JP6727857B2 - Case body and louver device including the same - Google Patents
Case body and louver device including the same Download PDFInfo
- Publication number
- JP6727857B2 JP6727857B2 JP2016042048A JP2016042048A JP6727857B2 JP 6727857 B2 JP6727857 B2 JP 6727857B2 JP 2016042048 A JP2016042048 A JP 2016042048A JP 2016042048 A JP2016042048 A JP 2016042048A JP 6727857 B2 JP6727857 B2 JP 6727857B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- case
- arm
- link
- lock piece
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007246 mechanism Effects 0.000 claims description 52
- 125000006850 spacer group Chemical group 0.000 claims description 28
- 230000002093 peripheral effect Effects 0.000 claims description 17
- 239000000463 material Substances 0.000 claims description 7
- 230000000149 penetrating effect Effects 0.000 claims description 6
- 239000011347 resin Substances 0.000 claims description 4
- 229920005989 resin Polymers 0.000 claims description 4
- 230000009467 reduction Effects 0.000 description 45
- 230000033001 locomotion Effects 0.000 description 13
- 230000005540 biological transmission Effects 0.000 description 7
- 238000005452 bending Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 238000006073 displacement reaction Methods 0.000 description 4
- WABPQHHGFIMREM-UHFFFAOYSA-N lead(0) Chemical compound [Pb] WABPQHHGFIMREM-UHFFFAOYSA-N 0.000 description 4
- 239000002184 metal Substances 0.000 description 4
- 230000015572 biosynthetic process Effects 0.000 description 3
- 230000005856 abnormality Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000000465 moulding Methods 0.000 description 2
- 238000004904 shortening Methods 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 1
- 150000001875 compounds Chemical class 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005489 elastic deformation Effects 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 239000011435 rock Substances 0.000 description 1
Images











Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16B—DEVICES FOR FASTENING OR SECURING CONSTRUCTIONAL ELEMENTS OR MACHINE PARTS TOGETHER, e.g. NAILS, BOLTS, CIRCLIPS, CLAMPS, CLIPS OR WEDGES; JOINTS OR JOINTING
- F16B5/00—Joining sheets or plates, e.g. panels, to one another or to strips or bars parallel to them
- F16B5/07—Joining sheets or plates, e.g. panels, to one another or to strips or bars parallel to them by means of multiple interengaging protrusions on the surfaces, e.g. hooks, coils
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24F—AIR-CONDITIONING; AIR-HUMIDIFICATION; VENTILATION; USE OF AIR CURRENTS FOR SCREENING
- F24F13/00—Details common to, or for air-conditioning, air-humidification, ventilation or use of air currents for screening
- F24F13/08—Air-flow control members, e.g. louvres, grilles, flaps or guide plates
- F24F13/10—Air-flow control members, e.g. louvres, grilles, flaps or guide plates movable, e.g. dampers
- F24F13/14—Air-flow control members, e.g. louvres, grilles, flaps or guide plates movable, e.g. dampers built up of tilting members, e.g. louvre
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/116—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears
Description
本発明は、ケース体およびこれを備えたルーバー装置に関する。 The present invention relates to a case body and a louver device including the case body.
下記特許文献1には、ケース(第2ケース312,322)に設けられた円弧状のカム面(ガイド面322e)に沿って、風向板(ルーバ5)を支持するアーム(第1ルーバ支持部材21、第2ルーバ支持部材22)のカムフォロア部(円弧部213,223)を摺動させることにより、アームを後退位置と前進位置との間で往復移動させるルーバー装置(ルーバ装置1)が開示されている。
In Patent Document 1 below, an arm (first louver support member) that supports the wind direction plate (louver 5) along an arcuate cam surface (guide surface 322e) provided on the case (
上記特許文献1のルーバー装置は、風向板を支持するアームを前進位置に移動させ、風向板をエアコン本体から遠ざけて回動させる。そのため、上記特許文献1のルーバー装置は、アームがユーザーの目に触れやすく、アームに高い意匠性が要求される。特に、アーム内にモータ等の駆動源を配置すべく、複数のケース部材を嵌合することでアームを形成する場合、これらケース部材の係止部がユーザーから視認可能な位置に設けられていると、この露出した係止部がアームの意匠性を損ねるという課題がある。 In the louver device of Patent Document 1, the arm supporting the wind direction plate is moved to the forward position, and the wind direction plate is rotated away from the air conditioner body. Therefore, in the louver device of Patent Document 1, the arm is easily touched by the user, and the arm is required to have high designability. Particularly, when the arm is formed by fitting a plurality of case members in order to arrange a drive source such as a motor in the arm, the locking portions of these case members are provided at positions visible to the user. Then, there is a problem that the exposed locking portion impairs the design of the arm.
また、上記特許文献1のルーバー装置では、アームを前進位置に移動させたときに、アームおよび風向板の荷重をアームの基端部およびケース(第1固定体31、第2固定体32)の開口近傍部のみで支える必要がある。特にアームのうちの一本(第1ルーバ支持部材21)には、風向板を回動させるためのモータ(第2モータ81)がその先端部に配置されており、さらに、風向板が受ける風圧もかかる荷重を大きくする。荷重を支持する応力が集中する部分の破損や変形を防止するため、特許文献1のアームおよびケースには相応の剛性をもたせる必要があり、部材の小型化が難しいという課題がある。
Further, in the louver device of Patent Document 1, when the arm is moved to the forward position, the load of the arm and the wind direction plate is applied to the base end portion of the arm and the case (the first
上記問題に鑑み、本発明が解決しようとする課題は、ケース部材の係止部が外部から視認不能に設けられることで意匠性が高められたケース体、および、このケース体を備え、風向板およびアームの荷重を分散して支持することが可能なルーバー装置を提供することにある。 In view of the above problem, the problem to be solved by the present invention is to provide a case body whose design is improved by providing the locking portion of the case member invisible from the outside, and a wind direction plate including the case body. Another object of the present invention is to provide a louver device capable of dispersing and supporting the load of the arm.
上記課題を解決するため、本発明のケース体は、互いに嵌合される第1ケース部材および第2ケース部材を備え、前記第1ケース部材の内面には、該内面を基端としてその先端が該第1ケース部材の内側に突き出した突起部であるロック片が形成されており、前記第2ケース部材には、前記ロック片に係合する貫通孔であるロック穴が形成されており、前記第1ケース部材の前記第2ケース部材への嵌合方向における前記ロック片の厚みは、その基端側よりも先端側が薄くなるように形成されており、前記ロック片の基端から先端までの長さは、前記第1ケース部材および前記第2ケース部材が嵌め合わされたときに、前記ロック穴を貫通する長さであり、前記ケース体のケース内にモータとともに収容され、該ケース内における該モータの位置を固定するスペーサー部材をさらに備え、前記モータの軸方向に沿う方向を前記ケース内における上下方向としたときに、前記スペーサー部材は、前記モータの出力軸側の端面を押さえることで前記ケース内における該モータの上下方向の位置を固定し、前記モータは、前記端面から前記出力軸の外周面に沿って円筒状に延びる軸受部を有するモータであり、前記スペーサー部材には、前記モータの前記軸受部が圧入される貫通孔である軸受固定穴が形成されており、前記ケース内における前記モータの外周面の周囲には、隙間が設けられ、前記スペーサー部材は、前記ケース内におけるその周方向角度および径方向位置が固定されており、前記モータは、前記端面から垂直に延びる棒状体である支軸を有するモータであり、前記スペーサー部材には、前記モータの前記支軸が圧入される貫通孔である支軸固定穴が形成されており、前記モータは、該モータの前記軸受部が前記スペーサー部材の前記軸受固定穴に、該モータの前記支軸が前記スペーサー部材の前記支軸固定穴にそれぞれ圧入されることにより、前記ケース内におけるその周方向角度および径方向位置が固定されることを特徴とする。 In order to solve the above-mentioned problems, a case body of the present invention includes a first case member and a second case member that are fitted to each other, and an inner surface of the first case member has a distal end with the inner surface as a base end. A lock piece that is a protrusion protruding inside the first case member is formed, and a lock hole that is a through hole that engages with the lock piece is formed in the second case member. The thickness of the lock piece in the fitting direction of the first case member with respect to the second case member is formed such that the tip side is thinner than the base end side, and the thickness from the base end to the tip of the lock piece is smaller. length, when the first case member and the second case member is fitted, the length der penetrating the lock hole is, housed together with the motor within the case body of the case, in the the case A spacer member for fixing the position of the motor is further provided, and when the direction along the axial direction of the motor is the vertical direction in the case, the spacer member holds down the end surface on the output shaft side of the motor. The vertical position of the motor in the case is fixed, and the motor has a bearing portion that extends in a cylindrical shape from the end surface along the outer peripheral surface of the output shaft, and the spacer member includes: A bearing fixing hole, which is a through hole into which the bearing portion of the motor is press-fitted, is formed, a gap is provided around the outer peripheral surface of the motor in the case, and the spacer member is provided in the case. The circumferential angle and radial position are fixed, and the motor is a motor having a support shaft that is a rod-shaped body that extends vertically from the end surface, and the support shaft of the motor is press-fitted into the spacer member. A supporting shaft fixing hole that is a through hole is formed, and in the motor, the bearing portion of the motor is in the bearing fixing hole of the spacer member, and the supporting shaft of the motor is the supporting member of the spacer member. It is characterized in that the angle in the circumferential direction and the position in the radial direction in the case are fixed by being press-fitted into the shaft fixing holes, respectively .
第1ケース部材および第2ケース部材を係止するロック片およびロック穴が、ケース体の内側に配置される構成とすることにより、これらを外部から隠蔽することができ、ケース体の意匠性を高めることができる。 With the configuration in which the lock piece and the lock hole for locking the first case member and the second case member are arranged inside the case body, these can be hidden from the outside, and the design of the case body can be improved. Can be increased.
通常、ロック片とロック穴を用いた係止構造では、ロック片はロック穴を突き抜けない程度のサイズに設定される。ロック片がロック穴を貫通してしまうと、ロック片の先端がケース内の収容物などを損傷させるおそれがあるからである。本発明のロック穴は、ロック片よりもケース体の内側に配置されることから、例えばケース内の収容物がロック穴の近傍まで迫っている場合、ロック穴のケース内側への変位が制限される。この状況下で通常の高さのフックを用いると、ロック片の先端がロック穴の縁に乗り上げ、ケース体をいくら嵌め合わせてもケース体がロックされないという不具合が生じることがある。一方、ロック片がロック穴に入り込みやすくなるよう、ロック穴の位置をロック片に近づけるよう設計を変更したり、ロック片の位置をロック穴に近づけるよう設計を変更したりすると、係止後のケース体が十分に固定されず、ケース体にガタツキが生じることとなる。 Usually, in a locking structure using a lock piece and a lock hole, the lock piece is set to a size that does not penetrate the lock hole. This is because, if the lock piece penetrates the lock hole, the tip of the lock piece may damage an item contained in the case. Since the lock hole of the present invention is arranged inside the case body rather than the lock piece, for example, when the contents in the case are close to the lock hole, the displacement of the lock hole to the inside of the case is limited. It If a hook with a normal height is used in this situation, the tip of the lock piece may ride on the edge of the lock hole, and the case may not be locked no matter how many cases are fitted. On the other hand, in order to make it easier for the lock piece to enter the lock hole, change the design so that the position of the lock hole is closer to the lock piece, or change the design so that the position of the lock piece is closer to the lock hole. The case body is not fixed sufficiently, which causes rattling of the case body.
本発明のロック片は、あえてロック穴を貫通する長さ(高さ)に設定されていることから、ケース体を嵌合する際の第1ケース部材の変形量が大きくなり、ロック片がロック穴に強力に押しつけられることとなる。さらに、本発明のロック片はその基端よりも先端の厚みが薄くなるよう形状されているから、ロック片の先端は湾曲しやすくなっている。これにより、本発明のケース体は、ロック穴のケース内側への変位が制限されている場合でも、ロック片がロック穴に入り込みやすく、ケース体がロックされないという不具合を回避することが可能とされている。また、通常、モータは、モータケース内の空間の成形精度は高いものの、個体ごとのモータケースの肉厚のバラつきなど、モータケースの外面には内面よりも大きな誤差が現れることが見込まれる。そのため、ケース体の内部におけるモータの位置決めを例えばモータケースの外周面を支持することで行うような場合には、モータがケース体に収まらなかったり、逆にモータにガタツキが生じたりすることがある。本構成のケース体は、ケース内におけるモータの位置決めを行うスペーサー部材を別途備え、スペーサー部材を用いてケース内におけるモータの上下方向の位置を固定し、さらにモータケースの外周面に比べて誤差の影響が小さい軸受部でモータを支持することにより、モータケースの外面に現れる誤差を吸収することが可能とされている。さらに、ケース内に固定されたスペーサー部材でモータの軸受部および支軸の二点を支持することにより、ケース内におけるモータの上下方向位置およびその出力軸の位置のみならず、モータの周方向角度も固定することができる。これにより、モータケースの外面に現れる誤差を吸収しつつ、ケース内におけるモータの絶対位置を固定することが可能となり、モータのガタツキに伴う騒音や部品寿命の低下を抑えることができる。 Since the lock piece of the present invention is intentionally set to the length (height) that penetrates the lock hole, the deformation amount of the first case member when the case body is fitted becomes large, and the lock piece is locked. It will be pressed strongly into the hole. Further, since the lock piece of the present invention is shaped such that the thickness of the tip end is smaller than that of the base end, the tip end of the lock piece is easily bent. Accordingly, the case body of the present invention can avoid the problem that the lock piece easily enters the lock hole and the case body is not locked even when the displacement of the lock hole to the inside of the case is limited. ing. Further, normally, in a motor, although the molding accuracy of the space inside the motor case is high, it is expected that a larger error will appear on the outer surface of the motor case than on the inner surface, such as variation in the thickness of the motor case among individuals. Therefore, when positioning the motor inside the case body by, for example, supporting the outer peripheral surface of the motor case, the motor may not fit in the case body, or conversely, the motor may rattle. .. The case body of this configuration is provided with a spacer member for positioning the motor in the case separately, and the vertical position of the motor in the case is fixed by using the spacer member. By supporting the motor with a bearing portion that has a small influence, it is possible to absorb an error that appears on the outer surface of the motor case. Furthermore, by supporting two points of the motor bearing and the support shaft with a spacer member fixed in the case, not only the vertical position of the motor and the position of its output shaft in the case, but also the circumferential angle of the motor Can also be fixed. As a result, it is possible to fix the absolute position of the motor in the case while absorbing the error that appears on the outer surface of the motor case, and it is possible to suppress the noise and the shortening of the component life due to rattling of the motor.
また、前記ロック片の基端から先端までの長さを該ロック片の高さとしたときに、前記第1ケース部材は、前記ロック片の高さ方向に、該ロック片の高さ程度の弾性変形が可能な可撓性材料からなることが好ましい。また、前記第1ケース部材は樹脂材料からなることが好ましい。 Further, when the length from the base end to the tip of the lock piece is taken as the height of the lock piece, the first case member is elastic in the height direction of the lock piece in the height direction of the lock piece. It is preferably made of a deformable flexible material. Further, it is preferable that the first case member is made of a resin material.
前記第1ケース部材に樹脂材料などの可撓性材料が用いられることにより、第1ケース部材の変形を利用した嵌合が可能となる。 By using a flexible material such as a resin material for the first case member, fitting using deformation of the first case member becomes possible.
上記課題を解決するため、本発明のルーバー装置は、第1駆動源と、前記第1駆動源の駆動力により揺動するリンク機構と、前記リンク機構を収容可能な固定部と、を備え、前記リンク機構は、本発明のケース体を有するアーム部材と、該アーム部材を支持し、該アーム部材を延出方向および収納方向へ往復移動させる複数のリンク部材を有しており、前記複数のリンク部材は、前記第1駆動源により駆動される駆動リンクと、該駆動リンクの動作に前記アーム部材を介して追従する従動リンクと、を有しており、前記駆動リンクは、その先端側が前記アーム部材に、基端側が前記第1駆動源に直接または他の部材を介して連結されており、前記従動リンクは、その先端側が前記アーム部材に、基端側が前記固定部に連結されており、前記アーム部材のその延出方向側の端部には、板状部材である風向板が回動可能に連結されていることを特徴とする。 In order to solve the above problems, a louver device of the present invention includes a first drive source, a link mechanism that swings by the driving force of the first drive source, and a fixing portion that can house the link mechanism, The link mechanism includes an arm member having the case body of the present invention , and a plurality of link members that support the arm member and reciprocate the arm member in the extending direction and the storing direction. The link member has a drive link driven by the first drive source, and a driven link that follows the operation of the drive link via the arm member, and the drive link has the tip end side of the drive link. The arm member has a base end side connected to the first drive source directly or via another member, and the driven link has a tip end side connected to the arm member and a base end side connected to the fixed portion. A wind direction plate, which is a plate-shaped member, is rotatably connected to an end portion of the arm member on the extending direction side .
風向板を開閉するアーム部材をリンク機構で往復移動させることにより、風向板とアーム部材の荷重を各リンク部材に分散させることができる。これにより荷重を支持する応力が一部のみに集中することを防ぐことができ、装置全体の小型化を図ることが可能になる By reciprocally moving the arm member that opens and closes the wind direction plate by the link mechanism, the load of the wind direction plate and the arm member can be dispersed to each link member. As a result, it is possible to prevent the stress supporting the load from concentrating only on one part, and it is possible to reduce the size of the entire device.
また、前記リンク機構は前記アーム部材を中間リンクとする四節リンク機構であり、前記従動リンクは前記駆動リンクよりも前記アーム部材の延出方向側に配置されていることが好ましい。 Further, it is preferable that the link mechanism is a four-joint link mechanism that uses the arm member as an intermediate link, and the driven link is arranged on the extension direction side of the arm member with respect to the drive link.
リンク機構を四節リンクとすることにより、リンク機構によるアーム部材の往復移動を最小の部品点数で実現することができる。また、従動リンクは第1駆動源に連結される必要がないことから、駆動リンクに比べてその配置場所に関する制約が少ない。そのため、従動リンクを駆動リンクよりもアーム部材の延出方向側に配置することにより、従動リンクを装置の延出方向側の端部に配置することができ、アーム部材をより遠くまで支持することが可能となる。 By making the link mechanism a four-bar link, the reciprocating movement of the arm member by the link mechanism can be realized with a minimum number of parts. Further, since the driven link does not need to be connected to the first drive source, there are less restrictions on the location of the driven link as compared with the drive link. Therefore, by disposing the driven link on the extension direction side of the arm member with respect to the drive link, the driven link can be disposed on the end portion on the extension direction side of the device, and the arm member can be supported farther. Is possible.
また、前記アーム部材のその延出方向側の端部には、第2駆動源が配置され、前記風向板は前記第2駆動源の駆動力により所定の角度範囲内において回動可能であることが好ましい。 A second drive source is arranged at an end of the arm member on the extension direction side , and the wind direction plate is rotatable within a predetermined angle range by a driving force of the second drive source. Is preferred.
アーム部材の延出方向の側端部に設けた第2駆動源により風向板を回動させることで、風向板のより複雑な動作が可能となり、風向制御の自由度を高めることができる。 By rotating the wind direction plate by the second drive source provided at the side end portion in the extending direction of the arm member, more complicated operation of the wind direction plate can be performed, and the degree of freedom in controlling the wind direction can be increased.
また、前記第2駆動源はステッピングモータであることが好ましい。 Further, the second drive source is preferably a stepping motor.
ステッピングモータは正逆両方向に回転可能であり、また、ステップ数によりその回転角度を算出することができる。よって、風向板のその時々における配置角度を検出するために別途ロータリエンコーダなどによるフィードバック制御を行う必要がない。これにより、装置全体における部品点数の削減および装置の小型化を図ることができる。 The stepping motor can rotate in both forward and reverse directions, and its rotation angle can be calculated from the number of steps. Therefore, it is not necessary to separately perform feedback control by a rotary encoder or the like in order to detect the arrangement angle of the wind direction plate at each time. As a result, it is possible to reduce the number of parts in the entire device and reduce the size of the device.
本発明のケース体およびこれを備えたルーバー装置によれば、ケース体の意匠性を高めることができ、また、風向板およびアームの荷重を分散して支持することが可能となる。 According to the case body and the louver device including the case body of the present invention, the design of the case body can be improved, and the loads of the wind direction plate and the arms can be dispersed and supported.
以下、本発明にかかるルーバー装置の実施形態について図面を用いて説明する。本実施形態にかかるルーバー装置は、図示しない空調機の送風口に設置され、その風向を制御する装置である。尚、以下の説明において「幅方向」とは、図1の座標軸表示に示されるX方向を、「前後方向」とは同座標軸表示に示されるY方向を、「上下方向」とは同座標軸表に示されるZ方向をいう。 Embodiments of a louver device according to the present invention will be described below with reference to the drawings. The louver device according to the present embodiment is a device that is installed at a blower opening of an air conditioner (not shown) and controls the wind direction thereof. In the following description, the "width direction" means the X direction shown on the coordinate axis display in FIG. 1, the "front-back direction" means the Y direction shown on the same coordinate axis display, and the "vertical direction" means the same coordinate axis table. The Z direction shown in FIG.
(全体構成)
図1はルーバー装置の配置構成の一例を示す外観斜視図である。図1の配置例では、一枚の共通の風向板91を、二台のルーバー装置10,10´および一台のサポートユニット70(以下、これらを総称して「ルーバー装置10等」ともいう。)で支持している。二台のルーバー装置10,10´は同一の装置であり、以下に説明するルーバー装置10の構成はルーバー装置10´の構成でもある。これらルーバー装置10等はいずれも、風向板91よりも後方(図示しない空調機の筐体側)に配置されている。ルーバー装置10,10´は風向板91の長手方向における両端近傍に配置され、サポートユニット70は同長手方向における略中央に配置されている。
(overall structure)
FIG. 1 is an external perspective view showing an example of the arrangement of the louver device. In the arrangement example of FIG. 1, one common
風向板91のルーバー装置10等との対向面には、ルーバー装置10等との連結部であるアーム接続片911,912が形成されている。風向板91は、ルーバー装置10等のアーム42,72に設けられた風向板接続部262,721にアーム接続片911,912が結合されることにより、これらアーム42,72に支持されるとともに、これらアーム42,72と一体的に動作する。
On the surface of the
ルーバー装置10,10´は、ルーバー装置10,10´が備える駆動源の駆動力により風向板91を開閉および回動させる駆動装置である。一方、サポートユニット70はこれらルーバー装置10,10´の動作に追従して風向板91を支持する補助的なユニットである。風向板91の長手方向における長さが短い場合や、ルーバー装置10,10´で風向板91の両端のみを支持した場合でも、風向板91が自重によりたわみが生じない程度の剛性を備えている場合には、サポートユニット70は省略しても良い。
The
(ルーバー装置の内部構造)
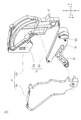
図2はルーバー装置10(およびルーバー装置10´)の内部構造を示す分解斜視図である。ルーバー装置10は、ステッピングモータである第1モータ20(第1駆動源)と、第1モータ20の駆動力により揺動するリンク機構40と、第1モータ20の回転を減速してリンク機構40に伝達する減速歯車列30と、リンク機構40および減速歯車列30を収容するケース50(固定部)と、を備えている。
(Internal structure of louver device)
FIG. 2 is an exploded perspective view showing the internal structure of the louver device 10 (and the louver device 10'). The
リンク機構40は、二つのリンク部材41と、これらリンク部材41に支持されて後述する延出方向Aおよび収納方向B(図6参照)へ往復移動するアーム42(アーム部材)と、を有している。リンク部材41は、第1モータ20により駆動される駆動リンク411と、駆動リンク411の動作にアーム42を介して追従する従動リンク412と、を有している。リンク機構40は、駆動リンク411および従動リンク412のほか、ケース50を固定リンクとし、アーム42を中間リンクとする四節リンク機構を構成している。
The
ケース50は、幅方向Xに分解可能な第1ケース半体51、第2ケース半体52、および中板53により構成される。これら第1ケース半体51、第2ケース半体52、および中板53は止めねじ59で結合されることにより一体化される。リンク機構40は、第1ケース半体51および中板53により区画される空間に配置され、減速歯車列30は、第2ケース半体52および中板53により区画される空間に配置される。
The
第1モータ20は第2ケース半体52の底面(幅方向Xに直交する面)の外側に配置され、止めねじ29により第2ケース半体52に固定される。第2ケース半体52の底面における、第1モータ20のピニオンギヤ21の位置に対応する部位には、第2ケース半体52の開口側(ケース50の内部側)に向かって突出した有蓋筒状のピニオンカバー部521が設けられている。ピニオンカバー部521はピニオンギヤ21側が開口しており、ピニオンギヤ21はピニオンカバー部521の内側に収容される。ピニオンカバー部521には、その周方向の一部が切り欠かれた開口部である窓部521aが設けられており、ピニオンカバー部521内に収容されたピニオンギヤ21は、その一部の歯部が窓部521aから第2ケース半体52の内側に露出している。
The
減速歯車列30は、それぞれ大径歯車部および小径歯車部を備える複合歯車の輪列である。減速歯車列30の各歯車部材はそれぞれ、第2ケース半体52と中板53との間に立設された支軸36に回転可能に支持されている。減速歯車列30は、第1モータ20のピニオンギヤ21の回転を、大径歯車部から小径歯車部へと順次伝達することにより、ピニオンギヤ21の回転を減速して駆動リンク411の歯車部411cに伝達する。第1モータ20の回転を減速して駆動リンク411に伝達することにより、一般的な出力のモータを用いてアーム42を往復移動させることが可能とされている。
The
リンク機構40を構成する駆動リンク411の基端部(基端側)には、幅方向Xに貫通された貫通孔411bが形成されており、第2ケース半体52に立設された支軸522が貫通孔411bに挿通されることで、駆動リンク411の基端部はケース50に回転可能に支持される。
A through
また、駆動リンク411の基端部には、減速歯車列30側に向かって延びる歯車部411cが設けられている。中板53における歯車部411cの位置に対応する部位には、歯車部411cが挿通される切欠部533が形成されている。歯車部411cは、切欠部533に挿通されることにより、中板53を貫通して減速歯車列30の最終歯車と噛合する。歯車部411cが減速歯車列30の最終歯車と噛合することにより、第1モータ20の駆動力は減速歯車列30および歯車部411cを介して駆動リンク411へと伝達される。
A
リンク機構40の従動リンク412は、その基端部(基端側)に、軸線が幅方向Xと平行な略円筒形状の軸体412bが設けられている。第1ケース半体51および第2ケース半体52における軸体412bの位置に対応する部位には、幅方向Xに貫通された円形の貫通孔である軸受513,523が形成されている。従動リンク412は、軸体412bが軸受513,523に嵌合されることによりケース50に回転可能に支持される。
The driven
尚、本発明でいうリンク部材41(駆動リンク411、従動リンク412)の「基端」とは、固定関節、つまり所定位置に固定され、回転は許容されるが上下方向Zおよび前後方向Yへの揺動が規制された端部をいい、「先端」とは、自由関節、つまり回転および揺動が許容された端部をいう。
The “base end” of the link member 41 (driving
また、本実施形態においては、駆動リンク411および従動リンク412の基端部がいずれもケース50に支持されているが、これら基端部は必ずしもケース50に支持される必要はない。例えば、図示しない空調機の筐体など、位置が固定された部材(固定部)であって、上記基端部を回転可能に支持することができ、かつアーム42および風向板91の荷重により変形しない程度の剛性を備える部材であれば、ケース50に代替可能である。
Further, in the present embodiment, the base ends of the
(アームの内部構造)
図3はアーム42の内部構造を示す分解斜視図である。アーム42は、アーム42のケース体であるアームケース42aを備えている。アームケース42aは、幅方向Xに嵌合された第1ケース部材である第1アーム半体421、および第2ケース部材である第2アーム半体422により構成されている。第1アーム半体421および第2アーム半体422の延出方向A側の端部には、嵌合された該端部を係止するフック部426およびロック穴427がそれぞれ設けられており、第1アーム半体421および第2アーム半体422は、これらフック部426およびロック穴427と3本の止めねじ429により固定される。
(Internal structure of arm)
FIG. 3 is an exploded perspective view showing the internal structure of the
アームケース42aの延出方向A側の端部およびその近傍部には、第2駆動源である第2モータ25が収容されるモータ室43が設けられている。第2モータ25は風向板91を所定の角度範囲内において回動させるステッピングモータである。第2モータ25のDカットが施された出力軸253にはピニオンギヤ261が装着されている。また、第2モータ25に移動不能に固定され、出力軸253の軸方向と平行に延びる棒状体である支軸252(後述)には、風向板接続部262が回転可能に支持されている。ピニオンギヤ261の回転は風向板接続部262の歯車部262aを介して減速され、風向板接続部262へと伝達される。本実施形態においては、第2モータ25に固定された支軸252により風向板接続部262が支持されていることで、出力軸253に対する風向板接続部262の相対的な位置関係が一定に保たれている。これにより、ピニオンギヤ261と風向板接続部262の歯車部262aの噛合い精度が高められ、これら歯車部材のガタツキによる騒音や部品寿命の低下が抑えられている。
A
第2アーム半体422のモータ室43を構成する部位には、幅方向Xに貫通された円形の開口部422aが形成されており、風向板接続部262は開口部422aからアームケース42aの外部に露出している。これにより、アーム42の風向板接続部262と風向板91のアーム接続片911とが結合可能となる。風向板91を第2モータ25により回動させる構成とすることにより、風向板91のより複雑な動作が可能となり、風向制御の自由度が高められている。
A
アームケース42aにおける、モータ室43よりも収納方向B側の部分には、波形に形成されたリブ423がその内部に設けられており、リブ423によりアームケース42aの剛性が高められている。尚、リブ423の一部は、後述する第2揺動規制部65のアーム側当接部67としての用途を兼ねている。
A
図8は第2モータ25のリード線93の取り回し構造を説明する図である。第2モータ25のコネクタ259に接続されたリード線93は、アーム42の内部におけるリブ423の上側に設けられた隙間を通ってケース50内へと引き込まれる。ケース50内に引き込まれたリード線93は、駆動リンク411の上側を通って中板53の後方(図8視左側)に形成されたガイド片532に引き込まれ、そしてガイド片532に案内されて引出口54からルーバー装置10の外部へと引き出される。尚、図8(b)に示すように、引出口54は第1ケース半体51および第2ケース半体52により区画される開口である。
FIG. 8 is a view for explaining the structure for arranging the
(スペーサー部材の構成)
アームケース42aのモータ室43には、第2モータ25とともに、モータ室43内における第2モータ25の位置を固定するスペーサー部材27が収容されている。スペーサー部材27は、略円板形状の平板部271と、平板部271の周縁から第2モータ25側に延びる一対の側板部272とにより構成されている。一対の側板部272は、平板部271の周縁において線対称となる位置および範囲に形成されている。
(Structure of spacer member)
The
第2モータ25の軸方向に沿う方向(本実施形態においては幅方向Xに平行する方向)をモータ室43の内部における上下方向(第1アーム半体421側を「下」、第2アーム半体422側を「上」とする。以下、モータ室43内部の説明において「上」および「下」とは同上下方向をいうものとする。)としたときに、スペーサー部材27の平板部271は、第2モータ25の出力軸253側の端面である上面251に被せられ、上面251を下方に押さえることで、モータ室43内における第2モータ25の上下方向の位置を固定する。一対の側板部272は、第2アーム半体422の内周面および第2モータ25の外周面25aとは接触しておらず、これらの間にはそれぞれ隙間が設けられている。また、第2モータ25の外周面25aとモータ室43の内周面43aも接触はしておらず、これらの間には隙間が設けられている。
A direction along the axial direction of the second motor 25 (a direction parallel to the width direction X in the present embodiment) is a vertical direction inside the motor chamber 43 (the first
スペーサー部材27の平板部271における第2アーム半体422側の面には、第2アーム半体422側に延びる略円筒状の回り止めスリーブ273が二つ形成されている。各回り止めスリーブ273は、その周方向の一部にスリットが設けられており、これにより径方向外側への弾性変形が可能となっている。第2アーム半体422のモータ室43内面には、各回り止めスリーブ273の形成位置に対応する位置に、各回り止めスリーブ273に嵌合される突起部である回り止めピン424が形成されている。これら回り止めピン424と回り止めスリーブ273とが嵌合されることにより、スペーサー部材27は、モータ室43内におけるその周方向角度および径方向位置(上下方向に直交する方向における位置。以下の説明においても同じ。)が固定される。
On the surface of the
第2モータ25の上面251には、上面251から出力軸253の外周面に沿って円筒状に延びる軸受部251aが形成されており、平板部271における軸受部251aの形成位置に対応する位置には、軸受部251aが圧入される貫通孔である軸受固定穴271aが形成されている。さらに、第2モータ25の上面251には、上面251から垂直に延びる棒状体である支軸252が移動不能に固定されており、平板部271における支軸252の形成位置に対応する位置には、支軸252が圧入される貫通孔である支軸固定穴271bが形成されている。上で述べたように、スペーサー部材27はモータ室43内におけるその位置や角度が固定されている。第2モータ25は、その軸受部251aがスペーサー部材27の軸受固定穴271aに、その支軸252がスペーサー部材27の支軸固定穴271bにそれぞれ圧入されることにより、スペーサー部材27に対する相対的な周方向角度およびモータ室43内における径方向位置が固定される。つまり、モータ室43内における第2モータ25の絶対位置が固定される。
A bearing
通常、モータは、モータケース内の空間の成形精度は高いものの、個体ごとのモータケースの肉厚のバラつきなど、モータケースの外面には内面よりも大きな誤差が生じことが見込まれる。そのため、ケース体の内部におけるモータの位置決めを例えばモータケースの外周面を支持することにより行うような場合には、モータがケース体に収まらなかったり、逆にモータにガタツキが生じたりすることがある。本実施形態のモータ室43は、第2モータ25の外周面25aの周囲に隙間を設けつつ、モータ室43内に別途備えたスペーサー部材27を第2モータ25の上面251に被せ、成形誤差の影響が小さい軸受部251aと支軸252を利用して、モータ室43内における第2モータ25の絶対位置を固定することにより、第2モータ25の外面に現れる誤差を吸収しつつ、第2モータ25のガタツキに伴う騒音や部品寿命の低下を抑えることが可能とされている。
Normally, in a motor, although the molding accuracy of the space in the motor case is high, it is expected that the outer surface of the motor case will have a larger error than the inner surface due to variations in the thickness of the motor case for each individual. Therefore, when positioning the motor inside the case body by, for example, supporting the outer peripheral surface of the motor case, the motor may not fit in the case body, or conversely, the motor may rattle. .. In the
(アームケースの係止構造)
図12は、フック部426およびロック穴427を用いたアームケース42aの係止構造の説明図である。図12(a)はアーム42を第2アーム半体422側から見た平面図、図12(b)は図12(a)のC−C方向断面図、図12(c)は図12(b)の破線Dで囲んだ部分の拡大図である。
(Arm case locking structure)
FIG. 12 is an explanatory diagram of a locking structure of the
図12(c)に示すように、フック部426は、第1アーム半体421のモータ室43の内周面43aを基端としてその先端がモータ室43の内側に突き出した突起部である。第2アーム半体422は、フック部426の形成位置に対応する位置に舌片状のストッパ部422cを有しており、ストッパ部422cには、フック部426に係合する貫通孔であるロック穴427が形成されている。フック部426およびロック穴427は、アームケース42aの延出方向A側の端部を係止する一対のロック片およびロック穴である。これらフック部426およびロック穴427がアームケース42aの内側に配置されていることにより、これらが外部から隠蔽され、アームケース42aの意匠性が高められている。
As shown in FIG. 12( c ), the
これら第1アーム半体421および第2アーム半体422の嵌合方向(本実施形態においては幅方向X)におけるフック部426の厚みは、その基端側よりも先端側が薄くなるように形成されている。より具体的には、フック部426は、図12(c)においてフック部426の上面に相当する面が、その基端から先端に向かって漸次低くなるテーパ面426aとして形成されている。
The thickness of the
また、ストッパ部422cの先端部には、第1アーム半体421および第2アーム半体422が嵌合される際に、フック部426のテーパ面426aが乗り上げるテーパ面が形成されている。フック部426の基端から先端までの長さをフック部426の高さとしたときに、第1アーム半体421は、フック部426の高さ方向に、フック部426の高さ程度の弾性変形が可能な樹脂材料により形成されている。
In addition, a taper surface on which the
本実施形態におけるフック部426の高さは、ロック穴427を貫通する高さとされている。通常、ロック片とロック穴を用いた係止構造では、ロック片はロック穴を突き抜けない程度のサイズに設定される。ロック片がロック穴を貫通してしまうと、ロック片の先端がケース内の収容物などを損傷させるおそれがあるからである。本実施形態のロック穴427は、フック部426よりもモータ室43の内側に配置されている。また、モータ25の外周面25aはロック穴427が形成されたストッパ部422cの近傍まで迫っており、ロック穴427のモータ室43内側への変位は制限されている。この状況下で通常の高さのロック片を用いた場合、ロック片の先端がロック穴の縁に乗り上げ、ケース体をいくら嵌め合わせてもケース体がロックされないという不具合が生じることがある。本実施形態のフック部426は、あえてロック穴427を貫通する高さに設定されていることから、アームケース42aを嵌合する際の第1アーム半体421の変形量が大きくなり、フック部426がロック穴427に強力に押しつけられることとなる。さらに、本実施形態のフック部426はその基端よりも先端の厚みが薄くなるよう形状されているから、フック部426の先端は湾曲しやすくなっている。これにより、本実施形態のアームケース42aでは、ロック穴427(ストッパ部422c)のモータ室43内側への変位が制限されていながらも、フック部426がロック穴427に押し込まれやすくなっており、アームケース42aがロックされないという不具合を回避することが可能とされている。
The height of the
(減速歯車列)
図4は減速歯車列30の噛合構造を示す透過図である。図4において点線で示した歯部は、各歯車部材の図視背面側の歯車部を表したものである。
(Reduction gear train)
FIG. 4 is a transparent view showing the meshing structure of the
ピニオンカバー部521の窓部521aから露出したピニオンギヤ21の歯部は、減速歯車列30を構成する第1減速歯車31の大径歯車部と噛合している。以降、第1減速歯車31の小径歯車部は第2減速歯車32の大径歯車部に、第2減速歯車32の小径歯車部は第3減速歯車33の大径歯車部に、第3減速歯車33の小径歯車部は第4減速歯車34の大径歯車部に、第4減速歯車34の小径歯車部は第5減速歯車35の大径歯車部に順次噛合している。そして、第5減速歯車35の小径歯車部は駆動リンク411の歯車部411cと噛合している。これにより第1モータ20の回転は減速されて駆動リンク411へと伝達される。
The tooth portion of the
(トルクリミッタ機構)
減速歯車列30の歯車部材のうち、第1減速歯車31は、所定の閾値を超えるトルクが印加されたときに、空転によりその超過トルクを消費することで伝達トルクを抑制する、トルクリミッタ機構(過負荷保護機構)を備えた歯車部材である。上記所定の閾値トルクとしては、ルーバー装置10の通常動作時において実際に第1減速歯車31に伝達されうるトルクの上限値に適宜余裕値を加算し、異常の蓋然性が高いと判断可能なトルクを設定すればよい。
(Torque limiter mechanism)
Of the gear members of the
図5は第1減速歯車31の外観斜視図(図5(a))および、図5(a)に示される第1減速歯車31のA−A方向断面図(図5(b))である。以下、第1減速歯車31およびトルクリミッタ機構に関する説明において、「上」および「下」とは、図5(a)(b)における上下をいい、また「平面視」とは、第1減速歯車31の上方から第1減速歯車31を下方に見下ろす視線方向をいう。
FIG. 5 is an external perspective view of the first reduction gear 31 (FIG. 5A) and a cross-sectional view in the AA direction of the
第1減速歯車31は、別部材からなる上側の小径歯車部311と下側の大径歯車部312とにより構成されている。小径歯車部311および大径歯車部312は、共通の軸部314により支持され、互いに独立して回転可能である。小径歯車部311と大径歯車部312との間には、コイルばね313が上下方向に圧縮された状態で配置されており、コイルばね313により小径歯車部311は上方に、大径歯車部312は下方に付勢されている。
The
小径歯車部311は、コイルばね313がその下面に当接することにより上方へ付勢されるとともに、軸部314の上端近傍部から径方向外側に延出した鉤部314aにより上方への移動が係止されている。また、図5(a)に示すように、鉤部314aが配置される小径歯車部311上端の開口部311aは、平面視十字形に形成されている。これにより、鉤部314aおよび開口部311aは互いに周方向に係合し、小径歯車部311および軸部314は周方向に常に一体に回転することとなる。
The small-
大径歯車部312は、軸部314に圧入され、その上面および下面には円環形状の平板部材である金属板315が同軸状に配置されている。大径歯車部312は、コイルばね313が大径歯車部312の上面側に配置された金属板315に当接することにより、かかる金属板315を介して下方へと付勢される。また、大径歯車部312の下面側に配置された金属板315は、軸部314の下端近傍部に形成された拡径部314bの上面に載置されており、かかる金属板315および拡径部314bにより大径歯車部312の下方への移動が係止されている。そのため、大径歯車部312は、コイルばね313の付勢力により拡径部314bに押し付けられることとなる。その結果、大径歯車部312は、軸部314への圧入による摩擦抵抗、および、コイルばね313で拡径部314bに押し付けられることによる摩擦抵抗により、軸部314と周方向に連れ回って回転する。
The large-
第1減速歯車31は上記構成を備えることにより、軸部314と大径歯車部312とがその摩擦抵抗で連れ回り可能なトルクの範囲内では、小径歯車部311(および軸部314)と大径歯車部312は周方向に一体に回転し、上記摩擦抵抗を超えるトルクが加えられたときには、小径歯車部311(および軸部314)と大径歯車部312のいずれか一方が空転する。
Since the
減速歯車列30が、トルクリミッタ機構を備えた第1減速歯車31を有することにより、例えば第1モータ20のホールド中に、風向板91がユーザーにより手動で開閉され、減速歯車列30やリンク機構40など第1モータ20の動力伝達部材に予期しない外力が加えられたときでも、第1モータ20の脱調や動力伝達部材の破損を防止することが可能とされている。また、例えば第1モータ20のイニシャライズ動作において、第1モータ20の認識角度と駆動リンク411の実際の配置角度とを同期させるため、第1モータ20を駆動リンク411の初期位置方向へ意図的に数ステップ脱調させる場合でも、動力伝達部材の損傷や異常音を低減することが可能とされている。
Since the
また、図4に示すように、第1減速歯車31は第1モータ20のピニオンギヤ21に噛合している。本発明のトルクリミッタ機構は、当然、通常動作時の伝達トルクよりも大きなトルクが印加されたときに作動する。従って、通常動作時における伝達トルクが大きな歯車部材(例えば第5減速歯車35)にトルクリミッタ機構をもたせると、それ以上の外力(トルク)が加えられたときにしか保護効果は得られない。減速歯車列30のうち、伝達トルクが最も小さな第1減速歯車31にトルクリミッタ機構をもたせることにより、異常に対して機敏にトルクリミッタ機構を作動させることが可能とされている。
Further, as shown in FIG. 4, the
(アームの往復動作)
図6はリンク機構40によるアーム42の往復動作を示す説明図である。図6(a)はアーム42が収納方向Bに限界まで移動した状態、図6(b)はアーム42が延出方向Aに限界まで移動した状態を示している。
(Reciprocating movement of arm)
FIG. 6 is an explanatory diagram showing the reciprocating operation of the
図2および図6に示すように、リンク機構40は、二つのリンク部材41(駆動リンク411および従動リンク412)と、これらリンク部材41に支持されて延出方向Aおよび収納方向Bへ往復移動するアーム42と、を有している。アーム42の延出方向A側の端部には、風向板91を回動させる駆動源である第2モータ25が配置されている。
As shown in FIGS. 2 and 6, the
駆動リンク411は、幅方向Xに貫通する円形の貫通孔411aがその先端部に形成されている。かかる貫通孔411aにアーム42の支軸421aが挿通されることで、駆動リンク411の先端部とアーム42とが互いに回転可能に連結されている。また、上でも述べたように、駆動リンク411の基端部は、基端部に形成された貫通孔411bに第2ケース半体52の支軸522が挿通されることでケース50に回転可能に支持されている。また、駆動リンク411の基端部に形成された歯車部411cは、減速歯車列30の第5減速歯車35と噛合している。
The
従動リンク412は、駆動リンク411よりも延出方向A側に配置されている。従動リンク412の先端部には、幅方向Xに貫通された円形の貫通孔412aが形成されており、貫通孔412aにアーム42の支軸421bが挿通されることで、従動リンク412の先端部とアーム42とが互いに回転可能に連結されている。また、上でも述べたように、従動リンク412の基端部は、軸体412bが第1ケース半体51および第2ケース半体52の軸受513,523に嵌合されることによりケース50に回転可能に支持されている。
The driven
本実施形態においては、第1モータ20がCW方向へ回転すると、駆動リンク411もCW方向へ回動し、アーム42は延出方向Aへと移動する、CCW方向へ回転すると、アーム42もCCW方向へ回動し、アーム42は収納方向Bへと移動する。
In the present embodiment, when the
風向板91を開閉するアーム42をリンク機構40で往復移動させることにより、風向板91とアーム42の荷重を各リンク部材41(駆動リンク411および従動リンク412)に分散させることができる。これにより荷重を支持する応力が一部のみに集中することを防ぐことができ、装置全体の小型化が図られている。また、リンク機構40の摺動部はほぼその関節部のみであることから、アーム42の往復動作に伴う摺動抵抗は比較的小さなものとなる。
By reciprocating the
また、本実施形態の第1モータ20にはステッピングモータが用いられている。ステッピングモータは正逆両方向に回転可能であり、また、ステップ数によりその回転角度を算出することができる。よって、駆動リンク411のその時々における配置角度を検出するために別途ロータリエンコーダなどによるフィードバック制御を行う必要がない。これにより、装置全体における部品点数の削減および装置の小型化が図られている。この点は第2モータ25についても同様である。尚、本発明の第1駆動源は必ずしもステッピングモータである必要はなく、正逆両方向に回転可能なモータであれば他のモータを使用することもできる。但しその場合、上でも述べたように、別途フィードバック制御などの位置検出手段が必要になることがある。
A stepping motor is used as the
また、第1ケース半体51と中板53におけるリンク機構40側の面には、リンク部材41を幅方向X(各リンク部材の間接部の軸方向)から支持するリブ511(図7参照)とリブ531(図6参照)が形成されている。リブ511およびリブ531は各リンク部材41の回動軌跡に沿ってリンク機構40側に突出した線状に延びるリブであり、各リンク部材41はリブ511およびリブ531に摺動可能に接触している。
A
線状のリブで各リンク部材41を支持することにより、リンク機構40の幅方向Xのガタつきが防止されるとともに、各リンク部材41との摺動抵抗が低減されている。
By supporting each
(揺動規制部)
ルーバー装置10には、リンク機構40が所定位置まで揺動したときに、互いに当接することでリンク機構40の揺動可能範囲を規制する一対の係止部である揺動規制部が設けられている。尚、本実施形態では第1揺動規制部60および第2揺動規制部65の二種類の揺動規制部が設けられている。
(Rotation restriction part)
The
図7は第1揺動規制部60の構造を示す説明図である。図7(a)はアーム42が収納方向Bに限界まで移動した状態、図7(b)はアーム42が延出方向Aに限界まで移動した状態を示している。尚、図7の第1ケース半体51は破線により透過表示されている。
FIG. 7 is an explanatory view showing the structure of the first
第1揺動規制部60は、駆動リンク411に形成された突起部61と、第1ケース半体51に形成された当たり部62とからなる。突起部61は、駆動リンク411から幅方向X(駆動リンクの間接部の軸方向)に沿って第1ケース半体51側に突出した略角筒状の係合片である。当たり部62は、リンク機構40が所定位置まで揺動したときに突起部61と当接する位置に形成されたリブ状の係合片である。当たり部62の形成位置は、リンク機構40の所望の揺動範囲に応じて適宜定めることができる。
The first rocking|
リンク機構40が所定位置まで揺動したときに、駆動リンク411に形成された突起部61と、第1ケース半体51に形成された当たり部62とを当接させる構成とすることにより、リンク機構40の揺動可能範囲を所望の範囲に制限することができる。また、アーム42を延出方向A側に限界まで移動させたとき(つまり突起部61と当たり部62とが当接する位置まで移動させたとき)には、突起部61と当たり部62とを介して駆動リンク411が第1ケース半体51に支えられることにより、アーム42と風向板91の荷重をさらに分散させることが可能となる。
When the
第2揺動規制部65は、リンク機構40の内側に向かって略L字形状に屈曲した従動リンク412の屈曲部66と、アーム42のアーム側当接部67との対向面66a,67aからなる(図6参照)。屈曲部66は、アーム42が延出方向Aにおける所定位置まで延出したときに、これら対向面66a,67aが当接する角度に屈曲している。屈曲部66の屈曲角度は、アーム42の所望の延出範囲に応じて適宜定めることができる。
The second rocking|
図6(b)には延出方向Aへ移動したアーム42が示されている。図6(b)のアーム42は第1揺動規制部60によりその延出範囲が制限されており、第2揺動規制部65は作用していない。しかし、アーム42にさらに大きな荷重がかかり、アーム42が下方にたわんだ場合には、これら対向面66a,67aが当接することによりアーム42の移動が制限される。このように、従動リンク412がアーム42をその連結部のみならずこれら対向面66a,67aでも支えることにより、アーム42と風向板91の荷重をさらに分散させることが可能とされている。
FIG. 6B shows the
尚、本実施形態においては上記二種類の揺動規制部が設けられているが、これら揺動規制部はいずれか一方のみであっても良い。 In addition, in the present embodiment, the two types of rocking restricting portions are provided, but only one of these rocking restricting portions may be provided.
(サポートユニット)
図9はサポートユニット70の内部構造を示す分解斜視図である。図10はサポートユニット70によるアーム72の往復動作を示す説明図である。サポートユニット70は駆動源を備えず、ルーバー装置10,10´の動作に追従して風向板91を支持する補助的なユニットである。
(Support unit)
FIG. 9 is an exploded perspective view showing the internal structure of the
サポートユニット70は幅方向Xに分解可能な第1ケース半体711および第2ケース半体712からなるケース71を有している。ケース71にはアーム72および従動リンク73が揺動可能に支持されている。
The
従動リンク73の構成および支持構造はルーバー装置10の従動リンク412と同様である。アーム72には、ルーバー装置10の第2モータ25に相当する駆動源は配置されておらず、その延出方向A側の端部に設けられた風向板接続部721に風向板91が回動可能に結合されるのみである。
The structure and support structure of the driven
アーム72の基端部には幅方向Xに沿って第2ケース半体712側に突出したピン751が形成されている。ピン751は第2ケース半体712に設けられた曲線状のカム溝752に沿って摺動するカムフォロアである。カム溝752の曲線形状は、ルーバー装置10のリンク機構40の揺動軌跡と同じ形状とされている。これによりサポートユニット70のアーム72は、ルーバー装置10,10´のアーム42と同軌跡上を往復移動可能とされている。
A
サポートユニット70の幅方向Xの幅はルーバー装置10,10´よりも小さく、空調機の風路を妨げない構成とされている。本実施形態においては、サポートユニット70が用いられていることにより、風向板91がその自重や風圧によりたわむことが防止されている。
The width of the
(他の実施形態)
以下に、本発明の他の実施形態にかかるルーバー装置11について図面を用いて説明する。なお、以下の説明では、先の実施形態と同様または同一の機能を有する構成については、先の実施形態と同一の符号を付してその詳細な説明を省略する。
(Other embodiments)
A louver device 11 according to another embodiment of the present invention will be described below with reference to the drawings. In the following description, configurations having the same or the same functions as those in the previous embodiment will be denoted by the same reference numerals as those in the previous embodiment, and detailed description thereof will be omitted.
図11はルーバー装置11におけるアーム42の往復動作を示す説明図である。図11(a)はアーム42が収納方向Bに限界まで移動した状態、図11(b)はアーム42が延出方向Aに限界まで移動した状態を示している。
FIG. 11 is an explanatory diagram showing the reciprocating operation of the
ルーバー装置11には、コイルばねである制動ばね95によりアーム42を制動する制動機構が設けられている。本実施形態における制動ばね95は、駆動リンク411と従動リンク412とに接続され、アーム42が延出方向Aに移動したときに、その弾性力により従動リンク412を収納方向B側に付勢することで、アーム42の延出方向Aへの移動を制動するものである。
The louver device 11 is provided with a braking mechanism that brakes the
アーム42を延出方向Aに移動させるときには、アーム42と風向板91の荷重によりアーム42は延出方向A側に付勢される。特に風向板91が大風量の風圧を受けているような場合には、その付勢力はさらに大きなものとなる。これにより風向板91の開閉動作の安定性が損なわれるおそれや、第1モータ20の動力伝達部材が損傷するおそれ、第1モータ20が脱調を生じるおそれがある。各リンク部材41を制動ばね95でつなぎ、アーム42の延出方向Aへの移動をその弾性力で制動することにより、このような不具合を未然に防ぐことが可能とされている。
When the
尚、制動ばね95の接続対象は駆動リンク411と従動リンク412とに限られず、ケース50とリンク機構40の一部とを連結しても同様の効果を得ることができる。
The target of connection of the
以上、本発明の実施の形態について説明したが、本発明は上記実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲で種々の改変が可能である。 Although the embodiments of the present invention have been described above, the present invention is not limited to the above embodiments, and various modifications can be made without departing from the scope of the present invention.
例えば、本実施形態におけるリンク機構40では、リンク機構によるアーム部材の往復移動を最小の部品点数で実現すべく四節リンク機構を採用しているが、リンク部材の数をさらに増やしてアーム部材のより複雑な動作を可能にしても良い。
For example, in the
10,10´ ルーバー装置
20 第1モータ(第1駆動源)
25 第2モータ(第2駆動源(モータ))
25a 外周面(モータの外面)
251 上面
251a 軸受部
252 支軸
27 スペーサー部材
271 平板部
272 側板部
271a 軸受固定穴
271b 支軸固定穴
273 回り止めスリーブ
40 リンク機構
41 リンク部材
411 駆動リンク
412 従動リンク
42 アーム(アーム部材,中間リンク)
42a アームケース(ケース体)
421 第1アーム半体(第1ケース部材)
422 第2アーム半体(第2ケース部材)
422c ストッパ部
424 回り止めピン
426 フック部(ロック片)
427 ロック穴
43 モータ室
43a 内周面(第1ケース部材の内面)
50 ケース(固定部)
91 風向板
A 延出方向
B 収納方向
10, 10'
25 Second motor (second drive source (motor))
25a Outer peripheral surface (outer surface of motor)
42a Arm case (case body)
421 1st arm half body (1st case member)
422 Second arm half body (second case member)
422c
50 cases (fixed part)
91 Wind direction plate A Extension direction B Storage direction
Claims (7)
前記第1ケース部材の内面には、該内面を基端としてその先端が該第1ケース部材の内側に突き出した突起部であるロック片が形成されており、
前記第2ケース部材には、前記ロック片に係合する貫通孔であるロック穴が形成されており、
前記第1ケース部材の前記第2ケース部材への嵌合方向における前記ロック片の厚みは、その基端側よりも先端側が薄くなるように形成されており、
前記ロック片の基端から先端までの長さは、前記第1ケース部材および前記第2ケース部材が嵌め合わされたときに、前記ロック穴を貫通する長さであり、
前記ケース体のケース内にモータとともに収容され、該ケース内における該モータの位置を固定するスペーサー部材をさらに備え、
前記モータの軸方向に沿う方向を前記ケース内における上下方向としたときに、
前記スペーサー部材は、前記モータの出力軸側の端面を押さえることで前記ケース内における該モータの上下方向の位置を固定し、
前記モータは、前記端面から前記出力軸の外周面に沿って円筒状に延びる軸受部を有するモータであり、
前記スペーサー部材には、前記モータの前記軸受部が圧入される貫通孔である軸受固定穴が形成されており、
前記ケース内における前記モータの外周面の周囲には、隙間が設けられ、
前記スペーサー部材は、前記ケース内におけるその周方向角度および径方向位置が固定されており、
前記モータは、前記端面から垂直に延びる棒状体である支軸を有するモータであり、
前記スペーサー部材には、前記モータの前記支軸が圧入される貫通孔である支軸固定穴が形成されており、
前記モータは、該モータの前記軸受部が前記スペーサー部材の前記軸受固定穴に、該モータの前記支軸が前記スペーサー部材の前記支軸固定穴にそれぞれ圧入されることにより、前記ケース内におけるその周方向角度および径方向位置が固定されることを特徴とするケース体。 A case body comprising a first case member and a second case member which are fitted to each other,
A lock piece is formed on the inner surface of the first case member, the locking piece being a projection having a tip end protruding toward the inside of the first case member with the inner surface as a base end.
The second case member is formed with a lock hole that is a through hole that engages with the lock piece,
The thickness of the lock piece in the fitting direction of the first case member to the second case member is formed so that the tip side is thinner than the base end side,
The length to the tip from the base end of the locking piece, when the first case member and the second case member is fitted, Ri length der penetrating through the lock hole,
A spacer member that is housed in the case of the case body together with the motor and that fixes the position of the motor in the case;
When the direction along the axial direction of the motor is the vertical direction in the case,
The spacer member fixes the vertical position of the motor in the case by pressing the end surface of the motor on the output shaft side,
The motor is a motor having a bearing portion extending in a cylindrical shape from the end surface along the outer peripheral surface of the output shaft,
The spacer member has a bearing fixing hole that is a through hole into which the bearing portion of the motor is press-fitted,
A gap is provided around the outer peripheral surface of the motor in the case,
The spacer member is fixed in its circumferential angle and radial position in the case,
The motor is a motor having a support shaft that is a rod-shaped body extending vertically from the end surface,
The spacer member has a support shaft fixing hole which is a through hole into which the support shaft of the motor is press-fitted,
In the motor, the bearing portion of the motor is press-fitted into the bearing fixing hole of the spacer member, and the supporting shaft of the motor is press-fitting into the supporting shaft fixing hole of the spacer member. A case body having a fixed circumferential angle and radial position .
前記第1ケース部材は、前記ロック片の高さ方向に、少なくとも該ロック片の高さ程度の弾性変形が可能な可撓性材料からなることを特徴とする請求項1に記載のケース体。 When the length from the base end to the tip of the lock piece is the height of the lock piece,
The case body according to claim 1, wherein the first case member is made of a flexible material that is elastically deformable in a height direction of the lock piece at least about a height of the lock piece.
前記第1駆動源の駆動力により揺動するリンク機構と、
前記リンク機構を収容可能な固定部と、を備え、
前記リンク機構は、請求項1から請求項3のいずれか一項の記載のケース体を有するアーム部材と、該アーム部材を支持し、該アーム部材を延出方向および収納方向へ往復移動させる複数のリンク部材を有しており、
前記複数のリンク部材は、前記第1駆動源により駆動される駆動リンクと、該駆動リンクの動作に前記アーム部材を介して追従する従動リンクと、を有しており、
前記駆動リンクは、その先端側が前記アーム部材に、基端側が前記第1駆動源に直接または他の部材を介して連結されており、
前記従動リンクは、その先端側が前記アーム部材に、基端側が前記固定部に連結されており、
前記アーム部材のその延出方向側の端部には、板状部材である風向板が回動可能に連結されていることを特徴とするルーバー装置。 A first drive source,
A link mechanism swinging by the driving force of the first driving source,
A fixed part capable of accommodating the link mechanism,
The link mechanism includes an arm member having the case body according to any one of claims 1 to 3 , and a plurality of arm members that support the arm member and reciprocate the arm member in an extending direction and a storing direction. It has a link member of
The plurality of link members include a drive link driven by the first drive source, and a driven link that follows the operation of the drive link via the arm member,
The drive link has a tip end side connected to the arm member and a base end side connected to the first drive source directly or via another member,
The driven link has a tip end side connected to the arm member and a base end side connected to the fixed portion,
A louver device in which a wind direction plate, which is a plate-like member, is rotatably connected to an end portion of the arm member on the extending direction side .
前記従動リンクは前記駆動リンクよりも前記アーム部材の延出方向側に配置されていることを特徴とする請求項4に記載のルーバー装置。 The link mechanism is a four-bar linkage using the arm member as an intermediate link,
The louver device according to claim 4, wherein the driven link is disposed on the extension direction side of the arm member with respect to the drive link.
前記風向板は前記第2駆動源の駆動力により所定の角度範囲内において回動可能であることを特徴とする請求項4または請求項5に記載のルーバー装置。 A second drive source, which is the motor, is arranged at an end of the arm member on the extending direction side ,
The louver device according to claim 4 or 5 , wherein the wind direction plate is rotatable within a predetermined angle range by a driving force of the second drive source.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016042048A JP6727857B2 (en) | 2016-03-04 | 2016-03-04 | Case body and louver device including the same |
| CN201780014331.2A CN108700098B (en) | 2016-03-04 | 2017-02-14 | Shell and air deflector device with same |
| PCT/JP2017/005343 WO2017150177A1 (en) | 2016-03-04 | 2017-02-14 | Case body and louver device provided with same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016042048A JP6727857B2 (en) | 2016-03-04 | 2016-03-04 | Case body and louver device including the same |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017155905A JP2017155905A (en) | 2017-09-07 |
| JP2017155905A5 JP2017155905A5 (en) | 2019-03-22 |
| JP6727857B2 true JP6727857B2 (en) | 2020-07-22 |
Family
ID=59742801
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016042048A Active JP6727857B2 (en) | 2016-03-04 | 2016-03-04 | Case body and louver device including the same |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP6727857B2 (en) |
| CN (1) | CN108700098B (en) |
| WO (1) | WO2017150177A1 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111615452B (en) * | 2018-02-02 | 2022-05-06 | 日本瑞翁株式会社 | Laminated film, method for producing same, and polarizing plate |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3468230B2 (en) * | 2001-06-27 | 2003-11-17 | 株式会社ノーリツ | Bathroom heater |
| JP2003239920A (en) * | 2002-02-19 | 2003-08-27 | Seiko Epson Corp | Snap-fit joining structure and molded product |
| JP5136122B2 (en) * | 2008-03-05 | 2013-02-06 | パナソニック株式会社 | Louver device |
| JP5950712B2 (en) * | 2012-06-20 | 2016-07-13 | 株式会社東海理化電機製作所 | Part connection structure |
| JP6068897B2 (en) * | 2012-09-21 | 2017-01-25 | 矢崎総業株式会社 | Locking structure |
| JP6116396B2 (en) * | 2013-06-19 | 2017-04-19 | 株式会社ニフコ | Fitting |
-
2016
- 2016-03-04 JP JP2016042048A patent/JP6727857B2/en active Active
-
2017
- 2017-02-14 CN CN201780014331.2A patent/CN108700098B/en active Active
- 2017-02-14 WO PCT/JP2017/005343 patent/WO2017150177A1/en active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| CN108700098B (en) | 2020-05-05 |
| CN108700098A (en) | 2018-10-23 |
| JP2017155905A (en) | 2017-09-07 |
| WO2017150177A1 (en) | 2017-09-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6698382B2 (en) | Louver device | |
| US20100060061A1 (en) | Power seat driving apparatus for vehicle | |
| JP5364107B2 (en) | Damper position adjustment device | |
| JP7072443B2 (en) | Linear drive | |
| KR101621599B1 (en) | Geared motor | |
| WO2018084312A1 (en) | Linear drive device, motor and linear drive device production method | |
| JP6391697B2 (en) | Linear drive, exhaust gas recirculation control valve | |
| JP2017507060A (en) | Actuators for automobiles, especially automobile seats | |
| WO2018055749A1 (en) | Louver device | |
| KR101581087B1 (en) | Geared motor | |
| JP4440930B2 (en) | Door opening and closing device | |
| KR101523432B1 (en) | Geared motor | |
| KR101568470B1 (en) | Geared motor | |
| JP6609150B2 (en) | Louver device | |
| JP6727857B2 (en) | Case body and louver device including the same | |
| JP2016216973A (en) | Resistance generating device | |
| KR101616165B1 (en) | Geared motor | |
| JP7267735B2 (en) | drive | |
| US8567277B2 (en) | Transmission device | |
| WO2017057229A1 (en) | Louver device | |
| KR102468179B1 (en) | Door edge protector device | |
| JP6816491B2 (en) | Vehicle window glass lifting device, moving body drive device, and sunroof device | |
| CN106089003B (en) | Speed adjusting device of sunlight shielding device | |
| US20240111118A1 (en) | Lens shift backlash elimination device | |
| JP6219218B2 (en) | Power transmission device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160310 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20160311 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190207 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190207 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191217 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200114 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200609 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200701 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6727857 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |