JP6685568B2 - Force sensor - Google Patents
Force sensor Download PDFInfo
- Publication number
- JP6685568B2 JP6685568B2 JP2019117416A JP2019117416A JP6685568B2 JP 6685568 B2 JP6685568 B2 JP 6685568B2 JP 2019117416 A JP2019117416 A JP 2019117416A JP 2019117416 A JP2019117416 A JP 2019117416A JP 6685568 B2 JP6685568 B2 JP 6685568B2
- Authority
- JP
- Japan
- Prior art keywords
- force
- axis
- electrode
- fixed
- force sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




































Description
本発明は、力覚センサに関し、特に、所定の軸方向に作用した力及び所定の回転軸まわりに作用したモーメント(トルク)を電気信号として出力する機能をもったセンサに関する。 The present invention relates to a force sensor, and more particularly to a sensor having a function of outputting a force acting in a predetermined axial direction and a moment (torque) acting around a predetermined rotation axis as an electric signal.
所定の軸方向に沿って作用した力及び所定の回転軸まわりに作用したモーメントを電気信号として出力する機能をもった力覚センサが、例えば特許文献1に記載されており、産業用ロボットの力制御に広く利用されている。近年では、生活支援ロボットへも採用されている。力覚センサの市場が拡大するにつれて、力覚センサの低価格化及び高性能化が一層求められるようになった。
A force sensor having a function of outputting a force acting along a predetermined axial direction and a moment acting around a predetermined rotation axis as an electric signal is described in, for example,
ところで、力覚センサとしては、容量素子の静電容量値の変動量に基づいて力ないしモーメントを検出する静電容量タイプの力覚センサや、歪ゲージの電気抵抗値の変動量に基づいて力ないしモーメントを検出する歪ゲージタイプの力覚センサが利用されている。このうち、歪ゲージタイプの力覚センサは、起歪体(弾性体)の構造が複雑であり、また、その製造工程において起歪体に歪ゲージを貼付するという工程が必要である。このように歪ゲージタイプの力覚センサは、製造コストがかかるため、低価格化が困難である。 By the way, as the force sensor, a capacitance type force sensor that detects a force or a moment based on a variation amount of a capacitance value of a capacitive element, or a force sensor based on a variation amount of an electric resistance value of a strain gauge is used. A strain gauge type force sensor that detects a moment is used. Among these, the strain gauge type force sensor has a complicated structure of a strain generating body (elastic body), and requires a step of attaching a strain gauge to the strain generating body in its manufacturing process. As described above, the strain gauge type force sensor requires a high manufacturing cost, and thus it is difficult to reduce the cost.
これに対し、静電容量タイプの力覚センサは、1組の平行平板(容量素子)によって作用した力ないしモーメントを計測することができるため、容量素子を含む起歪体の構造を簡素化することができる。すなわち、静電容量タイプの力覚センサは、相対的に製造コストがかからないため、低価格化が容易である、というメリットを有する。したがって、容量素子を含む起歪体の構造を更に簡素化すれば、静電容量タイプの力覚センサにおいて、一層の低価格化を実現することができる。 On the other hand, the capacitance type force sensor can measure the force or the moment applied by a pair of parallel flat plates (capacitance elements), so that the structure of the strain generating body including the capacitance elements is simplified. be able to. That is, the capacitance type force sensor has an advantage that it is easy to reduce the cost because the manufacturing cost is relatively low. Therefore, by further simplifying the structure of the flexure element including the capacitive element, it is possible to further reduce the cost of the capacitance type force sensor.
本発明による力覚センサは、XYZ三次元座標系における各軸方向の力及び各軸まわりのモーメントのうち少なくとも1つを検出するものであって、
Z軸方向から見て原点Oを取り囲むように配置され、力ないしモーメントの作用によって弾性変形を生じる環状の変形体と、
前記変形体に生じる弾性変形に基づいて、作用した力ないしモーメントを示す電気信号を出力する検出回路と、を備え、
前記変形体は、XYZ三次元座標系に対して固定された2つの固定部と、当該変形体の周方向において前記固定部と交互に位置付けられ、力ないしモーメントの作用を受ける、2つの受力部と、当該変形体の周方向において隣接する前記固定部と前記受力部との間に位置付けられた4つの変形部と、を有し、
各変形部は、Z軸方向に膨出した湾曲部を有し、
前記検出回路は、前記湾曲部に生じる弾性変形に基づいて、前記電気信号を出力するようになっている。
A force sensor according to the present invention detects at least one of a force in each axial direction and a moment around each axis in an XYZ three-dimensional coordinate system,
An annular deformable body that is arranged so as to surround the origin O when viewed from the Z-axis direction and that elastically deforms by the action of a force or moment;
A detection circuit that outputs an electrical signal indicating an applied force or moment based on elastic deformation of the deformable body,
The deformable body is provided with two fixed portions fixed to the XYZ three-dimensional coordinate system, and two force receiving members that are alternately positioned with the fixed portions in the circumferential direction of the deformable body and that receive a force or a moment. A portion and four deforming portions positioned between the fixed portion and the force receiving portion that are adjacent to each other in the circumferential direction of the deformable body,
Each deformed portion has a curved portion that bulges in the Z-axis direction,
The detection circuit outputs the electric signal based on the elastic deformation of the bending portion.
本発明によれば、Z軸方向に膨出した湾曲部を有する簡素な変形体によって、検出部位において、作用した力ないしモーメントに対応する変位をZ軸方向に生じさせることができる。このため、容量素子を構成する一対の電極をXY平面と平行に配置することがでるため、容量素子を構成することが容易である。つまり、従来の静電容量タイプの力覚センサでは、作用した力ないしモーメントに対応する変位がZ軸と直交する方向に生じていたため、固定体の上面にZ軸方向に延在する支持体を設けた上で、この支持体に対して他方の電極(固定電極)を設置しなければならず、構造がやや複雑であった。このような従来の電極の配置例に鑑みると、本発明の効果がより良く理解され得る。本発明によれば、以上のような簡素な構造が採用されていることにより、従来よりも安価な静電容量タイプの力覚センサを提供することができる。とりわけ、複数の容量素子を有する力覚センサにおいて、各一対の電極のうち固定電極(湾曲部に配置される変位電極に対向する電極)を、共通の基板を用いて構成することができる。更には、固定電極を、複数の容量素子に対応する共通の電極として構成することも可能である。 According to the present invention, the displacement corresponding to the applied force or moment can be generated in the Z-axis direction at the detection site by the simple deformable body having the curved portion that bulges in the Z-axis direction. Therefore, the pair of electrodes forming the capacitor can be arranged in parallel with the XY plane, so that the capacitor can be easily formed. That is, in the conventional capacitance type force sensor, the displacement corresponding to the applied force or moment is generated in the direction orthogonal to the Z axis, so that the support body extending in the Z axis direction is provided on the upper surface of the fixed body. The other electrode (fixed electrode) had to be installed on this support after being provided, and the structure was rather complicated. In view of such a conventional arrangement example of the electrodes, the effect of the present invention can be better understood. According to the present invention, by adopting the simple structure as described above, it is possible to provide a capacitance-type force sensor that is less expensive than conventional ones. In particular, in the force sensor having a plurality of capacitance elements, the fixed electrode (the electrode facing the displacement electrode arranged in the curved portion) of each pair of electrodes can be configured using a common substrate. Furthermore, the fixed electrode can be configured as a common electrode corresponding to a plurality of capacitive elements.
このような力覚センサは、XYZ三次元座標系に対して固定された固定体と、
力ないしモーメントの作用によって、前記固定部に対して相対移動する受力体と、を更に備え、
前記変形体の前記固定部は、前記固定体に接続され、
前記変形体の前記受力部は、前記受力体に接続されている
というように構成されていても良い。
Such a force sensor includes a fixed body fixed with respect to an XYZ three-dimensional coordinate system,
A force receiving member that moves relative to the fixed portion by the action of a force or a moment,
The fixed portion of the deformable body is connected to the fixed body,
The force receiving portion of the deformable body may be configured to be connected to the force receiving body.
この場合、変形体に対して力ないしモーメントを作用させることが容易である。 In this case, it is easy to apply a force or moment to the deformable body.
前記固定体及び前記受力体には、Z軸が挿通する貫通孔がそれぞれ形成されていて良い。この場合、力覚センサを軽量化することができ、更に、力覚センサの設置の自由度を高めることもできる。 Through holes through which the Z axis is inserted may be formed in the fixed body and the force receiving body, respectively. In this case, the force sensor can be reduced in weight, and the degree of freedom in installing the force sensor can be increased.
前記2つの固定部は、Z軸方向から見て、前記変形体がX軸と重なる部位にY軸に関して対称的に配置されており、
前記2つの受力部は、Z軸方向から見て、前記変形体がY軸と重なる部位にX軸に関して対称的に配置されていて良い。
The two fixing portions are arranged symmetrically with respect to the Y axis at a portion where the deformable body overlaps with the X axis when viewed from the Z axis direction,
The two force receiving portions may be arranged symmetrically with respect to the X axis at a portion where the deformable body overlaps with the Y axis when viewed in the Z axis direction.
この場合、作用する力ないしモーメントを変形体に効果的に伝達することができる。 In this case, the acting force or moment can be effectively transmitted to the deformable body.
前記変形体は、Z軸方向から見て、原点Oを中心とする円環の形状を有していて良い。 The deformable body may have an annular shape centered on the origin O when viewed from the Z-axis direction.
あるいは、前記変形体は、Z軸方向から見て、原点Oを中心とする矩形の形状を有していて良い。 Alternatively, the deformable body may have a rectangular shape centered on the origin O when viewed from the Z-axis direction.
これらの場合、変形体がX軸及びY軸に関して対称的に配置されるため、作用した力ないしモーメントに起因して、変形体が対称的に変形する。このため、当該変形に基づいて作用した力ないしモーメントを計測することが、容易である。 In these cases, since the deformable body is arranged symmetrically with respect to the X axis and the Y axis, the deformable body is deformed symmetrically due to the applied force or moment. Therefore, it is easy to measure the force or moment acting on the basis of the deformation.
前記変形体の各湾曲部は、Z軸負方向に膨出しており、
前記検出回路は、各湾曲部に1つずつ配置された合計4つの変位電極と、これらの変位電極に対向配置され、前記固定部に固定された固定電極と、を有し、
各変位電極と前記固定電極とは、4組の容量素子を構成し、
前記検出回路は、前記4組の容量素子の静電容量値の変動量に基づいて、作用した力ないしモーメントを示す電気信号を出力するようになっていて良い。
Each curved portion of the deformable body bulges in the negative direction of the Z axis,
The detection circuit has a total of four displacement electrodes, one disposed on each curved portion, and a fixed electrode that is disposed so as to face the displacement electrodes and is fixed to the fixed portion,
Each displacement electrode and the fixed electrode constitute four sets of capacitive elements,
The detection circuit may output an electric signal indicating an applied force or moment based on the amount of change in the capacitance value of the four sets of capacitive elements.
この場合、個々の容量素子の静電容量値の変動の組合せに着目することによって、XYZ三次元座標系における各軸方向の力及び各軸まわりのモーメントの合計6つの成分のうち、複数の成分を検出することができる。 In this case, by paying attention to the combination of variations in the capacitance value of each capacitive element, a plurality of components out of a total of six components of the force in each axial direction and the moment around each axis in the XYZ three-dimensional coordinate system can be obtained. Can be detected.
XY平面上に、原点Oを通りX軸およびY軸に対して45°をなすV軸およびW軸を定義した場合に、前記4組の容量素子は、Z軸方向から見て前記変形体がV軸及びW軸と交わる4つの部位に、1つずつ配置されていて良い。 When the V axis and the W axis that pass through the origin O and form 45 ° with respect to the X axis and the Y axis are defined on the XY plane, the four sets of capacitive elements are One may be arranged at each of four sites intersecting with the V axis and the W axis.
この場合、容量素子がX軸及びY軸に関して対称的に配置されるため、特にX軸及びY軸に関して対称的な形状の変形体を作用した場合に、高い対称性をもって、各容量素子の静電容量値が変動する。このため、静電容量値の変動量に基づいて、作用した力ないしモーメントを極めて容易に計測することができる。 In this case, since the capacitive elements are arranged symmetrically with respect to the X-axis and the Y-axis, when the deformed body having a symmetrical shape with respect to the X-axis and the Y-axis is applied, the static elements of the capacitive elements have high symmetry. The capacitance value fluctuates. Therefore, the applied force or moment can be very easily measured based on the variation amount of the capacitance value.
このような力覚センサにおいて、前記変形体の各湾曲部には、各1つの変形体側支持体が接続されており、
前記4つの変位電極は、それぞれ、対応する前記変形体側支持体によって支持されていて良い。
In such a force sensor, one deformation body side support body is connected to each bending portion of the deformation body,
Each of the four displacement electrodes may be supported by the corresponding deformable body side support.
仮に変位電極が直接的に湾曲部に貼り付けられていれば、当該変位電極には、湾曲部の変形の影響によって反りが生じてしまうが、以上のような構成を採用すれば、変位電極に反りを生じさせることがないため、湾曲部に生じる弾性変形を効率的に容量素子の静電容量値の変動に変換することができる。 If the displacement electrode is directly attached to the curved portion, the displacement electrode will be warped due to the influence of the deformation of the curved portion. Since no warpage occurs, elastic deformation occurring in the curved portion can be efficiently converted into fluctuations in the capacitance value of the capacitive element.
以上の力覚センサは、前記変形体の各湾曲部には、最もZ軸負側に位置する部位にそれぞれ検出部位が規定されており、
前記変形体側支持体は、それぞれ、Z軸方向から見て、当該変形体側支持体が接続された前記湾曲部の前記検出部位に重なるように配置された梁と、この梁の一端を前記検出部位とは異なる位置において前記湾曲部に接続する接続体と、を有し、
前記変位電極は、それぞれ、対応する前記変形体側支持体の前記梁によって支持されている
というように構成されていても良い。
In the force sensor described above, a detection portion is defined in each of the curved portions of the deformable body at a portion located closest to the Z-axis negative side,
Each of the deformable body side support bodies is arranged so as to overlap with the detection site of the curved portion to which the deformable body side support body is connected, and one end of the beam is located at the detection site. A connecting body connected to the bending portion at a position different from,
Each of the displacement electrodes may be configured to be supported by the corresponding beam of the corresponding deformable body side support.
この場合、梁が検出部位とは異なる位置において湾曲部に接続されているため、この梁によって支持された変位電極に生じる変位が増幅される。すなわち、ある大きさの力ないしモーメントが作用した場合に、このような力覚センサにおいて変位電極に生じる変位は、湾曲部の検出部位において変位電極が支持されている力覚センサにおいて当該変位電極に生じる変位よりも、大きい。このため、作用した力ないしモーメントに対する感度が高く、より精度の高い計測を行うことができる。 In this case, since the beam is connected to the bending portion at a position different from the detection site, the displacement generated in the displacement electrode supported by this beam is amplified. That is, when a certain amount of force or moment acts, the displacement generated in the displacement electrode in such a force sensor is applied to the displacement electrode in the force sensor in which the displacement electrode is supported at the detection site of the bending portion. Greater than the resulting displacement. Therefore, the sensitivity to the applied force or moment is high, and more accurate measurement can be performed.
あるいは、次のような構成により、単一の力覚センサによって故障診断を行うことができる力覚センサを提供することができる。すなわち、前記変形体の各湾曲部は、Z軸負方向に膨出しており、
前記検出回路は、各湾曲部に2つずつ配置された合計8つの変位電極と、これらの変位電極に対向配置され、前記固定部に固定された固定電極と、を有し、
前記変位電極と前記固定電極とは、8組の容量素子を構成し、
前記検出回路は、
前記変形体の各湾曲部に2つずつ配置された容量素子から各1つを選択した合計4つの容量素子の静電容量値の変動量に基づいて、作用した力ないしモーメントを示す第1電気信号を出力し、且つ、残りの各1つを選択した合計4つの容量素子の静電容量値の変動量に基づいて、作用した力ないしモーメントを示す第2電気信号を出力し、
前記第1電気信号及び前記第2電気信号に基づいて、前記力覚センサが正常に機能しているか否かを判定するようになっている。
Alternatively, with the following configuration, it is possible to provide a force sensor capable of performing failure diagnosis with a single force sensor. That is, each curved portion of the deformable body bulges in the Z-axis negative direction,
The detection circuit has a total of eight displacement electrodes, two of which are arranged in each curved portion, and a fixed electrode which is arranged to face these displacement electrodes and is fixed to the fixed portion,
The displacement electrode and the fixed electrode constitute eight sets of capacitive elements,
The detection circuit is
A first electrical device that indicates an applied force or moment based on the amount of change in the capacitance value of a total of four capacitive elements, one of which is selected from two capacitive elements arranged in each curved portion of the deformable body. A signal is output, and a second electric signal indicating an applied force or moment is output based on the amount of change in the capacitance value of the total of four capacitive elements selected from the remaining one.
Based on the first electric signal and the second electric signal, it is determined whether or not the force sensor is functioning normally.
このような力覚センサでは、前記検出回路は、前記第1電気信号と前記第2電気信号との差に基づいて、前記力覚センサが正常に機能しているか否かを判定するようになっていて良い。この場合、作用した力ないしモーメントを検出することができ、且つ、故障診断を行うことができる力覚センサを提供することができる。 In such a force sensor, the detection circuit determines whether or not the force sensor is functioning normally based on the difference between the first electric signal and the second electric signal. You can stay. In this case, it is possible to provide a force sensor that can detect the applied force or moment and can perform failure diagnosis.
あるいは、各湾曲部は、Z軸負方向に膨出しており、第1バネ定数を有する第1湾曲部と前記第1バネ定数とは異なる第2バネ定数を有する第2湾曲部とが前記変形体の周方向に連接されて構成されており、
前記検出回路は、前記第1湾曲部及び前記第2湾曲部に1つずつ配置された合計8つの変位電極と、これらの変位電極に対向配置され、前記固定部に固定された固定電極と、を有し、
各変位電極と前記固定電極とは、8組の容量素子を構成し、
前記検出回路は、
前記第1湾曲部に配置された4つの容量素子の静電容量値の変動量に基づいて、作用した力ないしモーメントを示す第1電気信号を出力し、且つ、前記第2湾曲部に配置された4つの容量素子の静電容量値の変動量に基づいて、作用した力ないしモーメントを示す第2電気信号を出力し、
前記第1電気信号と前記第2電気信号との比率の変化に基づいて、前記力覚センサが正常に機能しているか否かを判定するようになっていて良い。
Alternatively, each bending portion bulges in the Z-axis negative direction, and the first bending portion having a first spring constant and the second bending portion having a second spring constant different from the first spring constant are deformed. It is constructed by connecting in the circumferential direction of the body,
The detection circuit includes a total of eight displacement electrodes arranged one each in the first curved portion and the second curved portion, and fixed electrodes fixed to the fixed portion, arranged in opposition to these displacement electrodes. Have
Each displacement electrode and the fixed electrode constitute eight sets of capacitive elements,
The detection circuit is
A first electric signal indicating the applied force or moment is output based on the amount of change in the capacitance value of the four capacitive elements arranged in the first bending portion, and the first electric signal is arranged in the second bending portion. Based on the amount of change in the capacitance value of the four capacitive elements, a second electric signal indicating the applied force or moment is output,
Whether the force sensor is functioning normally may be determined based on a change in the ratio of the first electric signal and the second electric signal.
具体的には、前記検出回路は、
前記力覚センサが正常に機能している状態における前記第1電気信号と前記第2電気信号との比率を基準比率として記憶しており、
前記第1電気信号と前記第2電気信号との比率と、前記基準比率と、の差、に基づいて前記力覚センサが正常に機能しているか否かを判定するようになっていて良い。
Specifically, the detection circuit is
The ratio between the first electric signal and the second electric signal in a state where the force sensor is functioning normally is stored as a reference ratio,
Whether or not the force sensor is functioning normally may be determined based on a difference between the ratio between the first electric signal and the second electric signal and the reference ratio.
この場合、作用した力ないしモーメントを検出することができ、且つ、変形体に発現した金属疲労による故障をも診断可能な力覚センサを提供することができる。より詳細な故障診断の原理については、後述される。 In this case, it is possible to provide a force sensor that can detect the applied force or moment and can also diagnose a failure due to metal fatigue developed in the deformable body. A more detailed principle of failure diagnosis will be described later.
以上の8つの容量素子を有する力覚センサにおいては、XY平面上に、原点Oを通りX軸およびY軸に対して45°をなすV軸およびW軸を定義した場合に、
XY平面の第1象限に配置された2つの前記変位電極は、正のV軸に関して対称的に配置されており、
XY平面の第2象限に配置された2つの前記変位電極は、正のW軸に関して対称的に配置されており、
XY平面の第3象限に配置された2つの前記変位電極は、負のV軸に関して対称的に配置されており、
XY平面の第4象限に配置された2つの前記変位電極は、負のW軸に関して対称的に配置されていて良い。
In the force sensor having the above eight capacitive elements, when the V axis and the W axis that pass through the origin O and form 45 ° with respect to the X axis and the Y axis are defined on the XY plane,
The two displacement electrodes arranged in the first quadrant of the XY plane are arranged symmetrically with respect to the positive V axis,
The two displacement electrodes arranged in the second quadrant of the XY plane are arranged symmetrically with respect to the positive W axis,
The two displacement electrodes arranged in the third quadrant of the XY plane are arranged symmetrically with respect to the negative V axis,
The two displacement electrodes arranged in the fourth quadrant of the XY plane may be arranged symmetrically with respect to the negative W axis.
この場合、8つの容量素子がX、Y、V、Wの各軸に関して対称的に配置されるため、作用した力ないしモーメントによって各容量素子に生じる静電容量値の変動量も対称的となる。このため、作用した力ないしモーメントの計測が容易である。 In this case, since the eight capacitive elements are symmetrically arranged with respect to the X, Y, V, and W axes, the variation amount of the electrostatic capacitance value generated in each capacitive element due to the acting force or moment is also symmetrical. . Therefore, it is easy to measure the applied force or moment.
あるいは、本発明は、XYZ三次元座標系における各軸方向の力及び各軸まわりのモーメントのうち少なくとも1つを検出する力覚センサであって、
XYZ三次元座標系に対して固定された円形の固定体と、
前記固定体を取り囲むと共に当該固定体に接続され、力ないしモーメントの作用により弾性変形を生じる円環状の変形体と、
前記変形体を取り囲むと共に当該変形体に接続され、力ないしモーメントの作用により前記固定体に対して相対移動する円環状の受力体と、
前記変形体に生じる弾性変形に基づいて、前記受力体に作用した力ないしモーメントを示す電気信号を出力する検出回路と、を備え、
前記固定体、前記変形体及び前記受力体は、互いに同心であるように配置され、
前記受力体のZ軸正側の端面のZ座標値は、前記変形体のZ軸正側の端面のZ座標値よりも大きく、
前記固定体のZ軸負側の端面のZ座標値は、前記変形体のZ軸負側の端面のZ座標値よりも小さく、
前記変形体は、前記固定体に接続された2つの固定部と、前記受力体に接続され、当該変形体の周方向において前記固定部と交互に位置付けられた2つの受力部と、隣接する前記固定部と前記受力部との間に位置付けられた4つの変形部と、を有している。
Alternatively, the present invention is a force sensor that detects at least one of a force in each axial direction and a moment about each axis in an XYZ three-dimensional coordinate system,
A circular fixed body fixed with respect to the XYZ three-dimensional coordinate system,
An annular deformable body that surrounds the fixed body and is connected to the fixed body and elastically deforms by the action of a force or a moment,
An annular force receiving body that surrounds the deformable body and is connected to the deformable body and that moves relative to the fixed body by the action of a force or a moment;
A detection circuit for outputting an electric signal indicating a force or a moment acting on the force receiving body based on elastic deformation of the deformable body,
The fixed body, the deformable body and the force receiving body are arranged so as to be concentric with each other,
The Z coordinate value of the Z axis positive side end surface of the force receiving body is larger than the Z coordinate value of the Z axis positive side end surface of the deformable body,
The Z coordinate value of the end surface of the fixed body on the Z axis negative side is smaller than the Z coordinate value of the end surface of the deformable body on the Z axis negative side,
The deformable body is adjacent to two fixed portions connected to the fixed body, two force receiving portions connected to the force receiving body and alternately positioned with the fixed portion in the circumferential direction of the deformable body. And four deformation portions positioned between the fixed portion and the force receiving portion.
本発明の力覚センサによれば、容量素子を含む起歪体の構造を簡素化することにより、従来よりも安価な静電容量タイプの力覚センサを提供することである。更に、このような力覚センサは、ロボットの関節部分に装着された際に、当該力覚センサが他の部材と干渉することが無い。 According to the force sensor of the present invention, it is possible to provide an electrostatic capacitance type force sensor that is less expensive than conventional ones by simplifying the structure of the strain-generating body including the capacitive element. Furthermore, such a force sensor does not interfere with other members when it is attached to the joint portion of the robot.
各変形部は、Z軸方向に膨出した湾曲部を有し、
前記検出回路は、前記湾曲部に生じる弾性変形に基づいて、前記電気信号を出力するようになっていて良い。
Each deformed portion has a curved portion that bulges in the Z-axis direction,
The detection circuit may output the electric signal based on elastic deformation of the bending portion.
この場合、簡易な構成で、作用した力ないしモーメントによって弾性体にZ軸方向の変位を生じさせることができるため、容量素子を構成する一対の電極の配置が容易である。 In this case, since the elastic body can be displaced in the Z-axis direction by the applied force or moment with a simple structure, it is easy to dispose the pair of electrodes forming the capacitive element.
あるいは、各変形部は、前記変形体の径方向に膨出した湾曲部を有し、
前記検出回路は、前記湾曲部に生じる弾性変形に基づいて、前記電気信号を出力するようになっていても良い。
Alternatively, each deformable portion has a curved portion that bulges in the radial direction of the deformable body,
The detection circuit may output the electric signal based on elastic deformation occurring in the bending portion.
この場合、従来の変形体を用いても、ロボットの関節部分に装着された際に、他の部材と干渉することが無い力覚センサを提供することができる。 In this case, even if the conventional deformable body is used, it is possible to provide a force sensor that does not interfere with other members when attached to the joint portion of the robot.
前記2つの固定部は、Z軸方向から見て、前記変形体がX軸と重なる部位にY軸に関して対称的に配置されており、
前記2つの受力部は、Z軸方向から見て、前記変形体がY軸と重なる部位にX軸に関して対称的に配置されていて良い。
The two fixing portions are arranged symmetrically with respect to the Y axis at a portion where the deformable body overlaps with the X axis when viewed from the Z axis direction,
The two force receiving portions may be arranged symmetrically with respect to the X axis at a portion where the deformable body overlaps with the Y axis when viewed in the Z axis direction.
この場合、作用する力ないしモーメントを変形体に効果的に伝達することができる。 In this case, the acting force or moment can be effectively transmitted to the deformable body.
<<< §1. 本発明の第1の実施の形態による力覚センサ >>>
以下に、添付の図面を参照して、本発明の第1の実施の形態による力覚センサについて詳細に説明する。
<<<< §1. Force sensor according to the first embodiment of the present invention >>
Hereinafter, the force sensor according to the first embodiment of the present invention will be described in detail with reference to the accompanying drawings.
< 1−1. 基本構造 >
図1は、本発明の第1の実施の形態による力覚センサの基本構造1を示す概略斜視図であり、図2は、図1の基本構造1を示す概略平面図であり、図3は、図2の[3]−[3]線断面図である。図2においては、左右方向にX軸が、上下方向にY軸が、奥行き方向にZ軸が、それぞれ定められている。本明細書では、Z軸正方向を上方向と呼び、Z軸負方向を下方向と呼ぶこととする。また、本明細書では、X軸正まわりとは、右ねじをX軸正方向に前進させるために当該右ねじを回転させる回転方向を意味し、X軸負まわりとは、その逆の回転方向を意味することとする。このような回転方向の規定の仕方は、Y軸まわり及びZ軸まわりについても、同様とする。
<1-1. Basic structure>
1 is a schematic perspective view showing a
図1乃至図3に示すように、基本構造1は、XY平面と平行な上面を有する円盤状の固定体10と、力ないしモーメントの作用を受けることにより固定体10に対して相対移動する円盤状の受力体20と、固定体10及び受力体20に接続され、固定体10に対する受力体20の相対移動によって弾性変形を生じる円環状の変形体40と、を備えている。固定体10、受力体20及び変形体40は、互いに同心であり、同一の外径を有している。なお、図2では、変形体40を明確に図示するため、受力体20の図示を省略してある。
As shown in FIGS. 1 to 3, the
本実施の形態による基本構造1は、変形体40と固定体10との間に形成されている間隙の所定位置に容量素子を配置し、この容量素子に所定の検出回路50(図12参照)を接続することにより、力覚センサとして機能することになる。検出回路50は、容量素子の静電容量値の変動量に基づいて、作用した力ないしモーメントを計測するためのものである。容量素子の具体的な配置態様、及び、作用した力ないしモーメントを計測するための具体的な方法は、後述される。
In the
図1及び図2に示すように、変形体40は、全体として、XYZ三次元座標系の原点Oを中心とし、XY平面と平行に配置された円環の形状を有している。ここでは、図3に示すように、変形体40のZ軸方向の厚みの半分の位置にXY平面が存在していることとする。図3に示すように、本実施の形態の変形体40は、正方形の断面形状を有している。変形体40の材質としては、例えば金属が採用され得る。図2に示すように、変形体40は、正のX軸上に位置する第1固定部41と、負のX軸上に位置する第2固定部42と、正のY軸上に位置する第1受力部43と、負のY軸上に位置する第2受力部44と、を有している。後述されるように、各固定部41、42及び各受力部43、44は、変形体40のうち固定体10及び受力体20が接続される領域であって、変形体40の他の領域と異なる特性を有する部位ではない。したがって、各固定部41、42及び各受力部43、44の材質は、変形体40の他の領域と同一である。但し、説明の便宜上、図面においては、変形体40の他の領域とは異なる色で示してある。
As shown in FIGS. 1 and 2, the
図1乃至図3に示すように、変形体40は、更に、第1固定部41と第1受力部43との間(XY平面の第1象限)に位置する第1変形部45と、第1受力部43と第2固定部42との間(XY平面の第2象限)に位置する第2変形部46と、第2固定部42と第2受力部44との間(XY平面の第3象限)に位置する第3変形部47と、第2受力部44と第1固定部41との間(XY平面の第4象限)に位置する第4変形部48と、を有している。各変形部45〜48の両端は、隣接する固定部41、42及び受力部43、44にそれぞれ一体的に連結されている。このような構造によって、受力部43,44に作用した力ないしモーメントが確実に各変形部45〜48に伝達され、これによって、当該作用した力ないしモーメントに応じた弾性変形が各変形部45〜48に生じるようになっている。
As shown in FIGS. 1 to 3, the
図1及び図3に示すように、基本構造1は、固定体10と変形体40とを接続する第1接続部材31及び第2接続部材32と、受力体20と変形体40とを接続する第3接続部材33及び第4接続部材34と、を更に有している。第1接続部材31は、第1固定部41の下面(図3における下方の面)と固定体10の上面とを互いに接続し、第2接続部材32は、第2固定部42の下面と固定体10の上面とを互いに接続している。第3接続部材33は、第1受力部43の上面(図3における上方の面)と受力体20の下面とを互いに接続し、第4接続部材34は、第2受力部44の上面と受力体20の下面とを互いに接続している。各接続部材31〜34は、実質的に剛体とみなせる程度の剛性を有している。このため、受力体20に作用した力ないしモーメントは、効果的に各変形部45〜48に弾性変形を生じさせることになる。
As shown in FIGS. 1 and 3, the
更に、図1及び図3に示すように、変形体40の各変形部45〜48は、Z軸負方向に膨出するように湾曲した湾曲部45c〜48cを有している。図示される例では、各変形部45〜48が全体として湾曲部45c〜48cを形成している。このため、図1乃至図3では、変形部の符号45〜48と湾曲部の符号45c〜48cとを併記してある。このことは、後述される他の実施の形態でも同様である。本実施の形態の変形体40では、図3に示すように、第1湾曲部45cのうち最も下方(Z軸負方向)に位置する部位が、第1固定部41から変形体40の周方向に沿って反時計回りに45°だけ周回した位置に存在している。そして、第1湾曲部45cの、第1固定部41から前記最も下方に位置する部位第に至るまでの形状は、第1受力部43から前記最も下方に位置する部位に至るまでの形状と同一である。換言すれば、第1湾曲部45cは、変形体40の周方向において、前記最も下方に位置する部位に関して対称的な形状を有している。
Further, as shown in FIGS. 1 and 3, each of the
このことは、残りの3つの湾曲部46c、47c、48cにおいても、同様である。すなわち、第2湾曲部46cは、最も下方に位置する部位が第1受力部43から変形体40の周方向に沿って反時計回りに45°だけ周回した位置に存在しており、且つ、変形体40の周方向においてこの最も下方に位置する部位に関して対称的な形状を有している。第3湾曲部47cは、最も下方に位置する部位が第2固定部42から変形体40の周方向に沿って反時計回りに45°だけ周回した位置に存在しており、且つ、変形体40の周方向においてこの最も下方に位置する部位に関して対称的な形状を有している。第4湾曲部48cは、最も下方に位置する部位が第2受力部44から変形体40の周方向に沿って反時計回りに45°だけ周回した位置に存在しており、変形体40の周方向においてこの最も下方に位置する部位に関して対称的な形状を有している。
This also applies to the remaining three
結局、図2に示すように、XY平面上に、原点Oを通りX軸およびY軸に対して45°をなすV軸およびW軸を定義すると、第1湾曲部45cは、正のV軸に関して対称的であり、第2湾曲部46cは、正のW軸に関して対称的であり、第3湾曲部47cは、負のV軸に関して対称的であり、第4湾曲部48cは、負のW軸に関して対称的である。
After all, as shown in FIG. 2, if the V axis and the W axis that pass through the origin O and form 45 ° with respect to the X axis and the Y axis are defined on the XY plane, the
図2及び図3に示すように、基本構造1には、各湾曲部45c〜48cの最も下方に位置する部位に、すなわちZ軸方向から見て各湾曲部45c〜48cがV軸及びW軸と重なる部位に、当該各湾曲部45c〜48cに生じる弾性変形を検出するための検出部位A1〜A4が規定されている。なお、図2では、検出部位A1〜A4が変形体40の上面(手前側の面)に設けられているように示されているが、実際は、変形体40の下面(奥側の面)に設けられている(図3参照)。
As shown in FIG. 2 and FIG. 3, in the
< 1−2. 基本構造の作用 >
次に、このような基本構造1の作用について説明する。
<1-2. Action of basic structure >
Next, the operation of the
(1−2−1. 基本構造1にX軸まわりのモーメントMxが作用した場合)
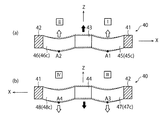
図4は、図1の基本構造1に対してX軸正まわりのモーメント+Mxが作用したときに、各湾曲部45c〜48cに生じる弾性変形を説明するための概略平面図である。また、図5は、図4の概略断面図である。図5(a)は、図4の[5a]−[5a]線断面図であり、図5(b)は、図4の[5b]−[5b]線断面図である。なお、図4及び図5において、黒塗りの太い矢印は、作用する力ないしモーメントを示しており、白抜きの太い矢印は、検出部位A1〜A4の変位の方向を示している。このことは、他の図においても同様である。
(1-2-1. When the moment Mx about the X axis acts on the basic structure 1)
FIG. 4 is a schematic plan view for explaining elastic deformation that occurs in each of the bending
図4に示すように、受力体20(図1及び図3参照)を介して基本構造1にX軸正まわりのモーメント+Mxが作用すると、変形体40の第1受力部43に対してZ軸正方向(図5(a)における上方向)の力が作用し、第2受力部44に対してZ軸負方向(図5(b)における下方向)の力が作用する。図4において、第1受力部43に付されている、黒点を丸で囲んだ記号は、Z軸負方向からZ軸正方向に向かって力が作用することを示しており、第2受力部44に付されている、×印を丸で囲んだ記号は、Z軸正方向からZ軸負方向に向かって力が作用することを示している。これらの記号の意味は、図6、図8及び図10においても同様である。
As shown in FIG. 4, when the moment + Mx about the positive X axis acts on the
このとき、図5(a)及び図5(b)に示すように、第1〜第4湾曲部45c〜48cには次のような弾性変形が生じる。すなわち、第1受力部43に作用するZ軸正方向の力によって当該第1受力部43が上方に移動するため、第1湾曲部45c及び第2湾曲部46cのうち第1受力部43に連結されている端部が上方に移動させられる。これにより、図5(a)に示すように、第1湾曲部45c及び第2湾曲部46cは、第1及び第2固定部41、42に連結されている端部を除き、全体的に上方に移動する。すなわち、第1検出部位A1及び第2検出部位A2は、共に上方に移動する。他方、第2受力部44に作用するZ軸負方向の力によって当該第2受力部44が下方に移動するため、第3湾曲部47c及び第4湾曲部48cのうち第2受力部44に連結されている端部が下方に移動させられる。これにより、図5(b)に示すように、第3湾曲部47c及び第4湾曲部48cは、第1及び第2固定部41、42に連結されている端部を除き、全体的に下方に移動する。すなわち、第3検出部位A3及び第4検出部位A4は、共に下方に移動する。
At this time, as shown in FIGS. 5A and 5B, the following elastic deformation occurs in the first to
このような移動は、図4においては、各検出部位A1〜A4の位置に、丸で囲んだ「+」または「−」の記号を付して表されている。すなわち、丸で囲んだ「+」の記号が付された検出部位は、湾曲部の弾性変形によってZ軸正方向に変位し、丸で囲んだ「−」の記号が付された検出部位は、湾曲部の弾性変形によってZ軸負方向に変位する。このことは、図6、図8及び図10においても同様である。 Such movement is shown in FIG. 4 by adding a circled symbol “+” or “−” to the positions of the detection sites A1 to A4. That is, the detection part surrounded by a circle and marked "+" is displaced in the Z-axis positive direction by the elastic deformation of the curved portion, and the detection part surrounded by a circle and marked "-" is It is displaced in the negative direction of the Z-axis due to the elastic deformation of the curved portion. This also applies to FIGS. 6, 8 and 10.
結局、基本構造1の受力体20に対してX軸正まわりのモーメント+Mxが作用すると、第1及び第2検出部位A1、A2と固定体10(図3参照)の上面との離間距離は、共に増大し、第3及び第4検出部位A3、A4と固定体10の上面との離間距離は、共に減少する。
After all, when the moment + Mx about the X-axis is applied to the
図示されていないが、基本構造1の受力体20にX軸負まわりのモーメント−Mxが作用した場合には、各検出部位A1〜A4の移動方向は、上述した方向とは逆になる。すなわち、X軸負まわりのモーメント−Mxの作用によって、第1及び第2検出部位A1、A2と固定体10(図2参照)の上面との離間距離は、共に減少し、第3及び第4検出部位A3、A4と固定体10の上面との離間距離は、共に増大する。
Although not shown, when the negative force X-axis moment −Mx acts on the
(1−2−2. 基本構造1にY軸まわりのモーメントMyが作用した場合)
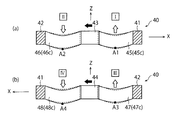
図6は、図1の基本構造1に対してY軸正まわりのモーメント+Myが作用したときに、各湾曲部45c〜48cに生じる弾性変形を説明するための概略平面図である。また、図7は、図6の概略断面図である。図7(a)は、図6の[7a]−[7a]線断面図であり、図7(b)は、図6の[7b]−[7b]線断面図である。
(1-2-2. When the moment My about the Y axis acts on the basic structure 1)
FIG. 6 is a schematic plan view for explaining elastic deformation that occurs in each of the bending
図6及び図7に示すように、受力体20(図1及び図3参照)を介して基本構造1に対してY軸正まわりのモーメント+Myが作用すると、変形体40の第1及び第2受力部43、44のX軸負側の領域にはZ軸正方向の力が作用し、第1及び第2受力部43、44のX軸正側の領域にはZ軸負方向の力が作用する。
As shown in FIGS. 6 and 7, when the moment + My about the Y axis in the normal direction acts on the
このとき、図7(a)及び図7(b)に示すように、第1〜第4湾曲部45c〜48cには次のような弾性変形が生じる。すなわち、第1受力部43のX軸正側(図7(a)における右側)に作用するZ軸負方向の力によって当該X軸正側の領域が下方に移動するため、第1湾曲部45cのうち第1受力部43に連結されている端部が下方に移動させられる。これにより、図7(a)に示すように、第1湾曲部45cは、第1固定部41に連結されている端部を除き、全体的に下方に移動する。すなわち、第1検出部位A1は、下方に移動する。他方、第1受力部43のX軸負側(図7(a)における左側)に作用するZ軸正方向の力によって当該X軸負側の領域が上方に移動するため、第2湾曲部46cのうち第1受力部43に連結されている端部が上方に移動する。これにより、図7(a)に示すように、第2湾曲部46cは、第2固定部42に連結されている端部を除き、全体的に上方に移動する。すなわち、第2検出部位A2は、上方に移動する。
At this time, as shown in FIGS. 7A and 7B, the following elastic deformation occurs in the first to
また、図7(b)に示すように、第2受力部44のX軸負側(図7(b)における右側)に作用するZ軸正方向の力によって当該X軸負側の領域が上方に移動するため、第3湾曲部47cのうち第2受力部44に連結されている端部が上方に移動させられる。これにより、図7(b)に示すように、第3湾曲部47cは、第2固定部42に連結されている端部を除き、全体的に上方に移動する。すなわち、第3検出部位A3は、上方に移動する。
Further, as shown in FIG. 7B, the region on the X-axis negative side is caused by the force in the Z-axis positive direction acting on the X-axis negative side of the second force receiving portion 44 (right side in FIG. 7B). Since it moves upward, the end portion of the
他方、図7(b)に示すように、第2受力部44のX軸正側(図7(b)における左側)に作用するZ軸負方向の力によって当該X軸正側の領域が下方に移動するため、第4湾曲部48cのうち第2受力部44に連結されている端部が下方に移動させられる。これにより、図7(b)に示すように、第4湾曲部48cは、第1固定部41に連結されている端部を除き、全体的に下方に移動する。すなわち、第4検出部位A4は、下方に移動する。
On the other hand, as shown in FIG. 7B, the area on the X-axis positive side is caused by the Z-axis negative direction force acting on the X-axis positive side (left side in FIG. 7B) of the second
結局、基本構造1の受力体20に対してY軸正まわりのモーメント+Myが作用すると、第1及び第4検出部位A1、A4と固定体10(図3参照)の上面との離間距離は、共に減少し、第2及び第3検出部位A2、A3と固定体10の上面との離間距離は、共に増大する。
After all, when the moment + My about the Y axis in the normal direction acts on the
図示されていないが、基本構造1の受力体20にY軸負まわりのモーメント−Myが作用した場合には、各検出部位A1〜A4の移動方向は、上述した方向とは逆になる。すなわち、Y軸負まわりのモーメント−Myの作用によって、第1及び第4検出部位A1、A4と固定体10(図3参照)の上面との離間距離は、共に増大し、第2及び第3検出部位A2、A3と固定体10の上面との離間距離は、共に減少する。
Although not shown, when the negative force Y about the Y axis acts on the
(1−2−3. 基本構造1にZ軸まわりのモーメントMzが作用した場合)
図8は、図1の基本構造1に対してZ軸正まわりのモーメント+Mzが作用したときに、各湾曲部45c〜48cに生じる弾性変形を説明するための概略平面図である。また、図9は、図8の概略断面図である。図9(a)は、図8の[9a]−[9a]線断面図であり、図9(b)は、図8の[9b]−[9b]線断面図である。
(1-2-3. When the moment Mz about the Z axis acts on the basic structure 1)
FIG. 8 is a schematic plan view for explaining elastic deformation that occurs in each of the bending
図8に示すように、受力体20(図1及び図3参照)を介して基本構造1に対してZ軸正まわりのモーメント+Mzが作用すると、変形体40の第1受力部43に対してX軸負方向(図8における左方向)の力が作用し、第2受力部44に対してX軸正方向(図8における右方向)の力が作用する。
As shown in FIG. 8, when a moment + Mz about the Z-axis is applied to the
このとき、図9(a)及び図9(b)に示すように、第1〜第4湾曲部45c〜48cには次のような弾性変形が生じる。すなわち、第1受力部43に作用するX軸負方向の力によって当該第1受力部43がX軸負方向に移動するため、第1湾曲部45cには、X軸方向に沿った引張力が作用する。これにより、第1湾曲部45cは、その両端部のZ座標値を維持したまま曲率半径が大きくなるように弾性変形する。すなわち、第1検出部位A1は、上方に移動する。他方、第1受力部43がX軸負方向に移動することにより、第2湾曲部46cには、X軸方向に沿った圧縮力が作用する。これにより、第2湾曲部46cは、その両端部のZ座標値を維持したまま曲率半径が小さくなるように弾性変形する。すなわち、第2検出部位A2は、下方に移動する。
At this time, as shown in FIGS. 9A and 9B, the following elastic deformation occurs in the first to
また第2受力部44に作用するX軸正方向の力によって当該第2受力部44がX軸正方向に移動するため、第3湾曲部47cには、X軸方向に沿った引張力が作用する。これにより、第3湾曲部47cは、その両端部のZ座標値を維持したまま曲率半径が大きくなるように弾性変形する。すなわち、第3検出部位A3は、上方に移動する。他方、第2受力部44がX軸正方向に移動することにより、第4湾曲部48cには、X軸方向に沿った圧縮力が作用する。これにより、第4湾曲部48cは、その両端部のZ座標値を維持したまま曲率半径が小さくなるように弾性変形する。すなわち、第4検出部位A4は、下方に移動する。
Further, since the second
結局、基本構造1の受力体20に対してZ軸正まわりのモーメント+Mzが作用すると、第1及び第3検出部位A1、A3と固定体10の上面との離間距離は、共に増大し、第2及び第4検出部位A2、A4と固定体10(図2参照)の上面との離間距離は、共に減少する。
Eventually, when the moment + Mz about the Z-axis is applied to the
図示されていないが、基本構造1の受力体20にZ軸負まわりのモーメント−Mzが作用した場合には、各検出部位A1〜A4の移動方向は、上述した方向とは逆になる。すなわち、Z軸負まわりのモーメント−Mzの作用によって、第1及び第3検出部位A1、A3と固定体10の上面との離間距離は、共に減少し、第2及び第4検出部位A2、A4と固定体10(図2参照)の上面との離間距離は、共に増大する。
Although not shown, when the negative force about the Z-axis -Mz acts on the
(1−2−4. 基本構造1にZ方向の力Fzが作用した場合)
次に、図10は、図1の基本構造1に対してZ軸正方向の力+Fzが作用したときに、各湾曲部45c〜48cに生じる弾性変形を説明するための概略平面図である。また、図11は、図10の概略断面図である。図11(a)は、図10の[11a]−[11a]線断面図であり、図11(b)は、図10の[11b]−[11b]線断面図である。
(1-2-4. When the force Fz in the Z direction acts on the basic structure 1)
Next, FIG. 10 is a schematic plan view for explaining elastic deformation that occurs in each of the bending
図10及び図11に示すように、受力体20(図1及び図3参照)を介して基本構造1に対してZ軸正方向の力+Fzが作用すると、変形体40の第1及び第2受力部43、44にはZ軸正方向の力が作用する。
As shown in FIGS. 10 and 11, when the force + Fz in the Z-axis positive direction acts on the
このとき、図11(a)及び図11(b)に示すように、第1〜第4各湾曲部45c〜48cには次のような弾性変形が生じる。すなわち、第1及び第2受力部43、44に作用するZ軸正方向の力によって各受力部43、44が上方に移動するため、各湾曲部45c〜48cのうち第1及び第2受力部43、44に連結されている各端部が上方に移動させられる。これにより、図11(a)及び図11(b)に示すように、各検出部位A1〜A4は、上方に移動する。
At this time, as shown in FIGS. 11A and 11B, the following elastic deformation occurs in the first to fourth
結局、基本構造1の受力体20に対してZ軸正方向の力+Fzが作用すると、第1〜第4検出部位A1〜A4と固定体10(図2参照)の上面との離間距離は、全て増大する。
After all, when the force + Fz in the Z-axis positive direction acts on the
図示されていないが、基本構造1の受力体20にZ軸負方向の力−Fzが作用した場合には、各検出部位A1〜A4の移動方向は、上述した方向とは逆になる。すなわち、Z軸負方向の力−Fzの作用によって、第1〜第4検出部位A1〜A4と固定体10(図2参照)の上面との離間距離は、全て減少する。
Although not shown, when a force −Fz in the negative Z-axis direction acts on the
< 1−3. 容量素子型の力覚センサ >
(1−3−1. 力覚センサの構成)
§1−1.及び§1−2.において詳述した基本構造1は、容量素子型の力覚センサ1cとして好適に使用することができる。ここでは、このような力覚センサ1cについて、以下詳細に説明する。
<1-3. Capacitive element type force sensor >
(1-3-1. Structure of force sensor)
§1-1. And §1-2. The
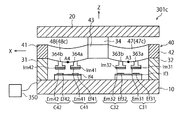
図12は、図1の基本構造1を利用した力覚センサ1cを示す概略平面図であり、図13は、図12の[13]−[13]線断面図である。なお、図13では、変形体40を明確に図示するため、受力体20の図示を省略してある。
12 is a schematic plan view showing a
図12及び図13に示すように、力覚センサ1cは、図1の基本構造1の検出部位A1〜A4に、各1つの容量素子C1〜C4が配置されることにより、構成されている。具体的には、図13に示すように、力覚センサ1cは、第1検出部位A1に配置された第1変位電極Em1と、第1変位電極Em1に対向して配置され、固定体10に対して相対移動しない第1固定電極Ef1と、を有している。これらの電極Em1、Ef1は、第1容量素子C1を構成している。更に、図13に示すように、力覚センサ1cは、第2検出部位A2に配置された第2変位電極Em2と、第2変位電極Em2に対向して配置され、固定体10に対して相対移動しない第2固定電極Ef2と、を有している。これらの電極Em2、Ef2は、第2容量素子C2を構成している。
As shown in FIGS. 12 and 13, the
図示されていないが、力覚センサ1cは、第3検出部位A3に配置された第3変位電極Em3と、第3変位電極Em3に対向して配置され、固定体10に対して相対移動しない第3固定電極Ef3と、第4検出部位A4に配置された第4変位電極Em4と、第4変位電極Em4に対向して配置され、固定体10に対して相対移動しない第4固定電極Ef4と、を有している。電極Em3及び電極Ef3は、第3容量素子C3を構成しており、電極Em4及び電極Ef4は、第4容量素子C4を構成している。
Although not shown, the
図13から理解されるように、各変位電極Em1〜Em4は、対応する検出部位A1〜A4に支持された第1〜第4変形体側支持体61〜64の下面に、第1〜第4変位基板Im1〜Im4を介して支持されている。更に、各固定電極Ef1〜Ef4は、固定体10の上面に固定された固定体側支持体71〜74の上面に、第1〜第4固定基板If1〜If4を介して支持されている。各変位電極Em1〜Em4は、全て同一の面積であり、各固定電極Ef1〜Ef4も、全て同一の面積である。但し、力ないしモーメントの作用によって各容量素子C1〜C4の実効対向面積が一定の値を維持するようにするための工夫として、変位電極Em1〜Em4の電極面積は、固定電極Ef1〜Ef4の電極面積よりも大きく構成されている。この点については、後に詳述される。初期状態において、容量素子C1〜C4を構成する各1組の電極の実効対向面積及び離間距離は、全て同一である。
As can be understood from FIG. 13, the displacement electrodes Em1 to Em4 have the first to fourth displacements on the lower surfaces of the first to fourth deformable body side supports 61 to 64 supported by the corresponding detection sites A1 to A4. It is supported via the substrates Im1 to Im4. Further, each of the fixed electrodes Ef1 to Ef4 is supported on the upper surfaces of the fixed body
更に、図12及び図13に示すように、力覚センサ1cは、変形体40の各湾曲部45c〜48cに生じる弾性変形に基づいて、受力体20に作用した力ないしモーメントを示す電気信号を出力する検出回路50を有している。図12及び図13では、各容量素子C1〜C4と検出回路50とを電気的に接続する配線は、図示が省略されている。
Further, as shown in FIGS. 12 and 13, the
固定体10、受力体20及び変形体40が金属などの導電材料で構成されている場合、各電極がショートしないように、第1〜第4変位基板Im1〜Im4及び第1〜第4固定基板If1〜If4は、絶縁体で構成される必要がある。
When the fixed
(1−3−2. 力覚センサ1cにX軸まわりのモーメントMxが作用したときの、各容量素子の静電容量値の変動について)
次に、図14は、図12の力覚センサ1cに対して、力ないしモーメントが作用した時に各容量素子C1〜C4に生じる静電容量値の変動を示す図表である。
(1-3-2. Regarding fluctuation of electrostatic capacitance value of each capacitive element when moment Mx about X axis acts on
Next, FIG. 14 is a chart showing variations in the capacitance value generated in each of the capacitive elements C1 to C4 when a force or moment acts on the
まず、本実施の形態による力覚センサ1cに対して、X軸正まわりのモーメント+Mxが作用すると、§1−2−1にて説明した各検出部位A1〜A4の挙動から理解されるように、第1容量素子C1及び第2容量素子C2を構成する電極間の離間距離が、共に増大する。このため、第1容量素子C1及び第2容量素子C2の静電容量値は、共に減少する。他方、第3容量素子C3及び第4容量素子C4を構成する電極間の離間距離は、共に減少する。このため、第3容量素子C3及び第4容量素子C4の静電容量値は、共に増大する。各容量素子C1〜C4の静電容量値の変動は、図14の「Mx」の欄に纏めて示されている。この図表において、「+」は、静電容量値が増大することを示しており、「−」は、静電容量値が減少することを示している。なお、力覚センサ1cにX軸負まわりのモーメント−Mxが作用すると、各容量素子C1〜C4の静電容量値の変動は、上述した変動とは逆になる(図14のMxの欄に示す符号が全て逆になる)。
First, when the moment + Mx about the X-axis is applied to the
(1−3−3. 力覚センサ1cにY軸まわりのモーメントMyが作用したときの、各容量素子の静電容量値の変動について)
次に、本実施の形態による力覚センサ1cに対して、Y軸正まわりのモーメント+Myが作用すると、§1−2−2にて説明した各検出部位A1〜A4の挙動から理解されるように、第1容量素子C1及び第4容量素子C4を構成する電極間の離間距離が、共に減少する。このため、第1容量素子C1及び第4容量素子C4の静電容量値は、共に増大する。他方、第2容量素子C2及び第3容量素子C3を構成する電極間の離間距離は、共に増大する。このため、第2容量素子C2及び第3容量素子C3の静電容量値は、共に減少する。各容量素子C1〜C4の静電容量値の変動は、図14の「My」の欄に纏めて示されている。なお、力覚センサ1cにY軸負まわりのモーメント−Myが作用すると、各容量素子C1〜C4の静電容量値の変動は、上述した変動とは逆になる(図14のMyの欄に示す符号が全て逆になる)。
(1-3-3. Regarding Variation of Capacitance Value of Each Capacitance Element when Moment My about Y Axis Acts on
Next, when a moment + My around the Y axis acts on the
(1−3−4. 力覚センサ1cにZ軸まわりのモーメントMzが作用したときの、各容量素子の静電容量値の変動について)
次に、本実施の形態による力覚センサ1cに対して、Z軸正まわりのモーメント+Mzが作用すると、§1−2−3にて説明した各検出部位A1〜A4の挙動から理解されるように、第1容量素子C1及び第3容量素子C3を構成する電極間の離間距離は、共に増大する。このため、第1容量素子C1及び第3容量素子C3の静電容量値は、共に減少する。他方、第2容量素子C2及び第4容量素子C4を構成する電極間の離間距離は、共に減少する。このため、第2容量素子C2及び第4容量素子C4の静電容量値は、共に増大する。各容量素子C1〜C4の静電容量値の変動は、図14の「Mz」の欄に纏めて示されている。なお、力覚センサ1cにZ軸負まわりのモーメント−Mzが作用すると、各容量素子C1〜C4の静電容量値の変動は、上述した変動とは逆になる(図14のMzの欄に示す符号が全て逆になる)。
(1-3-4. Regarding fluctuation of capacitance value of each capacitance element when moment Mz about Z axis acts on
Next, when the moment + Mz about the Z-axis is applied to the
(1−3−5. 力覚センサ1cにZ軸方向の力Fzが作用したときの、各容量素子の静電容量値の変動について)
次に、本実施の形態による力覚センサ1cに対して、Z軸正方向の力+Fzが作用すると、§1−2−4にて説明した各検出部位A1〜A4の挙動から理解されるように、各容量素子C1〜C4を構成する電極間の離間距離は、全て増大する。このため、容量素子C1〜C4の静電容量値は、全て減少する。各容量素子C1〜C4の静電容量値の変動は、図14の「Fz」の欄に纏めて示されている。なお、力覚センサ1cにZ軸負方向の力−Fzが作用すると、各容量素子C1〜C4の静電容量値の変動は、上述した変動とは逆になる(図14のFzの欄に示す符号が全て逆になる)。
(1-3-5. Regarding fluctuation of electrostatic capacitance value of each capacitive element when force Fz in the Z-axis direction acts on the
Next, when the force + Fz in the Z-axis positive direction acts on the
(1−3−6. 作用した力ないしモーメントの算出方法)
以上のような容量素子C1〜C4の静電容量値の変動に鑑み、検出回路50は、次の[式1]を用いて力覚センサ1cに作用したモーメントMx、My、Mz及び力Fzを算出する。[式1]において、C1〜C4は、第1〜第4容量素子C1〜C4の静電容量値の変動量を示している。
[式1]
Mx=−C1−C2+C3+C4
My=C1−C2−C3+C4
Mz=−C1+C2−C3+C4
Fz=−(C1+C2+C3+C4)
なお、力覚センサ1cに作用した力ないしモーメントが負方向である場合には、左辺のMx、My、Mz及びFzに代えて、−Mx、−My、−Mz及び−Fzとすれば良い。
(1-3-6. Method of calculating applied force or moment)
In consideration of the fluctuations in the capacitance values of the capacitive elements C1 to C4 as described above, the
[Formula 1]
Mx = -C1-C2 + C3 + C4
My = C1-C2-C3 + C4
Mz = -C1 + C2-C3 + C4
Fz =-(C1 + C2 + C3 + C4)
When the force or moment acting on the
以上のような本実施の形態による力覚センサ1cによれば、Z軸方向に膨出した湾曲部45c〜48cを有する簡素な変形体40によって、検出部位A1〜A4において、作用した力ないしモーメントに対応する変位をZ軸方向に生じさせることができる。このため、容量素子C1〜C4を構成する一対の電極のうち一方を検出部位A1〜A4に、他方を例えば固定体10の上面に、それぞれ配置して良いため、容量素子C1〜C4を構成することが容易である。したがって、本実施の形態によれば、このような簡素な構造が採用されていることにより、従来よりも安価な静電容量タイプの力覚センサ1cを提供することができる。
According to the
力覚センサ1cでは、XY平面上に原点Oを通りX軸およびY軸に対して45°をなすV軸およびW軸を定義した場合に、4組の容量素子C1〜C4が、Z軸方向から見てV軸及びW軸に重なる4つの部位に1つずつ配置されている。したがって、容量素子C1〜C4がX軸及びY軸に関して対称的に配置されているため、高い対称性をもって各容量素子C1〜C4の静電容量値が変動することになる。このため、容量素子C1〜C4の静電容量値の変動量に基づいて、作用した力ないしモーメントを極めて容易に計測することができる。
In the
以上の説明においては、4つの容量素子C1〜C4は、個別の固定基板If1〜If4及び個別の固定電極Ef1〜Ef4を有していた。しかしながら、他の実施の形態においては、固定基板を4つの容量素子で共通となるように構成し、その固定基板上に個別の固定電極を設けても良い。あるいは、固定基板及び固定電極を4つの容量素子で共通となるように構成しても良い。これらのような構成によっても、前述した力覚センサ1cと同様にして、力ないしモーメントを計測することができる。なお、これらの構成は、後述される各実施の形態に対しても適用可能である。
In the above description, the four capacitive elements C1 to C4 have the individual fixed substrates If1 to If4 and the individual fixed electrodes Ef1 to Ef4. However, in another embodiment, the fixed substrate may be configured to be common to the four capacitive elements, and individual fixed electrodes may be provided on the fixed substrate. Alternatively, the fixed substrate and the fixed electrode may be shared by the four capacitive elements. With such a configuration, the force or moment can be measured in the same manner as the
また、力覚センサ1cは、変形体40の断面形状が変更されることにより、作用する力ないしモーメントに対する感度が変化する。具体的には、次の通りである。すなわち、本実施の形態では、変形体40の断面形状が正方形であった(図3参照)が、この断面形状を、Z軸方向に長い縦長の長方形にすると、X、Y軸まわりのモーメントMx、My及びZ軸方向の力Fzに対する感度が、Z軸まわりのモーメントMzに対する感度よりも相対的に低くなる。その一方、変形体40の断面形状を、当該変形体40の径方向に長い横長の長方形にすると、先の場合とは逆に、X、Y軸まわりのモーメントMx、My及びZ軸方向の力Fzに対する感度が、Z軸まわりのモーメントMzに対する感度よりも相対的に高くなる。
Further, the
あるいは、力覚センサ1cは、湾曲部45c〜48cの曲率半径(湾曲の度合い)が変更されることによっても、作用する力ないしモーメントに対する感度が変化する。具体的には、湾曲部45c〜48cの曲率半径が小さくされると(湾曲の度合いが大きくされると)、作用する力ないしモーメントに対する感度が高くなる。その一方、湾曲部45c〜48cの曲率半径が大きくされると(湾曲の度合いが小さくされると)、作用する力ないしモーメントに対する感度が低くなる。
Alternatively, in the
以上のような変形体40の断面形状及び湾曲部45c〜48cの曲率半径と、力ないしモーメントに対する感度と、の関係を考慮することにより、力覚センサ1cの感度を使用される環境において最適化することができる。もちろん、以上の説明は、後述される各実施の形態においても同様に当てはまる。
The sensitivity of the
<<< §2. 本発明の第2の実施の形態による力覚センサ >>>
< 2−1. 構成>
次に、本発明の第2の実施の形態による力覚センサ201cについて説明する。
<<<< §2. Force sensor according to a second embodiment of the present invention >>>
<2-1. Composition>
Next, the
図15は、第2の実施の形態による力覚センサ201cの概略平面図である。また、図16は、図15の[16]−[16]線断面図であり、図17は、図15の[17]−[17]線断面図である。但し、図15では、図面の見やすさのため、受力体20の図示を省略してある。
FIG. 15 is a schematic plan view of the
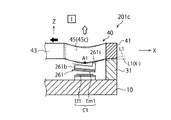
図15乃至図17に示すように、力覚センサ201cは、次の点で、第1の実施の形態による力覚センサ1cとは異なる。すなわち、本実施の形態による力覚センサ201cでは、変位電極Em1〜Em4を支持する変形体側支持体261〜264が、各湾曲部45c〜48cの検出部位A1〜A4とは異なる部位において当該各湾曲部45c〜48cに接続されている。具体的には、図15及び図16に示すように、第1湾曲部45cに接続されている第1変形体側支持体261は、Z軸方向から見て、第1湾曲部45cの第1検出部位A1に重なるように配置された第1梁261bと、この第1梁261bのうち第1固定部41側(図16における右側)の端部を第1湾曲部45cに接続する第1接続体261sと、を有する片持ち梁構造体となっている。第1接続体261sは、Z軸と平行に延在しているため、当該第1接続体261sと第1湾曲部45cとの接続位置は、第1検出部位A1よりも第1固定部41側である。第1変位電極Em1は、この片持ち梁構造体の第1梁261bの下面に変位基板を介して支持されている。
As shown in FIGS. 15 to 17, the
また、第2湾曲部46cに接続されている第2変形体側支持体262も、片持ち梁構造体として構成されている。すなわち、図15及び図16に示すように、第2変形体側支持体262は、Z軸方向から見て、第2湾曲部46cの第2検出部位A2に重なるように配置された第2梁262bと、この第2梁262bのうち第2固定部42側(図16における左側)の端部を第2湾曲部46cに接続する第2接続体262sと、を有する片持ち梁構造体となっている。第2接続体262sは、Z軸と平行に延在しているため、当該第2接続体262sと第2湾曲部46cとの接続位置は、第2検出部位A2よりも第2固定部42側である。第2変位電極Em2は、この片持ち梁構造体の第2梁262bの下面に変位基板を介して支持されている。
Further, the second deformable body
更に、第3変形体側支持体263及び第4変形体側支持体264も、同様の片持ち梁構造体として構成されている。すなわち、図15及び図17に示すように、第3変形体側支持体263は、Z軸方向から見て、第3湾曲部47cの第3検出部位A3に重なるように配置された第3梁263bと、この第3梁263bのうち第2固定部42側(図17における右側)の端部を第3湾曲部47cに接続する第3接続体263sと、を有する片持ち梁構造体となっている。第3接続体263sは、Z軸と平行に延在しているため、第3接続体263と第3湾曲部47cとの接続位置は、第3検出部位A3よりも第2固定部42側である。第3変位電極Em3は、第3梁263bの下面に変位基板を介して支持されている。
Furthermore, the third deformable body side support body 263 and the fourth deformable body
また、第4変形体側支持体264は、Z軸方向から見て、第4湾曲部48cの第4検出部位A4に重なるように配置された第4梁264bと、この第4梁264bのうち第1固定部41側(図17における左側)の端部を第4湾曲部48cに接続する第4接続体264sと、を有する片持ち梁構造体となっている。第4接続体264sは、Z軸と平行に延在しているため、第4接続体264sと第4湾曲部48cとの接続位置は、第4検出部位A4よりも第1固定部41側である。第4変位電極Em34は、第4梁264bの下面に変位基板を介して支持されている。
Further, the fourth deformable body
以上のような構成によって、各接続体261s〜264sは、検出部位A1〜A4とは異なる部位において湾曲部45c〜48cに接続されていながら、Z軸方向から見て、第1〜第4変位電極Em1〜Em4が対応する検出部位A1〜A4と重なるように配置されている。
With the configuration as described above, each of the
なお、図15乃至図25に示されている例では、以上のように、各変形体側支持体261〜264は、片持ち梁構造体として構成されているが、他の実施の形態(不図示)では、梁261b〜264bの先端が可撓性を有する材料によって固定体10に連結された、両持ち梁構造体として構成されても良い。可撓性を有する材料は、直線状の形状でも湾曲した形状でも良く、例えばZ軸と固定体10の上面とが交わる部位の近傍にて、当該固定体10に接続され得る。このような構成によれば、力覚センサ201cに作用する力ないしモーメントの作用によって生じる梁261b〜264bの傾斜の挙動を外部振動から安定化させることができる。
Note that, in the example shown in FIGS. 15 to 25, as described above, each of the deformable body side supports 261 to 264 is configured as a cantilever structure, but other embodiments (not shown). In (), the ends of the
< 2−2. 作用>
(2−2−1. 第1容量素子C1の静電容量値の変動)
本実施の形態による力覚センサ201cに対して力ないしモーメントが作用したときに、各容量素子C1〜C4に生じる静電容量値の変動について検討する。ここでは、まず第1容量素子C1の静電容量値の変動について、図18乃至図21を参照して説明する。
<2-2. Action>
(2-2-1. Variation in capacitance value of the first capacitive element C1)
The fluctuation of the electrostatic capacitance value generated in each of the capacitive elements C1 to C4 when a force or moment acts on the
図18は、図15に示す力覚センサの第1受力部43に対してX軸負方向の力が作用したときの第1容量素子C1を示す概略断面図であり、図19は、図15に示す力覚センサ201cの第1受力部43に対してX軸正方向の力が作用したときの第1容量素子C1を示す部分的な概略断面図である。また、図20は、図15に示す力覚センサ201cの第1受力部43に対してZ軸正方向の力が作用したときの第1容量素子C1を示す部分的な概略断面図であり、図21は、図15に示す力覚センサ201cの第1受力部43に対してZ軸負方向の力が作用したときの第1容量素子C1を示す部分的な概略断面図である。
18 is a schematic cross-sectional view showing the first capacitive element C1 when a force in the negative direction of the X-axis acts on the first
図18に示すように、第1受力部43に対してX軸負方向(図18における左方向)の力が作用すると、第1受力部43は、当該方向に移動する。これに伴って、第1湾曲部45cは、X軸方向に沿った引張力を受けるため、その曲率半径が大きくなるように弾性変形する。図18において、初期状態の第1湾曲部45cが破線で示されており、弾性変形している状態の第1湾曲部45cが実線で示されている。図18に示すように、この弾性変形によって、第1湾曲部45cのうち第1接続体261sが接続されている部位の接線L1がより水平に寝た状態に変化する。図18において、変化後の接線は、L1(X−)で示されている。すると、第1変形体側支持体261の第1梁261bは、この傾きの変化に相当する分だけ、水平の状態から左上がりの状態に変化する。この結果、第1容量素子C1を構成する電極間の離間距離が増大する。その増大の度合いは、X軸正側からX軸負側に向かって(図18における右側から左側に向かって)次第に大きくなる(離間距離が次第に大きくなる)。
As shown in FIG. 18, when a force in the negative direction of the X axis (leftward in FIG. 18) acts on the first
先に説明した第1の実施の形態による力覚センサ1cでは、第1変形体側支持体61と第1湾曲部45cとが第1検出部位A1にて接続されていたため、第1検出部位A1がZ軸方向に沿って変位した量と同じだけ、電極間の離間距離が一様に変化するようになっていた。ところが、図18に示す例では、第1梁261bが左上がりに傾斜することから、とりわけ第1梁261bの左方領域において、第1検出部位A1が上方に変位した量を超えて、電極間の離間距離が増大する。換言すれば、第1変形体側支持体261を片持ち梁構造体とし、この第1変形体側支持体261が第1検出部位A1とは異なる位置において第1湾曲部45cに接続されていることにより、第1検出部位A1に生じるZ軸方向の変位が増幅されることになる。
In the
このような構成により、第1受力部43に対してX軸負方向の力が作用したとき、本実施の形態による力覚センサ201cの第1容量素子C1は、静電容量値が減少するが、その減少の程度は、第1の実施の形態による力覚センサ1cの第1容量素子C1よりも大きくなる。
With such a configuration, when a force in the negative direction of the X axis acts on the first
次に、図19に示すように、第1受力部43に対してX軸正方向(図19における右方向)の力が作用すると、第1受力部43は、当該方向に移動する。これに伴って、第1湾曲部45cは、X軸方向に沿った圧縮力を受けるため、その曲率半径が小さくなるように弾性変形する。図19において、初期状態の第1湾曲部45cが破線で示されており、弾性変形している状態の第1湾曲部45cが実線で示されている。図19に示すように、この弾性変形によって、第1湾曲部45cのうち第1接続体261sが接続されている部位の接線L1がより垂直に立った状態に変化する。図19において、変化後の接線は、L1(X+)で示されている。すると、第1変形体側支持体261の第1梁261bは、この傾きの変化に相当する分だけ、水平の状態から左下がりの状態に変化する。この結果、第1容量素子C1を構成する電極間の離間距離が減少する。その減少の度合いは、X軸正側からX軸負側に向かって(図19における右側から左側に向かって)次第に大きくなる(離間距離が次第に小さくなる)。
Next, as shown in FIG. 19, when a force in the X-axis positive direction (right direction in FIG. 19) acts on the first
図19に示す例では、第1梁261bが左下がりに傾斜することから、とりわけ第1梁261bの左方領域において、第1検出部位A1が下方に変位した量を超えて、電極間の離間距離が減少する。換言すれば、前述したような片持ち梁構造体によって、第1検出部位A1に生じるZ軸方向の変位が増幅されることになる。
In the example shown in FIG. 19, since the
このような構成により、第1受力部43に対してX軸正方向の力が作用したとき、本実施の形態による力覚センサ201cの第1容量素子C1は、静電容量値が増大するが、その増大の程度は、第1の実施の形態による力覚センサ1cの第1容量素子C1よりも大きくなる。
With such a configuration, when a force in the X-axis positive direction acts on the first
次に、図20に示すように、第1受力部43に対してZ軸正方向(図20における上方向)の力が作用すると、第1受力部43は、当該方向に移動する。これに伴って、第1湾曲部45cは、第1受力部43に接続されたX軸負側の領域が上方に移動されるため、全体として、上方に移動するように弾性変形する。但し、X軸正側の端部は第1固定部41に固定されているため、移動しない。図20において、初期状態の第1湾曲部45cが破線で示されており、弾性変形している状態の第1湾曲部45cが実線で示されている。図20に示すように、この弾性変形によって、第1湾曲部45cのうち第1接続体261sが接続されている部位の接線L1がより水平に寝た状態に変化する。図20において、変化後の接線は、L1(Z+)で示されている。すると、第1変形体側支持体261の第1梁261bは、この傾きの変化に相当する分だけ、水平の状態から左上がりの状態に変化する。この結果、第1容量素子C1を構成する電極間の離間距離が増大する。その増大の度合いは、X軸正側からX軸負側に向かって(図20における右側から左側に向かって)次第に大きくなる(離間距離が次第に大きくなる)。
Next, as shown in FIG. 20, when a force in the Z-axis positive direction (upward direction in FIG. 20) acts on the first
図20に示す例では、第1梁261bが左上がりに傾斜することから、とりわけ第1梁261bの左方領域において、第1検出部位A1が上方に変位した量を超えて、電極間の離間距離が増大する。換言すれば、前述したような片持ち梁構造体によって、第1検出部位A1に生じるZ軸方向の変位が増幅されることになる。
In the example shown in FIG. 20, since the
このような構成により、第1受力部43に対してZ軸正方向の力が作用したとき、本実施の形態による力覚センサ201cの第1容量素子C1は静電容量値が減少するが、その減少の程度は、第1の実施の形態による力覚センサ1cの第1容量素子C1よりも大きくなる。
With such a configuration, when a force in the Z-axis positive direction acts on the first
次に、図21に示すように、第1受力部43に対してZ軸負方向(図21における下方向)の力が作用すると、第1受力部43は、当該方向に移動する。これに伴って、第1湾曲部45cは、第1受力部43に接続されたX軸負側の領域が下方に移動されるため、全体として、下方に移動するように弾性変形する。但し、X軸正側の端部は第1固定部41に固定されているため、移動しない。図21において、初期状態の第1湾曲部45cが破線で示されており、弾性変形している状態の第1湾曲部45cが実線で示されている。図21に示すように、この弾性変形によって、第1湾曲部45cのうち第1接続体261sが接続されている部位の接線L1がより垂直に立った状態に変化する。図21において、変化後の接線は、L1(Z−)で示されている。このような接線L1の傾きの変化から理解されるように、第1変形体側支持体261の第1梁261bは、この傾きの変化に相当する分だけ、水平の状態から左下がりの状態に変化する。この結果、第1容量素子C1を構成する電極間の離間距離が減少する。その減少の度合いは、X軸正側からX軸負側に向かって(図21における右側から左側に向かって)次第に大きくなる(離間距離が次第に小さくなる)。
Next, as shown in FIG. 21, when a force in the negative Z-axis direction (downward in FIG. 21) acts on the first
図21に示す例では、第1梁261bが左下がりに傾斜することから、とりわけ第1梁261bの左端領域において、第1検出部位A1が下方に変位した量を超えて、電極間の離間距離が減少する。換言すれば、前述したような片持ち梁構造体によって、第1検出部位A1に生じるZ軸方向の変位が増幅されることになる。
In the example shown in FIG. 21, since the
このような構成により、第1受力部43に対してZ軸負方向の力が作用したとき、本実施の形態による力覚センサ201cの第1容量素子C1は静電容量値が増大するが、その増大の程度は、第1の実施の形態による力覚センサ1cの第1容量素子C1よりも大きくなる。
With such a configuration, when a force in the Z-axis negative direction acts on the first
(2−2−2. 第2容量素子C2の静電容量値の変動)
次に、第2容量素子C2の静電容量値の変動について、図22乃至図25を参照して説明する。
(2-2-2. Variation of capacitance value of second capacitance element C2)
Next, changes in the capacitance value of the second capacitive element C2 will be described with reference to FIGS. 22 to 25.
図22は、図15に示す力覚センサ201cの第1受力部43に対してX軸負方向の力が作用したときの第2容量素子C2を示す部分的な概略断面図であり、図23は、図15に示す力覚センサ201cの第1受力部43に対してX軸正方向の力が作用したときの第2容量素子C2を示す部分的な概略断面図である。また、図24は、図15に示す力覚センサ201cの第1受力部43に対してZ軸正方向の力が作用したときの第2容量素子C2を示す部分的な概略断面図であり、図25は、図15に示す力覚センサ201cの第1受力部に対してZ軸負方向の力が作用したときの第2容量素子C2を示す部分的な概略断面図である。
22 is a partial schematic cross-sectional view showing the second capacitive element C2 when a force in the negative direction of the X-axis acts on the first
図22に示すように、第1受力部43に対してX軸負方向(図22における左方向)の力が作用すると、第1受力部43は、当該方向に移動する。これに伴って、第2湾曲部46cは、X軸方向に沿った圧縮力を受けるため、その曲率半径が小さくなるように弾性変形する。図22において、初期状態の第2湾曲部46cが破線で示されており、弾性変形している状態の第2湾曲部46cが実線で示されている。図22に示すように、この弾性変形によって、第2湾曲部46cのうち第2接続体262sが接続されている部位の接線L2がより垂直に立った状態に変化する。図22において、変化後の接線は、L2(X−)で示されている。すると、第2変形体側支持体262の第2梁262bは、この傾きの変化に相当する分だけ、水平の状態から右下がりの状態に変化する。この結果、第2容量素子C2を構成する電極間の離間距離が減少する。その減少の度合いは、X軸負側からX軸正側に向かって(図22における左側から右側に向かって)次第に大きくなる(離間距離が次第に小さくなる)。
As shown in FIG. 22, when a force in the X-axis negative direction (left direction in FIG. 22) acts on the first
先に説明した第1の実施の形態による力覚センサ1cでは、第2変形体側支持体62が第2湾曲部46cの第2検出部位A2にて当該第2湾曲部46c接続されていたため、第2検出部位A2がZ軸方向に沿って変位した量と同じだけ、電極間の離間距離が一様に変化するようになっていた。ところが、図22に示す例では、第2梁262bが右下がりに傾斜することから、とりわけ第2梁262bの右側領域において、第2検出部位A2が下方に変位した量を超えて、電極間の離間距離が減少する。換言すれば、第2変形体側支持体262を片持ち梁構造体とし、この第2変形体側支持体262が第2検出部位A2とは異なる位置において第2湾曲部46cに接続されていることにより、第2検出部位A2に生じるZ軸方向の変位が増幅されることになる。
In the
このような構成により、第1受力部43に対してX軸負方向の力が作用したとき、本実施の形態による力覚センサ201cの第2容量素子C2は静電容量値が増大するが、その増大の程度は、第1の実施の形態による力覚センサ1cの第2容量素子C2よりも大きくなる。
With such a configuration, when a force in the negative direction of the X axis acts on the first
次に、図23に示すように、第1受力部43に対してX軸正方向(図23における右方向)の力が作用すると、第1受力部43は、当該方向に移動する。これに伴って、第2湾曲部46cは、X軸方向に沿った引張力を受けるため、その曲率半径が大きくなるように弾性変形する。図23において、初期状態の第2湾曲部46cが破線で示されており、弾性変形している状態の第2湾曲部46cが実線で示されている。図23に示すように、この弾性変形によって、第2湾曲部46cのうち第2接続体262sが接続されている部位の接線L2がより水平に寝た状態に変化する。変化後の接線は、L2(X+)で示されている。すると、第2変形体側支持体262の第2梁262bは、この傾きの変化に相当する分だけ、水平の状態から右上がりの状態に変化する。この結果、第2容量素子C2を構成する電極間の離間距離が増大する。その増大の度合いは、X軸負側からX軸正側に向かって(図23における左側から右側に向かって)次第に大きくなる(離間距離が次第に大きくなる)。
Next, as shown in FIG. 23, when a force in the X-axis positive direction (right direction in FIG. 23) acts on the first
図23に示す例では、第2梁262bが右上がりに傾斜することから、とりわけ第2梁262bの右方領域において、第2検出部位A2が上方に変位した量を超えて、電極間の離間距離が増大する。換言すれば、前述したような片持ち梁構造体によって、第2検出部位A2に生じるZ軸方向の変位が増幅されることになる。
In the example shown in FIG. 23, since the
このような構成により、第1受力部43に対してX軸正方向の力が作用したとき、本実施の形態による力覚センサ201cの第2容量素子C2は、静電容量値が減少するが、その減少の程度は、第1の実施の形態による力覚センサ1cの第2容量素子C2よりも大きくなる。
With such a configuration, when a force in the positive direction of the X axis acts on the first
次に、図24に示すように、第1受力部43に対してZ軸正方向(図24における上方向)の力が作用すると、第1受力部43は、当該方向に移動する。これに伴って、第2湾曲部46cは、第1受力部43に接続されたX軸正側の端部が上方に移動されるため、全体として、上方に移動するように弾性変形する。但し、X軸負側の端部は第2固定部42に固定されているため、移動しない。図24において、初期状態の第2湾曲部46cが破線で示されており、弾性変形している状態の第2湾曲部46cが実線で示されている。図24に示すように、この弾性変形によって、第2湾曲部46cのうち第2接続体262sが接続されている部位の接線L2がより水平に寝た状態に変化する。変化後の接線は、L2(Z+)で示されている。すると、第2変形体側支持体262の第2梁262bは、この傾きの変化に相当する分だけ、水平の状態から右上がりの状態に変化する。この結果、第2容量素子C2を構成する電極間の離間距離が増大する。その増大の度合いは、X軸負側からX軸正側に向かって(図24における左側から右側に向かって)次第に大きくなる(離間距離が次第に大きくなる)。
Next, as shown in FIG. 24, when a force in the Z-axis positive direction (upward direction in FIG. 24) acts on the first
図23に示す例では、第2梁262bが右上がりに傾斜することから、とりわけ第2梁262bの右方領域において、第2検出部位A2が上方に変位した量を超えて、電極間の離間距離が増大する。換言すれば、前述したような片持ち梁構造体によって、第2検出部位A2に生じるZ軸方向の変位が増幅されることになる。
In the example shown in FIG. 23, since the
このような構成により、第1受力部43に対してZ軸正方向の力が作用したとき、本実施の形態による力覚センサ201cの第2容量素子C2は、静電容量値が減少するが、その減少の程度は、第1の実施の形態による力覚センサ1cの第2容量素子C2よりも大きくなる。
With such a configuration, when a force in the Z-axis positive direction acts on the first
次に、図25に示すように、第1受力部43に対してZ軸負方向(図25における下方向)の力が作用すると、第1受力部43は、当該方向に移動する。これに伴って、第2湾曲部46cは、第1受力部43に接続されたX軸正側の端部が下方に移動されるため、全体として、下方に移動するように弾性変形する。但し、X軸負側の端部は第2固定部42に固定されているため、移動しない。図25において、初期状態の第2湾曲部46cが破線で示されており、弾性変形している状態の第2湾曲部46cが実線で示されている。図25に示すように、この弾性変形によって、第2湾曲部46cのうち第2接続体262sが接続されている部位の接線L2がより垂直に立った状態に変化する。変化後の接線は、L2(Z−)で示されている。すると、第2変形体側支持体262の第2梁262bは、この傾きの変化に相当する分だけ、水平の状態から右下がりの状態に変化する。この結果、第2容量素子C2を構成する電極間の離間距離が減少する。その減少の度合いは、X軸負側からX軸正側に向かって(図25における左側から右側に向かって)次第に大きくなる(離間距離が次第に小さくなる)。
Next, as shown in FIG. 25, when a force in the negative Z-axis direction (downward in FIG. 25) acts on the first
図25に示す例では、第2梁262bが右下がりに傾斜することから、とりわけ第2梁262bの右方領域において、第2検出部位A2が下方に変位した量を超えて、電極間の離間距離が減少する。換言すれば、前述したような片持ち梁構造体によって、第2検出部位A2に生じるZ軸方向の変位が増幅されることになる。
In the example shown in FIG. 25, since the
このような構成により、第1受力部43に対してZ軸負方向の力が作用したとき、本実施の形態による力覚センサ201cの第2容量素子C2は、静電容量値が増大するが、その増大の程度は、第1の実施の形態による力覚センサ1cの第2容量素子C2よりも大きくなる。
With such a configuration, when a force in the negative Z-axis direction acts on the first
(2−2−3. 第3容量素子C3及び第4容量素子C4の静電容量値の変動)
本実施の形態による力覚センサ201cは、Y座標が正である部分(図16参照)とY座標が負である部分(図17参照)とが対称的な構造となっている。このため、第3容量素子C3及び第4容量素子C4の静電容量値の変動については、§2−2−1及び§2−2−2の説明に基づいて、類推的に次のように理解され得る。
(2-2-3. Variation of capacitance value of third capacitive element C3 and fourth capacitive element C4)
The
すなわち、図示されていないが、第3湾曲部47c及び第4湾曲部48cがX軸方向に沿って圧縮されたとき、及び、第3湾曲部47c及び第4湾曲部48cの、第2受力部44に接続された端部がZ軸負方向に移動されたときには、各容量素子C3、C4の静電容量値が増大する。その一方、第3湾曲部47c及び第4湾曲部48cがX軸方向に沿って引っ張られたとき、及び、第3湾曲部47c及び第4湾曲部48cの、第2受力部44に接続された端部がZ軸正方向に移動されたときには、各容量素子C3、C4の静電容量値が減少する。
That is, although not shown, when the
第3湾曲部47c及び/または第4湾曲部48cに弾性変形が生じると、前述したように第3及び/または第4梁263b、264bが傾斜するため、第3容量素子C3及び第4容量素子C4の静電容量値の変動は、第1の実施の形態による力覚センサ1cの第3容量素子C3及び第4容量素子C4よりも、大きくなる。
When the
結局、本実施の形態による力覚センサ201cでは、受力体20に作用する力ないしモーメントによって各容量素子C1〜C4に生じる静電容量値の変動は、図14に示す通りであるが、以上の説明から理解されるように、その変動量は、第1の実施の形態による力覚センサ1cにおける変動量よりも大きい。換言すれば、本実施の形態による力覚センサ201cは、第1の実施の形態による力覚センサ1cよりも高感度である。
After all, in the
以上のような本実施の形態によれば、梁261b〜264bが対応する検出部位A1〜A4とは異なる位置において湾曲部45c〜48cに接続されているため、この梁261b〜264bによって支持された変位電極Em1〜Em4に生じる変位が増幅される。すなわち、ある大きさの力ないしモーメントが作用した場合に、変位電極Em1〜Em4に生じる変位は、湾曲部45c〜48cの検出部位A1〜A4において変位電極Em1〜Em4が支持されている第1の実施の形態による力覚センサ1cにおいて当該変位電極Em1〜Em4に生じる変位よりも、大きい。このため、作用した力ないしモーメントに対する感度が高く、より精度の高い計測を行うことができる。
According to the present embodiment as described above, since the
<<< §3. 本発明の第3の実施の形態による力覚センサ >>>
< 3−1. 構成 >
次に、本発明の第3の実施の形態による力覚センサ301cについて説明する。
<<<< §3. Force sensor according to the third embodiment of the present invention >>>
<3-1. Composition>
Next, the
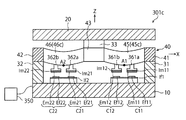
図26は、第3の実施の形態による力覚センサ301cの概略平面図である。また、図27は、図26の[27]−[27]線断面図であり、図28は、図26の[28]−[28]線断面図である。但し、図26では、図面の見やすさのため、受力体20の図示を省略してある。
FIG. 26 is a schematic plan view of the
図26乃至図28に示すように、力覚センサ301cは、湾曲部45c〜48cに各2つの容量素子が設けられている点で、第1及び第2の実施の形態による力覚センサ1c、201cと異なる。具体的には、図26及び図27に示すように、第1湾曲部45cの下面には、第1検出部位A1を挟んで、変形体40の周方向に沿って2つの容量素子C11、C12が配置されている。同様に、第2湾曲部46cの下面には、第2検出部位A2を挟んで、変形体40の周方向に沿って2つの容量素子C21、C22が配置されている。また、図26及び図28に示すように、第3湾曲部47cの下面には、第3検出部位A3を挟んで、変形体40の周方向に沿って2つの容量素子C31、C32が配置されており、第4湾曲部48cの下面には、第4検出部位A4を挟んで、変形体40の周方向に沿って2つの容量素子C41、C42が配置されている。
As shown in FIGS. 26 to 28, the
図示される例において、第1−1容量素子C11、第1−2容量素子C12、第2−1容量素子C21、第2−2容量素子C22、第3−1容量素子C31、第3−2容量素子C32、第4−1容量素子C41及び第4−2容量素子C42は、Z軸正方向から見て(上方から見て)、変形体40の周方向に沿って反時計回り(左回り)にこの順序で配置されている。また、図27及び図28に示すように、各湾曲部45c〜48cに2つずつ配置された容量素子C11〜C42は、対応する検出部位A1〜A4から等間隔で配置されている。
In the illustrated example, the 1-1st capacitive element C11, the 1-2nd capacitive element C12, the 2-1st capacitive element C21, the 2-2nd capacitive element C22, the 3-1st capacitive element C31, the 3-2nd The capacitive element C32, the 4-1st capacitive element C41, and the 4-2nd capacitive element C42 are counterclockwise (counterclockwise) along the circumferential direction of the
各容量素子C11〜C42の構成は、第1の実施の形態による力覚センサ1cに採用されている容量素子C1〜C4と、同様である。すなわち、図27に示すように、第1−1容量素子C11は、第1湾曲部45cに支持された第1−1変位電極Em11と、この第1−1変位電極Em11に対向する位置に配置された第1−1固定電極Ef11と、によって構成されている。第1−1変位電極Em11は、第1湾曲部45cに接続された第1−1変形体側支持体361aの下面に、第1−1変位基板Im11を介して支持されている。第1−1固定電極Ef11は、固定体10の上面に固定された第1固定体側支持体371上に、第1固定基板If1を介して支持されている。
The configurations of the respective capacitive elements C11 to C42 are similar to those of the capacitive elements C1 to C4 employed in the
また、図27に示すように、第1−2容量素子C12は、第1湾曲部45cに支持された第1−2変位電極Em12と、この第1−2変位電極Em12に対向する位置に配置された第1−2固定電極Ef12と、によって構成されている。第1−2変位電極Em12は、第1湾曲部45cに接続された第1−2変形体側支持体361bの下面に、第1−2変位基板Im12を介して支持されている。第1−2固定電極Ef12は、第1−1固定電極Ef11と同様に、固定体10の上面に固定された第1固定体側支持体371上に、第1固定基板If1を介して支持されている。すなわち、第1固定体側支持体371及び第1固定基板If1は、第1−1容量素子C11及び第1−2容量素子C12に対して共通の構成要素である。
Further, as shown in FIG. 27, the 1-2nd capacitive element C12 is arranged at a position opposite to the 1-2nd displacement electrode Em12 supported by the
図27に示すように、第2−1容量素子C21は、第2湾曲部46cに支持された第2−1変位電極Em21と、この第2−1変位電極Em21に対向する位置に配置された第2−1固定電極Ef21と、によって構成されている。第2−1変位電極Em21は、第2湾曲部46cに接続された第2−1変形体側支持体362aの下面に、第2−1変位基板Im21を介して支持されている。第2−1固定電極Ef21は、固定体10の上面に固定された第2固定体側支持体372上に、第2固定基板If2を介して支持されている。
As shown in FIG. 27, the 2-1st capacitive element C21 is arranged at the 2-1st displacement electrode Em21 supported by the
また、図27に示すように、第2−2容量素子C22は、第2湾曲部46cに支持された第2−2変位電極Em22と、この第2−2変位電極Em22に対向する位置に配置された第2−2固定電極Ef22と、によって構成されている。第2−2変位電極Em22は、第2湾曲部46cに接続された第2−2変形体側支持体362bの下面に、第2−2変位基板Im22を介して支持されている。第2−2固定電極Ef22は、第2−1固定電極Ef21と同様に、固定体10の上面に固定された第2固定体側支持体372上に、第2固定基板If2を介して支持されている。すなわち、第2固定体側支持体372及び第2固定基板If2は、第2−1容量素子C21及び第2−2容量素子C22に対して共通の構成要素である。
Further, as shown in FIG. 27, the 2-2nd capacitive element C22 is arranged at the 2-2nd displacement electrode Em22 supported by the
図28に示すように、第3−1容量素子C31は、第3湾曲部47cに支持された第3−1変位電極Em31と、この第3−1変位電極Em31に対向する位置に配置された第3−1固定電極Ef31と、によって構成されている。第3−1変位電極Em31は、第3湾曲部47cに接続された第3−1変形体側支持体363aの下面に、第3−1変位基板Im31を介して支持されている。第3−1固定電極Ef31は、固定体10の上面に固定された第3固定体側支持体373上に、第3固定基板If3を介して支持されている。
As shown in FIG. 28, the 3-1st capacitive element C31 is arranged at the 3-1st displacement electrode Em31 supported by the third
また、図28に示すように、第3−2容量素子C32は、第3湾曲部47cに支持された第3−2変位電極Em32と、この第3−2変位電極Em32に対向する位置に配置された第3−2固定電極Ef32と、によって構成されている。第3−2変位電極Em32は、第3湾曲部47cに接続された第3−2変形体側支持体363bの下面に、第3−2変位基板Im32を介して支持されている。第3−2固定電極Ef32は、第3−1固定電極Ef31と同様に、固定体10の上面に固定された第3固定体側支持体373上に、第3固定基板If3を介して支持されている。すなわち、第3固定体側支持体373及び第3固定基板If3は、第3−1容量素子C31及び第3−2容量素子C32に対して共通の構成要素である。
Further, as shown in FIG. 28, the 3-2nd capacitive element C32 is arranged at a position facing the 3-2nd displacement electrode Em32 supported by the third
更に、図28に示すように、第4−1容量素子C41は、第4湾曲部48cに支持された第4−1変位電極Em41と、この第4−1変位電極Em41に対向する位置に配置された第4−1固定電極Ef41と、によって構成されている。第4−1変位電極Em41は、第4湾曲部48cに接続された第4−1変形体側支持体364aの下面に、第4−1変位基板Im41を介して支持されている。第4−1固定電極Ef41は、固定体10の上面に固定された第3固定体側支持体373上に、第4固定基板If4を介して支持されている。
Further, as shown in FIG. 28, the 4-1st capacitive element C41 is arranged at a position facing the 4-1st displacement electrode Em41 supported by the
また、図28に示すように、第4−2容量素子C42は、第4湾曲部48cに支持された第4−2変位電極Em42と、この第4−2変位電極Em42に対向する位置に配置された第4−2固定電極Ef42と、によって構成されている。第4−2変位電極Em42は、第4湾曲部48cに接続された第4−2変形体側支持体364bの下面に、第4−2変位基板Im42を介して支持されている。第4−2固定電極Ef42は、第4−1固定電極Ef41と同様に、固定体10の上面に固定された第4固定体側支持体374上に、第4固定基板If4を介して支持されている。すなわち、第4固定体側支持体374及び第4固定基板If4は、第4−1容量素子C41及び第4−2容量素子C42に対して共通の構成要素である。その他の構成は第1の実施の形態による力覚センサ1cとほぼ同様であるため、図面において対応する構成要素には同様の符号を付し、その詳細な説明は省略する。
Further, as shown in FIG. 28, the 4-2nd capacitive element C42 is arranged at the 4-2nd displacement electrode Em42 supported by the fourth
なお、第1−1〜第2−4容量素子C11〜C24は、各容量素子C11〜C24を構成する変位電極Em11〜Em24及び固定電極Ef11〜Ef24の実効対向面積が全て同一であり、電極間の離間距離も全て等しくなるように構成されている。 In the 1-1 to 2-4 capacitive elements C11 to C24, the displacement electrodes Em11 to Em24 and the fixed electrodes Ef11 to Ef24 forming the capacitive elements C11 to C24 have the same effective facing area, and The separation distances are also equal to each other.
< 3−2. 作用 >
次に、図29は、図26の力覚センサ301cに対して、力ないしモーメントが作用した時に各容量素子C11〜C24に生じる静電容量値の変動を示す図表である。この図表において、「+」は、容量素子の静電容量値が増大することを示しており、「−」は、容量素子の静電容量値が減少することを示している。
<3-2. Action>
Next, FIG. 29 is a chart showing variations in the capacitance value generated in each of the capacitive elements C11 to C24 when a force or moment acts on the
本実施の形態による力覚センサ301cに対して、力ないしモーメントが作用すると、各湾曲部45c〜48cには、作用した力ないしモーメントに応じて、図3〜図9で説明したような弾性変形が生じる。この弾性変形より、容量素子C11〜C42の静電容量値は、図29に示すように変動する。すなわち、第1−1容量素子C11及び第1−2容量素子C12は、第1の実施の形態による力覚センサ1cの第1容量素子C1と同様の挙動を示す(図14のC1の列を参照)。また、第2−1容量素子C21及び第2−2容量素子C22は、第1の実施の形態による力覚センサ1cの第2容量素子C2と同様の挙動を示し(図14のC2の列を参照)、第3−1容量素子C31及び第3−2容量素子C32は、第1の実施の形態による力覚センサ1cの第3容量素子C3と同様の挙動を示し(図14のC3の列を参照)、第4−1容量素子C41及び第4−2容量素子C42は、第1の実施の形態による力覚センサ1cの第4容量素子C4と同様の挙動を示す(図14のC4の列を参照)。
When a force or moment acts on the
図29に示す図表に鑑み、検出回路250は、次の[式2]に基づいて力覚センサ301cに作用したモーメントMx、My、Mz及び力Fzを算出する。本明細書に記載された各式において、C11〜C24の記号は、第1−1〜第2−4容量素子C11〜C24の静電容量値の変動量をそれぞれ示している。また、Mx、My、Mz及びFzの末尾の符号は、[式2]を用いて計測された力ないしモーメントと、後述される[式3]を用いて計測された力ないしモーメントと、を区別するためのものである。
[式2]
Mx1=−C11−C21+C31+C41
My1=C11−C21−C31+C41
Mz1=−C11+C21−C31+C41
Fz1=−(C11+C21+C31+C41)
この[式2]は、各湾曲部45c〜48cに配置されている各2つの容量素子のうち、Z軸正方向から見て(上方から見て)、変形体40の右回りの方向により進んでいる方の容量素子を用いて、作用した力ないしモーメントを計測するための式である。
In consideration of the chart shown in FIG. 29, the detection circuit 250 calculates the moments Mx, My, Mz and the force Fz acting on the
[Formula 2]
Mx1 = -C11-C21 + C31 + C41
My1 = C11-C21-C31 + C41
Mz1 = -C11 + C21-C31 + C41
Fz1 =-(C11 + C21 + C31 + C41)
This [Formula 2] advances in the clockwise direction of the
あるいは、力覚センサ301cに作用したモーメントMx、My、Mz及び力Fzは、次の[式3]を用いても、算出される。
[式3]
Mx2=−C12−C22+C32+C42
My2=C12−C22−C32+C42
Mz2=−C12+C22−C32+C42
Fz2=−(C12+C22+C32+C42)
この[式3]は、各湾曲部45c〜48cに配置されている各2つの容量素子のうち、Z軸正方向から見て(上方から見て)、変形体40の左回りの方向により進んでいる方の容量素子を用いて、作用した力ないしモーメントを計測するための式である。
Alternatively, the moments Mx, My, Mz and the force Fz acting on the
[Formula 3]
Mx2 = -C12-C22 + C32 + C42
My2 = C12-C22-C32 + C42
Mz2 = -C12 + C22-C32 + C42
Fz2 =-(C12 + C22 + C32 + C42)
This [Formula 3] advances in the counterclockwise direction of the
< 3−3. 故障診断 >
本実施の形態による力覚センサ301cは、単一の力覚センサ301cによって、故障診断を行うことが可能である。ここでは、その診断方法について説明する。
<3-3. Fault diagnosis >
The
前述したように、力覚センサ301cに配置されている8つの容量素子C11〜C24は、電極間の実効対向面積及び離間距離が同一である。さらに、[式2]に用いられる4つの容量素子C11、C21、C31、C41と、[式3]に用いられる4つの容量素子C12、C22、C32、C42とは、第1〜第4湾曲部45c〜48cに規定された検出部位A1〜A4に対して対称的に配置されている。これらのことから、正常に機能している力覚センサ301cでは、[式2]に基づいて計測された力ないしモーメントと[式3]に基づいて計測された力ないしモーメントとが、一致することになる。すなわち、正常に機能している力覚センサ301cでは、以下の[式4]の関係が成立する。
[式4]
Mx1=Mx2
My1=My2
Mz1=Mz2
Fz1=Fz2
As described above, the eight capacitive elements C11 to C24 arranged in the
[Formula 4]
Mx1 = Mx2
My1 = My2
Mz1 = Mz2
Fz1 = Fz2
このことから、次のようにして力覚センサ301cの故障診断を行うことができる。すなわち、検出回路250は、力覚センサ301cに作用した力ないしモーメントを[式2]及び[式3]の両方に基づいて計測し、[式2]に基づいて計測された値(Mx1、My1、Mz1、Fz1)と、[式3]に基づいて計測された値(Mx2、My2、Mz2、Fz2)と、の差の絶対値が、全て、所定の閾値([式5]におけるCmx、Cmy、Cmz、Cfz)以下であれば、当該力覚センサ301cが正常に機能していると判定する。すなわち、次の[式5]が成立しているとき、検出回路250は、力覚センサ301cが正常に機能していると判定する。なお、本実施の形態では、所定の閾値Cmx、Cmy、Cmz、Cfzは、予め検出回路250内に格納されている。
[式5]
|Mx1−Mx2|≦Cmx 且つ
|My1−My2|≦Cmy 且つ
|Mz1−Mz2|≦Cmz 且つ
|Fz1−Fz2|≦Cfz
From this, the failure diagnosis of the
[Formula 5]
| Mx1-Mx2 | ≦ Cmx and | My1-My2 | ≦ Cmy and | Mz1-Mz2 | ≦ Cmz and | Fz1-Fz2 | ≦ Cfz
その一方、前記差のうち少なくとも1つが、所定の閾値C1よりも大きければ、検出回路250は、力覚センサ301cが正常に機能していない(故障している)と判定する。すなわち、次の[式6]が成立しているとき、検出回路250は、力覚センサ301cが正常に機能していないと判定する。
[式6]
|Mx1−Mx2|>Cmx または
|My1−My2|>Cmy または
|Mz1−Mz2|>Cmz または
|Fz1−Fz2|>Cfz
On the other hand, if at least one of the differences is larger than the predetermined threshold value C1, the detection circuit 250 determines that the
[Formula 6]
| Mx1-Mx2 |> Cmx or | My1-My2 |> Cmy or | Mz1-Mz2 |> Cmz or | Fz1-Fz2 |> Cfz
以上のような本実施の形態による力覚センサ301cによれば、第1〜第4湾曲部45c〜48cに2つずつ配置された容量素子のうち、各1つ(合計4つ)を用いて計測された力ないしモーメントの値と、残りの各1つ(合計4つ)を用いて計測された力ないしモーメントの値と、の差に基づいて、単一の力覚センサ301cによってその故障を診断することができる。このことにより、力覚センサ301cの安全性及び信頼性が向上される。
According to the
以上の説明では、力覚センサ301cの故障診断を行うために、[式2]に基づいて求められた特定の力ないしモーメントと[式3]に基づいて求められた当該特定の力ないしモーメントとを比較していたが、このような方法には限定されない。例えば、[式2]と「式3」との和に基づいて求められた特定の力ないしモーメント(例:Mx1+Mx2)と、[式2]または「式3」のいずれか一方に基づいて求められた当該特定の力ないしモーメント(例:Mx1またはMx2)とを比較することによって、故障診断を行っても良い。具体的な診断の方法は、上述した方法と同様である。すなわち、X軸まわりのモーメントMxに着目して故障診断を行う場合、[式2]と「式3」との和であるMx1+Mx2に基づいて求められた特定の力ないしモーメントをM12とすると、|Mx12−Mx1|または|Mx12−Mx2|が所定の閾値を超えているか否かが評価される。このことは、他の力ないしモーメントに基づいて故障診断を行う場合にも当てはまる。
In the above description, in order to perform the failure diagnosis of the
更に、以上の説明では、力ないしモーメントを測定するために、[式2]及び「式3」のうちの一方の式を用いたが、[式2]と「式3」との和(例:Mx1+Mx2)を用いても良い。
Further, in the above description, one of [Equation 2] and “
<<< §4. 本発明の第4の実施の形態による力覚センサ >>>
< 4−1. 構成 >
次に、本発明の第4の実施の形態による力覚センサ401cについて説明する。
<<<< §4. Force Sensor According to Fourth Embodiment of the Present Invention >>
<4-1. Composition>
Next, a
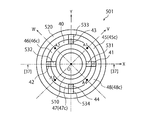
図30は、本発明の第4の実施の形態による力覚センサ401cの概略平面図であり、図31は、図30の[31]−[31]線断面図であり、図32は、図30の[32]−[32]線断面図である。但し、図30では、図面の見やすさのため、受力体20の図示を省略してある。
30 is a schematic plan view of the
図30乃至図32に示すように、本実施の形態による力覚センサ401cは、第1〜第4湾曲部445c〜448cが互いに異なる2つのバネ定数を有する部分から構成されている点で、第3の実施の形態による力覚センサ301cと異なる。具体的には、図30及び図31に示すように、第1湾曲部445cは、正のX軸と正のV軸とで挟まれた領域に位置する、相対的にバネ定数が小さい第1低弾力部445Lと、正のV軸と正のY軸とで挟まれた領域に位置する、相対的にバネ定数が大きい第1高弾力部445Hと、によって構成されている。第1低弾力部445Lと第1高弾力部445Hとは、第1検出部位A1において(V軸上において)一体的に接続されている。同様に、第2湾曲部446cは、正のY軸と正のW軸とで挟まれた領域に位置する、相対的にバネ定数が小さい第2低弾力部446Lと、正のW軸と負のX軸とで挟まれた領域に位置する、相対的にバネ定数が大きい第2高弾力部446Hと、によって構成されている。第2低弾力部446Lと第2高弾力部446Hとは、第2検出部位A2において(W軸上において)一体的に接続されている。
As shown in FIGS. 30 to 32, the
また、図30及び図32に示すように、第3湾曲部447cは、負のX軸と負のV軸とで挟まれた領域に位置する、相対的にバネ定数が小さい第3低弾力部447Lと、負のV軸と負のY軸とで挟まれた領域に位置する、相対的にバネ定数が大きい第3高弾力部447Hと、によって構成されている。第3低弾力部447Lと第3高弾力部447Hとは、第3検出部位A3において(V軸上において)一体的に接続されている。同様に、第4湾曲部448cは、負のY軸と負のW軸とで挟まれた領域に位置する、相対的にバネ定数が小さい第4低弾力部448Lと、負のW軸と正のX軸とで挟まれた領域に位置する、相対的にバネ定数が大きい第4高弾力部448Hと、によって構成されている。第4低弾力部448Lと第4高弾力部448Hとは、第4検出部位A4において(W軸上において)一体的に接続されている。
Further, as shown in FIGS. 30 and 32, the
図31及び図32に示すように、各低弾力部445L〜448Lは、各高弾力部445H〜448Hと比較して、Z軸方向(上下方向)の厚みが小さく構成されている。もちろん、このような態様には限定されず、他の実施の形態では、各低弾力部445L〜448Lが各高弾力部445H〜448Hと比較して、径方向の幅が小さく構成されることによりバネ定数が相違していても良いし、互いに異なる材質で構成されることによりバネ定数が相違していても良い。
As shown in FIGS. 31 and 32, the low-
図30乃至図32に示すように、各湾曲部445c〜448cには、第3の実施の形態による力覚センサ301cと同様に、各2つの容量素子C11〜C42が配置されている。当該各2つの容量素子は、対応する検出部位A1〜A4を挟んで、変形体40の周方向に沿って配置されている。具体的には、第1−1容量素子C11は、第1低弾力部445Lの下面に配置されており、第1−2容量素子C12は、第1高弾力部445Hの下面に配置されている。第2−1容量素子C21は、第2低弾力部446Lの下面に配置されており、第2−2容量素子C22は、第2高弾力部446Hの下面に配置されている。第3−1容量素子C31は、第3低弾力部447Lの下面に配置されており、第3−2容量素子C32は、第3高弾力部447Hの下面に配置されている。第4−1容量素子C41は、第4低弾力部448Lの下面に配置されており、第4−2容量素子C42は、第4高弾力部448Hの下面に配置されている。その他の構成は第3の実施の形態と同様であるため、図面において対応する構成要素には同様の符号を付し、その詳細な説明は省略する。
As shown in FIGS. 30 to 32, each of the two
< 4−2. 作用 >
次に、図33は、図30の力覚センサ401cに対して、力ないしモーメントが作用した時に各容量素子C11〜C24に生じる静電容量値の変動を示す図表である。この図表において、「+」は、静電容量値が増大することを示しており、「++」は、静電容量値が大きく増大することを示している。また、「−」は、静電容量値が減少することを示しており、「−−」は、静電容量値が大きく減少することを示している。
<4-2. Action>
Next, FIG. 33 is a chart showing variations in the capacitance value generated in each of the capacitive elements C11 to C24 when a force or moment acts on the
本実施の形態による力覚センサ401cに対して、力ないしモーメントが作用すると、各湾曲部445c〜448cには、全体として、作用した力ないしモーメントに応じて、図3〜図9で説明したような弾性変形が生じる。したがって、この弾性変形により、容量素子C11〜C42の静電容量値が変動する。この変動は、第3の実施の形態による力覚センサ301cの各容量素子C11〜C42の静電容量値とほぼ同様である。但し、バネ定数の相違から、各湾曲部445c〜448cでは、低弾力部444L〜448Lにおいて相対的に大きな弾性変形が生じ、高弾力部444H〜448Hにおいて相対的に小さな弾性変形が生じる。このため、図33に示すように、低弾力部444L〜448Lに配置された容量素子C11、C21、C31、C41において相対的に大きな静電容量値の変動が生じ、高弾力部444H〜448Hに配置された容量素子C12、C22、C32、C42において相対的に小さな静電容量値の変動が生じる。
When a force or moment acts on the
力覚センサ401cに作用したモーメントMx、My、Mz及び力Fzは、図33に示す図表に基づき、次の[式7]を用いて算出される。Mx、My、Mz及びFzの末尾の符号は、[式7]を用いて算出される力ないしモーメントと、後述される[式8]を用いて算出される力ないしモーメントと、を区別するためのものである。
[式7]
Mx1=−C11−C21+C31+C41
My1=C11−C21−C31+C41
Mz1=−C11+C21−C31+C41
Fz1=−(C11+C21+C31+C41)
この[式7]は、第1〜第4湾曲部445c〜448cに配置されている各2つの容量素子のうち、低弾力部445L〜448Lに配置されている方の4つの容量素子C11、C21、C31、C41を用いて、作用した力ないしモーメントを計測するための式である。
The moments Mx, My, Mz and the force Fz acting on the
[Formula 7]
Mx1 = -C11-C21 + C31 + C41
My1 = C11-C21-C31 + C41
Mz1 = -C11 + C21-C31 + C41
Fz1 =-(C11 + C21 + C31 + C41)
This [Equation 7] is based on the four capacitive elements C11 and C21 that are arranged in the low-
あるいは、力覚センサ401cに作用したモーメントMx、My、Mz及び力Fzは、次の[式8]を用いても算出される。
[式8]
Mx2=−C12−C22+C32+C42
My2=C12−C22−C32+C42
Mz2=−C12+C22−C32+C42
Fz2=−(C12+C22+C32+C42)
この[式8]は、第1〜第4湾曲部445c〜448cに配置されている各2つの容量素子のうち、高弾力部445H〜448Hに配置されている方の4つの容量素子C12、C22、C32、C42を用いて、作用した力ないしモーメントを計測するための式である。
Alternatively, the moments Mx, My, Mz and the force Fz acting on the
[Formula 8]
Mx2 = -C12-C22 + C32 + C42
My2 = C12-C22-C32 + C42
Mz2 = -C12 + C22-C32 + C42
Fz2 =-(C12 + C22 + C32 + C42)
This [Formula 8] is based on the four capacitive elements C12 and C22 of the two capacitive elements disposed in the first to fourth
本実施の形態では、図33に示す図表に鑑み、検出回路450は、低弾力部445L〜448Lに配置されている4つの容量素子C11、C21、C31、C41の静電容量値の変動に基づく[式7]を用いて作用した力ないしモーメントを計測する。このことにより、S/Nに優れた高感度の計測が可能となる。もちろん、[式8]を用いて作用した力ないしモーメントを計測しても良い。
In the present embodiment, in view of the chart shown in FIG. 33, the
< 4−3. 故障診断 >
本実施の形態による力覚センサ401cは、次の点で、第3の実施の形態による力覚センサ301cよりも高度な故障診断を行うことができる。すなわち、第3の実施の形態による力覚センサ301cは、電極が破損したときや、電極間に異物が混入したときには、故障を検知することが可能である。その一方、変形体40に金属疲労が生じることによって当該力覚センサ301cが正常に機能しなくなった場合には、[式2]に基づいて計測された力ないしモーメント(Mx1、My1、Mz1、Fz1)と[式3]に基づいて計測された力ないしモーメント(Mx2、My2、Mz2、Fz2)との間に、相違が生じない可能性がある。この場合、力覚センサ301cは、故障診断を適正に行うことができない。変形体40に金属疲労が生じると、変形体40を構成する弾性体にクラック等が生じ、最終的には変形体40が破断してしまう恐れがある。このため、金属疲労による故障をも検知することが可能な力覚センサを提供できれば、信頼性及び安全性を一層高めることができる。
<4-3. Fault diagnosis >
The
本実施の形態による力覚センサ401cは、このような問題に対処するためのものである。すなわち、力覚センサ401cは、変形体40に金属疲労が生じることによって正常に機能しなくなった場合にも、適正に故障診断を行うことができるのである。以下、本実施の形態による力覚センサ401cによる故障診断について、詳細に説明する。
The
まず、故障診断の原理について説明する。力覚センサ401cの変形体40に繰り返しの負荷が作用すると、当該変形体40には、金属疲労が生じる。この金属疲労が蓄積されると、変形体40の強度が低下し、最終的には変形体40が破断することになる。一般的に、金属材料に金属疲労が蓄積すると、当該金属材料が軟化する。このため、第1〜第4湾曲部445c〜448cのバネ定数が、低下する。換言すれば、変形体40は、金属疲労の蓄積によって、初期状態と比較して、作用する力ないしモーメントに対する感度が上昇する。
First, the principle of failure diagnosis will be described. When a repeated load acts on the
図34は、図30に示す力覚センサ401cに金属疲労が生じていない状態(初期状態)において、当該力覚センサ401cに作用するX軸まわりのモーメントMxの大きさと、当該力覚センサ401cから出力される、モーメントMxを示す電気信号と、の関係を示すグラフであり、図35は、図30の力覚センサ401cに金属疲労が生じている状態において、力覚センサ401cに作用するX軸まわりのモーメントMxの大きさと、当該力覚センサ401cから出力される、モーメントMxを示す電気信号と、の関係を示すグラフである。図34及び図35の符号「T1」は、低弾力部445L〜448Lに配置された4つの容量素子の静電容量値の変動量に基づく電気信号である第1電気信号を示しており、符号「T2」は、高弾力部445H〜448Hに配置された4つの容量素子の静電容量値の変動量に基づく電気信号である第2電気信号を示している。また、「T1」及び「T2」の末尾の符号は、初期状態における電気信号(末尾にaを付加)と、金属疲労が蓄積している状態における電気信号(末尾にbを付加)と、を区別するためのものである。
FIG. 34 shows the magnitude of the moment Mx about the X axis acting on the
第1電気信号T1及び第2電気信号T2を具体的に書き下すと、次の[式9]のようになる。
[式7]
T1(T1a、T1b)=−C11−C21+C31+C41
T2(T2a、T2b)=−C12−C22+C32+C42
When the first electric signal T1 and the second electric signal T2 are specifically written, the following [Equation 9] is obtained.
[Formula 7]
T1 (T1a, T1b) = − C11−C21 + C31 + C41
T2 (T2a, T2b) =-C12-C22 + C32 + C42
図34を参照すると、初期状態の第1電気信号T1aを示すグラフ(直線)の傾き(感度)は、2.0であり、初期状態の第2電気信号T2aを示すグラフ(直線)の傾き(感度)は、0.5である。その一方、図35を参照すると、金属疲労が蓄積している状態の第1電気信号T1bを示すグラフ(直線)の傾き(感度)は、3.0であり、金属疲労が蓄積している状態の第2電気信号T2bを示すグラフ(直線)の傾き(感度)は、0.6である。 Referring to FIG. 34, the slope (sensitivity) of the graph (straight line) showing the first electric signal T1a in the initial state is 2.0, and the slope (sensitivity) of the graph (straight line) showing the second electric signal T2a in the initial state ( The sensitivity) is 0.5. On the other hand, referring to FIG. 35, the slope (sensitivity) of the graph (straight line) showing the first electrical signal T1b in the state where metal fatigue is accumulated is 3.0, and the state where metal fatigue is accumulated The slope (sensitivity) of the graph (straight line) showing the second electric signal T2b of is 0.6.
これらのことから、力覚センサ401cは、変形体への金属疲労の蓄積によって、作用するX軸まわりのモーメントMxに対する感度が上昇していることが分かる。とりわけ、低弾力部445L〜448Lに配置された4つの容量素子の検出感度が50%も上昇している。その一方、高弾力部445H〜448Hに配置された4つの容量素子の検出感度も上昇してはいるが、その割合は20%にとどまっている。
From these, it can be seen that the
ここで着目すべきは、低弾力部445L〜448Lに配置された4つの容量素子C11、C21、C31、C41と高弾力部445H〜448Hに配置された4つの容量素子C12、C22、C32、C42とで、感度の変化が異なっているということである。このような差異は、高弾力部445H〜448Hに生じる歪よりも低弾力部445L〜448Lに生じる歪の方が大きいため、相対的に低弾力部445L〜448Lに金属疲労が多く蓄積することに起因している。このような感度の変化を第1電気信号T1と第2電気信号T2との比率に着目して定量的に評価すると、次のとおりである。すなわち、初期状態では、第1電気信号T1aと第2電気信号T2aとの比率(T1a/T2a)は、4.0であったが、金属疲労が蓄積すると、第1電気信号T1bと第2電気信号T2bとの比率(T1b/T2b)は、5.0に上昇した。
It should be noted here that four capacitive elements C11, C21, C31, C41 arranged in the low
金属疲労が発現するメカニズムを踏まえれば、この比率T1/T2は、繰り返しの負荷(力ないしモーメント)が作用することに伴って4.0から5.0まで次第に上昇する。本実施の形態による力覚センサ401cは、作用した力ないしモーメントの計測に加え、前記比率T1/T2の変化に着目することによって、力覚センサ1cの故障診断をも行う。故障診断は、検出回路450が、計測時点における第1電気信号T1と第2電気信号T2との比率(T1/T2)と、初期状態における第1電気信号T1aと第2電気信号T2aとの比率(T1a/T2a)と、の差((T1/T2)−(T1a/T2a))が所定の値(閾値C)を超えているか否かを評価することによって、行われる。すなわち、以下の[式10]が成立しているとき、検出回路450は、力覚センサ401cが正常に機能していると判定する。なお、本実施の形態では、初期状態における第1電気信号T1aと第2電気信号T2aとの比率(T1a/T2a)及び閾値Cは、予め検出回路450内に記憶されている。
[式10]
(T1/T2)−(T1a/T2a)≦C (C:閾値)
Considering the mechanism of metal fatigue, this ratio T1 / T2 gradually increases from 4.0 to 5.0 with the repeated load (force or moment). The
[Formula 10]
(T1 / T2)-(T1a / T2a) ≦ C (C: threshold)
一方、以下の[式11]が成立しているとき、検出回路450は、力覚センサ401cが正常に機能していない(故障している)と判定する。
[式11]
(T1/T2)−(T1a/T2a)>C (C:閾値)
On the other hand, when the following [Equation 11] is established, the
[Formula 11]
(T1 / T2)-(T1a / T2a)> C (C: threshold)
以上の説明においては、力覚センサ401cに対してX軸まわりのモーメントMxが作用した場合を例に説明を行ったが、その他のモーメントMy、Mzないし力Fzが作用した場合も、同様にして故障診断を行うことができる。具体的には、着目する力ないしモーメントについて、[式7]に記載された式を第1電気信号T1とし、且つ、[式8]に記載された式を第2電気信号T2とする。このとき、力覚センサ401cに作用する力ないしモーメントと第1及び第2電気信号T1、T2との関係は、初期状態では図34に示すグラフと同様であり、変形体40に金属疲労が蓄積している状態では図35に示すグラフと同様である。但し、Z軸方向の力Fzが作用した場合には、横軸の「モーメント」を「力」と読み替えることとする。したがって、いずれの力ないしモーメントが作用した場合であっても、前述した[式10]及び[式11]に基づいて適正に力覚センサ401cの故障診断が行われる。
In the above description, the case where the moment Mx about the X-axis acts on the
以上のような本実施の形態によれば、力ないしモーメントを計測しつつ、変形体40に発現した金属疲労による故障をも検知可能な力覚センサ401cを提供することができる。これにより、力覚センサ401cの信頼性及び安全性が一層高められる。
According to the present embodiment as described above, it is possible to provide the
<<< §5. 本発明の第5の実施の形態による力覚センサ >>>
次に、本発明の第5の実施の形態による力覚センサ501cについて説明する。
<<<< §5. Force sensor according to a fifth embodiment of the present invention >>>
Next, a force sensor 501c according to a fifth embodiment of the present invention will be described.
図36は、本発明の第5の実施の形態による力覚センサ501cの基本構造501を示す概略平面図であり、図37は、図36の[37]−[37]線断面図である。
36 is a schematic plan view showing a
図36及び37に示すように、基本構造501は、固定体510及び受力体520の構造が第1の実施の形態による力覚センサ1cの基本構造1とは異なっている。具体的には、基本構造501の固定体510及び受力体520は、共に円環(円筒)の形状を有している。そして、図36及び図37に示すように、Z軸方向から見て、固定体510は変形体40の内側に配置されており、受力体520は、変形体40の外側に配置されている。固定体510、受力体520及び変形体40は、それらの中心軸線がいずれもZ軸と重なっており、互いに同心となっている。また、図37に示すように、固定体510は、その下端のZ座標値が変形体40の下端(検出部位A1〜A4)のZ座標値よりも小さくなるように配置されている。更に、受力体520は、その上端のZ座標値が変形体40の上端のZ座標値よりも大きくなるように配置されている。
As shown in FIGS. 36 and 37, the
以上のような固定体510、受力体520及び変形体40の配置に伴って、第1〜第4接続部材531〜534の配置も、第1の実施の形態による力覚センサ1cとは異なっている。すなわち、図36及び図37に示すように、第1接続部材531は、正のX軸上にて、固定体510の外側面(X軸正方向に面する側面)と変形体40の内側面(X軸負方向に面する側面)とを接続している。他方、第2接続部材532は、負のX軸上にて、固定体510の外側面(X軸負方向に面する側面)と変形体40の内側面(X軸正方向に面する側面)とを接続している。更に、図36に示すように、正のY軸上において、受力体520の内側面(Y軸負方向に面する側面)と変形体40の外側面(Y軸正方向に面する側面)とが第3接続部材533によって接続されており、負のY軸上において、受力体520の内側面(Y軸正方向に面する側面)と変形体40の外側面(Y軸負方向に面する側面)とが第4接続部材534によって接続されている。その他の構成は第1の実施の形態による力覚センサ1cの基本構造1と同様である。このため、図面において、対応する構成要素には同様の符号を付し、その詳細な説明は省略する。
Due to the arrangement of the fixed
図示されていないが、以上のような基本構造501に対して、第1の実施の形態による力覚センサ1cと同様の配置にて4つの容量素子を配置することにより、力覚センサ501cを構成することができる。なお、図37には、固定電極を配置するための部材が示されていないが、力覚センサ501cが取り付けられる部位に適宜固定電極を配置しても良いし、あるいは固定体510に付加的な部材を固定し、この部材に固定電極を配置しても良い。
Although not shown, the force sensor 501c is configured by disposing four capacitive elements in the same arrangement as the
以上のような力覚センサ501cは、例えばロボットの関節など、互いに相対移動する第1部材及び第2部材から構成される機構部に好適に設置され得る。すなわち、第1部材に固定体510を連結し、第2部材に受力体520を連結すれば、限られたスペースに、他の部材と干渉しないような態様で、力覚センサ501cを配置することができる。
The force sensor 501c as described above can be suitably installed in a mechanism unit including a first member and a second member that move relative to each other, such as a joint of a robot. That is, if the fixed
なお、力覚センサ501cに作用した力ないしモーメントを計測するための方法は、第1の実施の形態による力覚センサ1cと同様であるため、ここでは、その詳細な説明は省略する。
Since the method for measuring the force or moment acting on the force sensor 501c is the same as that of the
以上のような基本構造501の変形例として、次のような基本構造502も考えられる。
As a modified example of the above
図38は、図36の基本構造501の変形例を示す概略平面図であり、図39は、図38の[39]−[39]線断面図である。
38 is a schematic plan view showing a modified example of the
図38及び図39に示すように、本変形例による基本構造502は、変形体540に湾曲部が設けられていない点で、図36及び図37に示す基本構造501と異なる。したがって、本変形例の変形体540は、円環(円筒)の形状を有し、その上面及び下面は、XY平面と平行になっている。その他の構成は、前述した基本構造501と同様であるため、図面において、対応する構成部分には同様の符号を付し、その詳細な説明は省略する。
As shown in FIGS. 38 and 39, the
図40は、図38の基本構造502を用いた力覚センサ502cの一例を示す概略平面図である。図40に示す力覚センサ502cは、作用した力ないしモーメントによって生じる変形体40の弾性変形によって、内側面(原点Oに面する側面)に生じる径方向の変位を用いて、当該力ないしモーメントを計測するようになっている。この場合、図40に示すように、変形体540の内側面のうち、V軸及びW軸と重なる4つの部位に、それぞれ変位電極Em1〜Em4を設け、固定体510の外側面のうち、各変位電極Em1〜Em4に対向する部位に固定電極Ef1〜Ef4を設ければよい。このような構成によって、V軸上及びW軸上の4箇所に、4つの容量素子C1〜C4が構成される。本変形例による基本構造502を用いた力覚センサ502cでは、これら4つの容量素子C1〜C4に基づいて作用した力ないしモーメントを検出することになる。
FIG. 40 is a schematic plan view showing an example of a
以上のような力覚センサ502cを用いて作用した力ないしモーメントを計測するための具体的な原理は、例えば、本件出願人名義の特許第4948630号に記載されているため、ここでは、その詳細な説明は省略する。
The specific principle for measuring the force or moment acting using the
以上のような基本構造501、502は、受力体520、変形体40、540、接続部材531〜534及び固定体510が同心円状に、且つ、XY平面に沿って、配置されている。このため、基本構造501、502の各構成要素を切削加工によって一体的に成形することができる。このような加工により、ヒステリシスの無い力覚センサ501c、502cを提供することができる。
In the
<<< §6. その他の変形例 >>>
次に、図41及び図42を参照して、以上の各実施の形態による力覚センサないし基本構造に対して適用可能な変形体640の変形例について説明する。
<<<< §6. Other variants >>>
Next, with reference to FIGS. 41 and 42, a modification of the
図41は、矩形の変形体640を示す概略平面図である。また、図42は、図41の概略断面図であり、図42(a)は、図41の[42a]−[42a]線断面図であり、図42(b)は、図41の[42b]−[42b]線断面図である。
FIG. 41 is a schematic plan view showing a rectangular
本変形例による変形体640は、全体として矩形の形状を有している。ここでは、図41に示すように、正方形の変形体640を例に挙げて説明する。変形体640は、正のX軸上に位置する第1固定部641と、負のX軸上に位置する第2固定部642と、正のY軸上に位置する第1受力部643と、負のY軸上に位置する第2受力部644と、を有している。各固定部641、642及び各受力部643、644は、変形体640のうち固定体10及び受力体20が接続される領域であって、変形体640の他の領域と異なる特性を有する部位ではない。したがって、各固定部641、642及び各受力部643、644の材質は、変形体640の他の領域と同一である。但し、説明の便宜上、図面においては、変形体640の他の領域とは異なる色で示してある。
The
図41に示すように、変形体640は、更に、第1固定部641と第1受力部643との間(XY平面の第1象限)に位置する第1変形部645と、第1受力部643と第2固定部642との間(XY平面の第2象限)に位置する第2変形部646と、第2固定部642と第2受力部644との間(XY平面の第3象限)に位置する第3変形部647と、第2受力部644と第1固定部641との間(XY平面の第4象限)に位置する第4変形部648と、を有している。各変形部645〜648の両端は、隣接する固定部641、642及び受力部643、644にそれぞれ一体的に連結されている。このような構造によって、受力部43,44に作用した力ないしモーメントが確実に各変形部645〜648に伝達され、これによって、当該作用した力ないしモーメントに応じた弾性変形が各変形部645〜648に生じるようになっている。
As shown in FIG. 41, the
図41に示すように、第1〜第4変形部645〜648は、Z軸方向から見て全て直線状に構成されている。また、原点Oから各固定部641、642及び各受力部643、644までの距離は全て等しいため、各変形部645〜648は、それぞれ、正方形の一辺を構成するように配置されている。
As shown in FIG. 41, the first to
更に、図42(a)及び図42(b)に示すように、変形体640の各変形部645〜648は、Z軸負方向に膨出するように湾曲した湾曲部645c〜648cを有している。図示される例では、各変形部645〜648が全体として湾曲部645c〜648cを形成している。このため、図42(a)及び図42(b)では、変形部の符号と湾曲部の符号とを併記してある。図示されるように、第1湾曲部645cのうち最も下方(Z軸負方向)に位置する部位は、正のV軸上に存在している。そして、第1湾曲部645cの、第1固定部641から前記最も下方に位置する部位第に至るまでの形状は、第1受力部643から前記最も下方に位置する部位に至るまでの形状と同一である。換言すれば、第1湾曲部645cは、変形体640の長さ方向において、正のV軸に関して対称的な形状を有している。
Further, as shown in FIGS. 42A and 42B, each of the
このことは、残りの3つの湾曲部646c、647c、648cにおいても、同様である。すなわち、第2湾曲部646cは、最も下方に位置する部位が正のW軸上に存在しており、且つ、正のW軸に関して対称的な形状を有している。第3湾曲部647cは、最も下方に位置する部位が負のV軸上に存在しており、且つ、負のV軸に関して対称的な形状を有している。第4湾曲部648cは、最も下方に位置する部位が負のW軸上に存在しており、且つ、負のV軸に関して対称的な形状を有している。
This also applies to the remaining three
図42(a)及び図42(b)に示すように、変形体640には、第1〜第4湾曲部645c〜648cの最も下方に位置する部位に、すなわちZ軸方向から見て各湾曲部645c〜648cがV軸及びW軸と重なる部位の下部に、各湾曲部645c〜648cに生じる弾性変形を検出するための検出部位A1〜A4が規定されている。なお、図41では、検出部位A1〜A4が変形体640の上面(手前側の面)に設けられているように示されているが、実際は、変形体640の下面(奥側の面)に設けられている(図42参照)。
As shown in FIGS. 42 (a) and 42 (b), in the
<<< §7. 極板間の実効対向面積を一定に保つための工夫 >>>
以上の各力覚センサでは、各軸方向の力ないし各軸まわりのモーメントが作用した結果、固定電極に対する変位電極の相対位置が変化した場合にも、容量素子を構成する一対の電極の実効対向面積が変化しないように、各容量素子を構成する固定電極および変位電極のうちの一方の面積を他方の面積よりも大きく設定することも考えられる。これは、面積が小さい方の電極(例えば変位電極)の輪郭を、面積が大きい方の電極(例えば固定電極)の表面に当該電極の法線方向に投影して正射影投影像を形成した場合、面積が小さい方の電極の投影像が、面積が大きい方の電極の表面内に完全に含まれるような状態である。この状態が維持されれば、両電極によって構成される容量素子の実効面積は、小さい方の電極の面積に等しくなり、常に一定になる。すなわち、力の検出精度を向上させることができる。
<<<< §7. Device to keep the effective facing area between the plates constant >>>
In each of the force sensors described above, even if the relative position of the displacement electrode with respect to the fixed electrode changes as a result of the force in each axis direction or the moment around each axis acting, the effective opposing of the pair of electrodes forming the capacitive element It is conceivable to set the area of one of the fixed electrode and the displacement electrode forming each capacitance element to be larger than the area of the other so that the area does not change. This is when the contour of the electrode with the smaller area (for example, the displacement electrode) is projected on the surface of the electrode with the larger area (for example, the fixed electrode) in the normal direction of the electrode to form an orthogonal projection image. The projected image of the electrode having the smaller area is completely contained in the surface of the electrode having the larger area. If this state is maintained, the effective area of the capacitive element formed by both electrodes becomes equal to the area of the smaller electrode, and is always constant. That is, the force detection accuracy can be improved.
これまでに説明してきた各実施の形態及び変形例の各々は、対応する各図面に示されているように、固定電極の面積の方が変位電極の面積よりも大きく構成されている。 In each of the embodiments and modifications described above, the area of the fixed electrode is larger than the area of the displacement electrode, as shown in the corresponding drawings.
Claims (3)
XYZ三次元座標系に対して固定された円環状の固定体、および力ないしモーメントの作用により前記固定体に対して相対移動する円環状の受力体のうちいずれか一方の構成要素と、
前記一方の構成要素を取り囲むと共に当該構成要素に接続され、力ないしモーメントの作用により弾性変形を生じる変形部を含む変形体と、
前記変形体を取り囲むと共に当該変形体に接続され、前記固定体および前記受力体のうち他方の構成要素と、
前記変形体に生じる弾性変形に基づいて、前記受力体に作用した力ないしモーメントを示す電気信号を出力する検出回路と、を備え、
前記固定体、前記変形体及び前記受力体は、互いに同心であるように配置され、
前記変形体は、前記固定体に接続された2つの固定部と、前記受力体に接続され、当該変形体の周方向において前記固定部と交互に位置付けられた2つの受力部と、隣接する前記固定部と前記受力部との間に位置付けられた4つの変形部と、を有し、
前記検出回路は、前記変形部に設けられた少なくとも1つの電極を含む変位電極と、
前記固定体或いは前記受力体に設けられ、前記変位電極に対向するとともに少なくとも1つの電極を有する固定電極とを有し、
前記変位電極と前記固定電極のいずれか一方は少なくとも2つの電極を有することを特徴とする力覚センサ。 A force sensor for detecting at least one of a force in each axis direction and a moment about each axis in an XYZ three-dimensional coordinate system,
An annular fixed body fixed with respect to the XYZ three-dimensional coordinate system, and any one component of an annular force receiving body that moves relative to the fixed body by the action of force or moment,
A deformable body that surrounds the one component and is connected to the component, and includes a deformable portion that elastically deforms by the action of a force or a moment,
Surrounding the deformable body and connected to the deformable body, the other component of the fixed body and the force receiving body,
A detection circuit for outputting an electric signal indicating a force or a moment acting on the force receiving body based on elastic deformation of the deformable body,
The fixed body, the deformable body and the force receiving body are arranged so as to be concentric with each other,
The deformable body is adjacent to two fixed portions connected to the fixed body, two force receiving portions connected to the force receiving body and alternately positioned with the fixed portion in the circumferential direction of the deformable body. And four deformation portions positioned between the fixed portion and the force receiving portion,
The detection circuit, a displacement electrode including at least one electrode provided in the deformable portion,
The fixed body or the force receiving body, provided with a fixed electrode having at least one electrode facing the displacement electrode,
One of the displacement electrode and the fixed electrode has at least two electrodes.
前記固定電極が少なくとも2つの電極を有する場合、前記固定電極の一の電極と、前記変位電極の電極とにより第1の容量素子が構成され、前記固定電極の他の電極と、前記変位電極の電極とにより第2の容量素子が構成され、When the fixed electrode has at least two electrodes, one electrode of the fixed electrode and the electrode of the displacement electrode constitute a first capacitive element, and the other electrode of the fixed electrode and the electrode of the displacement electrode. A second capacitive element is formed by the electrode,
前記受力体に作用した力ないしモーメントによって、第1の容量素子が第1電気信号を出力し、第2の容量素子が第2電気信号を出力し、The first capacitive element outputs a first electric signal and the second capacitive element outputs a second electric signal by a force or a moment acting on the force receiving body,
第1電気信号と第2電気信号の変化に基づいて、前記力覚センサが正常に機能しているか否かを判断することを特徴とする請求項1に記載の力覚センサThe force sensor according to claim 1, wherein whether or not the force sensor is functioning normally is determined based on a change in the first electric signal and the second electric signal.
前記変形体の前記固定部、前記受力部、前記湾曲部は同一材料により一体に形成されている、The fixing portion, the force receiving portion, and the bending portion of the deformable body are integrally formed of the same material,
ことを特徴とする請求項1または2に記載の力覚センサ。The force sensor according to claim 1 or 2, characterized in that.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019117416A JP6685568B2 (en) | 2019-06-25 | 2019-06-25 | Force sensor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019117416A JP6685568B2 (en) | 2019-06-25 | 2019-06-25 | Force sensor |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019030866A Division JP6552026B2 (en) | 2019-02-22 | 2019-02-22 | Force sensor |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020052854A Division JP6804122B2 (en) | 2020-03-24 | 2020-03-24 | Force sensor |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019179039A JP2019179039A (en) | 2019-10-17 |
| JP2019179039A5 JP2019179039A5 (en) | 2020-03-26 |
| JP6685568B2 true JP6685568B2 (en) | 2020-04-22 |
Family
ID=68278394
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019117416A Active JP6685568B2 (en) | 2019-06-25 | 2019-06-25 | Force sensor |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6685568B2 (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020112569A (en) * | 2020-03-24 | 2020-07-27 | 株式会社トライフォース・マネジメント | Force sensor |
| JPWO2019155591A1 (en) * | 2018-02-09 | 2020-12-03 | 株式会社トライフォース・マネジメント | Force sensor |
| JP2021039129A (en) * | 2020-03-24 | 2021-03-11 | 株式会社トライフォース・マネジメント | Force sensor |
| JP2021119359A (en) * | 2020-11-25 | 2021-08-12 | 株式会社トライフォース・マネジメント | Force sensor |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7308548B2 (en) | 2021-02-18 | 2023-07-14 | 株式会社トライフォース・マネジメント | torque sensor |
| US20230152172A1 (en) * | 2021-02-18 | 2023-05-18 | Tri-Force Management Corporation | Torque sensor |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4398277A (en) * | 1981-07-27 | 1983-08-09 | Minnesota Mining And Manufacturing Company | Conductive elastomeric fabric and body strap |
| JPH07117470B2 (en) * | 1986-07-15 | 1995-12-18 | 株式会社リコー | Force detector |
| JPH0676933B2 (en) * | 1989-08-22 | 1994-09-28 | 株式会社昭和測器 | Maybe force / force detector |
| US5142906A (en) * | 1990-07-09 | 1992-09-01 | Westinghouse Electric Corp. | Apparatus for measuring valve stem loads in a motor operated valve assembly |
| JP4907050B2 (en) * | 2003-03-31 | 2012-03-28 | 株式会社ワコー | Force detection device |
| JP5568768B2 (en) * | 2003-03-31 | 2014-08-13 | 株式会社トライフォース・マネジメント | Force detection device |
| JP5490619B2 (en) * | 2010-06-09 | 2014-05-14 | 東亜バルブエンジニアリング株式会社 | Thrust torque sensor for valves |
| JP4948630B2 (en) * | 2010-08-05 | 2012-06-06 | 株式会社トライフォース・マネジメント | Torque sensor |
| WO2013014803A1 (en) * | 2011-07-27 | 2013-01-31 | 株式会社トライフォース・マネジメント | Dynamic sensor |
| JP6092326B2 (en) * | 2015-07-29 | 2017-03-08 | 株式会社トライフォース・マネジメント | Torque sensor |
| JP6308605B1 (en) * | 2017-03-06 | 2018-04-11 | 株式会社トライフォース・マネジメント | Force sensor |
| JP6404514B2 (en) * | 2018-03-05 | 2018-10-10 | 株式会社トライフォース・マネジメント | Force sensor |
| JP6494056B2 (en) * | 2018-08-22 | 2019-04-03 | 株式会社トライフォース・マネジメント | Force sensor |
-
2019
- 2019-06-25 JP JP2019117416A patent/JP6685568B2/en active Active
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2019155591A1 (en) * | 2018-02-09 | 2020-12-03 | 株式会社トライフォース・マネジメント | Force sensor |
| JP2020112569A (en) * | 2020-03-24 | 2020-07-27 | 株式会社トライフォース・マネジメント | Force sensor |
| JP2021039129A (en) * | 2020-03-24 | 2021-03-11 | 株式会社トライフォース・マネジメント | Force sensor |
| JP2021119359A (en) * | 2020-11-25 | 2021-08-12 | 株式会社トライフォース・マネジメント | Force sensor |
| JP7055501B2 (en) | 2020-11-25 | 2022-04-18 | 株式会社トライフォース・マネジメント | Force sensor |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019179039A (en) | 2019-10-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6308605B1 (en) | Force sensor | |
| JP6685568B2 (en) | Force sensor | |
| JP6404514B2 (en) | Force sensor | |
| JP6494056B2 (en) | Force sensor | |
| JP6552026B2 (en) | Force sensor | |
| JP6923988B2 (en) | Force sensor | |
| JP6214072B1 (en) | Force sensor | |
| WO2018029866A1 (en) | Force sensor | |
| JP6804122B2 (en) | Force sensor | |
| US10571346B2 (en) | Force sensor | |
| JP6241982B1 (en) | Force sensor | |
| JP6600824B2 (en) | Force sensor | |
| JP6710404B2 (en) | Force sensor | |
| JP6644307B2 (en) | Force sensor | |
| JP6784432B1 (en) | Force sensor | |
| JP6893717B2 (en) | Force sensor | |
| JP7105518B2 (en) | force sensor | |
| JP6896309B2 (en) | Force sensor | |
| JP6771797B2 (en) | Force sensor | |
| JP6923991B2 (en) | Force sensor | |
| JP6685528B2 (en) | Force sensor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200212 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200212 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200228 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200325 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6685568 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |