JP6714093B2 - 注入終了指示デバイスを備えた自動送達デバイス - Google Patents
注入終了指示デバイスを備えた自動送達デバイス Download PDFInfo
- Publication number
- JP6714093B2 JP6714093B2 JP2018545299A JP2018545299A JP6714093B2 JP 6714093 B2 JP6714093 B2 JP 6714093B2 JP 2018545299 A JP2018545299 A JP 2018545299A JP 2018545299 A JP2018545299 A JP 2018545299A JP 6714093 B2 JP6714093 B2 JP 6714093B2
- Authority
- JP
- Japan
- Prior art keywords
- plunger rod
- drive mechanism
- proximal
- rotor
- delivery device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001802 infusion Methods 0.000 title claims description 27
- 230000007246 mechanism Effects 0.000 claims description 52
- 238000002347 injection Methods 0.000 claims description 41
- 239000007924 injection Substances 0.000 claims description 41
- 238000012377 drug delivery Methods 0.000 claims description 26
- 230000000007 visual effect Effects 0.000 claims description 13
- ZZUFCTLCJUWOSV-UHFFFAOYSA-N furosemide Chemical compound C1=C(Cl)C(S(=O)(=O)N)=CC(C(O)=O)=C1NCC1=CC=CO1 ZZUFCTLCJUWOSV-UHFFFAOYSA-N 0.000 claims description 12
- 239000003814 drug Substances 0.000 claims description 8
- 229940079593 drug Drugs 0.000 claims description 8
- 238000000034 method Methods 0.000 description 4
- 238000012790 confirmation Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 238000005452 bending Methods 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000004913 activation Effects 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 230000014759 maintenance of location Effects 0.000 description 1
Images






















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M5/315—Pistons; Piston-rods; Guiding, blocking or restricting the movement of the rod or piston; Appliances on the rod for facilitating dosing ; Dosing mechanisms
- A61M5/31565—Administration mechanisms, i.e. constructional features, modes of administering a dose
- A61M5/31566—Means improving security or handling thereof
- A61M5/3157—Means providing feedback signals when administration is completed
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/20—Automatic syringes, e.g. with automatically actuated piston rod, with automatic needle injection, filling automatically
- A61M5/2033—Spring-loaded one-shot injectors with or without automatic needle insertion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M5/315—Pistons; Piston-rods; Guiding, blocking or restricting the movement of the rod or piston; Appliances on the rod for facilitating dosing ; Dosing mechanisms
- A61M5/31525—Dosing
- A61M5/31528—Dosing by means of rotational movements, e.g. screw-thread mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M5/315—Pistons; Piston-rods; Guiding, blocking or restricting the movement of the rod or piston; Appliances on the rod for facilitating dosing ; Dosing mechanisms
- A61M5/31533—Dosing mechanisms, i.e. setting a dose
- A61M5/31545—Setting modes for dosing
- A61M5/31548—Mechanically operated dose setting member
- A61M5/3155—Mechanically operated dose setting member by rotational movement of dose setting member, e.g. during setting or filling of a syringe
- A61M5/31551—Mechanically operated dose setting member by rotational movement of dose setting member, e.g. during setting or filling of a syringe including axial movement of dose setting member
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M5/32—Needles; Details of needles pertaining to their connection with syringe or hub; Accessories for bringing the needle into, or holding the needle on, the body; Devices for protection of needles
- A61M5/3202—Devices for protection of the needle before use, e.g. caps
- A61M5/3204—Needle cap remover, i.e. devices to dislodge protection cover from needle or needle hub, e.g. deshielding devices
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/20—Automatic syringes, e.g. with automatically actuated piston rod, with automatic needle injection, filling automatically
- A61M2005/2006—Having specific accessories
- A61M2005/2013—Having specific accessories triggering of discharging means by contact of injector with patient body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/178—Syringes
- A61M5/31—Details
- A61M2005/3125—Details specific display means, e.g. to indicate dose setting
- A61M2005/3126—Specific display means related to dosing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/58—Means for facilitating use, e.g. by people with impaired vision
- A61M2205/581—Means for facilitating use, e.g. by people with impaired vision by audible feedback
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/58—Means for facilitating use, e.g. by people with impaired vision
- A61M2205/582—Means for facilitating use, e.g. by people with impaired vision by tactile feedback
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/58—Means for facilitating use, e.g. by people with impaired vision
- A61M2205/583—Means for facilitating use, e.g. by people with impaired vision by visual feedback
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/58—Means for facilitating use, e.g. by people with impaired vision
- A61M2205/583—Means for facilitating use, e.g. by people with impaired vision by visual feedback
- A61M2205/584—Means for facilitating use, e.g. by people with impaired vision by visual feedback having a color code
Landscapes
- Health & Medical Sciences (AREA)
- Vascular Medicine (AREA)
- Engineering & Computer Science (AREA)
- Anesthesiology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Hematology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Infusion, Injection, And Reservoir Apparatuses (AREA)
Description
本開示は、送達デバイスに関し、特に、注入がなされたときに、聴覚的、触覚的、および/または視覚的な信号または確認をユーザに提供する、改善された、使い勝手の良い薬剤送達デバイスに関する。
薬剤送達デバイスは、自己投与のために開発されており、すなわち、ユーザは、薬剤送達を自分自身で行う。これは、使用するのが安全で取扱いが容易な薬剤送達デバイスを必要とする。これらの要件を満たすためには、人為的ミスの危険性を最小限に抑える必要があり、投与量を受け取るために実行する必要のある作業の数を減らす必要があり、デバイスは直感的で人間工学的に使用することができる必要がある。
例示的な実施形態によれば、送達デバイスのための駆動機構が開示される。駆動機構は、外面および内面を備える回転子であって、回転子は、第1の位置から第2の位置に回転するように構成されている、回転子と、回転子の外面と係合する内面を備える針カバーとを備える。駆動機構は、回転子によって画定されるキャビティ内に位置決めされたプランジャロッドばねをさらに備える。注入終了指示デバイスは、少なくとも部分的にプランジャロッドばね内に位置決めされ、注入終了指示デバイスは、注入が完了したという信号を駆動機構のユーザに提供する。
例示的な実施形態の特徴と考えられる新規な特徴が、添付の特許請求の範囲に記載されている。しかしながら、例示的な実施形態、ならびに好ましい使用モード、さらなる構造およびその説明が、添付の図面と併せて読むと、本開示の例示的な実施形態の以下の詳細な説明を参照することによって最もよく理解されるであろう。
本出願において、用語「近位部分/端」が使用される場合、これは、患者の薬剤送達部位から最も離れて位置する、送達デバイスの部分/端、またはその部材の部分/端を指す。対応して、用語「遠位部分/端」が使用される場合、これは、患者の薬剤送達部位の最も近くに位置する、送達デバイスの部分/端、またはその部材の部分/端を指す。
Claims (25)
- 薬剤送達デバイス(10)のための駆動機構(12)であって、
外面(64)および内面(68)を備える回転子(60)であって、前記回転子(60)は、第1の位置から第2の位置に回転するように構成されている、回転子(60)と、
前記回転子(60)の前記外面(64)と係合する内面(122)を備える針カバー(110)と、
前記回転子(60)によって画定されるキャビティ(69)内に位置決めされ、プランジャロッド(170)に作用するように構成されたプランジャロッドばね(150)と、
少なくとも部分的に前記プランジャロッドばね(150)内に位置決めされている注入終了指示デバイス(300)であって、前記注入終了指示デバイス(300)は、注入が完了したという信号を前記駆動機構(12)のユーザに提供する、注入終了指示デバイスと、
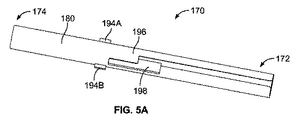
前記回転子(60)の内側に配置され、前記回転子(60)の前記内面(68)と係合するように構成された外面(180)を備える前記プランジャロッド(170)と
を備え、
前記回転子(60)が前記第1の位置にある場合、前記プランジャロッド(170)の遠位方向における軸方向移動が防止され、
前記針カバー(110)の遠位方向への移動により、前記プランジャロッド(170)に対する前記回転子(60)の前記第1の位置からの回転が開始され、
前記回転子(60)がさらに回転して前記第2の位置に到達することにより、前記プランジャロッドばね(150)によって生成される力の下で、前記プランジャロッド(170)が軸方向において遠位方向に移動することが可能になる、駆動機構(12)。 - 前記プランジャロッド(170)は、回転可能なプランジャロッド(170)である、請求項1に記載の駆動機構(12)。
- 前記回転子(60)は、前記回転可能なプランジャロッド(170)の遠位方向における軸方向移動を防止し、結果、前記プランジャロッドばね(150)を、前記回転可能なプランジャロッド(170)に力を加える予張状態に維持する、請求項2に記載の駆動機構(12)。
- 前記注入終了指示デバイス(300)は、初期位置から前記初期位置よりも近位側に位置する近位位置に軸方向に移動するように構成されており、
前記注入終了指示デバイス(300)は、前記近位位置に到達したときに、前記注入が完了したという信号を前記駆動機構(12)のユーザに提供し、
前記回転可能なプランジャロッド(170)の遠位方向における軸方向移動を防止することにより、前記初期位置にある前記注入終了指示デバイス(300)の近位方向の動きが防止される、請求項3に記載の駆動機構(12)。 - 前記回転可能なプランジャロッド(170)の前記外面(180)上の少なくとも1つのリブ(194A,B)をさらに備え、
前記回転子(60)の少なくとも1つの内側リブ(80A−D)が、前記回転可能なプランジャロッド(170)の前記外面(180)上の前記少なくとも1つのリブ(80A−D)と解放可能に係合するように構成されている、請求項2に記載の駆動機構(12)。 - 前記針カバー(110)の近位方向への移動が、前記回転子(60)を前記第1の位置から前記第2の位置へ移動させ、前記回転子(60)の前記内面(68)から半径方向内向きに突出する前記少なくとも1つの内側リブ(80A−D)が、前記プランジャロッド(170)の前記外面(180)上の前記少なくとも1つのリブ(194A,B)に係合することで、前記プランジャロッド(170)が回転する、請求項5に記載の駆動機構(12)。
- 前記プランジャロッド(170)を回転させることにより、前記プランジャロッドばね(150)によって生成される力の下で、前記プランジャロッド(170)が軸方向において遠位方向に移動することが可能になる、請求項6に記載の駆動機構(12)。
- 前記プランジャロッドばね(150)によって生成される力の下での前記プランジャロッド(170)の遠位方向における軸方向移動は、前記プランジャロッドばね(150)によって生成される力の下での前記注入終了指示デバイス(300)の近位移動を可能にする、請求項7に記載の駆動機構(12)。
- 前記注入終了指示デバイス(300)の近位移動の間に、前記注入終了指示デバイス(300)の近位支持面は、前記注入が完了したという信号を前記ユーザに生成するように、前記薬剤送達デバイス(10)の近位壁に衝突する、請求項8に記載の駆動機構(12)。
- 前記注入終了指示デバイス(300)の前記近位移動の間に、前記注入終了指示デバイス(300)の前記近位支持面は、前記注入が完了したという前記ユーザに対する可聴信号を生成するように、前記近位壁に衝突する、請求項9に記載の駆動機構(12)。
- 前記注入終了指示デバイス(300)は、前記注入が完了したという前記ユーザに対する視覚的信号をさらに提供する、請求項9に記載の駆動機構(12)。
- 前記注入終了指示デバイス(300)の前記近位移動の間に、前記注入終了指示デバイス(300)は、前記注入が完了したという前記ユーザに対する視覚的信号を生成する、請求項8に記載の駆動機構(12)。
- 前記駆動機構(12)は、前記視覚的信号を見るための少なくとも1つの観察窓(46)をさらに備える、請求項12に記載の駆動機構。
- 前記プランジャロッドばね(150)内に位置決めされた前記注入終了指示デバイス(300)は、
遠位端(224)から近位端(226)まで延在するガイドロッド(220)であって、
前記遠位端(224)から前記近位端(226)に向かって延伸する細長い部材(230)と、
前記細長い部材(230)の前記近位端(226)の近くに設けられた円板状部材(240)と
を備える、ガイドロッド(220)を備える、請求項1に記載の駆動機構(12)。 - 前記円板状部材(240)は、
遠位面(244)と、
前記薬剤送達デバイス(10)の近位端壁(48)と係合するように構成された支持面(248)を含む、近位面(246)と
をさらに備える、請求項14に記載の駆動機構(12)。 - 前記円板状部材(240)の前記遠位面(244)は、複数の可撓性アーム(260)をさらに備え、前記可撓性アーム(260)は、通常互いに向かって付勢される、請求項15に記載の駆動機構(12)。
- 前記可撓性アーム(260)は遠位方向に延伸する、請求項16に記載の駆動機構(12)。
- 前記複数の可撓性アーム(260)の各々は、半径方向に向けられたフック(266)を備える、請求項16に記載の駆動機構(12)。
- 各半径方向に向けられたフック(266)は、前記薬剤送達デバイス(10)によって画定される保持構造(32A,B)に解放可能に係合するように構成される、請求項18に記載の駆動機構(12)。
- 前記円板状部材(240)は、少なくとも1つのスロット(254,258)をさらに備え、前記スロット(254,258)は、前記薬剤送達デバイス(10)のガイド構造(36A,B)に係合するように構成される、請求項14に記載の駆動機構(12)。
- 請求項1〜20のいずれか1項に記載の駆動機構(12)を含む、薬剤送達デバイス(10)。
- 遠位端(14)および近位端(20)と、
前記薬剤送達デバイス(10)の外殻(26)であって、前記外殻(26)は前記外殻(26)内に収容された容器(200)内に収容された薬剤の投与量を投与するための駆動機構(12)を収容する、外殻(26)と、
をさらに備える、請求項21に記載の薬剤送達デバイス(10)。 - 前記薬剤送達デバイス(10)は、前記薬剤送達デバイス(10)の前記遠位端(14)の近くに設けられているキャップ(24)を有する初期の非作動状態にあり、
前記キャップ(24)は、前記針カバー(110)の環状接触部材(31)の遠位端面に当接する近位端面を備え、それによって、前記キャップ(24)が手動で操作されて離脱されると、前記針カバー(110)が、針カバーばね(50)からの力によって、非作動位置から作動位置へと動かされる、請求項22に記載の薬剤送達デバイス(10)。 - 前記外殻(26)は、外殻遠位端(28)および反対側の近位端(30)から延伸するほぼ管状の形状を含み、
前記外殻(26)は、第1の観察開口(44)と第2の観察開口(46)とをさらに含む、請求項22に記載の薬剤送達デバイス(10)。 - 前記第1の観察開口(44)は、前記外殻(26)の遠位端(34)の近くに設けられて、前記薬剤送達デバイス(10)が投与量を送達するためにすでに作動されているか否かを決定することを可能にし、
前記外殻(26)の前記第2の観察開口(46)は、前記外殻(26)の近位端(30)の近くに設けられ、注入が完了した後に、注入終了指示デバイス(300)の注入終了を観察することを可能にする、請求項24に記載の薬剤送達デバイス(10)。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/056,614 US20170246395A1 (en) | 2016-02-29 | 2016-02-29 | Delivery Device |
| US15/056,614 | 2016-02-29 | ||
| PCT/EP2017/051235 WO2017148618A1 (en) | 2016-02-29 | 2017-01-20 | Automatic delivery device with end of injection indication device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019506963A JP2019506963A (ja) | 2019-03-14 |
| JP6714093B2 true JP6714093B2 (ja) | 2020-06-24 |
Family
ID=57851091
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018545299A Expired - Fee Related JP6714093B2 (ja) | 2016-02-29 | 2017-01-20 | 注入終了指示デバイスを備えた自動送達デバイス |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US20170246395A1 (ja) |
| EP (1) | EP3423131B1 (ja) |
| JP (1) | JP6714093B2 (ja) |
| KR (1) | KR102194762B1 (ja) |
| CN (1) | CN108601899B (ja) |
| TW (1) | TWI641400B (ja) |
| WO (1) | WO2017148618A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20170246400A1 (en) * | 2016-02-29 | 2017-08-31 | Shl Group Ab | Delivery Device |
| US11826551B2 (en) | 2019-04-09 | 2023-11-28 | Battelle Memorial Institute | Autoinjectors having advanced release and sound features |
| EP4048350A1 (en) * | 2019-10-23 | 2022-08-31 | Becton Dickinson France | Injection device with an end-of-dose indicator |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050027255A1 (en) * | 2003-07-31 | 2005-02-03 | Sid Technologies, Llc | Automatic injector |
| DK2552517T3 (en) * | 2010-03-31 | 2017-04-03 | Shl Group Ab | PHARMACEUTICAL DELIVERY DEVICE INCLUDING FEEDBACK SIGNALS |
| ITFI20110194A1 (it) * | 2011-09-08 | 2013-03-09 | Menarini Int Operations Lu Sa | Dispositivo autoiniettore di dosi di farmaco |
| PT3412323T (pt) * | 2011-09-09 | 2021-02-22 | Merck Patent Gmbh | Um autoinjetor para injeção de epinefrina |
| IN2014DN09317A (ja) * | 2012-05-25 | 2015-07-10 | Aptar France Sas | |
| CH705992A2 (de) * | 2012-10-11 | 2013-06-14 | Tecpharma Licensing Ag | Injektionsvorrichtung. |
| EP3590568A1 (de) * | 2013-03-22 | 2020-01-08 | TecPharma Licensing AG | Substanzabgabevorrichtung mit signalvorrichtung |
| EP2823837A1 (en) * | 2013-07-09 | 2015-01-14 | Sanofi-Aventis Deutschland GmbH | Autoinjector |
| WO2015073740A2 (en) * | 2013-11-13 | 2015-05-21 | Genentech, Inc. | Assisted manual injector devices and methods |
-
2016
- 2016-02-29 US US15/056,614 patent/US20170246395A1/en not_active Abandoned
-
2017
- 2017-01-20 EP EP17700851.3A patent/EP3423131B1/en active Active
- 2017-01-20 CN CN201780011141.5A patent/CN108601899B/zh not_active Expired - Fee Related
- 2017-01-20 JP JP2018545299A patent/JP6714093B2/ja not_active Expired - Fee Related
- 2017-01-20 KR KR1020187024817A patent/KR102194762B1/ko active IP Right Grant
- 2017-01-20 WO PCT/EP2017/051235 patent/WO2017148618A1/en active Application Filing
- 2017-02-16 TW TW106103851A patent/TWI641400B/zh not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| EP3423131B1 (en) | 2022-04-27 |
| KR102194762B1 (ko) | 2020-12-24 |
| TWI641400B (zh) | 2018-11-21 |
| CN108601899A (zh) | 2018-09-28 |
| US20170246395A1 (en) | 2017-08-31 |
| EP3423131A1 (en) | 2019-01-09 |
| TW201737956A (zh) | 2017-11-01 |
| KR20180104734A (ko) | 2018-09-21 |
| JP2019506963A (ja) | 2019-03-14 |
| WO2017148618A1 (en) | 2017-09-08 |
| CN108601899B (zh) | 2021-04-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102205100B1 (ko) | 전달 장치 | |
| US11484667B2 (en) | Medicament delivery device | |
| KR101664632B1 (ko) | 최초 로크된 상태, 중간 프라이밍 상태, 및 약물 주입 상태를 갖는 약물 주입 장치 | |
| KR102016829B1 (ko) | 자동주사기를 위한 구동 기구 | |
| EP2640449B1 (en) | Medicament delivery device | |
| BR112014005489B1 (pt) | autoinjetor recarregável e método para operar um autoinjetor recarregável | |
| JP6714093B2 (ja) | 注入終了指示デバイスを備えた自動送達デバイス | |
| KR20160117594A (ko) | 약제 분배 장치 및 방법 | |
| JP2018537251A (ja) | 薬剤送達装置 | |
| US11065390B2 (en) | Automatic delivery device with end of injection indication device | |
| US20230166046A1 (en) | Delivery device | |
| US11612700B2 (en) | Delivery device | |
| JP2024501680A (ja) | 薬剤送達デバイス |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181026 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190204 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20190423 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190918 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191001 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191225 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200512 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200604 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6714093 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |