JP6773769B2 - 関節鏡下外科装置 - Google Patents
関節鏡下外科装置 Download PDFInfo
- Publication number
- JP6773769B2 JP6773769B2 JP2018511485A JP2018511485A JP6773769B2 JP 6773769 B2 JP6773769 B2 JP 6773769B2 JP 2018511485 A JP2018511485 A JP 2018511485A JP 2018511485 A JP2018511485 A JP 2018511485A JP 6773769 B2 JP6773769 B2 JP 6773769B2
- Authority
- JP
- Japan
- Prior art keywords
- assembly
- snare wire
- bone
- curved
- channel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 210000000988 bone and bone Anatomy 0.000 claims description 131
- 230000015572 biosynthetic process Effects 0.000 claims description 21
- 230000006835 compression Effects 0.000 claims description 7
- 238000007906 compression Methods 0.000 claims description 7
- 238000004804 winding Methods 0.000 claims description 4
- 238000005520 cutting process Methods 0.000 description 34
- 238000010422 painting Methods 0.000 description 20
- 238000005755 formation reaction Methods 0.000 description 15
- 238000000034 method Methods 0.000 description 12
- 239000004033 plastic Substances 0.000 description 11
- 230000005641 tunneling Effects 0.000 description 10
- 210000003811 finger Anatomy 0.000 description 7
- 230000005540 biological transmission Effects 0.000 description 4
- 229910001220 stainless steel Inorganic materials 0.000 description 4
- 239000010935 stainless steel Substances 0.000 description 4
- 210000003813 thumb Anatomy 0.000 description 4
- 229910000831 Steel Inorganic materials 0.000 description 3
- 230000005465 channeling Effects 0.000 description 3
- 239000010959 steel Substances 0.000 description 3
- 0 C(CC1)CC2*1=C2 Chemical compound C(CC1)CC2*1=C2 0.000 description 2
- 238000002347 injection Methods 0.000 description 2
- 239000007924 injection Substances 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- HLXZNVUGXRDIFK-UHFFFAOYSA-N nickel titanium Chemical compound [Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni] HLXZNVUGXRDIFK-UHFFFAOYSA-N 0.000 description 2
- 229910001000 nickel titanium Inorganic materials 0.000 description 2
- 230000000087 stabilizing effect Effects 0.000 description 2
- 238000003860 storage Methods 0.000 description 2
- 238000001356 surgical procedure Methods 0.000 description 2
- 210000001519 tissue Anatomy 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 239000007844 bleaching agent Substances 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- ZZUFCTLCJUWOSV-UHFFFAOYSA-N furosemide Chemical compound C1=C(Cl)C(S(=O)(=O)N)=CC(C(O)=O)=C1NCC1=CC=CO1 ZZUFCTLCJUWOSV-UHFFFAOYSA-N 0.000 description 1
- 210000002758 humerus Anatomy 0.000 description 1
- 230000003116 impacting effect Effects 0.000 description 1
- 238000001746 injection moulding Methods 0.000 description 1
- 238000005304 joining Methods 0.000 description 1
- 238000002372 labelling Methods 0.000 description 1
- 210000003041 ligament Anatomy 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000002991 molded plastic Substances 0.000 description 1
- 230000000399 orthopedic effect Effects 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 210000002435 tendon Anatomy 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images





















































































































































































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/16—Bone cutting, breaking or removal means other than saws, e.g. Osteoclasts; Drills or chisels for bones; Trepans
- A61B17/1642—Bone cutting, breaking or removal means other than saws, e.g. Osteoclasts; Drills or chisels for bones; Trepans for producing a curved bore
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/04—Surgical instruments, devices or methods, e.g. tourniquets for suturing wounds; Holders or packages for needles or suture materials
- A61B17/0469—Suturing instruments for use in minimally invasive surgery, e.g. endoscopic surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/04—Surgical instruments, devices or methods, e.g. tourniquets for suturing wounds; Holders or packages for needles or suture materials
- A61B17/0482—Needle or suture guides
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/04—Surgical instruments, devices or methods, e.g. tourniquets for suturing wounds; Holders or packages for needles or suture materials
- A61B17/06—Needles ; Sutures; Needle-suture combinations; Holders or packages for needles or suture materials
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/04—Surgical instruments, devices or methods, e.g. tourniquets for suturing wounds; Holders or packages for needles or suture materials
- A61B17/06—Needles ; Sutures; Needle-suture combinations; Holders or packages for needles or suture materials
- A61B17/062—Needle manipulators
- A61B17/0625—Needle manipulators the needle being specially adapted to interact with the manipulator, e.g. being ridged to snap fit in a hole of the manipulator
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/16—Bone cutting, breaking or removal means other than saws, e.g. Osteoclasts; Drills or chisels for bones; Trepans
- A61B17/1604—Chisels; Rongeurs; Punches; Stamps
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/16—Bone cutting, breaking or removal means other than saws, e.g. Osteoclasts; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1615—Drill bits, i.e. rotating tools extending from a handpiece to contact the worked material
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/04—Surgical instruments, devices or methods, e.g. tourniquets for suturing wounds; Holders or packages for needles or suture materials
- A61B17/0483—Hand-held instruments for holding sutures
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/04—Surgical instruments, devices or methods, e.g. tourniquets for suturing wounds; Holders or packages for needles or suture materials
- A61B17/06—Needles ; Sutures; Needle-suture combinations; Holders or packages for needles or suture materials
- A61B17/06004—Means for attaching suture to needle
- A61B2017/06028—Means for attaching suture to needle by means of a cylindrical longitudinal blind bore machined at the suture-receiving end of the needle, e.g. opposite to needle tip
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/04—Surgical instruments, devices or methods, e.g. tourniquets for suturing wounds; Holders or packages for needles or suture materials
- A61B17/06—Needles ; Sutures; Needle-suture combinations; Holders or packages for needles or suture materials
- A61B17/06004—Means for attaching suture to needle
- A61B2017/06042—Means for attaching suture to needle located close to needle tip
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/04—Surgical instruments, devices or methods, e.g. tourniquets for suturing wounds; Holders or packages for needles or suture materials
- A61B17/06—Needles ; Sutures; Needle-suture combinations; Holders or packages for needles or suture materials
- A61B17/06066—Needles, e.g. needle tip configurations
- A61B2017/0608—J-shaped
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biomedical Technology (AREA)
- Medical Informatics (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Engineering & Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Dentistry (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Surgical Instruments (AREA)
Description
本出願に関連していると考えられる以下のPCT特許出願および米国仮出願が参照され、その内容が参照により本明細書に組み込まれる:
「Arthroscopic Surgical Device」という名称で、2014年9月9日に公開された、公開PCT特許出願第WO/2014/147619号;
「Arthroscopic Surgical Device」という名称で、2013年7月11日に公開された、公開PCT特許出願第WO/2013/102909号;
「Arthroscopic Surgical Device」という名称で、2013年2月28日に公開された、公開PCT特許出願第WO/2013/027209号;
「Circular Bone Tunneling Device Employing a Stabilizing Element」という名称で、2013年2月28日に公開された、公開PCT特許出願第WO/2013/027210号;
「Circular Bone Tunneling Device」という名称で、2011年7月11日に公開された、公開PCT特許出願第WO/2012/007941号;
「Arthroscopic Surgical Device」という名称で、2013年3月18日に出願された、米国仮特許出願第61/802,958号;
「Arthroscopic Surgical Device」という名称で、2013年10月7日に出願された、米国仮特許出願第61/887,561号;
「Circular Bone Tunneling Device Employing a Stabilizing Element」という名称で、2012年4月23日に出願された、米国仮特許出願第61/636,751号;
「Circular Bone Tunneling Device」という名称で、2011年8月24日に出願された、米国仮特許出願第61/526,717号;
「Arthroscopic Surgical Device」という名称で、2012年10月17日に出願された、米国仮特許出願第61/714,813号;および
「Circular Bone Tunneling Device」という名称で、2012年1月8日に出願された、米国仮特許出願第61/584,267号。
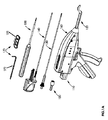
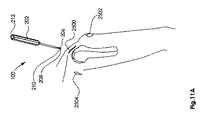
本発明は、一般に、関節鏡下外科装置に関し、より詳細には、関節鏡下骨トンネル形成装置に関する。
Claims (5)
- 第1の真っ直ぐなチャネルを骨内に形成するように構成されたパンチおよび第2の真っ直ぐなチャネルを骨内に形成するように構成されたドリルを備える有用な関節鏡下骨チャネル形成および縫合システムであって、前記第2の真っ直ぐなチャネルは前記第1の真っ直ぐなチャネルと交差しておらず、前記システムは、
湾曲したシャフト組立体であって、
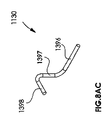
前記第1の真っ直ぐなチャネルに挿入可能であるように構成された湾曲した骨穿刺針と、
前記第1の真っ直ぐなチャネルと前記第2の真っ直ぐなチャネルとの間に湾曲した接合部を形成するために前記湾曲した骨穿刺針を操作するように構成された湾曲針駆動組立体と、
を含む、シャフト組立体と、
縫合スネアワイヤーを前記骨内の前記第2の真っ直ぐなチャネルを経由して縫合スネアワイヤーピックアップ位置に挿入するように構成された縫合スネアワイヤー組立体と、
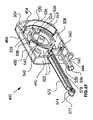
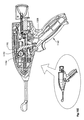
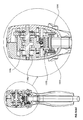
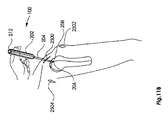
関節鏡下外科装置であって、
手動係合可能駆動ハンドルと、
前記手動係合可能駆動ハンドルの繰り返された手動作動に応答して、連携動作で前記湾曲針駆動組立体を操作して前記縫合スネアワイヤー組立体を部分的に引っ込めるように機能して、前記縫合スネアワイヤーが前記縫合スネアワイヤーピックアップ位置から前記接合部を経て前記第1の真っ直ぐなチャネルを通って引っ張られるようにさせる、連携多機能駆動組立体と、
を含む、関節鏡下外科装置と、
を備える、関節鏡下骨チャネル形成および縫合システム。 - 前記関節鏡下外科装置が、少なくとも1つの開口部を経てアクセス可能であり、かつ、前記湾曲した骨穿刺針が前記第1の真っ直ぐなチャネルへの挿入を開始された後であるが、前記湾曲した骨穿刺針が前記接合部を通して前記縫合スネアワイヤーを引っ張り始める前に、前記湾曲した骨穿刺針を引っ込めるために選択可能に機能するオーバーライド部分組立体を含む、請求項1に記載の関節鏡下骨チャネル形成および縫合システム。
- 前記オーバーライド部分組立体にアクセスするための手動オーバーライドギアシフト装置をさらに備える、請求項2に記載の関節鏡下骨チャネル形成および縫合システム。
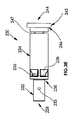
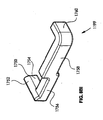
- 前記関節鏡下骨チャネル形成および縫合システムが、作業チャネル組立体をさらに備え、前記作業チャネル組立体が、
中空細長管と、
作業チャネルハブと、
前記作業チャネルハブがその中に少なくとも部分的に据え付けられているラック画定中間要素と、
ストッパー要素と、
を含み、
前記作業チャネル組立体が、前記関節鏡下外科装置に対して延在可能かつ引込み可能であり、かつ前記関節鏡下外科装置に対して選択可能にロック可能であり、
前記ドリルが、前記作業チャネル組立体内に挿入可能であり、かつ前記作業チャネル組立体から引出し可能であり、
前記縫合スネアワイヤー組立体が、前記作業チャネル組立体内に挿入可能であり、かつ前記作業チャネル組立体から引出し可能であり、
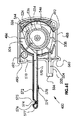
前記中空細長管は、縦軸に沿って延在して、傾斜した前方縁と前記作業チャネルハブ内に形成されたソケット内部に固定して取り付けられた後方端部を有する、請求項1〜3のいずれか一項に記載の関節鏡下骨チャネル形成および縫合システム。 - 前記縫合スネアワイヤー組立体が、
主ハウジング部と、
二次ハウジング部と、
前記主ハウジング部および前記二次ハウジング部に取り付けられる、細長中空シャフトと、
前記細長中空シャフトの上に取り付けられた圧縮ばねと、
前記主ハウジング部内部に取り付けられた張力ばねと、
前記主ハウジング部内部に配置され、かつギアの歯の環状に対称な配列を有する、スネアワイヤー巻取りドラムであって、前記縫合スネアワイヤーが、事前形成されたループを画定するように折り重なったスネアワイヤーを備え、前記スネアワイヤーが、前記細長中空シャフト内部に部分的に配置され、前記ループが、前記細長中空シャフトの前方端部に配置され、かつ前記スネアワイヤー巻取りドラムの周りに部分的に巻かれている、スネアワイヤー巻取りドラムと、
前記スネアワイヤー巻取りドラムと連携する、スネアワイヤー引張要素と、
を備える、請求項1〜4のいずれか一項に記載の関節鏡下骨チャネル形成および縫合システム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/IL2015/050978 WO2017051404A1 (en) | 2015-09-24 | 2015-09-24 | Arthroscopic surgical device |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020165682A Division JP2021000522A (ja) | 2020-09-30 | 2020-09-30 | 関節鏡下外科装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018529418A JP2018529418A (ja) | 2018-10-11 |
| JP2018529418A5 JP2018529418A5 (ja) | 2018-11-22 |
| JP6773769B2 true JP6773769B2 (ja) | 2020-10-21 |
Family
ID=58386291
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018511485A Expired - Fee Related JP6773769B2 (ja) | 2015-09-24 | 2015-09-24 | 関節鏡下外科装置 |
Country Status (10)
| Country | Link |
|---|---|
| US (2) | US10849613B2 (ja) |
| EP (1) | EP3352687A4 (ja) |
| JP (1) | JP6773769B2 (ja) |
| KR (1) | KR20180058729A (ja) |
| CN (1) | CN108430346A (ja) |
| AU (1) | AU2015409833A1 (ja) |
| CA (1) | CA2997050A1 (ja) |
| HK (1) | HK1259295A1 (ja) |
| IL (1) | IL257793A (ja) |
| WO (1) | WO2017051404A1 (ja) |
Families Citing this family (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2012298197B2 (en) | 2011-08-24 | 2016-12-01 | Mininvasive Ltd. | Arthroscopic surgical device |
| US9820754B2 (en) | 2011-08-24 | 2017-11-21 | Mininvasive Ltd. | Circular bone tunneling device employing a stabilizing element |
| AU2012362524B2 (en) | 2011-12-30 | 2018-12-13 | Relievant Medsystems, Inc. | Systems and methods for treating back pain |
| ES2690591T3 (es) | 2012-01-08 | 2018-11-21 | Mininvasive Ltd. | Dispositivo quirúrgico artroscópico |
| CA2889478C (en) | 2012-11-05 | 2020-11-24 | Relievant Medsystems, Inc. | Systems and methods for creating curved paths through bone and modulating nerves within the bone |
| AU2014233765B2 (en) | 2013-03-18 | 2018-03-29 | Mininvasive Ltd. | Arthroscopic surgical device |
| AU2015313815A1 (en) | 2014-09-09 | 2017-04-06 | Mininvasive Ltd. | Padded transosseous suture |
| CN108430346A (zh) * | 2015-09-24 | 2018-08-21 | 米尼维塞夫有限公司 | 关节镜手术装置 |
| WO2017115355A2 (en) * | 2015-12-31 | 2017-07-06 | Mininvasive Ltd. | Arthroscopic surgical device |
| CN109124858B (zh) * | 2018-10-17 | 2020-06-30 | 王英 | 一种防滑落取环器 |
| CN109498090B (zh) * | 2018-12-29 | 2023-12-15 | 北京派尔特医疗科技股份有限公司 | 一种电动腔镜吻合器复位装置及电动腔镜吻合器 |
| CN112089457A (zh) * | 2019-05-30 | 2020-12-18 | 香港大学深圳医院 | 一体式手术缝合器 |
| CN110974325A (zh) * | 2019-12-25 | 2020-04-10 | 山西省肿瘤医院(山西省第三人民医院) | 一种用于胸腔镜手术双针缝合线的尾线收放装置 |
| KR102126675B1 (ko) * | 2020-04-08 | 2020-06-26 | 이유민 | 복강경용 스태플러 |
| US12082876B1 (en) | 2020-09-28 | 2024-09-10 | Relievant Medsystems, Inc. | Introducer drill |
| CN112451020B (zh) * | 2020-11-30 | 2024-06-28 | 重庆德川医疗器械有限公司 | 一种可调节吻合机构的腔镜吻合器 |
| JP2024505335A (ja) | 2020-12-22 | 2024-02-06 | リリーバント メドシステムズ、インコーポレイテッド | 脊椎神経調節の候補の予測 |
Family Cites Families (80)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2579192A (en) | 1950-08-15 | 1951-12-18 | George H Sciaroni | Suturing instrument |
| US4600006A (en) | 1984-01-31 | 1986-07-15 | Baker John W | Cranial perforator |
| DK166600B1 (da) * | 1991-01-17 | 1993-06-21 | Therkel Bisgaard | Vaerktoejssaet til brug ved suturering i dybe operationsaabninger eller legemshulrum |
| US5637112A (en) | 1992-06-08 | 1997-06-10 | Orthopedic Systems, Inc. | Apparatus for attaching suture to bone |
| US5250055A (en) * | 1992-06-08 | 1993-10-05 | Orthopedic Systems Inc. | Method and apparatus for tying suture to bone |
| US5540704A (en) | 1992-09-04 | 1996-07-30 | Laurus Medical Corporation | Endoscopic suture system |
| US5330479A (en) | 1993-03-11 | 1994-07-19 | Whitmore Henry B | Reciprocating bone punch |
| US5509918A (en) | 1993-05-11 | 1996-04-23 | David Romano | Method and apparatus for drilling a curved bore in an object |
| US5656605A (en) | 1994-01-26 | 1997-08-12 | Institute Of Molecular Biology, Inc. | Device to promote drug-induced nerve regeneration |
| US5499991A (en) | 1994-12-19 | 1996-03-19 | Linvatec Corporation | Endoscopic needle with suture retriever |
| US5665096A (en) | 1995-03-07 | 1997-09-09 | Yoon; Inbae | Needle driving apparatus and methods of suturing tissue |
| US5681333A (en) | 1995-11-08 | 1997-10-28 | Arthrex, Inc. | Method and apparatus for arthroscopic rotator cuff repair utilizing bone tunnels for suture attachment |
| US5776150A (en) | 1996-06-10 | 1998-07-07 | Ethicon Endo Surgery, Inc. | Suture assist device |
| IL119151A0 (en) | 1996-06-10 | 1996-11-14 | Influence Med Tech Ltd | Surgical suture insertion device and method for treatment of urinary stress incontinence using fixation to bone |
| IL128261A0 (en) | 1999-01-27 | 1999-11-30 | Disc O Tech Medical Tech Ltd | Expandable element |
| IL135832A0 (en) * | 1999-06-04 | 2001-05-20 | Influence Med Tech Ltd | Bone suturing device |
| IL130307A0 (en) | 1999-06-04 | 2000-06-01 | Influence Med Tech Ltd | Bone suturing device |
| US6523417B1 (en) | 1999-08-17 | 2003-02-25 | Electrical Power & Design, Inc. | End of line seat function and motion tester |
| EP2314257B9 (en) | 2000-05-01 | 2013-02-27 | ArthroSurface, Inc. | System for joint resurface repair |
| US6443963B1 (en) | 2000-07-26 | 2002-09-03 | Orthopaedic Biosystems, Ltd. | Apparatus and method for repairing or reattaching soft tissue |
| US6692516B2 (en) | 2000-11-28 | 2004-02-17 | Linvatec Corporation | Knotless suture anchor and method for knotlessly securing tissue |
| DE60211622T2 (de) | 2001-10-23 | 2007-05-03 | Arthrex Inc., Naples | Chirurgisches Gerät zum Nähen von Gewebe |
| US7494496B2 (en) | 2002-05-17 | 2009-02-24 | Ucl Biomedica Plc | Device for transfixing and joining tissue |
| US7041111B2 (en) | 2002-08-02 | 2006-05-09 | Boston Scientific Scimed, Inc. | Placing sutures |
| US7166116B2 (en) | 2003-06-23 | 2007-01-23 | Ethicon, Inc. | Tissue grasper/suture passer instrument |
| JP2008510526A (ja) | 2004-08-20 | 2008-04-10 | アースロサーフィス・インコーポレーテッド | 逆行処置用のシステムおよび方法 |
| US8123764B2 (en) | 2004-09-20 | 2012-02-28 | Endoevolution, Llc | Apparatus and method for minimally invasive suturing |
| US9463012B2 (en) * | 2004-10-26 | 2016-10-11 | P Tech, Llc | Apparatus for guiding and positioning an implant |
| US8088130B2 (en) | 2006-02-03 | 2012-01-03 | Biomet Sports Medicine, Llc | Method and apparatus for coupling soft tissue to a bone |
| ATE526890T1 (de) | 2005-04-29 | 2011-10-15 | Bovie Medical Corp | Zange zur durchführung einer endoskopischen oder arthroskopischen operation |
| US20060271060A1 (en) | 2005-05-26 | 2006-11-30 | Arthrocare Corporation | Threaded knotless suture anchoring device and method |
| US20070005067A1 (en) | 2005-06-21 | 2007-01-04 | Brian Dross | Arthoscopic method and apparatus for tissue attachment to bone |
| JP4614451B2 (ja) * | 2005-12-26 | 2011-01-19 | 日本シャーウッド株式会社 | 医療用縫合具 |
| EP2083706B1 (en) | 2006-11-07 | 2012-02-01 | Boston Scientific Limited | Delivering sutures |
| US8992533B2 (en) | 2007-02-22 | 2015-03-31 | Spinal Elements, Inc. | Vertebral facet joint drill and method of use |
| DE102007013426A1 (de) | 2007-03-13 | 2008-09-18 | Karl Storz Gmbh & Co. Kg | Vorrichtung zum Befestigen eines chirurgischen Fadens an einem Knochen |
| US20090012538A1 (en) | 2007-07-03 | 2009-01-08 | Justin Saliman | Methods and devices for continuous suture passing |
| US8123747B2 (en) | 2007-08-16 | 2012-02-28 | Nutek Orthopaedics, Inc. | Apparatus for external fixation of a fractured distal radius with angularly adjustable pin clamping means |
| EP2033583B1 (en) | 2007-08-27 | 2013-03-13 | Arthrex, Inc. | In-line suture passer |
| US20090157076A1 (en) | 2007-09-12 | 2009-06-18 | Athas William L | Devices and systems for minimally invasive surgical procedures |
| US7963972B2 (en) | 2007-09-12 | 2011-06-21 | Arthrocare Corporation | Implant and delivery system for soft tissue repair |
| CA2703129C (en) | 2007-10-18 | 2016-02-16 | Neochord Inc. | Minimially invasive repair of a valve leaflet in a beating heart |
| US8236013B2 (en) | 2007-10-19 | 2012-08-07 | Boston Scientific Scimed, Inc. | Apparatus for placing medical implants |
| WO2009061504A1 (en) * | 2007-11-05 | 2009-05-14 | Revolutionary Surgical Device, Llc | Suture passing instrument and method |
| US20090131956A1 (en) * | 2007-11-08 | 2009-05-21 | Jonathan Dewey | Method and apparatus for passing suture through the labrum of a hip joint in order to secure the labrum to the acetabulum |
| US7819296B2 (en) | 2008-02-14 | 2010-10-26 | Ethicon Endo-Surgery, Inc. | Surgical stapling apparatus with retractable firing systems |
| MX2010009000A (es) | 2008-02-28 | 2010-10-25 | T A G Medical Products Corp Ltd | Aparato medico y metodo para unir una sutura a un hueso. |
| US20090270862A1 (en) | 2008-04-25 | 2009-10-29 | Greg Arcenio | Medical device with one-way rotary drive mechanism |
| US20090312782A1 (en) | 2008-06-13 | 2009-12-17 | Maxwell Choongwon Park | Method and apparatus for repairing tendons |
| US8551123B2 (en) | 2008-11-13 | 2013-10-08 | Rajiv D. Pandya | Device for the intraosteal seizing of sutures |
| US8157834B2 (en) | 2008-11-25 | 2012-04-17 | Ethicon Endo-Surgery, Inc. | Rotational coupling device for surgical instrument with flexible actuators |
| CN102292033A (zh) | 2009-01-26 | 2011-12-21 | 斯恩蒂斯有限公司 | 双向缝合线通过器 |
| US8556911B2 (en) | 2009-01-27 | 2013-10-15 | Vishal M. Mehta | Arthroscopic tunnel guide for rotator cuff repair |
| WO2010088561A2 (en) | 2009-01-30 | 2010-08-05 | Kfx Medical Corporation | System and method for attaching soft tissue to bone |
| US20110106124A1 (en) * | 2009-06-16 | 2011-05-05 | Marc Beauchamp | Method and apparatus for arthroscopic rotator cuff repair using transosseous tunnels |
| WO2010144992A1 (en) | 2009-06-16 | 2010-12-23 | Marc Beauchamp | Method and apparatus for arthroscopic rotator cuff repair using transosseous tunnels |
| DK200970073A (en) * | 2009-07-22 | 2011-01-23 | Coloplast As | Suturing system and assembly |
| CN104840227B (zh) * | 2009-11-09 | 2018-02-23 | 奥林巴斯株式会社 | 连结支承器具、内窥镜用处理器具 |
| DE102010020927A1 (de) * | 2010-05-10 | 2011-11-10 | Karl Storz Gmbh & Co. Kg | Medizinisches Instrument mit abnehmbarem Griff |
| WO2011160166A1 (en) | 2010-06-22 | 2011-12-29 | Peter Michael Sutherland Walker | Ligament retainer device and method |
| KR101805448B1 (ko) * | 2010-07-11 | 2017-12-07 | 미닌베이시브 리미티드 | 원형 뼈 터널링 장치 |
| FR2965168A1 (fr) | 2010-09-23 | 2012-03-30 | Tornier Inc | Composant d'implant de suture et dispositif d'implant de suture comprenant un tel composant |
| US8986382B2 (en) | 2011-05-03 | 2015-03-24 | Boston Scientific Neuromodulation Corporation | Tissue fixation and repair systems and methods |
| US9820754B2 (en) * | 2011-08-24 | 2017-11-21 | Mininvasive Ltd. | Circular bone tunneling device employing a stabilizing element |
| AU2012298197B2 (en) * | 2011-08-24 | 2016-12-01 | Mininvasive Ltd. | Arthroscopic surgical device |
| US9314241B2 (en) | 2011-11-10 | 2016-04-19 | Biomet Sports Medicine, Llc | Apparatus for coupling soft tissue to a bone |
| WO2013071234A1 (en) * | 2011-11-11 | 2013-05-16 | Venture Md | Transosseous attachment instrument and anchor |
| EP2779913B1 (en) | 2011-11-14 | 2021-03-31 | ArthroCare Corporation | Tissue repair assembly |
| ES2690591T3 (es) | 2012-01-08 | 2018-11-21 | Mininvasive Ltd. | Dispositivo quirúrgico artroscópico |
| US9060763B2 (en) | 2012-05-07 | 2015-06-23 | Medos International Sàrl | Systems, devices, and methods for securing tissue |
| US9320512B2 (en) | 2012-08-17 | 2016-04-26 | Arthrex, Inc. | Self-cinching soft anchors |
| KR20140099122A (ko) | 2013-02-01 | 2014-08-11 | 삼성전자주식회사 | 전자 장치, 위치 검출 장치, 스피커 자동 설정 시스템 및 방법 |
| US9402620B2 (en) | 2013-03-04 | 2016-08-02 | Howmedica Osteonics Corp. | Knotless filamentary fixation devices, assemblies and systems and methods of assembly and use |
| JP6441300B2 (ja) | 2013-03-12 | 2018-12-19 | ジップテク エルエルシー. | 組織を固定するための装置および方法 |
| AU2014233765B2 (en) * | 2013-03-18 | 2018-03-29 | Mininvasive Ltd. | Arthroscopic surgical device |
| US9877714B2 (en) | 2014-06-04 | 2018-01-30 | Neotract, Inc. | System with reloadable handle for delivering an anchor |
| AU2015313815A1 (en) | 2014-09-09 | 2017-04-06 | Mininvasive Ltd. | Padded transosseous suture |
| CN108430346A (zh) | 2015-09-24 | 2018-08-21 | 米尼维塞夫有限公司 | 关节镜手术装置 |
| WO2017115355A2 (en) | 2015-12-31 | 2017-07-06 | Mininvasive Ltd. | Arthroscopic surgical device |
| US20180256147A1 (en) | 2017-03-07 | 2018-09-13 | Mininvasive Ltd. | Bone suture assembly |
-
2015
- 2015-09-24 CN CN201580083302.2A patent/CN108430346A/zh active Pending
- 2015-09-24 WO PCT/IL2015/050978 patent/WO2017051404A1/en active Application Filing
- 2015-09-24 EP EP15904697.8A patent/EP3352687A4/en not_active Withdrawn
- 2015-09-24 CA CA2997050A patent/CA2997050A1/en not_active Abandoned
- 2015-09-24 KR KR1020187009053A patent/KR20180058729A/ko not_active Application Discontinuation
- 2015-09-24 JP JP2018511485A patent/JP6773769B2/ja not_active Expired - Fee Related
- 2015-09-24 US US15/760,496 patent/US10849613B2/en active Active
- 2015-09-24 AU AU2015409833A patent/AU2015409833A1/en not_active Abandoned
-
2018
- 2018-02-28 IL IL257793A patent/IL257793A/en unknown
-
2019
- 2019-01-30 HK HK19101659.9A patent/HK1259295A1/zh unknown
-
2020
- 2020-09-22 US US17/028,567 patent/US20210077090A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| US20210077090A1 (en) | 2021-03-18 |
| US10849613B2 (en) | 2020-12-01 |
| WO2017051404A1 (en) | 2017-03-30 |
| JP2018529418A (ja) | 2018-10-11 |
| EP3352687A4 (en) | 2019-10-16 |
| HK1259295A1 (zh) | 2019-11-29 |
| CA2997050A1 (en) | 2017-03-30 |
| CN108430346A (zh) | 2018-08-21 |
| US20180242983A1 (en) | 2018-08-30 |
| KR20180058729A (ko) | 2018-06-01 |
| IL257793A (en) | 2018-04-30 |
| AU2015409833A1 (en) | 2018-03-29 |
| EP3352687A1 (en) | 2018-08-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6773769B2 (ja) | 関節鏡下外科装置 | |
| US10835234B2 (en) | Arthroscopic surgical device | |
| US10987112B2 (en) | Surgical drill instrument with motor and locking mechanism to receive an attachment and a cutting burr | |
| US10226248B2 (en) | Surgical fastener applier | |
| EP2823778B1 (en) | Cutting instrument | |
| CA2432732C (en) | Universal handle for surgical instruments | |
| US10441326B2 (en) | Driver instruments and related methods | |
| EP2693957B1 (en) | Surgical drill instrument with motor and locking mechanism to receive an attachment and a cutting burr | |
| EP3517059B1 (en) | Adaptor for use with a driver, a drill, and a cannula for drilling into bone | |
| CN107106186A (zh) | 包含引导系统与骨骼材料移除装置的套件 | |
| WO2021036262A1 (zh) | 用于外科器械的端部执行器驱动装置及外科器械 | |
| JP6548677B2 (ja) | 組織牽引器及び使用方法 | |
| JP6215952B2 (ja) | 骨折時に骨片を固定するための手段 | |
| JP2020018844A (ja) | 回転ノブアセンブリおよびそれを含む手術器具 | |
| JP2021000522A (ja) | 関節鏡下外科装置 | |
| WO2021184402A1 (zh) | 用于椎间孔镜下融合术的持取器及手术器械组件 | |
| WO2009000160A1 (fr) | Tête de coupe rotative pour agrafeuse chirurgicale | |
| EP3785650B1 (en) | All in one plate holder and spring loaded awl | |
| EP2983594B1 (en) | Surgical suture passer | |
| CN220327491U (zh) | 椎间盘髓核切除器械 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180918 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180918 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190628 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190723 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20191018 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200421 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200716 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200901 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201001 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6773769 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |