JP6797145B2 - 水中探査を行うシステム及び遠隔制御装置 - Google Patents
水中探査を行うシステム及び遠隔制御装置 Download PDFInfo
- Publication number
- JP6797145B2 JP6797145B2 JP2018056044A JP2018056044A JP6797145B2 JP 6797145 B2 JP6797145 B2 JP 6797145B2 JP 2018056044 A JP2018056044 A JP 2018056044A JP 2018056044 A JP2018056044 A JP 2018056044A JP 6797145 B2 JP6797145 B2 JP 6797145B2
- Authority
- JP
- Japan
- Prior art keywords
- underwater
- information
- buoy
- exploration
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000004891 communication Methods 0.000 claims description 68
- 238000000034 method Methods 0.000 claims description 30
- 238000010248 power generation Methods 0.000 claims description 21
- 230000010365 information processing Effects 0.000 claims description 20
- 238000003384 imaging method Methods 0.000 claims description 19
- 241000251468 Actinopterygii Species 0.000 claims description 16
- 238000010295 mobile communication Methods 0.000 claims description 12
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims description 12
- 230000002093 peripheral effect Effects 0.000 claims description 8
- 240000004050 Pentaglottis sempervirens Species 0.000 claims description 6
- 235000004522 Pentaglottis sempervirens Nutrition 0.000 claims description 6
- 238000012876 topography Methods 0.000 claims description 4
- CCEKAJIANROZEO-UHFFFAOYSA-N sulfluramid Chemical group CCNS(=O)(=O)C(F)(F)C(F)(F)C(F)(F)C(F)(F)C(F)(F)C(F)(F)C(F)(F)C(F)(F)F CCEKAJIANROZEO-UHFFFAOYSA-N 0.000 claims description 2
- 230000009189 diving Effects 0.000 description 30
- 230000006870 function Effects 0.000 description 17
- 238000013473 artificial intelligence Methods 0.000 description 14
- 238000010586 diagram Methods 0.000 description 14
- 238000012545 processing Methods 0.000 description 12
- 230000005540 biological transmission Effects 0.000 description 9
- 230000003287 optical effect Effects 0.000 description 9
- 238000007667 floating Methods 0.000 description 7
- 238000005516 engineering process Methods 0.000 description 6
- 238000007726 management method Methods 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- 239000007789 gas Substances 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 238000003491 array Methods 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000013500 data storage Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 239000001307 helium Substances 0.000 description 1
- 229910052734 helium Inorganic materials 0.000 description 1
- SWQJXJOGLNCZEY-UHFFFAOYSA-N helium atom Chemical compound [He] SWQJXJOGLNCZEY-UHFFFAOYSA-N 0.000 description 1
- 238000005339 levitation Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 239000005437 stratosphere Substances 0.000 description 1
- 239000003643 water by type Substances 0.000 description 1
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B35/00—Vessels or similar floating structures specially adapted for specific purposes and not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B22/00—Buoys
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63C—LAUNCHING, HAULING-OUT, OR DRY-DOCKING OF VESSELS; LIFE-SAVING IN WATER; EQUIPMENT FOR DWELLING OR WORKING UNDER WATER; MEANS FOR SALVAGING OR SEARCHING FOR UNDERWATER OBJECTS
- B63C11/00—Equipment for dwelling or working underwater; Means for searching for underwater objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63C—LAUNCHING, HAULING-OUT, OR DRY-DOCKING OF VESSELS; LIFE-SAVING IN WATER; EQUIPMENT FOR DWELLING OR WORKING UNDER WATER; MEANS FOR SALVAGING OR SEARCHING FOR UNDERWATER OBJECTS
- B63C11/00—Equipment for dwelling or working underwater; Means for searching for underwater objects
- B63C11/48—Means for searching for underwater objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63C—LAUNCHING, HAULING-OUT, OR DRY-DOCKING OF VESSELS; LIFE-SAVING IN WATER; EQUIPMENT FOR DWELLING OR WORKING UNDER WATER; MEANS FOR SALVAGING OR SEARCHING FOR UNDERWATER OBJECTS
- B63C9/00—Life-saving in water
- B63C9/01—Air-sea rescue devices, i.e. equipment carried by, and capable of being dropped from, an aircraft
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04M—TELEPHONIC COMMUNICATION
- H04M11/00—Telephonic communication systems specially adapted for combination with other electrical systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04Q—SELECTING
- H04Q9/00—Arrangements in telecontrol or telemetry systems for selectively calling a substation from a main station, in which substation desired apparatus is selected for applying a control signal thereto or for obtaining measured values therefrom
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2101/00—UAVs specially adapted for particular uses or applications
- B64U2101/20—UAVs specially adapted for particular uses or applications for use as communications relays, e.g. high-altitude platforms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2101/00—UAVs specially adapted for particular uses or applications
- B64U2101/30—UAVs specially adapted for particular uses or applications for imaging, photography or videography
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2201/00—UAVs characterised by their flight controls
- B64U2201/20—Remote controls
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Ocean & Marine Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Aviation & Aerospace Engineering (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- Acoustics & Sound (AREA)
- Selective Calling Equipment (AREA)
- Radio Relay Systems (AREA)
- Telephonic Communication Services (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
Description
前記システムにおいて、前記無線中継装置及び前記ブイを介して前記水中移動体と通信することにより前記水中移動体の移動を制御する制御装置を更に備えてもよい。前記制御装置は、地上、船舶又は飛行体に設けられた遠隔制御装置であってもよいし、前記無線中継装置に設けられた遠隔制御装置であってもよいし、前記複数のブイのいずれか一つのブイ又はそのブイに連結された水中移動体に設けられてもよい。
また、前記システムにおいて、前記制御装置は、前記複数のブイの互いに隣接するブイ間の最低距離が所定距離以上になるように前記水中移動体の位置を制御してもよいし、前記水中移動体が探査対象を発見したとき、その探査対象の動きに追従するように前記水中移動体の位置を制御してもよいし、前記水中移動体が探査対象を発見したとき、他の周辺の水中移動体を前記探査対象の発見位置に移動させるように前記周辺の水中移動体の位置を制御してもよい。
また、前記システムにおいて、前記上空滞在型の無線中継装置は、水面に位置している前記複数のブイを俯瞰して撮像する撮像部を備え、前記制御装置は、前記水中移動体の位置の制御に、前記複数のブイを俯瞰して撮像した画像を用いてもよい。
また、前記システムにおいて、前記水中移動体の情報取得部は、光、音波、超音波又は電波を用いて水中を撮像する撮像部を含み、前記水中情報は、水中の画像情報を含んでもよい。
また、前記システムにおいて、前記複数の水中移動体で取得された水中情報に基づいて水中探査の情報処理を行う情報処理装置を更に備えてもよい。
また、前記システムにおいて、前記ブイは、そのブイの周辺における周辺情報を取得する情報取得部を有し、前記情報処理装置は、前記複数の水中移動体で取得された前記複数の水中情報と前記複数のブイで取得された周辺情報とに基づいて水中探査の情報処理を行ってもよい。前記ブイの情報取得部は、そのブイの周辺を撮像する撮像部を含み、前記ブイ周辺情報は、ブイの周辺の画像情報を含んでもよい。前記周辺情報は、前記ブイの位置情報及び前記水中移動体の位置情報の少なくとも一方を含んでもよい。
また、前記システムにおいて、前記水中探査の対象は、水中の魚群、生物、生物礁、宝物、遺失物、遭難者、海底火山、遺跡、資源、環境及び地形の少なくとも一つであってもよい。
また、前記システムにおいて、前記水中移動体はバッテリを備え、前記ブイは発電装置を備え、前記水中ケーブルを介して前記水中移動体に電力を供給して前記バッテリを充電してもよい。前記ブイの発電装置は、波のエネルギーを利用して発電する波力発電装置であってもよい。
図1は、本発明の一実施形態に係る広域水中探査システムの全体構成の一例を示す概略構成図である。実施形態の広域水中探査システムは、ICT(情報通信技術)やAI(人工知能)技術を利用して、海などの水中の魚群91、生物、生物礁、遺失物、遭難者、海底火山、遺跡、資源、環境及び地形を探査するシステムであり、例えば、大海原の海中にいる魚群91などを探し出したり養殖魚の監視・観察を行ったりするスマート漁業システムとしても適用可能である。
図4において、ブイ310は、水中ケーブル320の信号線321を介して潜水ロボット330と通信する有線通信部312と、HAPS10と無線通信する無線通信部313と、制御部314とを有する。制御部314は、ブイ310内の各部を制御したり、各部で取得された情報・データを処理したり、外部に送信する情報・データを処理したりする。
図5において、潜水ロボット330は、水中ケーブル320を介してブイ310に連結され、自律制御又は外部からの制御により水中を潜水して任意の方向に移動するための駆動部331と、水中ケーブルを介して通信する有線通信部332と、制御部333と、とを有する。制御部333は、潜水ロボット330内の各部を制御したり、各部で取得された情報・データを処理したり、外部に送信する情報・データを処理したりする。
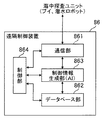
図8において、水中探査ユニット30の潜水ロボット330が画像などの水中情報を取得すると(S101)、その取得情報が、ブイ310、HAPS10及びGW局70を介してサーバ85及び遠隔制御装置86に送信される(S102〜S105,S105’)。ブイ310及びHAPS10で情報が取得された場合(S101’、S101’’)は、その取得情報もサーバ85及び遠隔制御装置86に送信される。
(1)2台のブイのうち東に位置するブイを東の方向にXkm以上離れるまで移動させる。
(2)2台のブイのうち西に位置するブイを西の方向にXkm以上離れるまで移動させる。
(3)2台のブイのうち南に位置するブイを南の方向にXkm以上離れるまで移動させる。
(4)2台のブイのうち北に位置するブイを北の方向にXkm以上離れるまで移動させる。
A.発見ブイ310(6)からの取得情報に基づいて、発見した対象の動きをAI画像認識技術を用いて把握する。
B.対象が動いていなければ、発見ブイ310(6)がその場に留まるように制御する。
C.対象が動いていれば、その対象の動きに沿って発見ブイ310(6)が移動するように制御する。
D.発見ブイ310(6)の近くに位置する近傍ブイ310(1),310(5)を発見ブイ310(6)に近づけるように制御する。
E.近傍ブイ310(1),310(5)が目的の対象を検知すると、その後は、近傍ブイ310(1),310(5)も発見ブイとする。
特に、本実施形態によれば、水中探査ユニット30からの取得情報を、大容量伝送が可能なHAPS10を介して無線通信を介して収集できるため、比較的データサイズが大きな画像データを収集して探査の精度を高めることができる。また、HAPS10を介した無線通信は低遅延のデータ伝送が可能であるため、海洋の広域にわたる探査をリアルタイムに行うことができる。
また、本実施形態によれば、水中探査ユニット30のブイ310を、地上や船舶(母船)の遠隔制御装置86,62で位置制御される潜水ロボット330で曳航できるため、海などの広域にわたる水中探査を低コストで短時間に行うことができる。また、大容量伝送が可能なHAPS10を介して取得した画像データに基づいて水中探査ユニット30を精度よく制御できるとともに、HAPS10を介した無線通信は低遅延のデータ伝送が可能であるため、海洋の広域における水中探査ユニット30のリアルタイム制御が可能になる。
また、本実施形態によれば、水中探査ユニット30のブイ310は、波力発電装置などの発電装置を備え、そのブイ310に接続された潜水ロボット330に電力したり潜水ロボット330のバッテリーを充電できるため、海洋の広域にわたる探査及びそれに用いる水中探査ユニット30の制御を長期間(例えば、24時間、365日)にわたって実行することができる。
11:フィーダリンク通信部
11a:アンテナ
12:サービスリンク通信部
12a:アンテナ
13:周波数変換部
14:制御部
17:電源部
18:撮像部
30:水中探査ユニット
60:船舶
61:サーバ
62:遠隔制御装置
70:GW局
80:移動通信網
85:サーバ
86:遠隔制御装置
90:海
90s:海面
91:魚群
95:地上
110:無線中継局
310:ブイ
311:アンテナ
312:有線通信部
313:無線通信部
314:制御部
315:GPS受信部
316:発電装置
317:撮像部
318:センサ
319:投光装置
320:水中ケーブル
321:信号線
322:電力線
330:潜水ロボット
331:駆動部
332:有線通信部
333:制御部
334:電力供給部
335:バッテリー
336:情報取得部
337:投光装置
851:通信部
852:データベース部
853:データ処理部
854:制御部
861:通信部
862:データベース部
863:制御情報生成部
864:制御部
3361:撮像部
3362:ソナー
3363:センサ
Claims (17)
- 水中探査を行うシステムであって、
水中ケーブルを介して通信する有線通信部と、上空滞在型の無線中継装置と無線通信する無線通信部とを有する複数のブイと、
前記複数のブイのそれぞれに前記水中ケーブルを介して連結され、自律制御又は外部からの制御により水中を潜水して移動するための駆動部と、前記水中ケーブルを介して通信する有線通信部と、水中情報を取得する情報取得部とを有し、前記水中ケーブルを介して前記ブイを曳航するように移動する複数の水中移動体と、
太陽光発電部及びバッテリを含む電源部から供給された電力で飛行し、地上のゲートウェイ局を介して移動通信網のコアネットワークに接続された、前記複数のブイと無線通信可能な上空滞在型の無線中継装置と、
前記ブイを介して前記水中移動体と通信することにより前記水中移動体の位置を制御する制御装置と、を備え、
前記上空滞在型の無線中継装置を複数備え、
前記複数の無線中継装置はそれぞれ、所定高度の空域を飛行し、前記空域の位置から海面に向けて移動通信の3次元セルを形成し、前記3次元セル内に位置する前記ブイ及び他の移動局と無線通信可能であり、
前記複数の無線中継装置は、無線中継装置間の無線通信により、移動通信網に接続された当該複数の無線中継装置による3次元の無線通信ネットワークを形成し、
前記制御装置は、前記3次元の無線通信ネットワークを形成する前記複数の無線中継装置のいずれかと、前記移動通信網のコアネットワークとを介して、前記水中移動体が連結された前記ブイと通信することを特徴とするシステム。 - 請求項1のシステムにおいて、
前記制御装置は、地上、船舶又は飛行体に設けられた遠隔制御装置であることを特徴とするシステム。 - 請求項1のシステムにおいて、
前記制御装置は、前記無線中継装置に設けられた遠隔制御装置であることを特徴とするシステム。 - 請求項1乃至3のいずれかのシステムにおいて、
前記制御装置は、前記複数のブイの互いに隣接するブイ間の最低距離が所定距離以上になるように前記水中移動体の位置を制御することを特徴とするシステム。 - 請求項1乃至4のいずれかのシステムにおいて、
前記制御装置は、前記水中移動体が探査対象を発見したとき、その探査対象の動きに追従するように前記水中移動体の位置を制御することを特徴とするシステム。 - 請求項1乃至4のいずれかのシステムにおいて、
前記制御装置は、前記水中移動体が探査対象を発見したとき、他の周辺の水中移動体を前記探査対象の発見位置に移動させるように前記周辺の水中移動体の位置を制御することを特徴とするシステム。 - 請求項1乃至6のいずれかのシステムにおいて、
前記制御装置は、情報処理装置から受信した水中探査の探査結果と、前記ブイ又は前記水中移動体の位置情報とに基づいて、前記水中移動体の位置を制御する制御情報を生成し、その制御情報を、前記上空滞在型の無線中継装置及び前記ブイを介して前記水中移動体に送信することを特徴とするシステム。 - 請求項1乃至7のいずれかのシステムにおいて、
前記制御装置は、前記複数のブイを分散配置させて海洋の広域にわたって目標の対象を探査する広域探査モードを実行し、その広域探査モードにより前記目標の対象を発見したら、前記広域探査モードから、前記目標の対象を発見した前記水中移動体が連結された前記ブイの近くに周辺の他のブイに連結された水中移動体を集めて前記目標の対象のより詳細に探査する集中探査モードに切り換えて実行することを特徴とするシステム。 - 請求項1乃至8のいずれかのシステムにおいて、
前記上空滞在型の無線中継装置は、水面に位置している前記複数のブイを俯瞰して撮像する撮像部を備え、
前記制御装置は、前記水中移動体の位置の制御に、前記複数のブイを俯瞰して撮像した画像を用いることを特徴とするシステム。 - 請求項1乃至9のいずれかのシステムにおいて、
前記水中移動体の情報取得部は、光、音波、超音波又は電波を用いて水中を撮像する撮像部を含み、
前記水中情報は、水中の画像情報を含むことを特徴とするシステム。 - 請求項1乃至10のいずれかのシステムにおいて、
前記複数の水中移動体で取得された水中情報に基づいて水中探査の情報処理を行う情報処理装置を更に備えることを特徴とするシステム。 - 請求項11のシステムにおいて、
前記ブイは、そのブイの周辺における周辺情報を取得する情報取得部を有し、
前記情報処理装置は、前記複数の水中移動体で取得された前記複数の水中情報と前記複数のブイで取得された周辺情報とに基づいて水中探査の情報処理を行うことを特徴とするシステム。 - 請求項12のシステムにおいて、
前記ブイの情報取得部は、そのブイの周辺を撮像する撮像部を含み、
前記周辺情報は、前記ブイの周辺の画像情報を含むことを特徴とするシステム。 - 請求項12又は13のシステムにおいて、
前記周辺情報は、前記ブイの位置情報及び前記水中移動体の位置情報の少なくとも一方を含むことを特徴とするシステム。 - 請求項1乃至14のいずれかのシステムにおいて、
前記水中探査の対象は、水中の魚群、生物、生物礁、宝物、遺失物、遭難者、海底火山、遺跡、資源、環境及び地形の少なくとも一つであることを特徴とするシステム。 - 請求項1乃至15のいずれかのシステムにおいて、
前記水中移動体はバッテリを備え、
前記ブイは発電装置を備え、前記水中ケーブルを介して前記水中移動体に電力を供給して前記バッテリを充電することを特徴とするシステム。 - 請求項16のシステムにおいて、
前記ブイの発電装置は、波のエネルギーを利用して発電する波力発電装置であることを特徴とするシステム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018056044A JP6797145B2 (ja) | 2018-03-23 | 2018-03-23 | 水中探査を行うシステム及び遠隔制御装置 |
| PCT/JP2019/010676 WO2019181751A1 (ja) | 2018-03-23 | 2019-03-14 | Hapsを介した広域水中探査潜水ロボットの自律分散制御 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018056044A JP6797145B2 (ja) | 2018-03-23 | 2018-03-23 | 水中探査を行うシステム及び遠隔制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019166961A JP2019166961A (ja) | 2019-10-03 |
| JP2019166961A5 JP2019166961A5 (ja) | 2020-03-19 |
| JP6797145B2 true JP6797145B2 (ja) | 2020-12-09 |
Family
ID=67987772
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018056044A Active JP6797145B2 (ja) | 2018-03-23 | 2018-03-23 | 水中探査を行うシステム及び遠隔制御装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6797145B2 (ja) |
| WO (1) | WO2019181751A1 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102419238B1 (ko) * | 2019-11-25 | 2022-07-12 | 경희대학교 산학협력단 | 저궤도 위성 및 무인 비행체에 기반하는 해상 통신 시스템 |
| US11705962B2 (en) | 2019-11-25 | 2023-07-18 | University-Industry Cooperation Group Of Kyung Hee University | Maritime communication system based on low earth orbit satellite and unmanned aerial vehicle |
| JP7328885B2 (ja) * | 2019-12-24 | 2023-08-17 | 川崎重工業株式会社 | 動作センサ選択装置、目標探知システム及び動作センサ選択方法 |
| CN111392007B (zh) * | 2020-04-23 | 2025-02-14 | 上海海洋大学 | 一种用于海洋牧场环境监测的仿生海鳗 |
| JP7301788B2 (ja) * | 2020-05-25 | 2023-07-03 | Kddi株式会社 | 光中継器及び光海底ケーブルシステム |
| JP7586698B2 (ja) * | 2020-12-15 | 2024-11-19 | ソフトバンク株式会社 | 制御装置、プログラム、システム、及び方法 |
| CN113093770B (zh) * | 2021-03-30 | 2022-03-29 | 华南理工大学 | 基于波浪评估的多旋翼无人飞船水面起飞控制方法 |
| KR102351398B1 (ko) * | 2021-06-17 | 2022-01-14 | (주)지오시스템리서치 | 영상 장비를 이용한 해양 생물 탐지 방법 및 시스템 |
| CN113163274B (zh) * | 2021-06-24 | 2021-09-14 | 深之蓝(天津)水下智能科技有限公司 | 一种水下机器人通信系统 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6108539A (en) * | 1992-03-06 | 2000-08-22 | Aircell, Incorporated | Non-terrestrial cellular mobile telecommunication station |
| US5231609A (en) * | 1992-09-28 | 1993-07-27 | The United States Of America As Represented By The Secretary Of The Navy | Multiplatform sonar system and method for underwater surveillance |
| KR100531078B1 (ko) * | 2003-07-09 | 2005-11-24 | 차봉열 | 파력발전을 이용한 표식부표 기구 |
| JP2008110656A (ja) * | 2006-10-30 | 2008-05-15 | Kenwood Corp | 水中撮影ブイ |
| US8200251B2 (en) * | 2010-01-15 | 2012-06-12 | Apple Inc. | Determining a location of a mobile device using a location database |
| US8990002B1 (en) * | 2011-10-14 | 2015-03-24 | The Boeing Company | Method and apparatus for determining the relative position of a target |
| IL228660B (en) * | 2013-10-01 | 2020-08-31 | Elta Systems Ltd | Underwater system and method therefor |
| US9852642B2 (en) * | 2016-03-08 | 2017-12-26 | International Business Machines Corporation | Drone air traffic control and flight plan management |
| JP6819068B2 (ja) * | 2016-03-31 | 2021-01-27 | 日本電気株式会社 | アクティブソーナー制御装置と送信制御方法とプログラム |
| CN107200144A (zh) * | 2017-05-06 | 2017-09-26 | 西安多杰机器人有限公司 | 一种巡航用小型无人直升机 |
-
2018
- 2018-03-23 JP JP2018056044A patent/JP6797145B2/ja active Active
-
2019
- 2019-03-14 WO PCT/JP2019/010676 patent/WO2019181751A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019166961A (ja) | 2019-10-03 |
| WO2019181751A1 (ja) | 2019-09-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6797145B2 (ja) | 水中探査を行うシステム及び遠隔制御装置 | |
| JP6883461B2 (ja) | 無人飛行体を用いた水中調査システム及び水中調査方法 | |
| JP6715281B2 (ja) | 水中探査を行うシステム及び情報処理装置 | |
| US10589829B2 (en) | Gliding robotic fish navigation and propulsion | |
| US10691993B2 (en) | System and method for autonomous tracking and imaging of a target | |
| US8418642B2 (en) | Unmanned submersible vehicles and methods for operating the same in a body of liquid | |
| US9321529B1 (en) | Hybrid mobile buoy for persistent surface and underwater exploration | |
| US9606220B2 (en) | Satellite and acoustic tracking device | |
| US10291071B2 (en) | Wireless power and data transfer for unmanned vehicles | |
| CN108583920A (zh) | 一种无人机用海上着陆平台及无人机着陆的控制方法 | |
| US20220185436A1 (en) | Autonomous navigation type marine buoy and marine information system using the same | |
| WO2015187743A1 (en) | Controllable buoys and networked buoy systems | |
| CN108248859A (zh) | 系留式海空多栖航行器系统 | |
| JP7053774B2 (ja) | 無人飛行体を用いた水中調査システム及び水中調査方法 | |
| Wood et al. | State of technology in autonomous underwater gliders | |
| Huixi et al. | Heterogeneous oceanographic exploration system based on USV and AUV: A survey of developments and challenges | |
| Manley et al. | Unmanned Surface Vessels (USVs) as tow platforms: Wave Glider experience and results | |
| JP2019166959A5 (ja) | 水中探査を行うシステム及び情報処理装置 | |
| US12110086B2 (en) | Methods and systems for surveying using deep-water vessels | |
| CN107135099A (zh) | 水上空间探测装置和系统 | |
| JP6568615B1 (ja) | 自律航行型海洋ブイとこれを用いた海洋情報システム | |
| Gaugue et al. | Development of an aquatic USV with high communication capability for environmental surveillance | |
| Watanabe et al. | Development of a floating LBL system and a lightweight ROV for sky to water system | |
| CN117834646A (zh) | 一种水空两栖无人机集群的跨介质分布式协同定位方法 | |
| Gray et al. | The NaviGator Autonomous Maritime System |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200204 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200204 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20200204 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20200304 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200306 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200430 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200605 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200902 |
|
| C60 | Trial request (containing other claim documents, opposition documents) |
Free format text: JAPANESE INTERMEDIATE CODE: C60 Effective date: 20200902 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20200910 |
|
| C21 | Notice of transfer of a case for reconsideration by examiners before appeal proceedings |
Free format text: JAPANESE INTERMEDIATE CODE: C21 Effective date: 20200911 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201030 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201117 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6797145 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |