JP6777556B2 - X線ct装置 - Google Patents
X線ct装置 Download PDFInfo
- Publication number
- JP6777556B2 JP6777556B2 JP2017008493A JP2017008493A JP6777556B2 JP 6777556 B2 JP6777556 B2 JP 6777556B2 JP 2017008493 A JP2017008493 A JP 2017008493A JP 2017008493 A JP2017008493 A JP 2017008493A JP 6777556 B2 JP6777556 B2 JP 6777556B2
- Authority
- JP
- Japan
- Prior art keywords
- ray
- focus movement
- movement correction
- detection element
- ray detection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images










Landscapes
- Apparatus For Radiation Diagnosis (AREA)
Description

Claims (11)
- X線管と、
前記X線管に対向配置され、前記X線管からのX線の強度を出力するX線検出素子を複数有するX線検出器と、
前記X線管及び前記X線検出器を搭載し、被検体の周囲を回転する回転盤と、
前記X線管の焦点移動量を算出し、算出した焦点移動量から焦点移動補正量を算出する焦点移動補正量算出装置と、
前記焦点移動補正量に基づき焦点移動補正を行う焦点移動補正装置とを有し、
前記焦点移動補正量算出装置は、前記X線検出器のX線検出素子の各々について被検体による遮蔽の有無を判定し、遮蔽されていないと判定されたX線検出素子から所定の条件を満たすX線検出素子を選択し、選択されたX線検出素子の出力値から焦点移動量を算出するX線CT装置。 - 請求項1において、
前記焦点移動補正量算出装置は、前記X線検出器のX線検出素子の各々について故障の有無を判定し、遮蔽されていない、または故障していないと判定されたX線検出素子から前記所定の条件を満たすX線検出素子を選択し、選択されたX線検出素子の出力値から焦点移動量を算出するX線CT装置。 - 請求項2において、
前記回転盤が回転し、前記X線管からのX線が異なる角度で被検体に複数回照射されることにより、前記X線検出器から複数個の投影データが出力され、
前記焦点移動補正量算出装置は、前記複数個の投影データの各々について焦点移動量を算出し、算出された複数の焦点移動量の代表値を前記焦点移動補正量として算出するX線CT装置。 - 請求項3において、
前記焦点移動補正量算出装置は、前記所定の条件として、
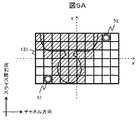
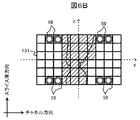
前記X線検出器の中心を通りチャネル方向に伸びる第1の軸に対して線対称位置にあるX線検出素子の対、または前記X線検出器の中心に対して点対称位置にあるX線検出素子の対であって、
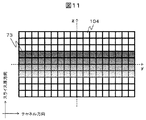
前記X線検出器の中心を通りスライス厚方向に伸びる第2の軸の方向に対して最も外側、かつ前記第1の軸の方向に対して最も内側に位置するX線検出素子の対を含むX線CT装置。 - 請求項4において、
前記焦点移動補正量算出装置は、前記所定の条件を満たす複数のX線検出素子の対を選択し、
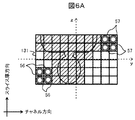
前記複数のX線検出素子の対は、それぞれ前記第1の軸よりも被検体を載せる寝台側に位置するフロント側X線検出素子と、前記フロント側X線検出素子と前記第1の軸に対して線対称位置または前記X線検出器の中心に対して点対称位置にあるリア側X線検出素子との対であり、
前記複数のX線検出素子の対における複数の前記フロント側X線検出素子の出力値の代表値、及び前記複数のX線検出素子の対における複数の前記リア側X線検出素子の出力値の代表値から焦点移動量を算出するX線CT装置。
- 請求項3において、
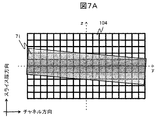
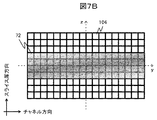
前記焦点移動補正量算出装置は、選択されたX線検出素子の出力値に対して、前記X線検出器に照射されるX線強度のチャネル方向への不均一に起因するチャネル方向のX線検出素子の出力特性の補正を行った補正出力値を用いて焦点移動量を算出するX線CT装置。 - 請求項3において、
前記焦点移動補正量算出装置は、選択されたX線検出素子の出力値に対して、前記X線検出器に照射されるX線強度のスライス厚方向への不均一に起因するスライス厚方向のX線検出素子の出力特性の補正を行った補正出力値を用いて焦点移動量を算出するX線CT装置。 - 請求項3において、
前記焦点移動補正量算出装置は、選択されたX線検出素子の出力値に対して、前記回転盤の回転に起因する前記回転盤の回転角度に対するX線検出素子の出力変動特性の補正を行った補正出力値を用いて焦点移動量を算出するX線CT装置。
- 請求項1〜8のいずれか一項において、
前記焦点移動補正装置は前記焦点移動補正量に基づき前記X線管の位置を移動させるX線CT装置。 - 請求項1〜8のいずれか一項において、
前記焦点移動補正装置は前記焦点移動補正量に基づき前記X線検出器の位置を移動させるX線CT装置。 - 請求項1〜8のいずれか一項において、
前記X線管から発生するX線の照射領域を成形するコリメータを有し、
前記焦点移動補正装置は前記焦点移動補正量に基づき前記コリメータの位置を移動させるX線CT装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017008493A JP6777556B2 (ja) | 2017-01-20 | 2017-01-20 | X線ct装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017008493A JP6777556B2 (ja) | 2017-01-20 | 2017-01-20 | X線ct装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018114211A JP2018114211A (ja) | 2018-07-26 |
| JP2018114211A5 JP2018114211A5 (ja) | 2019-08-15 |
| JP6777556B2 true JP6777556B2 (ja) | 2020-10-28 |
Family
ID=62983571
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017008493A Active JP6777556B2 (ja) | 2017-01-20 | 2017-01-20 | X線ct装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6777556B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2972236T3 (es) * | 2021-11-03 | 2024-06-11 | Bruker Belgium S A | Un método para obtener una imagen de TC de un objeto con compensación del efecto talón en el espacio de la imagen |
| CN117137504B (zh) * | 2023-10-30 | 2024-03-15 | 赛诺威盛科技(北京)股份有限公司 | 用于医疗影像设备的探测器模块的校正工装及校正方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4314645B2 (ja) * | 1998-07-17 | 2009-08-19 | 株式会社島津製作所 | X線ct装置 |
| JP4298011B2 (ja) * | 1998-08-06 | 2009-07-15 | 株式会社東芝 | X線ファンビーム位置移動検出システムおよびそれを適用したctスキャナ装置 |
| US6310938B1 (en) * | 1999-08-27 | 2001-10-30 | General Electric Company | Methods and apparatus for calibrating CT x-ray beam tracking loop |
| JP2003210454A (ja) * | 2002-01-23 | 2003-07-29 | Hitachi Medical Corp | X線ct装置 |
| JP5242350B2 (ja) * | 2008-11-13 | 2013-07-24 | 株式会社日立メディコ | X線ct装置 |
| CN102770077B (zh) * | 2010-02-26 | 2015-07-15 | 株式会社日立医疗器械 | X射线摄像装置 |
| US20160199019A1 (en) * | 2015-01-13 | 2016-07-14 | Arineta Ltd. | Method and apparatus for focal spot position tracking |
-
2017
- 2017-01-20 JP JP2017008493A patent/JP6777556B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018114211A (ja) | 2018-07-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7073380B2 (ja) | 自己較正ct検出器、自己較正を行うためのシステムおよび方法 | |
| US8983165B2 (en) | System and method for measuring X-ray beam profile using an area detector | |
| JP6456699B2 (ja) | X線フォトンカウンティングコンピュータ断層撮影装置、スペクトル補正方法およびスペクトル補正プログラム | |
| US9406121B2 (en) | X-ray CT apparatus and image reconstruction method | |
| US7372936B2 (en) | Radiation computed tomography apparatus and tomographic image data generating method | |
| US8290116B2 (en) | Imaging apparatus including correction unit for scattered radiation | |
| JP6603233B2 (ja) | データ処理装置、x線ct装置、及びリファレンス補正方法 | |
| CN108697397A (zh) | 辐射断层成像系统及其控制程序 | |
| EP3835830B1 (en) | Systems and methods for estimating a focal spot motion and calculating a corresponding correction | |
| JP5579505B2 (ja) | X線ct装置 | |
| WO2018235393A1 (ja) | X線ct装置及びx線照射条件設定方法 | |
| CN109893149B (zh) | X射线透视摄影装置 | |
| JP5469952B2 (ja) | X線ct装置 | |
| JP6777556B2 (ja) | X線ct装置 | |
| JP2023157887A (ja) | 光子計数型ct装置、光子計数型ct方法及びプログラム | |
| JP5995491B2 (ja) | X線ct装置 | |
| EP4111978B1 (en) | Systems and methods for focal spot motion detection in both x- and y-directions and correction | |
| US10070840B2 (en) | X-ray computed tomography apparatus and radiation medical imaging diagnostic apparatus | |
| US20200015769A1 (en) | X-ray computed tomography apparatus and correction method | |
| JP4761804B2 (ja) | 放射線検査装置及び放射線検査方法 | |
| JP4381099B2 (ja) | 放射線断層撮影装置 | |
| US20240078723A1 (en) | Medical image processing apparatus and medical image processing method | |
| US12412322B2 (en) | X-ray diagnostic apparatus causes x-ray detector to read a signal in non-destructive readout and to read a signal in destructive readout and generates first and second projections data, and non-transitory computer-readable storage medium | |
| US20250281144A1 (en) | Pcct apparatus and control method thereof | |
| JP4587672B2 (ja) | 放射線断層撮影装置および放射線断層撮影方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190701 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190701 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200529 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200623 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200817 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200915 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201008 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6777556 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |