を含む。内側のプーリエレメント712は、外側のプーリエレメント713と第1の対の駆動エレメントA1,A2との間に配置されている。好適には、内側のプーリエレメント712が、外側のプーリエレメント713に当接している。内側のプーリエレメント712は、外側のプーリエレメント713に固定されているものとされてもよい。内側のプーリエレメント712は、外側のプーリエレメント713と一体的に形成されたものとされてもよい。第2のプーリ702は、内側のプーリエレメント714および外側のプーリエレメント715を含む。内側のプーリエレメント714は、外側のプーリエレメント715と第1の対の駆動エレメントA1,A2との間に配置されている。好適には、内側のプーリエレメント714が、外側のプーリエレメント715に当接している。内側のプーリエレメント714は、外側のプーリエレメント715に固定されているものとされてもよい。内側のプーリエレメント714は、外側のプーリエレメント715と一体的に形成されたものとされてもよい。それぞれのプーリエレメントは、駆動エレメントを係合させる溝を有している。
第2の対の駆動エレメントB1,B2は、前記第2のセットのプーリの前記第1のプーリの内側のプーリエレメント712の周りと、前記第2のセットのプーリの前記第2のプーリの外側のプーリエレメント715の周りとを動くように拘束されている。第2の対の
駆動エレメントB1,B2は、前記第1のセットのプーリの前記第1のプーリの内側のプーリエレメント708の周りと、前記第1のセットのプーリの前記第2のプーリの外側のプーリエレメント711の周りとを動くように拘束されている。
第3の対の駆動エレメントC1,C2は、前記第2のセットのプーリの前記第1のプーリの外側のプーリエレメント713の周りと、前記第2のセットのプーリの前記第2のプーリの内側のプーリエレメント714の周りとを動くように拘束されている。第3の対の駆動エレメントC1,C2は、前記第1のセットのプーリの前記第1のプーリの外側のプーリエレメント709の周りと、前記第1のセットのプーリの前記第2のプーリの内側のプーリエレメント710の周りとを動くように拘束されている。
したがって、第2の対の駆動エレメントB1,B2と第3の対の駆動エレメントC1,C2とは、第1および第2のセットのプーリ601,602周りの経路が、互いに逆となる対称的な経路となっている。前記エンドエフェクタが前記シャフトと一直線状になる前記器具の直線状態において、第2の対の駆動エレメントB1,B2の、前記プーリ機構周りの経路が、第3の対の駆動エレメントC1,C2の、当該プーリ機構周りの経路に対して、シャフト511の長手方向軸心を基準として回転対称となる。第2の対の駆動エレメントB1,B2と第3の対の駆動エレメントC1,C2とは、第2のセットのプーリ602から前記シャフトの遠位端部内へと対称的な配置構成で進行する。図7で容易に見て取れるように、前記シャフトの一方の側では駆動エレメントB1と駆動エレメントC2とが互いに隣接して進行し、当該シャフトの反対側では駆動エレメントC1と駆動エレメントB2とが互いに隣接して進行する。前記シャフト内での駆動エレメントB1と駆動エレメントC2との配置構成は、当該シャフト内での駆動エレメントC1と駆動エレメントB2との配置構成に対して、当該シャフトの長手方向軸心511を基準として回転対称である。第2のセットのプーリ602が、第1のセットのプーリ601から前記第2の対の駆動エレメント及び前記第3の対の駆動エレメントを、このように前記シャフト内へと偏向する。
図7には、相異なる5つの形態での前記手術器具の遠位端部が示されている。形態(c)は、前記エンドエフェクタが前記器具シャフトと一直線状になる前述した直線状態である。形態(a)、(b)、(d)及び(e)では、形態(c)から前記第1のジョイントを中心として回転が生じている。形態(a)、(b)、(d)及び(e)では、形態(c)から前記第2のジョイントを中心とした回転および前記第3のジョイントを中心とした回転がいずれも生じていない。形態(c)を起点とすると、駆動エレメントA2(図示せず)が牽引されることにより、第1の軸心510回りの回転が発生し、形態(b)の配置構成に移行する。駆動エレメントA2がさらに牽引されることにより、第1の軸心510回りにさらなる回転が発生し、形態(a)の配置構成に移行する。形態(c)を起点とすると、駆動エレメントA1(図示せず)が牽引されることにより、第1の軸心510回りの回転が形態(a)及び(b)での方向とは逆方向に発生し、これによって形態(d)の配置構成に移行する。駆動エレメントA1がさらに牽引されることにより、第1の軸心510回りにさらなる回転が発生し、形態(e)の配置構成に移行する。
第1の軸心510回りのエンドエフェクタ501の回転は、第1のジョイント506を中心とした第1の対の駆動エレメントA1,A2の上限移動量により制限されている。形態(a)は、エンドエフェクタ501が第1の軸心510回りに一方の方向へと最大限まで回転した形態を示しており、形態(e)は、エンドエフェクタ501が第1の軸心510回りに逆方向へと最大限まで回転した形態を示している。いずれの形態においても、前記シャフトの長手方向軸心511に対する最大回転角度は角度φとされる。第2のセットのプーリ602は、最大回転角度φにおいても前記第2の対の駆動エレメント及び前記第3の対の駆動エレメントが第1のセットのプーリ601と当該第2のセットのプーリ60
2との接触状態に維持されることが確実になるように、第1のセットのプーリ601に対して相対配置されている。第1の軸心510回りのエンドエフェクタ501の回転角度がどのような回転角度であっても、当該エンドエフェクタ501は常に、前記第2のセットのプーリの第1のプーリ701と前記第1のセットのプーリの第1のプーリ705とを繋ぐ接線により画定される円錐内に位置している。当該接線は、前記駆動エレメントが取る経路である。ただし、エンドエフェクタ501が前記円錐内に位置するときには、図7の全ての形態で描かれているように前記第2のジョイントと第3のジョイントとが図5a及び図5bの直線状態に維持されているものとする。図7から見て取れるように、第2のセットのプーリ602がなければ、形態(a)で駆動エレメントB2及び駆動エレメントC1が第1のセットのプーリ601との接触を失うことになる。第2のセットのプーリ602がなければ、形態(e)で駆動エレメントB1及び駆動エレメントC2が第1のセットのプーリ601との接触を失うことになる。
前記エンドエフェクタの前記シャフトの長手方向軸心に対するあらゆる回転角度に対して、前記第2の対の駆動エレメント及び第3の対の駆動エレメントは、前記第1のセットのプーリと第2のセットのプーリとの接触状態に維持される。つまり、第1のジョイント506を中心とした回転に関係なく、第2の対の駆動エレメントB1,B2の長さは同じままで維持される。また、第1のジョイント506を中心とした回転に関係なく、第3の対の駆動エレメントC1,C2の長さは同じままで維持される。つまり、前記第2のセットのプーリにより、第1のジョイント506が第1の軸心510回りにどの程度駆動されるのかにかかわらず、前記第2の対の駆動エレメント及び第3の対の駆動エレメントの張力が維持されることができる。したがって、第1のジョイント506が第1の軸心510回りにどの程度駆動されるのかにかかわらず、前記第2の対の駆動エレメント及び第3の対の駆動エレメントの制御を維持することができる。
前記プーリ機構は、さらに、一対の偏向プーリ716,717を含む。これらの偏向プーリは、関節部505内において第1のジョイント506と第2および第3のジョイント507,513との間に存在している。これらの偏向プーリは、第1のセットのプーリ601から第2の対の駆動エレメントB1,B2を第2のジョイント507へと、第1のセットのプーリ601から第3の対の駆動エレメントC1,C2を第3のジョイント513へと偏向するように配置されている。
第2の対の駆動エレメントB1,B2は、第1の偏向プーリ716の周りを移動するように拘束されている。第1の偏向プーリ716は、第1の偏向プーリ軸心718回りに回転する。第1の偏向プーリ軸心718は、第1の軸心510に対して角度θをなす。角度θは、第2の対の駆動エレメントの第1の駆動エレメントB1が第1のセットのプーリ601の第1のプーリ705の繰出し点から第2のジョイント507上の巻取り点721へと偏向されるような角度に設定される。好適には、第1の偏向プーリ716は、駆動エレメントB1を係合させる溝を有している。第3の対の駆動エレメントC1,C2は、第1の偏向プーリ716の周りを移動するように拘束されていない。むしろ、第3の対の駆動エレメントの第2の駆動エレメントC2が、第3のジョイント513の当該第2の駆動エレメントC2の繰出し点と第1のセットのプーリ601の第1のプーリ705上での当該第2の駆動エレメントC2の巻取り点との間において第1の偏向プーリ716の傍を通る。駆動エレメントC2は、第1の偏向プーリ716によって部分的に取り囲まれているものであり得る。例えば、駆動エレメントC2は、第1の偏向プーリ716の前記溝における肩部と肩部との間を部分的に通過するものとされ得るが、当該第1の偏向プーリ716の当該溝には係合しない。
第3の対の駆動エレメントC1,C2は、第2の偏向プーリ717の周りを移動するように拘束されている。第2の偏向プーリ717は、第2の偏向プーリ軸心719回りに回
転する。第2の偏向プーリ軸心719は、第1の軸心510に対して角度ψをなす。角度ψは、第3の対の駆動エレメントの第1の駆動エレメントC1が第1のセットのプーリ601の第2のプーリ706の繰出し点720から第3のジョイント513上の巻取り点へと偏向されるような角度に設定される。好適には、第2の偏向プーリ717は、駆動エレメントC1を係合させる溝を有している。第2の対の駆動エレメントB1,B2は、第2の偏向プーリ717の周りを移動するように拘束されていない。むしろ、第2の対の駆動エレメントの第2の駆動エレメントB2が、第2のジョイント507の当該第2の駆動エレメントB2の繰出し点720と第1のセットのプーリ601の第2のプーリ706上での当該第2の駆動エレメントB2の巻取り点との間において第2の偏向プーリ717の傍を通る。駆動エレメントB2は、第2の偏向プーリ717によって部分的に取り囲まれているものであり得る。例えば、駆動エレメントB2は、第2の偏向プーリ717の前記溝における肩部と肩部との間を部分的に通過するものとされ得るが、当該第2の偏向プーリ717の当該溝には係合しない。
繰出し点とは、駆動エレメントがプーリとの接触を失う点である。巻取り点とは、駆動エレメントがプーリに最初に接触する点である。第1のプーリから第2のプーリへと直接渡されている駆動エレメントの場合には、当該第1のプーリからの駆動エレメントの繰出し点と当該第2のプーリ上での駆動エレメントの巻取り点とが、これら第1のプーリと第2のプーリとの両方に接する直線上の点であり、繰出し点はその接線が第1のプーリと交わる箇所であり、巻取り点はその接線が第2のプーリと交わる箇所である。これはあくまでも説明の便宜上のものであり、駆動エレメントの厚さについては無視可能な程度に過ぎないと見なしている。つまり、実際には、その接線は駆動エレメントの厚さに等しい厚さを有することになり、繰出し点は当該接線の一方の側が第1のプーリと合わさる箇所であり、巻取り点は当該接線の他方の側が第2のプーリと合わさる箇所である。
偏向プーリ716が設けられていることにより、当該偏向プーリ716が設けられていないときよりも、駆動エレメントB1が第2のジョイント507周りにより完全に巻かれることになるので、駆動エレメントB1と第2のジョイント507との係合部の長さが増えることになる。よって、第2のジョイント507周りでの駆動エレメントB1の運動域が増えるので、第2の軸心512回りのエンドエフェクタエレメント502の回転を、偏向プーリ716が設けられていないときよりも多く引き起こすことができる。偏向プーリ716が設けられていることにより、第2のジョイント507上での駆動エレメントB1の巻取り点は、当該偏向プーリ716が設けられていないときの当該巻取り点の箇所から変化する。
偏向プーリ717が設けられていることにより、当該偏向プーリ717が設けられていないときよりも、駆動エレメントC1が第3のジョイント513周りにより完全に巻かれることになるので、駆動エレメントC1と第3のジョイント513との係合部の長さが増えることになる。よって、第3のジョイント513周りでの駆動エレメントC1の運動域が増えるので、第2の軸心512回りのエンドエフェクタエレメント503の回転を、偏向プーリ717が設けられていないときよりも多く引き起こすことができる。偏向プーリ717が設けられていることにより、第3のジョイント513上での駆動エレメントC1の巻取り点は、当該偏向プーリ717が設けられていないときの当該巻取り点の箇所から変化する。
前記偏向プーリは、前記関節部の両側においてそれぞれ、当該関節部の外縁に向かって配置されている。これは、図5において容易に見て取れる。図6aで見て取れるように、それぞれの偏向プーリは、前記関節部の両側において、当該関節部の長手方向軸心と当該関節部の外形プロファイルとの間に配置されている。好適には、それぞれの偏向プーリの直径は、利用可能な空間に対して最大限に大きいものとされている。すなわち、前記偏向
プーリは、ある駆動エレメントが当該プーリの一方の側で当該プーリと係合するのを可能にし、別の駆動エレメントが当該プーリの反対側でスナッギングを生じることなく当該プーリの傍を通るのを可能にしつつ、しかも当該プーリとこれら2つの駆動エレメントとが前記関節部のプロファイル内に収まるようにしながら出来る限り大きいものとされている。
第1の偏向プーリ716は、(i)第1のセットのプーリ601の第1のプーリ705からの駆動エレメントB1の所望の繰出し点と(ii)第2のジョイント507上での駆動エレメントB1の所望の巻取り点と(iii)前記関節部の境界上の点とにより画定される平面内に位置しており、(iii)の点は、第1の偏向プーリ716がその平面内に位置したときに当該第1の偏向プーリ716が前記関節部の境界の内側に収まるような点とされる。好適には、第1の偏向プーリ716は、この平面内に位置しつつ、前記関節部のプロファイル内に収まり、駆動エレメントC2の経路を妨げることなく駆動エレメントB1が当該第1の偏向プーリ716周りを自在に動くことを可能にしながら出来る限り大きいものとされている。
第2の偏向プーリ717は、(i)第1のセットのプーリ601の第2のプーリ706からの駆動エレメントC1の所望の繰出し点と(ii)第3のジョイント513上での駆動エレメントC1の所望の巻取り点と(iii)前記関節部の境界上の点とにより画定される平面内に位置しており、(iii)の点は、第2の偏向プーリ717がその平面内に位置したときに当該第2の偏向プーリ717が前記関節部の境界の内側に収まるような点とされる。好適には、第2の偏向プーリ717は、この平面内に位置しつつ、前記関節部のプロファイル内に収まり、駆動エレメントB2の経路を妨げることなく駆動エレメントC1が当該第2の偏向プーリ717周りを自在に動くことを可能にしながら出来る限り大きいものとされている。
前記所望の繰出し点及び前記所望の巻取り点は、前記第2のジョイント周りや前記第3の前記駆動エレメントの所望の運動域であって、前記エンドエフェクタエレメントに前記第2の軸心回りに所望の最大限の回転を行わせることができる所望の運動域を可能にするように決められる。
前記第1の偏向プーリと第2の偏向プーリとは、相異なる平面内に位置している。図6aで見て取れるように、これらの平面は、第1の軸心510と直交する平面を基準として対称であり得る。これらの平面は、第1の軸心510と直交する平面を基準として回転対称であり得る。具体的に述べると、これらの平面は、第1の軸心510と直交する平面上の直線を基準として回転対称であり得る。これらの平面は、前記器具が図6aに示す直線状態にあるときにシャフト511の長手方向軸心を基準として回転対称である。これは、2回の回転対称である。これらの平面は、第1の軸心510と直交する平面での互いの鏡像であり得る。図示の例では、エンドエフェクタエレメント502とエンドエフェクタエレメント503とが回転対称であり且つジョイント507周りの前記駆動エレメントの経路とジョイント513周りの前記駆動エレメントの経路とが回転対称である。変形例では、エンドエフェクタエレメント502の軸心とエンドエフェクタエレメント503の軸心とが回転非対称であり得て、かつ/あるいは、ジョイント507周りの前記駆動エレメントの経路とジョイント513周りの前記駆動エレメントの経路とが非対称であり得る。ジョイント507周りの前記駆動エレメントの経路とジョイント513周りの前記駆動エレメントの経路とは、これらのジョイントの直径が(張力比を相異なるものにできるように)相異なるものとされている結果および/またはこれらのジョイントが支持体509の中心線から相異なるオフセットの箇所に配置されている結果として非対称であり得る。これらの変形例のいずれにおいても、第1の偏向プーリ716と第2の偏向プーリ717とが回転非対称となる。その場合の第1の偏向プーリ716及び第2の偏向プーリ717の位
置および/または寸法は、前記駆動エレメントに前述したような所望の繰出し点及び所望の巻取り点を取らせるために上記とは異なるものとなる。
好適には、前記第1のセットのプーリ、前記第2のセットのプーリ及び前記偏向プーリを含む前記プーリ機構の全体が、第1の軸心510と直交する平面を基準として対称である。具体的に述べると、前記第1のプーリのセットの第1のプーリ705、前記第2のセットのプーリの第1のプーリ701及び第1の偏向プーリ716を含む第1の部分配置構成が、前記第1のプーリのセットの第2のプーリ706、前記第2のセットのプーリの第2のプーリ702及び第2の偏向プーリ717を含む第2の部分配置構成に対して、第1の軸心510と直交する平面を基準として回転対称である。好適には、前記第1の部分配置構成は、第1の軸心510と直交する前述した平面での前記第2の部分配置構成の鏡像である。第2の対の駆動エレメントB1,B2は、第3の対の駆動エレメントC1,C2が前記プーリ機構の周りを移動するように拘束されている様式とは逆となる回転対称の様式で、当該プーリ機構の周りを移動するように拘束されている。前記プーリ機構が上記のような対称性を有していることにより、当該プーリ機構の周りを対称的に動くように拘束されている前記第2の対の駆動エレメントと第3の対の駆動エレメントも同じ対称性を有している。これにより、前記プーリ機構周りの第2の対の駆動エレメントB1,B2の経路が、当該プーリ機構周りの第3の対の駆動エレメントC1,C2の経路に対して回転対称となる。
例的な一応用例では、前記第1の偏向プーリと前記第2の偏向プーリとが、支持体509に取り付けられている。図10には、支持体509とこれらの偏向プーリのみが示されている。それぞれの偏向プーリは、支持体509の表面へとスピンドルで取り付けられている。スピンドル1001が、第1の偏向プーリ716を支持体509へと固定している。また、スピンドル1102が、第2の偏向プーリ717を支持体509へと固定している。
図11に分かり易く描かれているように、支持体509は、第1の偏向プーリ716が取り付けられている傾斜面1101を有している。第1の偏向プーリ716は、支持体509の傾斜面1101に対向する取付面1104を有している。取付面1104は、傾斜面1101と同一面上に配置されている。前記第1の偏向プーリは、取付面1104とは反対側にある反対面1105を有している。反対面1105は、取付面1104と平行である。支持体509は、第2の偏向プーリ717がスピンドル1103で取り付けられているさらなる傾斜面を有している。第2の偏向プーリ717は、支持体509の傾斜面1102に対向する取付面1106を有している。取付面1106は、傾斜面1102と同一面上に配置されている。前記第2の偏向プーリは、取付面1102とは反対側にある反対面1107を有している。反対面1107は、取付面1102と平行である。
支持体509のそれらの傾斜面は、当該支持体の長手方向軸心と平行でない。支持体509の傾斜面1101は、第1の偏向プーリ716が位置している平面1109と平行な平面1108に位置している。すなわち、傾斜面1101は、(i)第1のセットのプーリ601の第1のプーリ705からの駆動エレメントB1の所望の繰出し点と(ii)第2のジョイント507上での駆動エレメントB1の所望の巻取り点と(iii)前記関節部の境界上の点とにより画定される平面1109と平行な平面1108に位置しており、(iii)の点は、第1の偏向プーリ716がその平面1109に位置したときに当該第1の偏向プーリ716が前記関節部の境界の内側に収まるような点とされる。傾斜面1101の平面1108は、これらの点により画定される平面1109から、第1の偏向プーリ716の幅の(図11に示すような)半分d1だけオフセットしている。
支持体509の傾斜面1102は、第2の偏向プーリ717が位置している平面111
1と平行な平面1110に位置している。すなわち、傾斜面1102は、(i)第1のセットのプーリ601の第2のプーリ706からの駆動エレメントC1の所望の繰出し点と(ii)第3のジョイント513上での駆動エレメントC1の所望の巻取り点と(iii)前記関節部の境界上の点とにより画定される平面1111と平行な平面1110に位置しており、(iii)の点は、第2の偏向プーリ717がその平面1111に位置したときに当該第2の偏向プーリ717が前記関節部の境界の内側に収まるような点とされる。傾斜面1101の平面1110は、これらの点により画定される平面1111から、第2の偏向プーリ717の幅の(図11に示すような)半分d2ぶんオフセットしている。好適には、第1の偏向プーリ716と第2の偏向プーリ7171とが同じ形状及び寸法である。この場合、d1=d2である。
前述したように、それぞれの偏向プーリは、前記支持体の対応する前記傾斜面へとスピンドルで取り付けられている。当該スピンドルは、スピンドルの本体およびスピンドルのヘッドを有する。当該スピンドルの本体は、前記偏向プーリにおける中央開口に挿通されている。当該中央開口は、前記偏向プーリの前記取付面と前記反対面との間を垂直に延びる貫通孔である。前記スピンドルの本体は、前記偏向プーリにおける前記中央開口を通って前記支持体における穴部へと挿通されている。図12及び図13には、支持体509のみが示されている。これらの図には、前記支持体における前記穴部の例的な一応用例が描かれている。前記穴部は、前記支持体において一点に至るまで縮径する凹所である。前記スピンドルの本体は、前記穴部の最初の開口部分に挿通されて縮径部分へと固定的に押し込まれる。前記スピンドルのヘッドは、前記偏向プーリにおける前記中央開口よりも大きいので、当該偏向プーリにおける当該中央開口を通り抜けることができない。結果として、前記スピンドルのヘッドは、前記偏向プーリを前記支持体の前記傾斜面に対して同一平面上に固定する。前記スピンドルのヘッドが、前記偏向プーリの前記反対面の少なくとも一部に接触し、当該接触により、当該偏向プーリが前記傾斜面に対して保持される。
図14を参照する。前記支持体における穴部1401の直径は、スピンドルの本体1403の直径よりも大きい。前記偏向プーリにおける中央開口1402の直径は、スピンドルの本体1403の直径よりも大きいものであり得る。これにより、前記スピンドルの本体は、前記偏向プーリにおける前記中央開口に遊嵌し得る。前記スピンドルの本体は前記支持体における前記穴部(上記の例では、前記縮径部分)内へと、当該スピンドルの本体が当該穴部に固定される領域を除いて遊嵌する。典型的には、前記支持体における前記穴部は、製造時に当該支持体の前記傾斜面を穿孔することによって形成される。前記傾斜面における前記穴部の前記開口部分の直径は前記スピンドルの本体よりも大きいので、当該穴部を形成するのに前記支持体が穿孔される角度の精度は重要ではなくなる。前記スピンドルは前記穴部内に、前記偏向プーリを前記傾斜面と同一平面上に係合させるための正確な角度で係合する。前記穴部内での前記スピンドルの本体の嵌め合いが締まり嵌めであって且つこれが前記偏向プーリを偏向プーリ軸心718,719回りに回転させるための手段である場合には、前記穴部の角度を極めて正確に穿孔することが重大となる。この場合には、前記プーリが前記スピンドルに緊密に取り付けられて且つ当該スピンドルが前記穴部へと緊密に取り付けられることにより、当該プーリが歳差運動するのを防ぐ。そのため、前記支持体に前記穴部が穿孔される角度の製造偏差に余裕がない。しかし、上記の応用例では、前記偏向プーリが支持体509の偏向プーリ軸心718,719と直交する傾斜面と同一平面上に保持されている結果として、当該偏向プーリが偏向プーリ軸心718,719回りに回転させられる。よって、上記の応用例では、前記支持体に前記穴部が穿孔される角度の精度の製造ばらつきが大きくても、これを許容することができる。
前記支持体の傾斜面1101と傾斜面1102とは、互いに平行でない。これら傾斜面同士は、第1の軸心510と直交する平面を基準として対称であり得る。これら傾斜面同士は、第1の軸心510と直交する平面を基準として回転対称であり得る。具体的に述べ
ると、これら傾斜面同士は、第1の軸心510と直交する平面上の直線を基準として回転対称であり得る。これら傾斜面同士は、前記器具が図5aに示す直線状態にあるときにシャフト511の長手方向軸心を基準として回転対称である。これは、2回の回転対称である。これら傾斜面同士は、第1の軸心510と直交する平面での互いの鏡像であり得る。
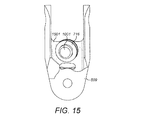
図15を参照する。一例では、支持体509が、駆動エレメントを係合させる溝をそれぞれの傾斜面の傍に有している。前記支持体は、前記第3の対の駆動エレメントの第2の駆動エレメントC2を係合させる溝1501を傾斜面1101の傍に有している。駆動エレメントC2は、溝1501に係合されて且つ第1の偏向プーリ716によって部分的に取り囲まれる。前記支持体は、前記第2の対の駆動エレメントの第2の駆動エレメントB2を係合させる溝1502を傾斜面1102の傍に有している。図11に、溝1502が描かれている。駆動エレメントB2は、溝1502に係合されて且つ第2の偏向プーリ717によって部分的に取り囲まれる。
前記第1の対の駆動エレメント、第2の対の駆動エレメント及び第3の対の駆動エレメントは、前記シャフトの前記関節部に連結された遠位端部から、当該器具シャフト内を通って、当該シャフトの前記器具インターフェースの駆動機構に連結された近位端部へと延びている。図17a及び図17bは、前述した関節部から前記第1の対の駆動エレメント、第2の対の駆動エレメント及び第3の対の駆動エレメントが例的な器具インターフェース1701へと延びている様子を描いた図である。例的な一応用例では、前記第2の対の駆動エレメントと第3の対の駆動エレメントとが、前記シャフトの遠位端部での配置構成と異なる配置構成で当該シャフトの近位端部から進行するように当該シャフト内において重なっている。図16には、前記シャフトの断面が、前記駆動エレメント同士の位置を示すように描かれている。
図16の(a)には、前記シャフトの遠位端部での、当該シャフトの断面が描かれている。すなわち、図16の(a)は、前記駆動エレメントが第2のセットのプーリ602から離れるときの当該駆動エレメントの位置を示したものである。駆動エレメントA1と駆動エレメントA2とは、第1のジョイント506を離れた後、前記シャフトの互いに反対側に存在している。駆動エレメントC1及び駆動エレメントB2は、前記シャフトの、互いに隣接している駆動エレメントB1及び駆動エレメントC2とは反対側で、同じく互いに隣接している。駆動エレメントC1及び駆動エレメントB2は、駆動エレメントA1と駆動エレメントA2とを繋ぐ軸心1602を横切る軸心1601を挟んで、駆動エレメントB1及び駆動エレメントC2からオフセットしている。これは、前記第2のセットのプーリの2つのプーリの軸心同士がオフセットしている結果である。
図16の(b)には、前記シャフトの近位端部での、当該シャフトの断面が描かれている。すなわち、図16の(b)は、前記駆動エレメントが前記シャフトから前記器具インターフェース内へと脱出するときの当該駆動エレメントの位置を示したものである。第1の対の駆動エレメントA1,A2同士は、図16の(a)での当該第1の対の駆動エレメントA1,A2の配置構成と同様に、前記シャフトの互いに反対側に存在している。前記第1の対の駆動エレメントは、前記シャフト内において当該第1の対の駆動エレメントの延在軌道にわたって若干互いに接近することによって互いに近付き得る。図16の(b)では駆動エレメントB1が、前記シャフトの、図16の(a)での当該駆動エレメントB1の位置とは反対側に位置している。図16の(b)では駆動エレメントC1が、前記シャフトの、図16の(a)での当該駆動エレメントC1の位置とは反対側に位置している。これを実現するために、駆動エレメントB1と駆動エレメントC1とは、前記シャフト内で当該シャフト511の長手方向軸心と平行に延びていない。むしろ、駆動エレメントB1と駆動エレメントC1とは、前記シャフト内での当該駆動エレメントB1及び駆動エレメントC1の延出中に重なっている。この重なりは、第2のセットのプーリ602のプ
ーリの軸心同士がオフセットしていることで図16の(a)での駆動エレメントB1の位置と駆動エレメントC1の位置も互いにオフセットしているため、当該駆動エレメントB1と当該駆動エレメントC1とが衝突することなく行われる。駆動エレメントB2は、前記シャフト内で位置が若干動くものの、前記シャフトの図16の(a)のときと同じ側に留まるので、当該シャフトの近位端部において駆動エレメントB1と隣接して進行する。駆動エレメントC2は、前記シャフト内で位置が若干動くものの、前記シャフトの図16の(a)のときと同じ側に留まるので、当該シャフトの近位端部において駆動エレメントC1と隣接して進行する。
前記器具インターフェースは、周りを前記第1の対の駆動エレメント、第2の対の駆動エレメント及び第3の対の駆動エレメントが動くように拘束されているさらなるプーリ機構を含む。駆動エレメントA1,A2,B1,B2,C1,C2は前記シャフトの近位端部において、当該駆動エレメントA1,A2,B1,B2,C1,C2が前記器具インターフェースの部品へと直接係合することを可能にする配置構成で進行する。一応用例では、前記駆動エレメントが前記シャフトの近位端部において、前記器具インターフェースの後で詳述するような前記さらなるプーリ機構へと直接係合するように、図16の(b)に示す配置構成で進行する。好適には、前記第1の対の駆動エレメント、第2の対の駆動エレメント及び第3の対の駆動エレメントが、前記シャフトの遠位端部における前記プーリ機構から前記器具インターフェースへと中間プーリに巻かれることなく延びている。好適には、周りを前記第1の対の駆動エレメントおよび/または第2の対の駆動エレメントおよび/または第3の対の駆動エレメントが動くように拘束されている中間プーリが、前記シャフト内に存在していない。
前記器具インターフェースは、図17a及び図17bで見て取れるように比較的扁平である。当該器具インターフェースは、図17aの真向かいにある中央平面上に大半が延在している。好適には、器具シャフト504は、器具インターフェース1701に強固に取り付けられている。器具シャフト504は、器具インターフェース1701に対して回転したり動いたりしない。好適には、エンドエフェクタエレメント502,503が回転する第2の軸心512は、前記器具インターフェースの中央平面と直交している。これは、前記器具が図17a及び図17bに示す直線状態であるときに当てはまる。つまり、前記器具の直線状態では、前記エンドエフェクタの前記ジョーが前記器具インターフェースの中央平面上で動くことができる。
駆動エレメントは、自身の長さに沿って同じ形状及び寸法を有し且つ自身の長さに沿って同一材料で構築されている一様な部品であり得る。変形例として、前記駆動エレメントは、複数の相異なる部位で構成されているものとされてもよい。一例では、前記駆動エレメントの前記器具インターフェースの部品(例えば、プーリ、インターフェースエレメント等)に係合する部位が、可撓性とされる。同様に、前記駆動エレメントの、前記手術器具の遠位端部の部品(例えば、前記関節部内の前記プーリ、ジョイント等)に係合する部位も、可撓性とされる。これら2つの可撓部の間には、図17a及び図17bに示すスポーク1702が存在している。つまり、各対の駆動エレメントは、2つのスポークと2つの可撓部とを有している。各対の駆動エレメントは、ループを形成している。当該ループは、スポークと可撓部とを交互に有している。前記2つのスポークは、大部分が又は完全に、前記器具シャフト内に収まっている。遠位側の可撓部は一方の端部にて、一方の前記スポークの遠位端部で終端しており、かつ、他方の端部にて、他方の前記スポークの遠位端部で終端している。当該遠位側の可撓部は、前記関節部の部品に係合している。近位側の可撓部は一方の端部にて、一方の前記スポークの近位端部で終端しており、かつ、他方の端部にて、他方の前記スポークの近位端部で終端している。当該近位側の可撓部は、前記器具インターフェースの部品に係合している。前記スポークは、前記可撓部よりも高剛性である。好適には、前記スポークが剛体である。前記スポークは、中空とされてもよい
。典型的には、前記スポークの直径は前記可撓部よりも大きい。よって、前記可撓部はケーブルとされ得て且つ前記スポークは中空チューブとされ得る。前記可撓部は、当該可撓部が前記スポークに合わさる箇所で終端し得る。変形例として、前記スポークは、前記可撓部の材料を包み込んでいてもよい。例えば、前記スポークは、可撓性のケーブルを覆う剛体のシースとされてもよい。
前記スポークは、前記可撓部よりも高剛性である。よって、一対の駆動エレメントをスポークと可撓部とで形成することにより、当該駆動エレメントが伸びる可能性が抑えられる。この理由により、各駆動エレメントのスポークである割合は、当該スポークが前記関節部の又は前記器具インターフェースの部品に触れないことを確実にすると共に隣接し合う駆動エレメント同士がぶつからないことを確実にしながら最大限に高められるのが好ましい。前記スポークは前記可撓部よりも強固なので、どの方向に加わった圧縮力及び引張力に対しても、前記可撓部よりも高い復元性を示す。つまり、前記スポークを組み込むことによって前記駆動エレメントは全体として、より高剛性に且つより伸び難くなる。これにより、再張力付与又は交換が必要となるまでの前記駆動エレメントの寿命が延びる。
図18では、駆動エレメントA1,A2,B1,C1の前記スポークが、それぞれA1s,A2s,B1s,C1sとして描かれている。図18には、エンドエフェクタ501がシャフト504と一直線状になる前記手術器具の直線状態が描かれている。図18で見て取れるように、駆動エレメントA1の遠位側の可撓部は、前記シャフトの長手方向xに沿った箇所1801にてスポークA1sで終端している。長手方向xは、前記シャフトの長手方向軸心511の方向である。駆動エレメントA2の遠位側の可撓部は、前記シャフトの長手方向xに沿った箇所1802にてスポークA2sで終端している。駆動エレメントB1の遠位側の可撓部は、前記シャフトの長手方向xに沿った箇所1803にてスポークB1sで終端している。駆動エレメントC1の遠位側の可撓部は、前記シャフトの長手方向xに沿った箇所1804にてスポークC1sで終端している。駆動エレメントB2の遠位側の可撓部と駆動エレメントC2の遠位側の可撓部とは、図17aで見て取れるように、前記シャフトのさらに近位端部側にてそれぞれのスポークで終端している。
図18から見て取れるように、前記器具が図示の直線状態にあるとき、前記駆動エレメントの遠位側の可撓部が前記スポークの遠位端部で終端する長手方向位置1801,1802,1803,1804は一致しない。むしろ、長手方向位置1801,1802,1803,1804は互いにオフセットしている。すなわち、前記器具が直線状態にあるとき、前記駆動エレメントの前記スポークの遠位端部同士が前記シャフトの長手方向に沿ってオフセットしている。具体的に述べると、直線状態では、隣接し合うスポークの遠位端部同士が前記シャフトの長手方向に沿ってオフセットしている。互いに隣接しないスポークの遠位端部同士については、直線状態において前記シャフトの長手方向に沿って一致していてもよい。例えば、図18では、隣接し合わないスポークA1s,A2sがいずれも、前記シャフトの長手方向に沿った同じ箇所1801,1802にて終端している。好適には、前記手術器具のどのような状態においても、前記駆動エレメントの前記スポークの遠位端部同士が、前記シャフトの長手方向に沿ってオフセットしている。具体的に述べると、好適には、前記手術器具のどのような状態においても、隣接し合うスポークの遠位端部同士が、前記シャフトの長手方向に沿ってオフセットしている。
図16に関して既述したように、前記駆動エレメントが前記シャフトの遠位端部での前記プーリ機構から前記器具インターフェース内の前記プーリ機構へと中間プーリに巻かれることなく直接渡されている一応用例では、前記駆動エレメントが全て前記シャフト内で互いに平行に延びているのではない。前記第1の対の駆動エレメントの第1の駆動エレメントA1は前記シャフト内において、前記第1の対の駆動エレメントの第2の駆動エレメントA2と略平行に延びている。駆動エレメントA1と駆動エレメントA2とは、前記関
節部から前記器具インターフェースへの方向において、前記シャフトの長さにわたって若干互いに接近しているものであり得る。第2の対の駆動エレメントB1の第1の駆動エレメントB1は前記シャフト内において、前記第2の対の駆動エレメントの第2の駆動エレメントB2に対して傾いて延びている。駆動エレメントB1は、さらに、前記シャフト内を駆動エレメントA1、駆動エレメントA2、駆動エレメントC1及び駆動エレメントC2に対して傾いて延びている。駆動エレメントB2は、前記シャフト内を駆動エレメントA1、駆動エレメントA2、駆動エレメントC1及び駆動エレメントC2に対して傾いて延びている。第3の対の駆動エレメントの第1の駆動エレメントC1は前記シャフト内において、第3の対の駆動エレメントの第2の駆動エレメントC2に対して傾いて延びている。駆動エレメントC1は、さらに、前記シャフト内を駆動エレメントA1、駆動エレメントA2、駆動エレメントB1及び駆動エレメントB2に対して傾いて延びている。駆動エレメントC2は、前記シャフト内を駆動エレメントA1、駆動エレメントA2、駆動エレメントB1及び駆動エレメントB2に対して傾いて延びている。
前記スポークの遠位端部の長手方向位置は、前記器具が回動されたときに当該スポーク同士が衝突することのないように選択されている。前記スポークの直径は前記可撓部よりも大きいので、当該可撓部同士は前記シャフト内へと互いに衝突することなく延びることができても、前記スポーク同士については前記シャフト内において互いに衝突することなく延びることができない可能性がある。好適には、前記器具の直線状態での前記スポークの遠位端部の長手方向位置は、前記エンドエフェクタのどのような形態においても、いずれの駆動エレメントのどの部分も別の駆動エレメントのどの部分にも接触しないような長手方向位置に設定される。好適には、直線状態での前記スポークの近位端部の位置及び遠位端部の位置は、前記駆動エレメント同士が接触しないという条件を満足しながら当該スポークの長さを最大限に長くするように選択されている。前記スポークは、前記可撓部よりも高剛性である。よって、そのような構成により、前記駆動エレメントの剛性を、当該駆動エレメントが前記関節部内の及び器具インターフェース内の部品に巻かれることを可能にしつつ最大限に高めることができる。そのような構成により、前記駆動エレメントの強度を、当該駆動エレメントが前記関節部内の及び器具インターフェース内の部品に巻かれることを可能にしつつ最大限に強くすることができる。
図19aでは、駆動エレメントA1,A2,B1,C1の前記スポークが、それぞれA1s,A2s,B1s,C1sとして描かれている。図19aには、エンドエフェクタ501がシャフト504と一直線状にならない前記手術器具の非直線状態が描かれている。図19aで見て取れるように、駆動エレメントA1の近位側の可撓部は、前記シャフトの長手方向xに沿った箇所1901にてスポークA1sで終端している。長手方向xは、前記シャフトの長手方向軸心511の方向である。駆動エレメントA2の近位側の可撓部は、前記シャフトの長手方向xに沿った箇所1904にてスポークA2sで終端している。駆動エレメントB1の近位側の可撓部は、前記シャフトの長手方向xに沿った箇所1902にてスポークB1sで終端している。駆動エレメントC1の近位側の可撓部は、前記シャフトの長手方向xに沿った箇所1903にてスポークC1sで終端している。駆動エレメントB2の近位側の可撓部と駆動エレメントC2の近位側の可撓部とは、図17aで見て取れるように、前記シャフトのさらに遠位端部側にてそれぞれのスポークで終端している。図示の例の駆動エレメントB2,C2のように、前記スポークは前記シャフト内にて近位側の可撓部で終端するものとされてもよい。図示の例の駆動エレメントA1,A2,B1,C1のように、前記スポークは前記器具インターフェース内にて近位側の可撓部で終端するものとされてもよい。一部のスポークが前記シャフト内にて近位側の可撓部で終端して、かつ、一部のスポークが前記器具インターフェース内にて近位側の可撓部で終端するものとされてもよい。図19aに示す前記器具インターフェースの構造では、駆動エレメントB2及び駆動エレメントC2が、前記シャフトから前記器具インターフェースへと進入するや否やプーリに係合しているので、駆動エレメントB2の前記スポーク及び駆
動エレメントC2の前記スポークは、近位側の可撓部がそのようにプーリに係合できるように前記シャフト内にて当該近位側の可撓部で終端している(図示せず)。駆動エレメントA1,A2,B1,C1はいずれも、前記器具インターフェース内へと幾らかの距離延びてから当該器具インターフェースの部品に係合しているので、駆動エレメントA1,A2,B1,C1の前記スポークは、当該器具インターフェース内へと延出することが可能とされている。
図19aで見て取れるように、前記駆動エレメントの近位側の可撓部が前記スポークの近位端部で終端する長手方向位置1901,1902,1903,1904は一致しない。むしろ、長手方向位置1901,1902,1903,1904は互いにオフセットしている。すなわち、前記器具が図示の形態にあるとき、前記駆動エレメントの前記スポークの近位端部同士が前記シャフトの長手方向に沿ってオフセットしている。好適には、前記器具が直線状態であるとき、前記駆動エレメントの前記スポークの近位端部同士が前記シャフトの長手方向に沿ってオフセットしている。具体的に述べると、直線状態では、隣接し合うスポークの近位端部同士が前記シャフトの長手方向に沿ってオフセットしている。互いに隣接しないスポークの近位端部同士については、直線状態において前記シャフトの長手方向に沿って一致していてもよい。例えば、図19aでは、隣接し合わないスポークB1s,C1sがいずれも、前記シャフトの長手方向に沿った同じ箇所1902,1903にて終端している。好適には、前記手術器具のどのような状態においても、前記駆動エレメントの前記スポークの近位端部同士が、前記シャフトの長手方向に沿ってオフセットしている。具体的に述べると、好適には、前記手術器具のどのような状態においても、隣接し合うスポークの遠位端部同士が、前記シャフトの長手方向に沿ってオフセットしている。
前記スポークの近位端部の長手方向位置は、前記器具が回動されたときに当該スポーク同士が衝突することのないように選択されている。好適には、前記器具の直線状態での前記スポークの近位端部の長手方向位置は、前記エンドエフェクタのどのような形態においても、いずれの駆動エレメントのどの部分も別の駆動エレメントのどの部分にも接触しないような長手方向位置に設定される。
各対の駆動エレメントは、前記器具インターフェース内において単一の器具インターフェースエレメントに係合する。それぞれの駆動エレメントが、前記器具インターフェース内において器具インターフェースエレメントに係合する。図19a、図19b及び図19cに示す例では、それぞれの駆動エレメントが、当該それぞれの駆動エレメントごとの器具インターフェースエレメントに係合している。一つ一つの器具インターフェースエレメントが、一対の駆動エレメントを駆動している。それぞれの駆動エレメントは、単一の器具インターフェースによって互いに独立して駆動される。代替的な配置構成では、複数の器具インターフェースエレメントが一つの駆動エレメントを駆動する複合駆動動作、一つの器具インターフェースエレメントが複数対の駆動エレメントを駆動する複合駆動動作、あるいは、複数の器具インターフェースエレメントが協働して複数の駆動エレメントを駆動する複合駆動動作が設けられてもよい。
図19bには、第1の対の駆動エレメントA1,A2に係合する第1の器具インターフェースエレメント1905が描かれている。第2の器具インターフェースエレメント1906が、第2の対の駆動エレメントB1,B2に係合する。第3の器具インターフェースエレメント1907が、第3の対の駆動エレメントC1,C2に係合する。好適には、それぞれの駆動エレメントは、当該それぞれの駆動エレメントに対応付けられた器具インターフェースエレメントへと固定されている。すなわち、それぞれの駆動エレメントは、当該それぞれの駆動エレメントに対応付けられた器具インターフェースエレメントに固定されている。
器具インターフェース1701のプロファイルは、器具シャフト504よりも著しく大きい。典型的には、前記器具シャフトが5mm以下の直径の円状断面を有している一方で、前記器具インターフェースの対応する断面はこれよりも大きいものであり得る。前記器具インターフェースは、内側部位と外側部位とを有している。当該内側部位は、破線1950(図19a及び図19bに描かれている)により境界決めされている。前記外側部位は、前記器具インターフェースの前記内側部位に含まれない残りの部分である。前記内側部位は、前記シャフトの投影プロファイルの内側になる。すなわち、前記内側部位は、前記器具インターフェースの、前記シャフトのプロファイルが当該器具インターフェース内にまで続いていたとすれば含まれていたであろう部分である。前記外側部位は、前記シャフトの前記投影プロファイルの外側になる。図示の例では、前記シャフトが一定の円状断面を有しているので、前記内側部位は当該シャフトと同一の円状断面を有し且つ当該シャフトと同一の長手方向軸心511を有する円筒となる。すなわち、前記内側部位は、前記シャフトのそのような一定の断面を、前記器具インターフェース内にまで外挿したものである。内側部位1950は、図19aでは側方から、図19bでは上方から描かれている。
器具インターフェースエレメント1905,1906,1907は、図19bで示すように前記器具インターフェースの幅にわたって分散配置されている。図19bに示す配置構成では、一つの器具インターフェースエレメント1905が、前記器具インターフェースの内側部位1950内に存在している。具体的に述べると、器具インターフェースエレメント1905の前記駆動エレメントと係合する部分が、前記器具インターフェースの内側部位1950内に存在している。器具インターフェースエレメント1905は全体として、図19bに示すように、実質的に前記器具インターフェースの内側部位1950内に存在しているものであり得る。器具インターフェースエレメント1905は全体として、完全に前記器具インターフェースの内側部位1950内に存在しているものとされてもよい。好適には、器具インターフェースエレメント1905は、シャフト504の長手方向軸心511と整合している。例的な一配置構成では、前記器具インターフェースの前記内側部位内に、器具インターフェースエレメントが1つしか配置されていない。残りの器具インターフェースエレメント1906,1907は、前記器具インターフェースの前記外側部位内に存在している。これら残りの器具インターフェースエレメント1906,1907は、上記のように整合している器具インターフェースエレメント1905の両側に配置されている。具体的に述べると、これら残りの器具インターフェースエレメント1906,1907は、上記のように整合している器具インターフェースエレメント1905の両側に、前記シャフトの長手方向軸心511と直交する方向で配置されている。器具インターフェースエレメント1906,1907は、シャフト504の長手方向軸心511と整合していない。器具インターフェースエレメント1906,1907は、それぞれレール1929、レール1930に沿って移動するように拘束されていることにより、シャフト504の長手方向軸心511と平行に移動するように拘束されている。
器具インターフェースエレメント1905は、第1の対の駆動エレメントA1,A2と係合する。図19aで見て取れるように、前記シャフトの近位端部と前記器具インターフェース1905との間において対の駆動エレメントA1,A2は、完全に内側部位1950内に位置している。前記シャフトの近位端部と器具インターフェースエレメント1905との間において対の駆動エレメントA1,A2は、全体が当該シャフト511の長手方向軸心と平行に配されている。好適には、前記器具インターフェース内において前記シャフトの近位端部と器具インターフェースエレメント1905との間に、周りを対の駆動エレメントA1,A2が動くように拘束されている中間プーリ又は他の構造体が存在していない。好適には、前記器具インターフェースの内側部位1950内で対の駆動エレメントA1,A2と係合しているのは、一つの器具インターフェースエレメント1905のみで
ある。
器具インターフェースエレメント1906が、第2の対の駆動エレメントB1,B2と係合する。器具インターフェースエレメント1906は、前記器具インターフェースの前記外側部位内において第2の対の駆動エレメントB1,B2と係合する。
器具インターフェースエレメント1907が、第3の対の駆動エレメントC1,C2と係合する。器具インターフェースエレメント1907は、前記器具インターフェースの前記外側部位内において第3の対の駆動エレメントC1,C2と係合する。
前記駆動エレメントを、前記外側部位内にある前記器具インターフェースエレメントへと係合するようにシフトさせるのに、プーリ機構が用いられる。各対の駆動エレメントは、第1の対のプーリに係合することによって自身を、シャフト504の近位端部から当該各対の駆動エレメントのそれぞれの器具インターフェースエレメントへとシフトさせ、かつ、第2の対のプーリに係合することによって自身を、その器具インターフェースエレメントとの整合状態からシャフト504との整合状態へと再シフトさせる。
図示の配置構成では、第2の対の駆動エレメントB1,B2が前記シャフトの近位端部から、当該シャフトと整合した方向に進行する。駆動エレメントB1,B2は、図16に関して説明した方向変化の結果として、シャフト504の長手方向軸心511と厳密には平行に延びていない。その後、第2の対の駆動エレメントB1,B2は、プーリ対1908,1909の周りを移動するように拘束されており、これによって自身を、自身がシャフト504外に進行した箇所から第2の器具インターフェースエレメント1906との係合状態へとシフトさせる。第2の対の駆動エレメントB1,B2はプーリ対1908,1909から、当該第2の対の駆動エレメントB1,B2が前記シャフトの近位端部から進行した方向と平行かつ当該方向からオフセットしている方向に進行する。第2の対の駆動エレメントB1,B2は、プーリ対1910,1911の周りを移動するように拘束されており、これによって自身を、第2の器具インターフェースエレメント1906との整合状態からシャフト504との整合状態へとシフトさせる。
図示の配置構成では、第3の対の駆動エレメントC1,C2が前記シャフトの近位端部から、当該シャフトと整合した方向に進行する。駆動エレメントC1,C2は、図16に関して説明した方向変化の結果として、シャフト504の長手方向軸心511と厳密には平行に延びていない。その後、第3の対の駆動エレメントC1,C2は、プーリ対1912,1913の周りを移動するように拘束されており、これによって自身を、自身がシャフト504外に進行した箇所から第3の器具インターフェースエレメント1907との係合状態へとシフトさせる。第3の対の駆動エレメントC1,C2はプーリ対1912,1913から、当該第3の対の駆動エレメントC1,C2が前記シャフトの近位端部から進行した方向と平行かつ当該方向からオフセットしている方向に進行する。第3の対の駆動エレメントC1,C2は、プーリ対1914,1915の周りを移動するように拘束されており、これによって自身を、第3の器具インターフェースエレメント1907との整合状態からシャフト504との整合状態へとシフトさせる。
図19a、図19b及び図19cに示す配置構成では、対の駆動エレメントA1,A2が、前記内側部位内にある第1の器具インターフェースエレメント1905に係合する。対の駆動エレメントA1,A2は、前記関節部(したがって、前記エンドエフェクタ)を第1の軸心510(図5aを参照)回りに回転させる。第1のジョイント506を中心とした運動の範囲は、第2のジョイント507及び第3のジョイント513を中心とした運動の範囲よりも小さい。後述するように、第1の器具インターフェースエレメント1905は、最大距離d1から当該第1の器具インターフェースエレメント1905の長さを引
いた距離だけ直線状変位可能である。この距離は、第2の器具インターフェースエレメント1906の最大変位d2から当該第2の器具インターフェースエレメント1906の長さを引いたものよりも短く、かつ、第3の器具インターフェースエレメント1907の最大変位d3から当該第3の器具インターフェースエレメント1907の長さを引いたものよりも短い。このように、第1のジョイント506を中心とした運動を制御する際の前記器具インターフェースエレメントの移動範囲は、前記第2および第3のジョイントを中心とした運動を制御する際の前記器具インターフェースエレメントの移動範囲よりも短いので、その移動の感度は高いほうが好ましい。ケーブルは、プーリ上で滑りおよび/または伸びを生じ得る。そのため、前記第1の器具インターフェースエレメントと第1のジョイント506との間で動きを伝達させるためのケーブル配設は、出来る限り単純であるのが好ましい。第1の器具インターフェースエレメント1905を前記内側部位内において前記シャフトの長手方向軸心511上に配置することにより、前記第1の対の駆動エレメントは、第1のジョイント506と第1の器具インターフェースエレメント1905との間において中間プーリの周りを経由するように拘束されずに済む。
それぞれの器具インターフェースエレメントは、前記器具インターフェース内で変位可能とされている。それぞれの器具インターフェースエレメントは、対応する対の駆動エレメントに固定されているので、当該器具インターフェースエレメントの変位は、その対の駆動エレメントの変位として伝達される。好適には、それぞれの器具インターフェースエレメントは、当該それぞれの器具インターフェースエレメントが固定されている前記対の駆動エレメントの直線と同じ直線に沿って変位可能とされている。それぞれの器具インターフェースエレメントは、前記ロボットアームの対応する駆動アセンブリインターフェースエレメントへと係合する。これにより、前記器具インターフェースエレメントの変位が、前記ロボットアームによって駆動される。このようにして、前記ロボットアームが、前記対の駆動エレメントを駆動させる。
各対の駆動エレメントは、前記器具インターフェース内において器具インターフェースエレメントに係合している。当該対の駆動エレメントは、さらに、張力付与機構及び位置合わせ機構に係合している。当該張力付与機構は、前記器具を製造するときに前記対の駆動エレメントの所望の張力を実現するのに用いられる。前記位置合わせ機構は、前記器具インターフェースエレメントを、前記エンドエフェクタが所定の形態に設定されているときの前記シャフトの長手方向における所定の位置合わせ位置に設定するのに用いられる。それぞれの器具インターフェースエレメントは、当該それぞれの器具インターフェースエレメントが変位可能である変位範囲を有している。前記所定の位置合わせ位置は、それぞれの器具インターフェースエレメントの前記変位範囲の中間点であり得る。前記エンドエフェクタの前記所定の形態は、前記エンドエフェクタエレメント同士が互いに閉じられて(例えば、前記ジョー同士が閉じられて)且つ前記関節部の長手方向軸心及び当該エンドエフェクタの長手方向軸心が前記シャフトの長手方向軸心511と揃っている直線状態であり得る。前記器具インターフェースエレメントを前記エンドエフェクタが所定の形態に設定されているときの所定の位置合わせ位置に設定することにより、手術中に器具を取り替えたときにこの新しい器具を使用可能な状態にセットアップするのにかかる時間が短縮され得る。実際に、ロボットアームアセンブリは、前記ロボットアームから器具が取り外されると、前記所定の位置合わせ位置に配された前記器具インターフェースエレメントを収容することができる配置形態へと移行するように構成されているものであり得る。例えば、前記ロボットアームアセンブリのインターフェースエレメントは、それぞれの前記器具インターフェースエレメントを当該それぞれの器具インターフェースエレメントの変位範囲の中間点で収容するように配置されることになる初期位置へと移行し得る。そして、前記器具が、手動で前記所定の形態に設定されてから前記ロボットアームへと装着される。例えば、助手が、前記関節部及びエンドエフェクタを直線状態へと動かしてから前記器具を前記ロボットアームへと装着する。前記器具が前記所定の形態にあるときには前記器
具インターフェースエレメントが前記所定の位置合わせ位置を取っていることが分かっているので、当該器具インターフェースエレメントは前記ロボットアームアセンブリのインターフェースエレメントに直接係合させられる。制御システムは、前記エンドエフェクタが前記所定の形態であることが分かっているので、当該エンドエフェクタの位置及び向きをマップするために追加のキャリブレーションやソフトウェアセットアップ手順を実行する必要がない。
以下では、互いに独立している張力付与機構及び位置合わせ機構について説明する。前記張力付与機構と前記位置合わせ機構とを別々にすることにより、所望の張力及び所望の位置合わせを実現するための手順を簡単にすることができる。これにより、製造時に所望の張力及び所望の位置合わせを実現するのにかかる時間を短縮することができる。
図19a、図19b及び図19cには、プーリを利用した張力付与機構が描かれている。各対の駆動エレメントは、互いに独立して張力付与される。各対の駆動エレメントは、変位可能なプーリの周りを移動するように拘束されている。図19a、図19b及び図19cには、前記対の駆動エレメントに張力付与するためのプーリ機構として、2種類の相異なる例的なプーリ機構が描かれている。いずれの例におけるプーリも、直線状変位可能とされている。
初めに、対の駆動エレメントB1,B2及び対の駆動エレメントC1,C2についての図示の張力付与機構に関して言及する。まず、対の駆動エレメントB1,B2に注目すると、プーリ1911が、当該対の駆動エレメントB1,B2に張力付与するために用いられる。プーリ1911は、前記シャフトの長手方向軸心511と平行な変位軸心1920に沿って直線状変位可能である。変位軸心1920は、前記シャフトの長手方向軸心511からオフセットしている。変位軸心1920は、図19bに描かれている。張力付与プーリ1911は、レール1919に沿って摺動可能なブロック1918に取り付けられている。ブロック1918がレール1919に沿ってスライドすることにより、プーリ1911が変位軸心1920に沿って変位する。ブロック1918が前記シャフトから遠ざかるように動かされると、第2の対の駆動エレメントB1,B2の張力が増加する。ブロック1918が前記シャフトに向かって動かされると、第2の対の駆動エレメントB1,B2の張力が減少する。当該ブロックを動かすのに、適切な機構であればどのような機構が用いられてもよい。例えば、ねじ調節機構が用いられてもよい。図19a、図19b及び図19cには、ねじ1921がブロック1918に螺合したねじ調節機構が描かれている。これは、図19aで最も明確に見て取れる。ねじ1921は、当該ねじ1921が回ることはできるが直線状変位されることはできないように、前記器具インターフェースの部位1922により拘束されている。これにより、前記ねじが回されると、当該ねじのねじ部がブロック1918内のねじ部に係合していることから当該ブロック(したがって、プーリ1911)を直線状変位させる。ねじ1921が締められると、プーリ1911は一方の直線方向に動く。ねじ1921が緩められると、プーリ1911は反対の直線方向に動く。図19a、図19b及び図19cに描かれている駆動エレメントC1,C2についての張力付与機構も、駆動エレメントB1,B2に関して説明したものと対応する様式で動作する。
次に、図19aに描かれている第1の対の駆動エレメントA1,A2についての張力付与機構に関して言及する。プーリ1923が、当該対の駆動エレメントA1,A2に張力付与するために用いられる。プーリ1923は、変位軸心1924に沿って直線状変位可能である。変位軸心1924は、前記シャフトの長手方向軸心511に対して傾いている。好適には、変位軸心1924は、前記シャフトの長手方向軸心511に対して45°の角度をなすものであり得る。張力付与プーリ1923は、前記器具インターフェースのソケット1926内に取り付けられているブロック1925に取り付けられている。ブロッ
ク1925及び張力付与プーリ1923は、ソケット1926内を摺動することができる。ブロック1925がソケット1926内を摺動することにより、前記プーリが変位軸心1924に沿って変位する。ブロック1925が前記ソケット内へとさらに摺動されると、第1の対の駆動エレメントA1,A2の張力が増加する。ブロック1925が前記ソケット外へと摺動されると、第1の対の駆動エレメントA1,A2の張力が減少する。ブロック1925を動かすのに、適切な機構であればどのような機構が用いられてもよい。例えば、ブロック1918に関して前述したねじ調節機構が用いられてもよい。第1の対の駆動エレメントA1,A2は、当該第1の対の駆動エレメントA1,A2同士が互いにほぼ平行に延びるように張力付与プーリ1923の周りのほぼ全体に巻かれているため、前記第2の対の駆動エレメント及び第3の対の駆動エレメントに関して説明した張力付与機構と比べて、張力付与プーリの単位変位あたりに加わる張力が大きくなる。
図19a、図19b及び図19cには、前記第1の対の駆動エレメントが斜めの張力付与機構を利用し、前記第2の対の駆動エレメントと第3の対の駆動エレメントとが直線の張力付与機構を利用している様子が描かれているが、いずれの対の駆動エレメントも、前記器具インターフェース内に収まる適切な機構であればどのような機構を用いて張力付与されるものであってもよい。
図20aには、代替的な張力付与機構が示されている。各対の駆動エレメントは、器具インターフェースエレメントのラグ1927(図19cを参照)で終端している。図20aには、図19cに描かれたラグ1927についての代替的な一配置構成が描かれている。図20aの配置構成では、当該ラグが前記張力付与機構に利用されている。図20aの当該ラグは、一対のラグエレメント2001,2002を有している。一対の駆動エレメントの一方の駆動エレメントが一方のラグエレメントで終端しており、当該一対の駆動エレメントの他方の駆動エレメントが他方のラグエレメントで終端している。同図では、第3の対の駆動エレメントの第1の駆動エレメントC1がラグエレメント2001で終端しており、第3の対の駆動エレメントの第2の駆動エレメントC2がラグエレメント2002で終端している。前記一対のラグエレメント同士は、相対的に直線状変位可能であるように接続されている。好適には、前記一対のラグエレメントは、当該一対のラグエレメントが取り付けられている前記一対の駆動エレメントの方向yに沿って直線状変位可能である。好適には、前記一対のラグエレメントは、前記シャフトの長手方向軸心511と平行かつ当該長手方向軸心511からオフセットしている変位軸心に沿って変位可能である。ラグエレメント2001とラグエレメント2002とは、当該ラグエレメント同士を前記変位軸心に沿って相対的に移動させることが可能である適切な機構であれば、どのような機構により接続されているものであってもよい。例えば、前記ラグエレメント同士は、ねじ2003によって互いに接続され得る。ねじ2003は、第1のラグエレメント2002に取り付けられており、かつ、当該ねじ2003の当該第1のラグエレメント2002に対する直線状変位が妨げられるように当該第1のラグエレメント2002により拘束されている。例えば、前記ねじは図20aに描かれているように、前記第1のラグエレメントにおける孔へと当該ねじが回ることができるように挿通され得て、かつ、前記第1のラグエレメント内を直線状変位しないように前記第1のラグエレメントにおけるその孔よりも大径である2つの部位2004,2005によって拘束され得る。ねじ2003は、第2のラグエレメント2001に貫通螺合している。これにより、ラグエレメント2001,2002は、前記ねじが締められると互いに向かって直線状変位し、前記ねじが緩められると互いから離れるように直線状変位する。
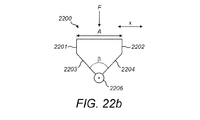
図20bには、さらなる代替的な張力付与機構が示されている。図20bには、図19cに描かれたラグ1927についてのさらなる代替的な配置構成が描かれている。図20bの配置構成では、当該ラグが前記張力付与機構に利用されている。図20bの当該ラグは、一対のラグエレメント2006,2007を有している。一対の駆動エレメントの一
方の駆動エレメントが一方のラグエレメントで終端しており、当該一対の駆動エレメントの他方の駆動エレメントが他方のラグエレメントで終端している。同図では、第3の対の駆動エレメントの第1の駆動エレメントC1がラグエレメント2006で終端しており、第3の対の駆動エレメントの第2の駆動エレメントC2がラグエレメント2007で終端している。前記一対のラグエレメント同士は、相対的に直線状変位可能であるように接続されている。好適には、前記一対のラグエレメントは、当該一対のラグエレメントが取り付けられている前記一対の駆動エレメントの方向yに沿って直線状変位可能である。好適には、前記一対のラグエレメントは、前記シャフトの長手方向軸心511と平行かつ当該長手方向軸心511からオフセットしている変位軸心に沿って変位可能である。ラグエレメント2006とラグエレメント2007とは、当該ラグエレメント同士を前記変位軸心に沿って相対的に移動させることが可能である適切な機構であれば、どのような機構により接続されているものであってもよい。例えば、前記ラグエレメント同士は、ねじ2008によって互いに接続され得る。ねじ2008は、第1のラグエレメント2007に収容されており、かつ、当該ねじ2008が当該第1のラグエレメント2007に対して直線状変位しないように当該第1のラグエレメント2007により拘束されている。例えば、前記ねじは図20bに描かれているように、前記第1のラグエレメントにおける孔へと当該ねじが回ることができるように挿通され得て、かつ、前記第1のラグエレメント内を直線状変位しないように前記第1のラグエレメントにおけるその孔よりも大径である2つの部位2009,2010によって拘束され得る。ねじ2008は、第2のラグエレメント2006に貫通螺合している。これにより、ラグエレメント2006,2007は、前記ねじが締められると互いに向かって直線状変位し、前記ねじが緩められると互いから離れるように直線状変位する。
図19cを参照する。それぞれの器具インターフェースエレメント1905,1906,1907は、前記シャフトの長手方向軸心511と平行に直線状変位可能である。当該器具インターフェースエレメントは、直線レールに沿って摺動可能なものであり得る。例えば、第1の器具インターフェースエレメント1905がレール1928に沿って摺動可能であり、第2の器具インターフェースエレメント1906がレール1929に沿って摺動可能であり、第3の器具インターフェースエレメント1907がレール1930に沿って摺動可能である。それぞれの器具インターフェースエレメントは、最小変位位置と最大変位位置との間の変位範囲にわたって変位されることが可能である。例えば、前記最小変位位置及び最大変位位置は、前記器具インターフェースエレメントが前記シャフトの長手方向xにスライドする前記レールの端部により決まり得る。図19b及び図19cでは、第2及び第3の器具インターフェースエレメント1906,1907についての前記最小変位位置と最大変位位置とに符号1931、1932が付されている。図19bでは、第1の器具インターフェースエレメント1905についての前記最小変位位置と最大変位位置とに符号1931、1943が付されている。前記第1の器具インターフェースエレメントは、最大距離d1から前記方向xにおける当該第1の器具インターフェースエレメントの長さを引いた距離だけ直線状変位可能である。前記第2の器具インターフェースエレメントは、最大距離d2から前記方向xにおける当該第2の器具インターフェースエレメントの長さを引いた距離ぶん直線状変位可能である。前記第3の器具インターフェースエレメントは、最大距離d3から前記方向xにおける当該第3の器具インターフェースエレメントの長さを引いた距離ぶん直線状変位可能である。好適には、d1<d2かつd1<d3である。好適には、d2=d3である。
好適には、前記エンドエフェクタが前記シャフトと一直線状になる前記器具の直線状態では、第1の器具インターフェースエレメント1905、第2の器具インターフェースエレメント1906及び第3の器具インターフェースエレメント1907がいずれも、前記シャフトの長手方向軸心に直交する共通の平面内に位置している。変形例として、前記器具の直線状態において第1の器具インターフェースエレメント1905の中央が位置する
平面が、第2の器具インターフェースエレメント1906及び第3の器具インターフェースエレメント1907の中央が位置する平面と異なる平面内に位置しているものとされてもよい。これは、d1にわたる第1の器具インターフェースエレメント1905の移動の中間点が、d2にわたる第2の器具インターフェースエレメント1906の移動の中間点及びd3にわたる第3の器具インターフェースエレメント1907の移動の中間点からオフセットしているからである。
好適には、それぞれの器具インターフェースエレメントは、ボディ1933,1934,1935およびラグ1927,1936,1937を有している。ボディ1933,1934,1935は、前記器具インターフェースエレメントの前記最小変位位置と前記最大変位位置との間で直線状変位可能である。前記器具インターフェースエレメントに係合する前記対の駆動エレメントは、当該器具インターフェースエレメントの前記ラグに固定されている。当該ラグは前記ボディ内で、当該ボディが変位可能である方向と平行に直線状変位可能である。好適には、前記ラグは、前記シャフトの長手方向xに沿って当該シャフトの長手方向軸心511と平行に直線状変位可能である。前記位置合わせ機構は前記ボディの変位位置を、前記ラグを変位させることなく調節する。例えば、前記位置合わせ機構は、前記ボディ及びラグに接続されて当該ボディが移動することを当該ラグを移動させることなく可能にするねじ調節機構を含み得る。図19cに、このようなねじ調節機構が描かれている。ボディ1933,1935は、当該ボディが変位可能である方向と並んで配置されたスロット1938,1939を有している。ねじ1940,1941が、スロット1938,1939を通って前記ラグに螺合している。ねじ1940,1941は、当該スロットに沿って摺動するように拘束されている。例えば、前記ねじのヘッドは当該スロットを通り抜けるには大き過ぎるものとされ得て、かつ、前記ねじの本体は当該スロットに遊嵌し得る。これにより、前記ねじが緩いときには、前記本体が前記ラグに対して前記スロットの幅に沿って変位することができる。前記ねじが締まっているときには、前記本体が前記ラグに固定される。このようにして、前記ボディと前記ラグとの相対位置が前記スロットの幅分調節されることが可能となる。
以下では、製造時に前記器具を組み付けた後、前記駆動エレメントの張力および前記器具インターフェースエレメントの位置合わせを設定するために実行される過程について説明する。
初めに、前記駆動エレメントから前記器具インターフェースが緩められる。前記器具インターフェースエレメントが、前記位置合わせ位置に設定される。例えば、それぞれの器具インターフェースエレメントが当該それぞれの器具インターフェースエレメントの変位範囲にわたる当該それぞれの器具インターフェースエレメントの移動の中間点にあるときが前記位置合わせ位置である場合には、それら器具インターフェースエレメントがこれらの位置に位置合わせされる。この最初の過程は、前記器具インターフェースエレメントの、当該器具インターフェースエレメントの位置合わせ位置への粗位置合わせであってもよい。変形例として、この最初の過程は実行されなくてもよい。次に、前記エンドエフェクタが前記所定の形態に設定される。次に、前記対の駆動エレメントが張力付与される。これは、本明細書で説明するどの前記張力付与機構を用いて行われてもよく、例えば、張力付与プーリをレールに沿ってスライドさせる又はソケット内で摺動させること、一対のラグエレメント同士を変位させること等によって行われる。次に、前記位置合わせ機構を用いて、張力付与済みの前記器具インターフェースエレメントの変位位置が前記所定の位置合わせ位置に設定される。例えば図19a、図19b及び図19cに示す応用例では、ねじ1940,1941が緩められて前記器具インターフェースエレメントのボディ1933,1935がレール1930,1929に沿って、当該器具インターフェースエレメントの当該ボディが前記所定の位置合わせ位置になるまでラグ1938,1937に対して変位される。前記対の駆動エレメントが張力付与されるあいだ、前記エンドエフェクタは
前記所定の形態に保持され得る。これに代えて、あるいは、これに加えて、前記対の駆動エレメントが張力付与された後に、前記エンドエフェクタが前記所定の形態に戻されるものとされてもよい。次に、前記ねじが締められる。
図21a、図21b及び図21cには、駆動アセンブリインターフェース2100が示されている。当該駆動アセンブリインターフェースは、前記ロボットアームの末端リンクの末端部に存在している。その末端リンクはロールジョイントにより、当該末端リンクの隣りのリンクに連結されている。当該ロールジョイントは、当該末端リンクが当該末端リンクの長手方向軸心2104回りに回転することを可能にする。駆動アセンブリインターフェース2100は、駆動アセンブリインターフェースエレメント2101,2102,2103を含む。当該駆動アセンブリインターフェースエレメントは、器具インターフェースエレメント1905,1906,1907を収容するように構成されている。第1の駆動アセンブリインターフェースエレメント2102は、第1の器具インターフェースエレメント1905を収容するように構成されている。第2の駆動アセンブリインターフェースエレメント2101は、第2の器具インターフェースエレメント1906を収容するように構成されている。第3の駆動アセンブリインターフェースエレメント2102は、第3の器具インターフェースエレメント1907を収容するように構成されている。
それぞれの駆動アセンブリインターフェースエレメントは、前記駆動アセンブリの長手方向軸心2104と平行な方向に沿って変位可能である。それぞれの駆動アセンブリインターフェースエレメントは、変位範囲にわたって変位可能である。図24に示すように前記器具インターフェースが前記駆動アセンブリに係合されると、それぞれの駆動アセンブリインターフェースエレメントは、当該駆動アセンブリインターフェースエレメントが係合した前記器具インターフェースエレメントが変位することのできる方向と同じ方向に変位可能となる。
第1の駆動アセンブリインターフェースエレメント2102は第1の器具インターフェースエレメント1905と、前記駆動アセンブリの長手方向軸心2104上で係合する。これにより、第1の駆動アセンブリインターフェースエレメント1905は、第1の器具インターフェースエレメント1905を前記駆動アセンブリの長手方向軸心に沿って、したがって、前記ロボットアームの前記末端リンクの長手方向軸心に沿って駆動させる。好適には、前記駆動アセンブリ内の全ての前記駆動アセンブリインターフェースエレメントのうち、第1の駆動アセンブリインターフェースエレメント2102のみが、前記末端リンクの長手方向軸心2104に沿って変位可能とされる。第1の器具インターフェースエレメント1905は、第1の対の駆動エレメントA1,A2を駆動させることによって、前記器具の遠位端部を器具シャフト軸心511と直交する第1の軸心510回りに回転させる。器具インターフェース1701が駆動アセンブリ2100に係合されると、前記器具シャフトの長手方向軸心511が前記末端リンクの長手方向軸心2104と平行になる。好適には、前記器具シャフトの長手方向軸心511が前記末端リンクの長手方向軸心2104と一致する。
第2の駆動アセンブリインターフェースエレメント2101は第2の器具インターフェースエレメント1906と、前記駆動アセンブリの長手方向軸心2104と平行かつ当該長手方向軸心2104からオフセットしている軸心上で係合する。第2の駆動アセンブリインターフェースエレメント2101はこの軸心に沿って、第2の器具インターフェースエレメント1906をこの軸心に沿って駆動させるように変位可能とされる。第2の器具インターフェースエレメント1906は、第2の対の駆動エレメントB1,B2を駆動させることによって、エンドエフェクタエレメント502を第2のジョイント507を中心として回転させる。
第3の駆動アセンブリインターフェースエレメント2103は第3の器具インターフェースエレメント1907と、前記駆動アセンブリの長手方向軸心2104と平行かつ当該長手方向軸心2104からオフセットしている軸心上で係合する。第3の駆動アセンブリインターフェースエレメント2103はこの軸心に沿って、第3の器具インターフェースエレメント1907をこの軸心に沿って駆動させるように変位可能とされる。第3の器具インターフェースエレメント1907は、第3の対の駆動エレメントC1,C2を駆動させることによって、エンドエフェクタエレメント503を第3のジョイント513を中心として回転させる。
好適には、前記駆動アセンブリインターフェースエレメントは、対応する前記器具インターフェースエレメントと切離し可能に係合する。
図21a、図21b及び図21cには、前記駆動アセンブリ内での前記駆動アセンブリインターフェースエレメントの直線状変位を駆動させる例的な機構が描かれている。それぞれの駆動アセンブリインターフェースエレメント2101,2102,2103は、各々のねじ部付き駆動軸2105,2106,2107により駆動される。好適には、前記第1、第2および第3の駆動アセンブリインターフェースエレメントは、前記駆動軸によって互いに独立して駆動される。ガイド構造体がそれぞれの駆動アセンブリインターフェースエレメントを拘束していることにより、対応する駆動軸が回転されるときに当該駆動アセンブリインターフェースエレメントが回転することを防ぐ。例えば、ガイドレールがそれぞれの駆動アセンブリインターフェースエレメントを拘束していることにより、対応する駆動軸が回転されるときに当該駆動アセンブリインターフェースエレメントが回転することを防ぐ。当該ガイドレールは前記駆動アセンブリインターフェースエレメントを、当該駆動アセンブリインターフェースエレメントが行うことのできる運動がそのガイドレールと平行な直線運動のみになるように拘束する。前記駆動アセンブリインターフェースエレメントは、例えば、前記ガイドレールに沿ってスライドし得る。図示の応用例では、第1の駆動アセンブリインターフェースエレメント2102と第2の駆動アセンブリインターフェースエレメント2101とがいずれも、同じガイドレール2108によって拘束されている。第3の駆動アセンブリインターフェースエレメント2103は、異なるガイドレール2109によって拘束されている。代替的な一配置構成では、第1の駆動アセンブリインターフェースエレメント2102と第3の駆動アセンブリインターフェースエレメント2103とがいずれも、同じガイドレール2109によって拘束されている。第2の駆動アセンブリインターフェースエレメント2101は、ガイドレール2108によって拘束されている。代替的なさらなる配置構成では、それぞれの駆動アセンブリインターフェースエレメントが、当該それぞれの駆動アセンブリインターフェースエレメントごとのガイドレールによって拘束されている。他の例では、前記ガイド構造体がガイドスロットであり、当該ガイドスロットは前記駆動アセンブリインターフェースエレメントの運動を、当該駆動アセンブリインターフェースエレメントがそのガイドスロットと平行に直線運動することしかできないように拘束する。前記ガイドレールと同様に、前記ガイドスロットは前記駆動アセンブリインターフェースの長手方向2104と平行である。第1の駆動アセンブリインターフェースエレメント2102は、最大距離s1にわたって直線状変位可能である。第2の駆動アセンブリインターフェースエレメント2101は、最大距離s2にわたって直線状変位可能である。第3の駆動アセンブリインターフェースエレメント2103は、最大距離s3にわたって直線状変位可能である。好適には、s1<s2かつs1<s3である。好適には、s2=s3である。
好適には、前記駆動アセンブリの或る形態では第1、第2および第3の駆動アセンブリインターフェース2101,2102,2103がいずれも、前記末端リンクの長手方向軸心2104と直交する共通の平面内に位置している。この形態は、図21a、図21b及び図21cで描かれている形態である。全ての前記駆動アセンブリインターフェースエ
レメントの中央が、前記末端リンクの長手方向軸心2104と直交する単一の断面上に位置している。好適には、この形態でのそれぞれの駆動アセンブリインターフェースエレメントは、当該それぞれの駆動アセンブリインターフェースエレメントの変位範囲にわたる当該それぞれの駆動アセンブリインターフェースエレメントの直線状変位の中間点に存在している。好適には、この形態は、前記ロボットアームから器具が取り外されたときに前記アセンブリインターフェースが取る初期形態である。前述したようにこの形態は、前記器具インターフェースエレメントを当該器具インターフェースエレメントの位置合わせ位置で収容する配置形態である。前記所定の位置合わせ位置は、それぞれの駆動アセンブリインターフェースエレメントが当該それぞれの駆動アセンブリインターフェースエレメントの移動の中間点にあるときの位置であり得る。前記所定の位置合わせ位置は、全ての前記駆動アセンブリインターフェースエレメントの中央点が共通の平面上に存在するときの位置であり得る。
前記駆動アセンブリのどのような形態においても、第2の駆動アセンブリインターフェース2101及び第3の駆動アセンブリインターフェースエレメント2103の中央はいずれも、図21a、図21b及び図21cに示す形態において第1、第2及び第3の駆動アセンブリインターフェースエレメント2102,2102,2103の全ての中央が位置することになる平面と直交する第2の平面内に位置している。この第2の平面は、前記末端リンクの長手方向軸心2104と交わらない。どのような形態においても第1の駆動アセンブリインターフェースエレメント2102の中央は、前記第2の平面と平行かつ当該第2の平面からオフセットしている第3の平面内に位置している。
図21a、図21b及び図21cに示す前記駆動アセンブリが図19a、図19b及び図19cに示す前記器具インターフェースを駆動し、当該器具インターフェースエレメントが図5a及び図5bに描かれた前記第1、第2及び第3のジョイントを駆動し得る。つまり、第1の駆動アセンブリインターフェースエレメント2102が第1のジョイント506を駆動させて、第2の駆動アセンブリインターフェースエレメント2101が第2のジョイント507を駆動させて、第3の駆動アセンブリインターフェースエレメント2103が第3のジョイント513を駆動させる。代替的な一配置構成では、これらの駆動アセンブリインターフェースエレメントが上記とは異なるジョイントを駆動させるものとされてもよい。例えば、第1の対の駆動エレメントA1,A2が第2の器具インターフェースエレメント1906に接続された場合には、第2の駆動アセンブリインターフェースエレメント2101が第1のジョイント506を駆動することになる。第2の対の駆動エレメントB1,B2が第1の器具インターフェースエレメント1905に接続された場合には、第1の駆動アセンブリインターフェースエレメント2102が第2のジョイント507を駆動することになる。この例では、第3の対の駆動エレメントC1,C2が第3の器具インターフェースエレメント1907に接続されて、第3の駆動アセンブリインターフェースエレメント2103が第3のジョイント513を駆動することになる。この例では、第1の駆動アセンブリインターフェースエレメント2102が、最大距離s1にわたって直線状変位可能である。第2の駆動アセンブリインターフェースエレメント2101が、最大距離s2にわたって直線状変位可能である。第3の駆動アセンブリインターフェースエレメント2103が、最大距離s3にわたって直線状変位可能である。好適には、s2<s1かつs2<s3である。好適には、s1=s3である。
それぞれの器具インターフェースエレメントは、前記駆動アセンブリインターフェースエレメントの対応するソケット内に収容可能であるボディを有している。これらボディの形状とソケットの形状とは、前記駆動アセンブリインターフェースエレメントが変位されたときにこの変位が滑りを生じることなく前記器具インターフェースエレメントに伝えられるように互いに対応している。つまり、前記ボディは前記ソケットへと、変位方向における少なくとも1つの直線に沿って止まり嵌めする。好適には、前記器具インターフェー
スエレメントは、当該器具インターフェースエレメントに対応する駆動アセンブリインターフェースエレメントと同一の変位範囲にわたって変位可能である。
図22aには、前記器具インターフェースエレメントの前記ボディの、前記駆動アセンブリインターフェースエレメントの前記ソケット内に取り付けられる部分の例的な一配置構成が示されている。この場合のボディは、変位方向xにおける当該ボディの長さだけ離間している下部側壁2201,2202を有している。これらの下部側壁は、前記ボディの変位方向xと直交している。上部側壁2203,2204は、前記下部側壁から一点2205に至るまで先細りとなる。好適には、当該上部側壁が一点に至るまで対称的に先細りとなる。前記器具インターフェースを前記駆動アセンブリインターフェースへと係合させるときには、まず点2205が前記駆動アセンブリインターフェースエレメント内へと挿入されて、次に上部側壁2203,2204の残りの部分が、最後に下部側壁2201,2202が挿入される。好ましくは、前記上部側壁同士が合わさる角度αは、80°以下である。αを80°以下に選択することにより、前記ボディと前記ソケットとが変位方向xに沿って完全に位置合わせされていなくても、前記点が前記ソケット内にあれば、方向Fに力が加わったときに前記ボディが前記ソケット内に滑り入る。方向Fは、変位方向xと直交している。すなわち、方向Fは、シャフト504の長手方向軸心と直交し且つ前記駆動アセンブリの長手方向軸心と直交している。
図22bには、前記器具インターフェースの前記ボディの、前記駆動アセンブリインターフェースエレメントの前記駆動アセンブリの前記ソケット内に取り付けられる部分の例的な他の配置構成が示されている。この場合のボディは、2つの前記上部側壁が合わさる点に配置されたローラ2206を具備している点を除き、図22aに関して説明したボディと同じである。ローラ2206は、変位方向xと直交する軸心回りに回転するように構成されている。前記上部側壁同士が合わさる角度βは、80°超とされてもよい。これは、方向Fに力が加わったときに、前記ボディとソケットとが変位方向xに沿って完全に位置合わせされていなくても、ローラ2206が当該ソケット内への当該ボディの係合を支援するからである。
図22cには、前記器具インターフェースの前記ボディの、前記駆動アセンブリインターフェースエレメントの前記駆動アセンブリの前記ソケット内に取り付けられる部分の例的なさらなる他の配置構成が示されている。この場合のボディは、それぞれの上部側壁上に配置されたローラ2207,2208を具備している点を除き、図22aに関して説明したボディと同じである。ローラ2207,2208は、変位方向xと直交する軸心回りに回転するように構成されている。前記上部側壁同士が合わさる角度γは、80°超とされてもよい。これは、方向Fに力が加わったときに、前記ボディとソケットとが変位方向xに沿って完全に位置合わせされていなくても、ローラ2207,2208が当該ソケット内への当該ボディの係合を支援するからである。
図23には、駆動アセンブリインターフェースエレメントのソケットの例的な一配置構成が示されている。前記ボディは、変位方向xにおける当該ボディの長さだけ離間している側壁2301,2302を有している。これらの側壁は、前記ボディの変位方向xと直交している。当該側壁はそれぞれ、ローラ2303,2304で終端している。ローラ2303,2304は、変位方向xと直交する軸心回りに回転するように構成されている。ローラ2303,2304は、前記器具インターフェースが前記駆動アセンブリインターフェースに適用されたときに、前記ボディとソケットとが変位方向xに沿って完全に位置合わせされていなくても、当該ソケット内への当該ボディの係合を支援する。
一例において、変位方向xにおける前記ボディの長さAは、当該ボディが変位方向xにおける変位範囲にわたって移動することのできる最大距離よりも大きい。好適には、変位
方向xにおける前記ボディの長さAは、前記駆動アセンブリインターフェースエレメントの前記ソケットが変位方向における当該ソケットの変位範囲にわたって移動することのできる最大距離よりも大きい。これにより、前記器具インターフェースが前記駆動アセンブリインターフェースとの係合状態に移行させられるときに、前記ボディの変位位置及び前記ソケットの変位位置がどこにあっても、当該ボディが当該ソケット内に係合することになる。よって、前記器具インターフェースと前記駆動アセンブリインターフェースとを合体させるのに、前記器具インターフェースエレメントと前記駆動アセンブリインターフェースエレメントとを予め位置揃えする必要がなくなる。好適には、前記ボディが当該ボディの変位範囲にわたって移動することのできる最大距離は、当該ボディの長さの半分A/2である。Aは、前記ボディの長さである。好適には、前記ソケットが当該ソケットの変位範囲にわたって移動することのできる最大距離は、前記ボディの長さの半分A/2である。
一例において、変位方向xにおける前記ソケットの長さBは、前記ボディが変位方向xにおける変位範囲にわたって移動することのできる最大距離よりも大きい。好適には、変位方向xにおける前記ソケットの長さBは、前記駆動アセンブリインターフェースエレメントの当該ソケットが変位方向における当該ソケットの変位範囲にわたって移動することのできる最大距離よりも大きい。これにより、前記器具インターフェースが前記駆動アセンブリインターフェースとの係合状態に移行させられるときに、前記ボディの変位位置及び前記ソケットの変位位置がどこにあっても、当該ボディが当該ソケット内に係合することになる。よって、前記器具インターフェースと前記駆動アセンブリインターフェースとを合体させるのに、前記器具インターフェースエレメントと前記駆動アセンブリインターフェースエレメントとを予め位置揃えする必要がなくなる。好適には、前記ボディが当該ボディの変位範囲にわたって移動することのできる最大距離は、前記ソケットの長さの半分B/2である。Bは、前記ソケットの長さである。好適には、前記ソケットが当該ソケットの変位範囲にわたって移動することのできる最大距離は、当該ソケットの長さの半分B/2である。
好適には、前記変位方向における前記ボディの長さAは、前記変位方向における前記ソケットの長さBに等しい。
前記器具インターフェースは、当該器具インターフェースと前記駆動アセンブリインターフェースとが係合状態に移行させられるときに当該駆動アセンブリインターフェース内への当該器具インターフェースの位置揃え及び係合を支援するガイドバーを具備しているものであり得る。当該ガイドバーは、前記器具インターフェースの、当該器具インターフェースと前記駆動アセンブリインターフェースとが係合状態に移行させられるときに当該駆動アセンブリインターフェースに対向する外表面に配置されている。当該ガイドバーは、前記器具インターフェースエレメントよりも先に前記駆動アセンブリインターフェース内に収容される。好適には、当該ガイドバーは、前記器具インターフェースの、当該器具インターフェースと前記駆動アセンブリインターフェースとが互いとの接触状態に移行させられるときに当該駆動アセンブリインターフェース内に収容される最初の部分である。当該ガイドバーは、前記駆動アセンブリインターフェース内に収容されると、前記器具インターフェースと当該駆動アセンブリインターフェースとが係合することのできる相対的な向きを、当該器具インターフェースの長手方向姿勢と当該駆動アセンブリインターフェースの長手方向姿勢とを揃えるように拘束する。好適には、当該ガイドバーは、前記器具シャフトの長手方向軸心511が前記ロボットアームの前記末端リンクの長手方向軸心2104と揃っている場合にのみ、前記器具インターフェースが前記駆動アセンブリインターフェース内へと完全に係合することを可能にする。
好適には、前記ガイドバーは、細長く、真直で、かつ、前記器具シャフトの長手方向軸
心511と平行である。前記ガイドバーは、前記器具インターフェースの全体にわたって延設されていてもよい。例えば、前記ガイドバーは、前記器具インターフェースの器具シャフト504に突き合わされる端部から当該器具インターフェースの反対側の端部にかけて長手方向xに延設されていてもよい。変形例として、前記ガイドバーは、器具インターフェースエレメント1905,1906,1907の最小変位位置1931と最大変位位置1932とにより境界決めされる長手方向範囲のみにわたって長手方向xに延設されたものであってもよい。前記駆動アセンブリインターフェース及び前記器具インターフェースが、当該駆動アセンブリインターフェース及び当該器具インターフェースの初期位置である所定の位置合わせ位置をいずれも取ってから互いとの係合状態に移行されるように構成されている場合には、前記ガイドバーが、それら所定の位置合わせ位置での前記器具インターフェースエレメントの変位域により境界決めされる長手方向範囲のみにわたって長手方向xに延設されたものとされ得る。前記所定の位置合わせ位置での全ての前記器具インターフェースエレメントが、前記器具シャフトの長手方向軸心511と直交する共通の平面上で整合している場合には、前記ガイドバーが、それら器具インターフェースエレメント自体の範囲のみにわたって長手方向xに延設されたものとされ得る。好適には、前記ガイドバーは、器具シャフト504の直径よりも幅狭である。前記駆動アセンブリは前記ガイドバーを、当該駆動アセンブリの長手方向軸心2104と平行に収容する。
前記ガイドバーは、図19aに示すガイドバー1960のように一つの部位で構成されるものであってもよい。図示のこのガイドバーは、前記器具インターフェースの全長にわたって延設されている。このガイドバーは、駆動エレメントA1,A2,B1,C1を部分的に又は完全に覆い囲っている。このようにして、これらの駆動エレメントは、前記器具インターフェースが前記駆動アセンブリインターフェースとの係合状態へと移行させられるときに当該器具インターフェースの外部に曝されない。ガイドバー1960は、さらに、前記器具インターフェースの剛性を高める。
変形例として、前記ガイドバーは、複数の部位を有するものとされてもよい。図25は、前記器具インターフェースの、前記駆動アセンブリインターフェースへと最初に係合する表面を示す図である。同図には、2つのガイドバー部位2501,2502が描かれている。このガイドバーは、前記器具インターフェースエレメントの最小変位位置と最大変位位置とにより境界決めされる長手方向範囲の一部にわたって長手方向xに延設されている。
当該ガイドバーと第1の器具インターフェースエレメント1905の両方とが、第1の駆動アセンブリインターフェースエレメント2102内に収容される。この場合の第1の器具インターフェースエレメントは、前記ガイドバーの一方の側に位置するボディ部位と前記ガイドバーの反対の側に位置するボディ部位との2つのボディ部位1905a,1905bを有している。この場合の第1の駆動アセンブリインターフェースエレメントは、前記駆動アセンブリの長手方向軸心2104の両側に位置した2つのソケット部位2101a,2101bを有している。前記器具インターフェースと前記駆動アセンブリインターフェースとが互いとの係合状態へと移行されるときには、そのガイドバーが最初に前記第1の駆動アセンブリインターフェースエレメント内に収容される。このときのガイドバーは、2つのソケット部位2101a,2101b間において前記シャフトの長手方向軸心2104に沿って係合する。当該ガイドバーは、第1の駆動アセンブリインターフェースエレメント2101内に収容されると、前記器具インターフェースが当該駆動アセンブリインターフェース内へと配置される際に当該器具インターフェースがねじれを生じるのを防ぐ。前記ガイドバーは、前記駆動アセンブリインターフェースと前記器具インターフェースとが係合するときに当該駆動アセンブリインターフェースの姿勢と当該器具インターフェースの姿勢とを揃った状態で維持する。前記器具インターフェースがさらに前記駆動アセンブリインターフェース内へと下げられると、第1のボディ部位1905aが前記
ガイドバーの一方の側で第1のソケット部位2101aに係合すると同時に、第2のボディ部位1905bが当該ガイドバーの反対側で第2のソケット部位2101bに係合する。
なお、本明細書で説明する駆動アセンブリインターフェースは、駆動をさらなる器具インターフェースエレメントへと伝達させるさらなる駆動アセンブリインターフェースエレメントを含むように変更されてもよい。本明細書で説明する器具インターフェースは、駆動を前記器具シャフトの遠位端部における前記関節部のさらなるジョイントへと伝達させるさらなる器具インターフェースエレメントを含むように変更されてもよい。前記関節部自体も、さらなるジョイントを含むように変更されてもよい。
なお、前記エンドエフェクタは、エンドエフェクタエレメントを1つしか含まないものとされてもよい。この場合、前記関節部は第3のジョイント513を含まず、前記器具インターフェースは当該第3のジョイントを駆動する器具インターフェースエレメントを含まず、前記駆動アセンブリはこの器具インターフェースエレメントを駆動させる駆動アセンブリインターフェースエレメントを含まない。
前記器具は、手術以外の目的に使用されるものであってもよい。例えば、前記器具は、美容処置に使用されるものであってもよい。
本願の明細書には、本明細書で説明した個々の特徴及び2つ以上のそのような特徴の任意の組合せのそれぞれが、本願の明細書全体と当業者の一般常識とに基づいてこのような特徴又は組合せが実施可能である限り、このような特徴又は特徴の組合せが本明細書で開示した任意の課題を解決するか否かにかかわらず、特許請求の範囲に限定されることなく開示されているものとする。本発明の態様は、そのような個々の特徴又は特徴の組合せのいずれで構成されたものであってもよい。本発明の範疇で様々な変更が施されてもよいことは、前述の説明を参酌することにより当業者にとって明白である。
なお、本発明は、実施の態様として以下の内容を含む。
[態様1]
シャフトと、
エンドエフェクタと、
前記エンドエフェクタを前記シャフトの遠位端部に連結する関節部であって、前記エンドエフェクタが前記シャフトの長手方向軸心に対して所定の範囲の向きに位置することを可能にするジョイントを含む、関節部と、
前記シャフトの近位端部に連結された器具インターフェースと、
前記ジョイントを駆動するように構成された対の駆動エレメントと、
を備える、ロボット手術器具であって、
前記駆動エレメントは、前記器具インターフェースから前記ジョイントへと延びており、各駆動エレメントはスポークを有しており、前記スポークは遠位端部にて、前記関節部に係合する遠位側の可撓部で終端し、かつ近位端部にて、前記器具インターフェースに係合する近位側の可撓部で終端しており、
前記エンドエフェクタが前記シャフトと一直線状になる当該ロボット手術器具の直線状態において、隣接し合う駆動エレメントの前記スポークの遠位端部同士が、前記シャフトの長手方向に沿ってオフセットしている、ロボット手術器具。
[態様2]
態様1に記載のロボット手術器具において、前記対の駆動エレメントの全ての前記シャフト内での延設方向が互いに平行ではない、ロボット手術器具。
[態様3]
態様2に記載のロボット手術器具において、各スポークは、前記シャフトの遠位端部に向かって延びており、かつ、所定の箇所の近傍にて前記遠位側の可撓部で終端しており、当該所定の箇所は、前記エンドエフェクタを回動させるように前記ジョイントを駆動したときに当該スポークが他の駆動エレメントと衝突する場合の終端箇所である、ロボット手術器具。
[態様4]
態様1から3のいずれかに記載のロボット手術器具において、前記関節部が、第1の対の駆動エレメントにより駆動可能な第1のジョイントを有し、当該第1のジョイントは、前記エンドエフェクタが前記シャフトの前記長手方向軸心を横切る第1の軸心回りに回転することを可能にし、前記第1の対の駆動エレメントの第1の駆動エレメントは前記シャフト内において、前記第1の対の駆動エレメントの第2の駆動エレメントと平行に延びている、ロボット手術器具。
[態様5]
態様4に記載のロボット手術器具において、前記関節部が、第2の対の駆動エレメントにより駆動可能な第2のジョイントを有し、当該第2のジョイントは、前記エンドエフェクタのエンドエフェクタエレメントが前記第1の軸心を横切る第2の軸心回りに回転することを可能にし、前記第2の対の駆動エレメントの第1の駆動エレメントは前記シャフト内において、前記第2の対の駆動エレメントの第2の駆動エレメントに対して傾いて延びている、ロボット手術器具。
[態様6]
態様5に記載のロボット手術器具において、前記第2の対の駆動エレメントの各駆動エレメントが前記シャフト内において、前記第1の対の駆動エレメントに対して傾いて延びている、ロボット手術器具。
[態様7]
態様5または6に記載のロボット手術器具において、当該ロボット手術器具が、さらに、周りを前記第2の対の駆動エレメントが移動するように拘束されている遠位側のプーリ機構を備え、
前記器具インターフェースは、周りを前記第2の対の駆動エレメントが移動するように拘束されている近位側のプーリ機構を備え、前記第2の対の駆動エレメントが、前記遠位側のプーリ機構と前記近位側のプーリ機構との間を前記シャフトの前記長手方向軸心に対して傾いて延びている、ロボット手術器具。
[態様8]
態様7に記載のロボット手術器具において、前記遠位側のプーリ機構が一対の遠位側プーリを有し、各遠位側プーリは、前記第1の軸心と平行かつ当該第1の軸心からオフセットしている軸心回りに回転可能である、ロボット手術器具。
[態様9]
態様8に記載のロボット手術器具において、前記一対の遠位側プーリが、第3の軸心回りに回転可能な第1の遠位側プーリおよび第4の軸心回りに回転可能な第2の遠位側プーリを有し、前記第3の軸心が前記第4の軸心からオフセットしている、ロボット手術器具。
[態様10]
態様9に記載のロボット手術器具において、前記第2の対の駆動エレメントの前記第1の駆動エレメントが、前記第1の遠位側プーリの周りを移動するように拘束されており、前記第2の対の駆動エレメントの前記第2の駆動エレメントが、前記第2の遠位側プーリの周りを、反対側で移動するように拘束されている、ロボット手術器具。
[態様11]
態様9または10に記載のロボット手術器具において、前記第1の遠位側プーリおよび前記第2の遠位側プーリが、前記第1のジョイントの両側に配置されている、ロボット手術器具。
[態様12]
態様8から11のいずれかに記載のロボット手術器具において、前記一対の遠位側プーリが、前記シャフト内に配置されている、ロボット手術器具。
[態様13]
態様7から12のいずれかに記載のロボット手術器具において、前記近位側のプーリ機構が、前記第2の対の駆動エレメントの前記第1の駆動エレメントと前記第2の駆動エレメントとを、前記シャフトの近位端部から前記器具インターフェース内へと互いに隣接して進行させる、ロボット手術器具。
[態様14]
態様5から13のいずれかに記載のロボット手術器具において、前記関節部が、第3の対の駆動エレメントにより駆動可能な第3のジョイントを備え、当該第3のジョイントは、前記エンドエフェクタのさらなるエンドエフェクタエレメントが前記第2の軸心回りに回転することを可能にし、前記第3の対の駆動エレメントの第1の駆動エレメントは前記シャフト内において、前記第3の対の駆動エレメントの第2の駆動エレメントに対して傾いて延びている、ロボット手術器具。
[態様15]
態様14に記載のロボット手術器具において、前記第3の駆動エレメントの各駆動エレメントが前記シャフト内において、前記第1の対の駆動エレメントに対して傾いて延びている、ロボット手術器具。
[態様16]
態様7に従属している場合の態様14または15に記載のロボット手術器具において、前記第3の対の駆動エレメントが、前記遠位側のプーリ機構の周りおよび前記近位側のプーリ機構の周りを移動するように拘束されており、前記第3の対の駆動エレメントが、前記遠位側のプーリ機構と前記近位側のプーリ機構との間を前記シャフトの前記長手方向軸心に対して傾いて延びている、ロボット手術器具。
[態様17]
態様10に従属している場合の態様16に記載のロボット手術器具において、前記第3の対の駆動エレメントの前記第1の駆動エレメントが、前記第2の遠位側プーリの周りを移動するように拘束されており、前記第3の対の駆動エレメントの前記第2の駆動エレメントが、前記第1の遠位側プーリの周りを、反対側で移動するように拘束されている、ロボット手術器具。
[態様18]
態様14から17のいずれかに記載のロボット手術器具において、前記近位側のプーリ機構が、前記第3の対の駆動エレメントの前記第1の駆動エレメントと前記第2の駆動エレメントとを、前記シャフトの近位端部から前記器具インターフェース内へと互いに隣接して進行させる、ロボット手術器具。
[態様19]
態様1から18のいずれかに記載のロボット手術器具において、当該ロボット手術器具のいかなる状態においても、隣接し合う駆動エレメントの前記スポークの遠位端部同士が、前記シャフトの長手方向に沿ってオフセットしている、ロボット手術器具。
[態様20]
態様1から19のいずれかに記載のロボット手術器具において、前記エンドエフェクタが前記シャフトと一直線状になる直線状態において、隣接し合う駆動エレメントの前記スポークの近位端部同士が、前記シャフトの長手方向に沿ってオフセットしている、ロボット手術器具。
[態様21]
態様20に記載のロボット手術器具において、各スポークは、前記シャフトの近位端部に向かって延びており、かつ、所定の箇所の近傍にて前記近位側の可撓部で終端しており、当該所定の箇所は、前記エンドエフェクタを回動させるように前記ジョイントを駆動したときに当該スポークが他の駆動エレメントと衝突する場合の終端箇所である、ロボット手術器具。
[態様22]
態様19から21のいずれかに記載のロボット手術器具において、当該ロボット手術器具のいかなる状態においても、隣接し合う駆動エレメントの前記スポークの近位端部同士が、前記シャフトの長手方向に沿ってオフセットしている、ロボット手術器具。
[態様23]
態様1から22のいずれかに記載のロボット手術器具において、前記対の駆動エレメントが、圧縮力及び引張力に抵抗する、ロボット手術器具。
[態様24]
態様1から23のいずれかに記載のロボット手術器具において、各駆動エレメントにつき、前記スポークが前記遠位側の可撓部および前記近位側の可撓部よりも高剛性である、ロボット手術器具。
[態様25]
態様1から24のいずれかに記載のロボット手術器具において、前記スポークが剛体である、ロボット手術器具。
[態様26]
態様1から25のいずれかに記載のロボット手術器具において、前記駆動エレメントの前記遠位側の可撓部及び前記近位側の可撓部がケーブルである、ロボット手術器具。
[態様27]
態様1から26のいずれかに記載のロボット手術器具において、各駆動エレメントにつき、前記スポークの直径が前記遠位側の可撓部の直径よりも大きく且つ当該スポークの直径が前記近位側の可撓部の直径よりも大きい、ロボット手術器具。