JP6800529B2 - 測定方法および測定プログラム - Google Patents
測定方法および測定プログラム Download PDFInfo
- Publication number
- JP6800529B2 JP6800529B2 JP2016246801A JP2016246801A JP6800529B2 JP 6800529 B2 JP6800529 B2 JP 6800529B2 JP 2016246801 A JP2016246801 A JP 2016246801A JP 2016246801 A JP2016246801 A JP 2016246801A JP 6800529 B2 JP6800529 B2 JP 6800529B2
- Authority
- JP
- Japan
- Prior art keywords
- measurement
- region
- scan
- measuring
- measurement result
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000691 measurement method Methods 0.000 title claims description 8
- 238000005259 measurement Methods 0.000 claims description 168
- 230000003287 optical effect Effects 0.000 claims description 89
- 238000000034 method Methods 0.000 claims description 19
- 238000005305 interferometry Methods 0.000 claims description 8
- 230000008569 process Effects 0.000 claims description 4
- 230000001678 irradiating effect Effects 0.000 claims description 3
- 230000002194 synthesizing effect Effects 0.000 claims description 3
- 239000011295 pitch Substances 0.000 claims 6
- 238000003384 imaging method Methods 0.000 description 21
- 230000007246 mechanism Effects 0.000 description 10
- 238000010586 diagram Methods 0.000 description 8
- 230000005540 biological transmission Effects 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 239000002131 composite material Substances 0.000 description 2
- 239000000523 sample Substances 0.000 description 2
- 238000003786 synthesis reaction Methods 0.000 description 2
- 230000008859 change Effects 0.000 description 1
- 229910052736 halogen Inorganic materials 0.000 description 1
- 150000002367 halogens Chemical class 0.000 description 1
- 238000002955 isolation Methods 0.000 description 1
- 108700019579 mouse Ifi16 Proteins 0.000 description 1
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 229920006395 saturated elastomer Polymers 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000003746 surface roughness Effects 0.000 description 1
Images






Description
図1は、本実施形態に係る測定装置、より具体的には画像測定装置の全体構成を示す図である。
図1に示すように、本実施形態に係る画像測定装置1は、対象物Wの形状を測定する装置本体10と、装置本体10を制御するとともに、必要なデータ処理を実行するコンピュータシステム20と、を備える。なお、画像測定装置1は、これらのほかに、測定結果等をプリントアウトするプリンタ等を適宜備えていてもよい。本実施形態に係る画像測定装置1は、例えばシリンダの内壁のような、湾曲形状を有する対象物Wの測定に適している。
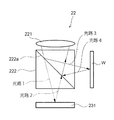
図2に示すように、光干渉光学ヘッド152は、光出射部200と、光干渉光学ヘッド部21と、対物レンズ部22と、参照ミラー部23と、結像レンズ24と、撮像部25と、駆動機構部26とを備える。
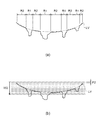
図4(a)は、湾曲形状を有する対象物Wの例を示す模式斜視図、図4(b)は、測定領域を例示する模式図、図4(c)は、3次元データと断面の例を示す模式図である。
本実施形態では、図4(a)に示すシリンダ内壁のような湾曲形状を有する対象物Wの形状測定を行う。光干渉光学ヘッド152は、内壁面Sの所定の領域を測定領域Rとして、内壁面Sに対して垂直な方向の距離を測定する。図4(b)には測定領域Rの1つが模式的に表される。
本実施形態に係る測定方法は、例えば上記のような画像測定装置1を用いて、図4(a)に示すような対象物Wについて表面の測定を行う方法である。
測定方法は、次のような工程を有する。
(1)対象物Wの第1領域の測定に適した測定条件を設定する工程
(2)対象物Wの表面について第1スキャン範囲および第1スキャンピッチで測定を行い、第1測定結果を得る工程
(3)対象物Wの第2領域を算出する工程
(4)第2領域の測定に適した測定条件を設定する工程
(5)第2スキャン範囲および第2スキャンピッチで測定を行い、第2測定結果を得る工程
(6)データを合成する工程
本実施形態に係る測定プログラムは、コンピュータを上記(1)〜(6)の工程に対応した手段として機能させる。図6に示すステップS101〜S106の処理は、上記(1)〜(6)の工程に対応している。
次に、ステップS105に示すように、第2測定結果の取得を行う。すなわち、先に設定した第2領域R2の測定に適した条件によって、対象物Wの表面について第2スキャン範囲および第2スキャンピッチでの測定を行う。このスキャンを「セカンドスキャン」と言う。
3…除振台
10…装置本体
11…架台
12…ステージ
13a…支持部
14…X軸ガイド
15…撮像ユニット
20…コンピュータシステム
21…光干渉光学ヘッド部
22…対物レンズ部
23…参照ミラー部
24…結像レンズ
25…撮像部
26…駆動機構部
151…画像光学ヘッド
152…光干渉光学ヘッド
200…光出射部
201…コンピュータ本体
202…キーボード
203…ジョイスティック
204…マウス
205…ディスプレイ
211…ビームスプリッタ
212…コリメータレンズ
221…対物レンズ
222…ビームスプリッタ
222a…反射面
231…参照ミラー
311…CPU
312…インタフェース
313…出力部
314…入力部
315…主記憶部
316…副記憶部
LV…表面基準位置
MM…記録媒体
R…測定領域
R1…第1領域
R2…第2領域
S…内壁面
W…対象物
Claims (8)
- 測定ヘッドから対象物の表面に光を照射して反射光に基づき形状を測定する方法であって、
前記対象物の第1領域の測定に適した測定条件に設定し、前記表面について深さ方向についての第1スキャン範囲および深さ方向についての第1スキャンピッチで測定を行い、第1測定結果を得る工程と、
前記第1測定結果から前記表面のうちの第2領域を求める工程と、
前記第2領域の測定に適した測定条件に設定し、前記表面について前記第1スキャン範囲よりも狭い深さ方向についての第2スキャン範囲および前記第1スキャンピッチよりも細かい深さ方向についての第2スキャンピッチで測定を行い、第2測定結果を得る工程と、
を備えたことを特徴とする測定方法。 - 前記第2領域を求める工程は、前記第1測定結果から前記第2領域のみの測定データに基づく表面基準位置を想定することを含み、
前記第2測定結果を得る工程は、想定された前記表面基準位置を含む前記第2スキャン範囲を設定することを含む、請求項1記載の測定方法。 - 前記第1領域は、前記表面に対して凹んだ凹部を有する、請求項1または2に記載の測定方法。
- 前記第2領域を求める工程は、前記第1測定結果から前記第2領域のみの測定データに基づく表面基準位置を想定することを含み、
前記第2測定結果を得る工程は、想定された前記表面基準位置を含み、前記表面基準位置の最も低い位置よりも凹む前記凹部の少なくとも底を含まない前記第2スキャン範囲を設定することを含む、請求項3記載の測定方法。 - 前記第2スキャン範囲は前記第1スキャン範囲に含まれ、
前記第1測定結果から得た前記第1領域のデータと、前記第2測定結果から得た前記第2領域のデータとを合成する工程をさらに備えた、請求項1〜4のいずれか1つに記載の測定方法。 - 前記測定ヘッドは、光干渉法によって前記第1測定結果および前記第2測定結果を得る、請求項1〜5のいずれか1つに記載の測定方法。
- 前記第2領域は、前記表面のうち前記第1領域以外の領域である、請求項1〜6のいずれか1つに記載の測定方法。
- 測定ヘッドから対象物の表面に光を照射して反射光に基づき形状を測定する測定プログラムであって、
コンピュータを、
前記対象物の第1領域の測定に適した測定条件に設定し、前記表面について深さ方向についての第1スキャン範囲および深さ方向についての第1スキャンピッチで測定を行い、第1測定結果を得る手段、
前記第1測定結果から前記表面のうちの第2領域を求める手段、
前記第2領域の測定に適した測定条件に設定し、前記表面について前記第1スキャン範囲よりも狭い深さ方向についての第2スキャン範囲および前記第1スキャンピッチよりも細かい深さ方向についての第2スキャンピッチで測定を行い、第2測定結果を得る手段、
として機能させる測定プログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710085875.XA CN107121084B (zh) | 2016-02-25 | 2017-02-17 | 测量方法和测量程序 |
| US15/439,019 US10627221B2 (en) | 2016-02-25 | 2017-02-22 | Measurement method and measurement program |
| DE102017001758.1A DE102017001758A1 (de) | 2016-02-25 | 2017-02-23 | Messverfahren und messprogramm |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016034825 | 2016-02-25 | ||
| JP2016034825 | 2016-02-25 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017151085A JP2017151085A (ja) | 2017-08-31 |
| JP6800529B2 true JP6800529B2 (ja) | 2020-12-16 |
Family
ID=59739605
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016246801A Active JP6800529B2 (ja) | 2016-02-25 | 2016-12-20 | 測定方法および測定プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6800529B2 (ja) |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5471303A (en) * | 1994-04-29 | 1995-11-28 | Wyko Corporation | Combination of white-light scanning and phase-shifting interferometry for surface profile measurements |
| JP4290413B2 (ja) * | 2002-11-18 | 2009-07-08 | 株式会社キーエンス | 測定反復モードを有する共焦点顕微鏡システム |
| JP2004317190A (ja) * | 2003-04-14 | 2004-11-11 | Neomax Co Ltd | 高速凹凸判定可能な表面検査方法及び表面検査システム |
| EP2594896B1 (en) * | 2010-07-15 | 2016-02-10 | Canon Kabushiki Kaisha | Method and apparatus for measuring shape of surface to be inspected, and method for manufacturing optical element |
| JP2014174047A (ja) * | 2013-03-11 | 2014-09-22 | Canon Inc | 計測装置、計測方法、および物品の製造方法 |
| JP5696178B2 (ja) * | 2013-05-29 | 2015-04-08 | 株式会社トプコン | 光断層画像化装置及びその作動方法 |
-
2016
- 2016-12-20 JP JP2016246801A patent/JP6800529B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017151085A (ja) | 2017-08-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107121084B (zh) | 测量方法和测量程序 | |
| JP6758765B2 (ja) | 測定方法および測定プログラム | |
| JP6412710B2 (ja) | 光干渉測定装置 | |
| Bowe et al. | White light interferometric surface profiler | |
| JP6461609B2 (ja) | 干渉対物レンズ、および光干渉測定装置 | |
| JP7317523B2 (ja) | 光干渉測定装置 | |
| JP7093915B2 (ja) | 表面形状測定方法 | |
| CN107525463A (zh) | 光干涉测定装置和光干涉测定方法 | |
| JP2008292296A (ja) | 透明膜の膜厚測定方法およびその装置 | |
| JP4188515B2 (ja) | 光学式形状測定装置 | |
| US20100277746A1 (en) | Method and system for lateral scanning interferometry | |
| US9562761B2 (en) | Position measuring device | |
| US20070024867A1 (en) | Statistical method of generating a synthetic hologram from measured data | |
| KR101116295B1 (ko) | 입체 형상 측정장치 | |
| JP6293528B2 (ja) | 干渉計における参照ミラー表面形状の校正方法 | |
| CN107121058B (zh) | 测量方法 | |
| JP6273109B2 (ja) | 光干渉測定装置 | |
| KR101050071B1 (ko) | 측정 대상물을 측정하기 위한 거울 장치를 포함하는 간섭측정 장치 | |
| JP6800529B2 (ja) | 測定方法および測定プログラム | |
| JP2010164377A (ja) | 表面形状測定システム及び表面形状測定方法 | |
| JP7001947B2 (ja) | 表面形状測定方法 | |
| JP5342178B2 (ja) | 形状測定装置およびその形状測定方法 | |
| JP6820516B2 (ja) | 表面形状測定方法 | |
| JP4177188B2 (ja) | 動的形状及び動的位置の同時測定方法、装置、光学素子 | |
| JP4298105B2 (ja) | 干渉縞測定解析方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20191111 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200819 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200901 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201026 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201124 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201124 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6800529 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |