JP6721707B2 - 血流速度の測定を改善するための方法及び装置 - Google Patents
血流速度の測定を改善するための方法及び装置 Download PDFInfo
- Publication number
- JP6721707B2 JP6721707B2 JP2018549346A JP2018549346A JP6721707B2 JP 6721707 B2 JP6721707 B2 JP 6721707B2 JP 2018549346 A JP2018549346 A JP 2018549346A JP 2018549346 A JP2018549346 A JP 2018549346A JP 6721707 B2 JP6721707 B2 JP 6721707B2
- Authority
- JP
- Japan
- Prior art keywords
- ultrasonic transducer
- velocity profile
- spatiotemporal
- subject
- correction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 40
- 238000005259 measurement Methods 0.000 title claims description 35
- 230000017531 blood circulation Effects 0.000 title claims description 27
- 238000012937 correction Methods 0.000 claims description 68
- 238000002604 ultrasonography Methods 0.000 claims description 42
- 210000004204 blood vessel Anatomy 0.000 claims description 9
- 238000004590 computer program Methods 0.000 claims description 4
- 210000000709 aorta Anatomy 0.000 description 35
- 230000000747 cardiac effect Effects 0.000 description 13
- 210000001367 artery Anatomy 0.000 description 12
- 230000008901 benefit Effects 0.000 description 12
- 230000000007 visual effect Effects 0.000 description 9
- 210000004369 blood Anatomy 0.000 description 7
- 239000008280 blood Substances 0.000 description 7
- 239000000523 sample Substances 0.000 description 7
- 210000001147 pulmonary artery Anatomy 0.000 description 5
- 229920001746 electroactive polymer Polymers 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 229910001285 shape-memory alloy Inorganic materials 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 210000005240 left ventricle Anatomy 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 239000012781 shape memory material Substances 0.000 description 2
- 238000013519 translation Methods 0.000 description 2
- 210000001015 abdomen Anatomy 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 239000012491 analyte Substances 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000001010 compromised effect Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000005684 electric field Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 210000004072 lung Anatomy 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 210000005241 right ventricle Anatomy 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images





Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/488—Diagnostic techniques involving Doppler signals
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/06—Measuring blood flow
- A61B8/065—Measuring blood flow to determine blood output from the heart
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/42—Details of probe positioning or probe attachment to the patient
- A61B8/4245—Details of probe positioning or probe attachment to the patient involving determining the position of the probe, e.g. with respect to an external reference frame or to the patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/52—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/5215—Devices using data or image processing specially adapted for diagnosis using ultrasonic, sonic or infrasonic waves involving processing of medical diagnostic data
-
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H50/00—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics
- G16H50/20—ICT specially adapted for medical diagnosis, medical simulation or medical data mining; ICT specially adapted for detecting, monitoring or modelling epidemics or pandemics for computer-aided diagnosis, e.g. based on medical expert systems
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Medical Informatics (AREA)
- Public Health (AREA)
- General Health & Medical Sciences (AREA)
- Pathology (AREA)
- Physics & Mathematics (AREA)
- Veterinary Medicine (AREA)
- Animal Behavior & Ethology (AREA)
- Surgery (AREA)
- Molecular Biology (AREA)
- Heart & Thoracic Surgery (AREA)
- Biophysics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Cardiology (AREA)
- Hematology (AREA)
- Data Mining & Analysis (AREA)
- Databases & Information Systems (AREA)
- Primary Health Care (AREA)
- Epidemiology (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
Description
Claims (14)
- 被検体の血管内の血流速度の測定を改善する方法であって:
超音波ビームを放出し、前記被検体の身体部分のうちの複数の深度における流速を測定するために、超音波トランスデューサを利用するステップ;
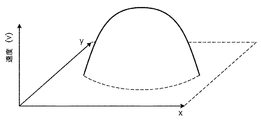
制御ユニットが、前記複数の深度の各々について測定された流速から、前記身体部分に関する各自の時空間速度プロファイルを形成するステップであって、各々の時空間速度プロファイルは各自の深度で測定された流速から形成される、ステップ;及び
制御ユニットが、前記超音波トランスデューサの位置を調整するために前記被検体の血管軸に対する前記超音波ビームの角度の補正を決定するために、複数の時空間速度プロファイルのうちの1つ以上を分析するステップであって、前記補正は、前記時空間速度プロファイルにおけるピークの位置と、前記超音波ビームの軸の前記時空間速度プロファイルとの交点に対応する前記時空間速度プロファイルの中心との間の差分に基づいている、ステップ;
を有する方法。 - 前記角度に対して決定された補正に基づいて、前記超音波トランスデューサのオペレータにフィードバックを提供するステップ;
を更に有する請求項1に記載の方法。 - 前記角度に対する決定された補正に基づいて、前記超音波トランスデューサに対する第1制御信号を決定するステップ;及び
前記時空間速度プロファイルにおけるピークの位置が前記時空間速度プロファイルの中心又はその近辺にあるように、前記超音波トランスデューサにより放出される前記超音波ビームの方向を、決定された前記第1制御信号に従って調整するステップ;
を更に有する請求項1又は2に記載の方法。 - 前記角度に対する決定された補正に基づいて、前記超音波トランスデューサのオリエンテーション・アクチュエータに対する第2制御信号を決定するステップであって、前記オリエンテーション・アクチュエータは、前記被検体に対する前記超音波トランスデューサの方向を調整することが可能である、ステップ;
を更に有する請求項1、2又は3に記載の方法。 - 前記角度に対する決定された補正に基づいて、前記時空間速度プロファイルにおける流速値に対する補正を決定するステップ;
を更に有する請求項1ないし4のうち何れか一項に記載の方法。 - 前記被検体に対する、前記超音波トランスデューサの位置に対する補正を決定するために、前記時空間速度プロファイルを分析するステップ;
を更に有する請求項1ないし5のうちの何れか一項に記載の方法。 - 前記位置に対する決定された補正に基づいて、前記超音波トランスデューサのポジション・アクチュエータに対する第3制御信号を決定するステップであって、前記ポジション・アクチュエータは、前記被検体に対する前記超音波トランスデューサの位置を調整することが可能である、ステップ;
を更に有する請求項6に記載の方法。 - コンピュータ読み取り可能な媒体に記憶され、コンピュータ読み取り可能なコードを有するコンピュータ・プログラムであって、前記コンピュータ読み取り可能なコードは、コンピュータ又はプロセッサにより実行されると、請求項1ないし7のうちの何れか一項に記載の方法を前記コンピュータ又はプロセッサに実行させる、コンピュータ・プログラム。
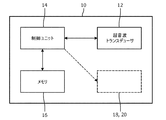
- 超音波ビームを放出する超音波トランスデューサから信号を受信する入力部と、制御ユニットを有し、被検体の血管内の血流速度を測定する装置であって、前記制御ユニットは:
前記被検体の身体部分のうちの異なる深度における流速の測定値を取得するステップであって、前記測定は、前記超音波トランスデューサを利用して実行される、ステップ;
複数の深度の各々について測定された流速から、前記身体部分に関する各自の時空間速度プロファイルを形成するステップであって、各々の時空間速度プロファイルは各自の深度で測定された流速から形成される、ステップ;及び
前記超音波トランスデューサの位置を調整するために前記被検体の血管軸に対する前記超音波ビームの角度の補正を決定するために、複数の時空間速度プロファイルのうちの1つ以上を分析するステップであって、前記補正は、前記時空間速度プロファイルにおけるピークの位置と、前記超音波ビームの軸の前記時空間速度プロファイルとの交点に対応する前記時空間速度プロファイルの中心との間の差分に基づいている、ステップ;
を行うように構成されている、装置。 - 前記制御ユニットは:
前記角度に対する決定された補正に基づいて、前記超音波トランスデューサに対する第1制御信号を決定するステップ;及び
前記時空間速度プロファイルにおけるピークの位置が前記時空間速度プロファイルの中心又はその近辺にあるように、前記超音波トランスデューサにより放出される前記超音波ビームの方向を調整するために前記第1制御信号を出力するステップ;
を行うように更に構成されている、請求項9に記載の装置。 - 前記制御ユニットは:
前記角度に対する決定された補正に基づいて、前記超音波トランスデューサのオリエンテーション・アクチュエータに対する第2制御信号を決定するステップであって、前記オリエンテーション・アクチュエータは、前記被検体に対する前記超音波トランスデューサの方向を調整することが可能である、ステップ;
を行うように更に構成されている、請求項9又は10に記載の装置。 - 前記制御ユニットは:
前記被検体に対する、前記超音波トランスデューサの位置に対する補正を決定するために、前記時空間速度プロファイルを分析する;
ように更に構成される、請求項9ないし11のうちの何れか一項に記載の装置。 - 前記制御ユニットは:
前記位置に対する決定された補正に基づいて、前記超音波トランスデューサのポジション・アクチュエータに対する第3制御信号を決定するステップであって、前記ポジション・アクチュエータは、前記被検体に対する前記超音波トランスデューサの位置を調整することが可能である、ステップ;
を行うように更に構成される、請求項12に記載の装置。 - 前記超音波トランスデューサを更に有する請求項9ないし13のうち何れか一項に記載の装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP16162037.2 | 2016-03-23 | ||
| EP16162037 | 2016-03-23 | ||
| PCT/EP2017/056951 WO2017162802A2 (en) | 2016-03-23 | 2017-03-23 | A method and apparatus for improving the measurement of flow velocity of blood |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019509827A JP2019509827A (ja) | 2019-04-11 |
| JP2019509827A5 JP2019509827A5 (ja) | 2020-04-16 |
| JP6721707B2 true JP6721707B2 (ja) | 2020-07-15 |
Family
ID=55589764
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018549346A Active JP6721707B2 (ja) | 2016-03-23 | 2017-03-23 | 血流速度の測定を改善するための方法及び装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11020093B2 (ja) |
| EP (1) | EP3432801B1 (ja) |
| JP (1) | JP6721707B2 (ja) |
| CN (1) | CN109640827B (ja) |
| WO (1) | WO2017162802A2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3669787A1 (en) * | 2018-12-19 | 2020-06-24 | Koninklijke Philips N.V. | Ultrasound transducer unit with friction guiding function |
| CN110988853B (zh) * | 2019-12-23 | 2023-08-01 | 中煤科工集团重庆研究院有限公司 | 基于有效峰值的超声波到达时间计算方法 |
| WO2022055920A1 (en) * | 2020-09-09 | 2022-03-17 | Edwards Lifesciences Corporation | Apparatus and method for tracking blood vessel cross-section |
| CN113558659B (zh) * | 2021-07-30 | 2023-07-04 | 重庆安酷科技有限公司 | 一种高精度超声波肺功能检测仪及其检测方法 |
| EP4382052A1 (en) * | 2022-12-08 | 2024-06-12 | Koninklijke Philips N.V. | Determining a flow profile in an artery based on ultrasound imaging data |
Family Cites Families (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4509526A (en) | 1983-02-08 | 1985-04-09 | Lawrence Medical Systems, Inc. | Method and system for non-invasive ultrasound Doppler cardiac output measurement |
| US4796634A (en) | 1985-08-09 | 1989-01-10 | Lawrence Medical Systems, Inc. | Methods and apparatus for monitoring cardiac output |
| US5052395A (en) | 1987-11-16 | 1991-10-01 | Waters Instruments, Inc. | Non-invasive ultrasonic pulse doppler cardiac output monitor |
| GB9112854D0 (en) | 1991-06-14 | 1991-07-31 | Skidmore Robert | Flowmeters |
| US5409010A (en) | 1992-05-19 | 1995-04-25 | Board Of Regents Of The University Of Washington | Vector doppler medical devices for blood velocity studies |
| GB9215231D0 (en) | 1992-07-17 | 1992-09-02 | Skidmore Robert | Flowmeters |
| CN1287740C (zh) * | 1995-08-08 | 2006-12-06 | 通用电器横河医疗系统株式会社 | 测定组织或血液的运动速度的方法和超声波诊断装置 |
| US6261233B1 (en) | 1996-01-05 | 2001-07-17 | Sunlight Medical Ltd. | Method and device for a blood velocity determination |
| AUPP431898A0 (en) | 1998-06-24 | 1998-07-16 | Northern Cardiac Sonography Pty Ltd | Ultrasonic cardiac output monitor |
| US5928153A (en) * | 1998-11-24 | 1999-07-27 | Hui-Hua Chiang | Ultrasound flow velocity and Doppler angle measurement method and system |
| JP4311904B2 (ja) * | 2000-05-08 | 2009-08-12 | ブレインスゲート リミテッド | 血液脳関門及び脳血流の性質を改善するための翼口蓋神経節の刺激方法及び装置 |
| JP4217023B2 (ja) * | 2002-02-25 | 2009-01-28 | 一郎 佐久間 | 血管内皮計測装置 |
| AUPS335302A0 (en) | 2002-07-03 | 2002-07-25 | Uscom Pty Ltd | Intergrated pressure and volume measurement method and apparatus |
| AUPS335402A0 (en) | 2002-07-03 | 2002-07-25 | Uscom Pty Ltd | Low profile chest affixed cw transducer |
| AU2002950611A0 (en) | 2002-08-06 | 2002-09-12 | Uscom Pty Ltd | Blood flow analysis system |
| AU2003900261A0 (en) | 2003-01-22 | 2003-02-06 | Uscom Pty Ltd | Method and system for the determination of blood characteristics |
| AU2003900260A0 (en) | 2003-01-22 | 2003-02-06 | Uscom Pty Ltd | Ultrasonic transducer device |
| AU2003901366A0 (en) | 2003-03-25 | 2003-04-10 | Uscom Pty Ltd | Method for tracing geometric elements |
| US7235053B2 (en) | 2004-01-20 | 2007-06-26 | Uscom Limited | Method and apparatus for determining blood flow characteristics in small infants |
| EP1804656A4 (en) | 2004-08-30 | 2009-05-13 | Uscom Ltd | METHOD AND APPARATUS FOR DEFINING TIME HEART INTERVALS |
| EP1865836A4 (en) | 2005-03-15 | 2009-09-09 | Uscom Ltd | AUTOMATIC FLOW MONITORING SYSTEM AND METHOD |
| US7591787B2 (en) * | 2005-09-15 | 2009-09-22 | Piero Tortoli | Method for removing Doppler angle ambiguity |
| WO2007134394A1 (en) | 2006-05-22 | 2007-11-29 | Uscom Limited | Cardiac measurement system and method |
| JP5231768B2 (ja) * | 2006-08-28 | 2013-07-10 | 株式会社東芝 | 超音波診断装置および超音波診断装置のデータ処理プログラム |
| US20090292208A1 (en) * | 2008-03-03 | 2009-11-26 | Jeffrey Jr R Brooke | Automated detection of asymptomatic carotid stenosis |
| JP5276465B2 (ja) * | 2009-02-16 | 2013-08-28 | 日立アロカメディカル株式会社 | 超音波診断装置及び医療システム |
| WO2010120907A2 (en) | 2009-04-14 | 2010-10-21 | Maui Imaging, Inc. | Multiple aperture ultrasound array alignment fixture |
| CN101884526B (zh) * | 2009-05-13 | 2012-12-26 | 深圳先进技术研究院 | 基于超声血流信息的动脉血压测量装置 |
| ITGE20090070A1 (it) * | 2009-08-31 | 2011-03-01 | Esaote Spa | Metodo e dispositivo per il rilevamento e la visualizzazione di informazioni emodinamiche in particolare del flusso ematico nelle vene, mediante ultrasoni |
| KR20120090170A (ko) * | 2011-02-07 | 2012-08-17 | 삼성전자주식회사 | 초음파 측정장치 및 그 제어방법 |
| CN103415246B (zh) * | 2011-03-01 | 2015-11-25 | 皇家飞利浦有限公司 | 用于针对血流测量定位多普勒超声换能器的方法和设备以及用于血流测量的系统 |
| RU2623301C2 (ru) * | 2011-06-30 | 2017-06-23 | Конинклейке Филипс Н.В. | Способ и устройство для автоматизированной доплеровской оценки угла и скорости потока |
| WO2013170053A1 (en) * | 2012-05-09 | 2013-11-14 | The Regents Of The University Of Michigan | Linear magnetic drive transducer for ultrasound imaging |
| JP6081301B2 (ja) * | 2012-06-27 | 2017-02-15 | 東芝メディカルシステムズ株式会社 | 超音波診断装置及び画像データの補正方法 |
| US10368844B2 (en) * | 2012-09-27 | 2019-08-06 | Koninklijke Philips N.V. | Automated biplane-PW workflow for ultrasonic stenosis assessment |
| US10405805B2 (en) | 2013-01-14 | 2019-09-10 | Uscom Limited | Combined blood flow and pressure monitoring system and method |
| US9247927B2 (en) | 2013-03-15 | 2016-02-02 | B-K Medical Aps | Doppler ultrasound imaging |
| KR20150031091A (ko) * | 2013-09-13 | 2015-03-23 | 삼성메디슨 주식회사 | 가이드 라인을 이용한 초음파 정보 제공 방법 및 장치 |
-
2017
- 2017-03-23 JP JP2018549346A patent/JP6721707B2/ja active Active
- 2017-03-23 EP EP17711690.2A patent/EP3432801B1/en active Active
- 2017-03-23 CN CN201780019035.1A patent/CN109640827B/zh active Active
- 2017-03-23 US US16/082,305 patent/US11020093B2/en active Active
- 2017-03-23 WO PCT/EP2017/056951 patent/WO2017162802A2/en active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019509827A (ja) | 2019-04-11 |
| EP3432801B1 (en) | 2020-05-06 |
| EP3432801A2 (en) | 2019-01-30 |
| WO2017162802A3 (en) | 2019-01-03 |
| US20190090852A1 (en) | 2019-03-28 |
| WO2017162802A2 (en) | 2017-09-28 |
| CN109640827A (zh) | 2019-04-16 |
| US11020093B2 (en) | 2021-06-01 |
| CN109640827B (zh) | 2022-04-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6721707B2 (ja) | 血流速度の測定を改善するための方法及び装置 | |
| CN109788940B (zh) | 跟踪介入设备的特征 | |
| CN108024790B (zh) | 用于对对象进行医学检查的超声装置和方法 | |
| EP3478209B1 (en) | Intertial device tracking system and method of operation thereof | |
| JP7252130B2 (ja) | 血管内流量及び圧力の測定 | |
| JP2021118891A (ja) | 介入デバイス認識 | |
| CN103385703A (zh) | 心输出量监视装置和心输出量测定方法 | |
| JP2020537569A5 (ja) | ||
| CN111511288A (zh) | 超声肺评估 | |
| JP2019509827A5 (ja) | ||
| EP3307171B1 (en) | Ultrasound imaging apparatus | |
| WO2020030746A1 (en) | Interventional device positioning using ultrasound signals | |
| US11241172B2 (en) | Ultrasonic diagnostic apparatus and method of controlling the same | |
| CN109561880B (zh) | 用于确定心输出量的系统 | |
| CN112533542B (zh) | 使用超声信号进行介入设备定位 | |
| EP4262567B1 (en) | System and method for determining position information | |
| CN112566556B (zh) | 相对于超声图像平面跟踪介入设备 | |
| KR101619802B1 (ko) | 심장 좌심실의 3차원 영상 생성 방법 및 그 장치 | |
| EP4026499A1 (en) | System and method for determining position information | |
| EP3773231B1 (en) | Ultrasound imaging system and method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180926 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200302 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200302 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20200302 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20200402 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200407 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200609 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200618 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6721707 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |