JP6704726B2 - エッジ検出装置、エッジ検出方法、及び、プログラム - Google Patents
エッジ検出装置、エッジ検出方法、及び、プログラム Download PDFInfo
- Publication number
- JP6704726B2 JP6704726B2 JP2015248321A JP2015248321A JP6704726B2 JP 6704726 B2 JP6704726 B2 JP 6704726B2 JP 2015248321 A JP2015248321 A JP 2015248321A JP 2015248321 A JP2015248321 A JP 2015248321A JP 6704726 B2 JP6704726 B2 JP 6704726B2
- Authority
- JP
- Japan
- Prior art keywords
- edge
- value
- detection
- degree
- dispersion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000003708 edge detection Methods 0.000 title claims description 62
- 238000000034 method Methods 0.000 title claims description 50
- 239000006185 dispersion Substances 0.000 claims description 140
- 238000001514 detection method Methods 0.000 claims description 134
- 230000035945 sensitivity Effects 0.000 claims description 92
- 238000012937 correction Methods 0.000 claims description 47
- 238000006243 chemical reaction Methods 0.000 claims description 10
- 238000012545 processing Methods 0.000 description 45
- 238000010586 diagram Methods 0.000 description 19
- 238000007792 addition Methods 0.000 description 14
- 101150111419 ATH1 gene Proteins 0.000 description 9
- 101100433747 Arabidopsis thaliana ABCA2 gene Proteins 0.000 description 9
- 101100054301 Arabidopsis thaliana ABCA3 gene Proteins 0.000 description 9
- 101100288148 Arabidopsis thaliana KNAT5 gene Proteins 0.000 description 9
- 101100135611 Arabidopsis thaliana PAP12 gene Proteins 0.000 description 9
- 101100084018 Arabidopsis thaliana PAP25 gene Proteins 0.000 description 9
- 101150002428 Atoh1 gene Proteins 0.000 description 9
- 101100046800 Brassica napus BTH1 gene Proteins 0.000 description 9
- 101100057132 Candida albicans (strain SC5314 / ATCC MYA-2876) ATC1 gene Proteins 0.000 description 9
- 101100348113 Mus musculus Neurod6 gene Proteins 0.000 description 9
- 102100029373 Transcription factor ATOH1 Human genes 0.000 description 9
- 230000007423 decrease Effects 0.000 description 6
- 101100435070 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) APN2 gene Proteins 0.000 description 5
- 101100401199 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) SAM2 gene Proteins 0.000 description 5
- 101100268779 Solanum lycopersicum ACO1 gene Proteins 0.000 description 5
- 230000006870 function Effects 0.000 description 5
- 230000006866 deterioration Effects 0.000 description 1
- 238000007429 general method Methods 0.000 description 1
Images













Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T3/00—Geometric image transformation in the plane of the image
- G06T3/40—Scaling the whole image or part thereof
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/13—Edge detection
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/136—Segmentation; Edge detection involving thresholding
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10004—Still image; Photographic image
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20021—Dividing image into blocks, subimages or windows
Description
入力画像データの階調値の分散度合いを検出する検出手段と、
前記検出手段によって検出された前記分散度合いに基づいて、複数の方向のそれぞれについて、その方向のエッジの検出されやすさである検出感度を決定する決定手段と、
前記決定手段によって決定された検出感度で、前記入力画像データに基づく入力画像からエッジを検出するエッジ検出手段と、
を有し、
前記決定手段は、前記分散度合いが小さい場合に、前記分散度合いが大きい場合に比べ低い検出感度を決定する
ことを特徴とするエッジ検出装置である。
入力画像データの階調値の分散度合いを検出する検出ステップと、
前記検出ステップにおいて検出された前記分散度合いに基づいて、複数の方向のそれぞれについて、その方向のエッジの検出されやすさである検出感度を決定する決定ステップと、
前記決定ステップにおいて決定された検出感度で、前記入力画像データに基づく入力画像からエッジを検出するエッジ検出ステップと、
を有し、
前記決定ステップでは、前記分散度合いが小さい場合に、前記分散度合いが大きい場合に比べ低い検出感度が決定される
ことを特徴とするエッジ検出方法である。
以下、本発明の実施例1について説明する。以下では、画像データの画像サイズを変更(拡大または縮小)することで画像データの解像度を変換するスケーラ処理を実行可能な画像処理装置に、本実施例に係るエッジ検出装置が設けられている例を説明する。なお、画像処理装置で実行される画像処理は、スケーラ処理に限られない。例えば、画像処理として、ぼかし処理、エッジ強調処理、輝度変換処理、色変換処理、等が行われてもよい。また、エッジ検出装置は、画像処理装置とは別体の装置であってもよい。
YDATA=0.2×R値+0.7×G値+0.1×B値 ・・・(式1)
なデータのライン数、ブロックデータBLKDATAの画像領域サイズ(画素数)は、特に限定されない。
また、垂直方向における参照ブロックAと参照ブロックBのずれの大きさは、1画素分の大きさより大きくてもよい。参照ブロックA,Bの形状は、三角形、五角形、六角形、長方形、台形、ひし形、円形(真円形や楕円形)、等であってもよい。
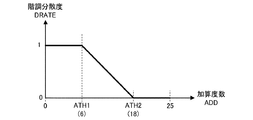
ADD=D1st+D2nd ・・・(式2)
ナルティPに変換される。PMAXは、検出感度ペナルティPの上限値である。図7の例では、閾値BTH1=4であり、閾値BTH2=12であり、上限値PMAX=256である。
OFST(n)=P(n)×RGAIN ・・・(式3)
SAD_ARRAY_OFST(n)=SAD_ARRAY(n)
+OFST(n)
・・・(式4)
SAD_ARRAY_OFST(n)が大きいほど、ブロック距離nに対応する方向のエッジが検出されにくい。そして、式4に示すように、SAD値SAD_ARRAY(n)にオフセット値OFST(n)を加算することにより、SAD値SAD_ARRAY_OFST(n)が算出される。そのため、オフセット値OFST(n)が大きいほど大きい低減度合いで、ブロック距離nに対応する方向のエッジの検出感度が低減される。
U1(x)=INT(ix_i+ix_s+ANGLE_SC×iy_s)
U2(x)=U1(x)+1
D1(x)=U1(x)−ANGLE_SC
D2(x)=D1(x)+1
・・・(式5)
k=(ix_s+ANGLE_SC×iy_s)
−INT(ix_s+ANGLE_SC×iy_s)
・・・(式6)
DOUT=(PD(U1(x),iy_i)×(1−k)
+PD(U2(x),iy_i)×k)×(1−iy_s)
+(PD(D1(x),iy_i+1)×k
+PD(D2(x)、iy_i+1)×(1−k))×iy_s
・・・(式7)
以下、本発明の実施例2について説明する。実施例1では、ブロックマッチングの結果であるSAD値を補正する例を説明した。本実施例では、ブロックマッチングの結果に応じたエッジの検出結果を補正する例を説明する。なお、以下では、実施例1と異なる構成や処理について詳しく説明し、実施例1と同様の構成や処理についての説明は省略する。
例では、エッジ検出部101の処理が実施例1と異なる。図11は、本実施例に係るエッジ検出部101の構成の一例を示すブロック図である。図11において、実施例1と同じ機能部には実施例1と同じ符号を付し、その機能部についての説明は省略する。
PENAを決定する処理は、「検出感度を決定する処理」と言える。そして、SAD値SAD_ARRAY(n)と信頼度ペナルティQPENAとに基づいて角度情報ANGLEを決定する処理は、「決定された検出感度でエッジを検出する処理」と言える。
・QPENA>QTHの場合:
角度情報ANGLE=0に、角度情報ANGLEが補正される。
・QPENA≦QTHの場合:
角度情報ANGLEは補正されない。
施例1の方法で画素値DOUTが決定され、信頼度が低い場合に、SC補間位置に最も近い4つの画素を用いて画素値DOUTが決定されてもよい。
以下、本発明の実施例3について説明する。実施例1では、階調分散度の検出対象の画像領域のサイズが固定されている場合の例を説明した。本実施例では、ブロックマッチングで使用される参照範囲のサイズに応じて、階調分散度の検出対象の画像領域のサイズを決定する例を説明する。なお、以下では、実施例1と異なる構成や処理について詳しく説明し、実施例1と同様の構成や処理についての説明は省略する。
RESO=(HRESO×VRESO)×α ・・・(式8)
本発明は、上述の実施例の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサーがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
204,204:階調分散度検出部 205:オフセット値決定部
206:オフセット部 207,307:マッチング角度決定部
305:信頼度ペナルティ決定部
Claims (16)
- 入力画像データの階調値の分散度合いを検出する検出手段と、
前記検出手段によって検出された前記分散度合いに基づいて、複数の方向のそれぞれについて、その方向のエッジの検出されやすさである検出感度を決定する決定手段と、
前記決定手段によって決定された検出感度で、前記入力画像データに基づく入力画像からエッジを検出するエッジ検出手段と、
を有し、
前記決定手段は、前記分散度合いが小さい場合に、前記分散度合いが大きい場合に比べ低い検出感度を決定する
ことを特徴とするエッジ検出装置。 - 前記決定手段は、前記分散度合いが小さい場合に、水平方向に近い方向のエッジの検出感度として、水平方向から遠い方向のエッジの検出感度よりも低い検出感度を決定する
ことを特徴とする請求項1に記載のエッジ検出装置。 - 前記検出手段は、前記入力画像データの階調値のヒストグラムの複数のカテゴリのうち、度数が多いカテゴリから順番にN個(Nは2以上の整数)のカテゴリの度数の総和が大きい場合に、前記総和が小さい場合に比べ小さい分散度合いを決定する
ことを特徴とする請求項1または2に記載のエッジ検出装置。 - 前記検出手段は、前記入力画像データの階調値のヒストグラムの複数のカテゴリのうち、度数が閾値より多いカテゴリの総数が少ない場合に、前記総数が多い場合に比べ小さい分散度合いを決定する
ことを特徴とする請求項1または2に記載のエッジ検出装置。 - 前記検出手段は、前記入力画像データの階調値が略同一である画素の総数が少ない場合に、前記総数が多い場合に比べ小さい分散度合いを決定する
ことを特徴とする請求項1または2に記載のエッジ検出装置。 - 前記検出手段は、前記入力画像データの階調値が所定の画素の前記入力画像データの階
調値と略同一である画素の総数に基づいて、前記分散度合いを決定する
ことを特徴とする請求項5に記載のエッジ検出装置。 - 前記検出手段は、
複数の階調値のそれぞれについて、その階調値と前記入力画像データの階調値が略同一である画素の総数を検出し、
検出した複数の総数の最大値に基づいて、前記分散度合いを決定する
ことを特徴とする請求項5に記載のエッジ検出装置。 - 前記エッジ検出手段は、2つの参照ブロックの位置を変えながら前記2つの参照ブロックにおける前記入力画像を比較するブロックマッチングの結果に基づいてエッジを検出し、
前記決定手段は、前記検出感度として、前記ブロックマッチングの結果を補正する補正パラメータを決定する
ことを特徴とする請求項1〜7のいずれか1項に記載のエッジ検出装置。 - 前記決定手段は、
前記2つの参照ブロックの間の距離に応じて第1補正パラメータを決定し、
前記分散度合いに応じて第2補正パラメータを決定し、
前記第1補正パラメータと前記第2補正パラメータに応じて、前記ブロックマッチングの結果を補正する前記補正パラメータを決定する
ことを特徴とする請求項8に記載のエッジ検出装置。 - 前記エッジ検出手段は、2つの参照ブロックの位置を変えながら前記2つの参照ブロックにおける前記入力画像を比較するブロックマッチングの結果に基づいてエッジを検出し、
前記決定手段は、前記検出感度として、前記ブロックマッチングの結果に応じたエッジの検出結果を補正する補正パラメータを決定する
ことを特徴とする請求項1〜7のいずれか1項に記載のエッジ検出装置。 - 前記検出手段は、所定の画像領域における階調値の分散度合いを検出する
ことを特徴とする請求項1〜10のいずれか1項に記載のエッジ検出装置。 - 前記エッジ検出手段は、参照範囲内で2つの参照ブロックの位置を変えながら前記2つの参照ブロックにおける前記入力画像を比較するブロックマッチングの結果に基づいてエッジを検出し、
前記参照範囲のサイズは変更可能であり、
前記検出手段は、前記参照範囲のサイズが大きい場合に、前記参照範囲のサイズが小さい場合に比べ大きい画像領域における階調値の分散度合いを検出する
ことを特徴とする請求項1〜11のいずれか1項に記載のエッジ検出装置。 - 前記入力画像データの解像度が低い場合における前記参照範囲のサイズは、前記入力画像データの解像度が高い場合における前記参照範囲のサイズよりも小さい
ことを特徴とする請求項12に記載のエッジ検出装置。 - 前記エッジ検出手段による検出結果に基づき、前記入力画像データの解像度を変換する変換手段、をさらに有する
ことを特徴とする請求項1〜13のいずれか1項に記載のエッジ検出装置。 - 入力画像データの階調値の分散度合いを検出する検出ステップと、
前記検出ステップにおいて検出された前記分散度合いに基づいて、複数の方向のそれぞれについて、その方向のエッジの検出されやすさである検出感度を決定する決定ステップと、
前記決定ステップにおいて決定された検出感度で、前記入力画像データに基づく入力画像からエッジを検出するエッジ検出ステップと、
を有し、
前記決定ステップでは、前記分散度合いが小さい場合に、前記分散度合いが大きい場合に比べ低い検出感度が決定される
ことを特徴とするエッジ検出方法。 - 請求項15に記載のエッジ検出方法の各ステップをコンピュータに実行させるためのプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015248321A JP6704726B2 (ja) | 2015-12-21 | 2015-12-21 | エッジ検出装置、エッジ検出方法、及び、プログラム |
| US15/362,167 US10311546B2 (en) | 2015-12-21 | 2016-11-28 | Edge detection apparatus and edge detection method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015248321A JP6704726B2 (ja) | 2015-12-21 | 2015-12-21 | エッジ検出装置、エッジ検出方法、及び、プログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017116985A JP2017116985A (ja) | 2017-06-29 |
| JP2017116985A5 JP2017116985A5 (ja) | 2019-01-24 |
| JP6704726B2 true JP6704726B2 (ja) | 2020-06-03 |
Family
ID=59064424
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015248321A Expired - Fee Related JP6704726B2 (ja) | 2015-12-21 | 2015-12-21 | エッジ検出装置、エッジ検出方法、及び、プログラム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10311546B2 (ja) |
| JP (1) | JP6704726B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110702705B (zh) * | 2019-11-20 | 2022-04-29 | 大连交通大学 | 一种基于原子分辨电镜的负载金属催化剂分散度测算方法 |
| CN113781506B (zh) * | 2021-08-06 | 2023-12-15 | 东北大学 | 一种带钢偏移量检测方法及系统 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60105081A (ja) | 1983-11-14 | 1985-06-10 | Fujitsu Ltd | 輪郭抽出装置 |
| JP3826412B2 (ja) * | 1995-05-31 | 2006-09-27 | ソニー株式会社 | エッジ検出方法及びエッジ検出装置 |
| JP4358055B2 (ja) | 2004-07-21 | 2009-11-04 | 株式会社東芝 | 補間画素生成回路 |
| WO2012098854A1 (ja) * | 2011-01-20 | 2012-07-26 | 日本電気株式会社 | 画像処理システム、画像処理方法および画像処理用プログラム |
-
2015
- 2015-12-21 JP JP2015248321A patent/JP6704726B2/ja not_active Expired - Fee Related
-
2016
- 2016-11-28 US US15/362,167 patent/US10311546B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US10311546B2 (en) | 2019-06-04 |
| US20170178337A1 (en) | 2017-06-22 |
| JP2017116985A (ja) | 2017-06-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11044453B2 (en) | Data processing apparatus, imaging apparatus and data processing method | |
| JP6157138B2 (ja) | 画像処理装置 | |
| US9983841B2 (en) | Projection type image display apparatus, method, and storage medium in which changes in luminance between an image overlap area and an area outside the image overlap area are less visible | |
| JP6172935B2 (ja) | 画像処理装置、画像処理方法及び画像処理プログラム | |
| JP6128987B2 (ja) | 画像処理装置、画像処理方法及び画像処理プログラム | |
| US10163035B2 (en) | Edge detecting apparatus and edge detecting method | |
| JP2017151908A (ja) | 画像補正装置、画像補正方法及び画像補正用コンピュータプログラム | |
| JP2012165146A (ja) | 画像処理装置及び方法 | |
| JP5887764B2 (ja) | 動き補償フレーム生成装置及び方法 | |
| US8036459B2 (en) | Image processing apparatus | |
| JP6704726B2 (ja) | エッジ検出装置、エッジ検出方法、及び、プログラム | |
| JP2014027373A (ja) | 画像処理装置、画像処理方法及び画像処理プログラム | |
| JP2011205477A (ja) | 画像処理装置および方法,ならびに画像処理プログラム | |
| JP6815345B2 (ja) | 画像信号処理装置、画像処理回路 | |
| KR100690171B1 (ko) | 이미지 보정 회로 및 이미지 보정 방법 | |
| JP4872508B2 (ja) | 画像処理装置および画像処理方法、並びにプログラム | |
| US20070086059A1 (en) | Image sharpness device and method | |
| JP5322824B2 (ja) | 解像度変換装置および解像度変換方法 | |
| JP5928465B2 (ja) | 劣化復元システム、劣化復元方法およびプログラム | |
| JP6583008B2 (ja) | 画像補正装置、画像補正方法及び画像補正用コンピュータプログラム | |
| JP2011171991A (ja) | 画像処理装置、電子機器、画像処理方法、および、画像処理プログラム | |
| US9591220B2 (en) | Selection apparatus, selection method, and storage medium | |
| JP2019045990A (ja) | 画像処理装置、画像処理方法、およびプログラム | |
| JP6808770B2 (ja) | データ処理装置、撮像装置、およびデータ処理方法 | |
| JP6150576B2 (ja) | 画像処理装置及びその制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20181116 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181205 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181205 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191016 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191112 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191218 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200414 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200513 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6704726 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |