JP6600824B2 - Force sensor - Google Patents
Force sensor Download PDFInfo
- Publication number
- JP6600824B2 JP6600824B2 JP2017027055A JP2017027055A JP6600824B2 JP 6600824 B2 JP6600824 B2 JP 6600824B2 JP 2017027055 A JP2017027055 A JP 2017027055A JP 2017027055 A JP2017027055 A JP 2017027055A JP 6600824 B2 JP6600824 B2 JP 6600824B2
- Authority
- JP
- Japan
- Prior art keywords
- axis
- elastic deformation
- force
- detection
- force sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images































Description
本発明は、力覚センサに関し、特に、所定の軸方向に作用した力及び所定の回転軸まわりに作用したモーメント(トルク)を電気信号として出力する機能をもったセンサに関する。 The present invention relates to a force sensor, and more particularly to a sensor having a function of outputting a force acting in a predetermined axial direction and a moment (torque) acting around a predetermined rotation axis as an electrical signal.
所定の軸方向に沿って作用した力及び所定の回転軸まわりに作用したモーメントを電気信号として出力する機能をもった力覚センサが、例えば特許文献1に記載されており、産業用ロボットの力制御に広く利用されている。近年では、生活支援ロボットへも採用されている。このような状況から、検出対象の力ないしモーメントの大きさが広範囲に亘っており、このような広範囲の力ないしモーメントを高精度且つ高感度に計測可能な力覚センサの開発が進められている。
A force sensor having a function of outputting, as an electrical signal, a force acting along a predetermined axial direction and a moment acting around a predetermined rotation axis is described in, for example,
ところで、力覚センサとしては、容量素子の静電容量値の変動量に基づいて力ないしモーメントを検出する静電容量タイプの力覚センサや、歪ゲージの電気抵抗値の変動量に基づいて力ないしモーメントを検出する歪ゲージタイプの力覚センサが利用されている。このため、静電容量タイプとして構成しても、歪ゲージタイプとして構成しても、高精度且つ高感度で力ないしモーメントの検出が可能な力覚センサを提供できれば、便利である。 By the way, as a force sensor, a capacitance type force sensor that detects a force or a moment based on a variation amount of a capacitance value of a capacitive element, or a force based on a variation amount of an electric resistance value of a strain gauge. Strain gauge type force sensors that detect moments are also used. Therefore, it is convenient if a force sensor capable of detecting force or moment with high accuracy and high sensitivity can be provided regardless of whether it is configured as a capacitance type or a strain gauge type.
本発明は、以上のような事情に鑑みて創案されたものである。すなわち、本発明の目的は、静電容量タイプとして構成しても、歪ゲージタイプとして構成しても、高精度且つ高感度で力ないしモーメントの検出が可能な力覚センサを提供することである。 The present invention has been made in view of the above circumstances. That is, an object of the present invention is to provide a force sensor capable of detecting force or moment with high accuracy and high sensitivity, regardless of whether it is configured as a capacitance type or a strain gauge type. .
本発明は、一軸方向の力を検出する力覚センサであって、
固定部と、
力の作用により前記固定部に対して相対移動する可動部と、
前記固定部と前記可動部とに接続され、前記可動部が前記固定部に対して相対移動することにより前記一軸方向とは非平行な方向に弾性変形を生じる変形体と、
前記変形体に生じる弾性変形に基づいて、前記可動部に作用した力を示す電気信号を出力する検出回路と、を備え、
前記変形体は、第1バネ定数を有する第1検出部位と、前記第1バネ定数とは異なる第2バネ定数を有する第2検出部位と、を含み、
前記検出回路は、前記第1検出部位及び前記第2検出部位の少なくとも一方に生じる弾性変形に基づいて、前記電気信号を出力する
ことを特徴とする力覚センサである。
The present invention is a force sensor for detecting a uniaxial force,
A fixed part;
A movable part that moves relative to the fixed part by the action of force;
A deformable body connected to the fixed portion and the movable portion, and causing elastic deformation in a direction non-parallel to the uniaxial direction as the movable portion moves relative to the fixed portion;
A detection circuit that outputs an electric signal indicating a force acting on the movable part based on elastic deformation generated in the deformable body;
The deformable body includes a first detection part having a first spring constant and a second detection part having a second spring constant different from the first spring constant,
The detection circuit is a force sensor that outputs the electrical signal based on elastic deformation generated in at least one of the first detection portion and the second detection portion.
本発明によれば、バネ定数が相対的に小さい検出部位、すなわち相対的に大きい弾性変形が生じる検出部位に容量素子を配置することにより、高精度且つ高感度で力の検出が能な力覚センサを提供することができる。更に、バネ定数が相対的に大きい検出部位、すなわち弾性変形に伴って発現する応力が相対的に大きい検出部位に歪ゲージを配置することにより、高精度且つ高感度で力の検出が可能な力覚センサを提供することができる。以上から、本発明によれば、静電容量タイプとして構成しても、歪ゲージタイプとして構成しても、高精度且つ高感度で力の検出が可能な力覚センサを提供することができる。 According to the present invention, the capacitive element is arranged at a detection portion having a relatively small spring constant, that is, a detection portion where relatively large elastic deformation occurs, thereby enabling a force sense that can detect force with high accuracy and high sensitivity. A sensor can be provided. In addition, a strain gauge is placed at a detection site with a relatively large spring constant, that is, a detection site with a relatively large stress due to elastic deformation, so that the force can be detected with high accuracy and high sensitivity. A sense sensor can be provided. As described above, according to the present invention, it is possible to provide a force sensor capable of detecting a force with high accuracy and high sensitivity regardless of whether it is configured as a capacitance type or a strain gauge type.
前記第1検出部位及び前記第2検出部位は、前記可動部と前記固定部との間に並列に配置されていて良い。この場合、第1検出部位及び第2検出部位に大きな変形を生じさせることができるため、作用した力をより高精度且つ高感度で検出することができる。 The first detection part and the second detection part may be arranged in parallel between the movable part and the fixed part. In this case, since the first detection site and the second detection site can be greatly deformed, the applied force can be detected with higher accuracy and higher sensitivity.
前記第1検出部位は、所定の半径を有する円弧の一部に沿った形状を有し、
前記第2検出部位は、前記所定の半径とは異なる半径を有する円弧の一部に沿った形状を有していて良い。この場合、第1検出部位及び第2検出部位に、作用した力と直交する方向に変位を生じさせることができるため、力の計測が容易である。
The first detection portion has a shape along a part of an arc having a predetermined radius,
The second detection portion may have a shape along a part of an arc having a radius different from the predetermined radius. In this case, since it is possible to cause displacement in the first detection site and the second detection site in a direction orthogonal to the applied force, the force can be easily measured.
以上の力覚センサは、静電容量タイプとして構成することができる。すなわち、力覚センサは、前記第1検出部位及び前記第2検出部位の少なくとも一方に配置された変位電極と、
前記変位電極に対向して配置され、前記固定部に対して相対移動しない固定電極と、を更に備え、
前記変位電極と前記固定電極とは、容量素子を構成し、
前記検出回路は、前記容量素子の静電容量値の変動量に基づいて、前記可動部に作用した力を示す電気信号を出力するようになっていて良い。
The force sensor described above can be configured as a capacitance type. That is, the force sensor includes a displacement electrode disposed on at least one of the first detection portion and the second detection portion;
A fixed electrode that is disposed opposite to the displacement electrode and does not move relative to the fixed portion;
The displacement electrode and the fixed electrode constitute a capacitive element,
The detection circuit may be configured to output an electrical signal indicating a force acting on the movable portion based on a variation amount of the capacitance value of the capacitive element.
あるいは、以上の力覚センサは歪ゲージタイプとして構成することができる。すなわち、力覚センサは、前記第1検出部位及び前記第2検出部位の少なくとも一方に、歪ゲージが設けられ、
前記検出回路は、前記歪ゲージの電気抵抗値の変動量に基づいて、前記可動部に作用した力を示す電気信号を出力するようになっていて良い。
Alternatively, the above force sensor can be configured as a strain gauge type. That is, the force sensor is provided with a strain gauge in at least one of the first detection site and the second detection site,
The detection circuit may be configured to output an electric signal indicating a force acting on the movable part based on a variation amount of the electric resistance value of the strain gauge.
また、前記第1検出部位は、第1変位部と、前記第1変位部の両側に設けられ、前記固定部及び前記可動部にそれぞれ接続された一対の第1変形部と、を有し、
前記第2検出部位は、第2変位部と、前記第2変位部の両側に設けられ、前記固定部及び前記可動部にそれぞれ接続された一対の第2変形部と、を有していて良い。
The first detection part includes a first displacement part and a pair of first deformation parts provided on both sides of the first displacement part and connected to the fixed part and the movable part, respectively.
The second detection portion may include a second displacement portion and a pair of second deformation portions provided on both sides of the second displacement portion and respectively connected to the fixed portion and the movable portion. .
この場合、比較的小さいスペースで、作用した力と直交する方向の変位を第1検出部位及び第2検出部位に生じさせることができる。 In this case, the displacement in the direction orthogonal to the applied force can be generated in the first detection site and the second detection site in a relatively small space.
このような第1検出部位及び第2検出部位を有する力覚センサにおいては、高精度且つ高感度の静電容量タイプの力覚センサを提供することが容易である。すなわち、前記第1検出部位の前記第1変位部及び前記第2検出部位の前記第2変位部の少なくとも一方に配置された変位電極と、
前記変位電極に対向して配置され、前記固定部に対して相対移動しない固定電極と、を更に備え、
前記変位電極と前記固定電極とは、容量素子を構成し、
前記検出回路は、前記容量素子の静電容量値の変動量に基づいて、前記可動部に作用した前記一軸方向の力を示す電気信号を出力するようになっていて良い。
In the force sensor having such a first detection part and a second detection part, it is easy to provide a highly accurate and sensitive electrostatic force type force sensor. That is, a displacement electrode disposed on at least one of the first displacement portion of the first detection portion and the second displacement portion of the second detection portion;
A fixed electrode that is disposed opposite to the displacement electrode and does not move relative to the fixed portion;
The displacement electrode and the fixed electrode constitute a capacitive element,
The detection circuit may be configured to output an electric signal indicating the uniaxial force acting on the movable portion based on a variation amount of the capacitance value of the capacitive element.
もちろん、このような第1検出部位及び第2検出部位を有する力覚センサを歪ゲージタイプとして構成することも可能である。すなわち、前記第1変位部及び前記第2変位部のうち少なくとも一方は、弾性を有する材料から構成され、その表面に歪ゲージが配置され、
前記検出回路は、前記歪ゲージの電気抵抗値の変動量に基づいて、前記可動部に作用した前記一軸方向の力を示す電気信号を出力するようになっていて良い。
Of course, a force sensor having such a first detection site and a second detection site can be configured as a strain gauge type. That is, at least one of the first displacement portion and the second displacement portion is made of an elastic material, and a strain gauge is disposed on the surface thereof.
The detection circuit may be configured to output an electrical signal indicating the uniaxial force acting on the movable portion based on a variation amount of the electrical resistance value of the strain gauge.
あるいは、本発明は、XYZ三次元座標系における各軸方向の力及び各軸まわりのモーメントのうち少なくとも1つを検出する力覚センサであって、
XYZ三次元座標系に対して固定された固定部と、
力ないしモーメントの作用により前記固定部に対して相対移動する可動部と、
前記固定部と前記可動部とに接続され、前記可動部が前記固定部に対して相対移動することにより弾性変形を生じる変形体と、
前記変形体に生じる弾性変形に基づいて、前記可動部に作用した力ないしモーメントを示す電気信号を出力する検出回路と、を備え、
前記変形体は、
力ないしモーメントの作用により弾性変形を生じる材質からなり、第1貫通開口部を有する環状の第1変形体と、
力ないしモーメントの作用により弾性変形を生じる材質からなり、第2貫通開口部を有し、前記第1変形体を取り囲む環状の第2変形体と、を有し、
前記第1変形体及び前記第2変形体は、連結部材によって連結され、
前記第1変形体は、第1バネ定数を有する少なくとも1つの第1検出部位を有し、
前記第2変形体は、前記第1バネ定数とは異なる第2バネ定数を有する少なくとも1つの第2検出部位を有し、
前記検出回路は、前記第1検出部位及び前記第2検出部位の少なくとも一方に生じる弾性変形に基づいて、前記電気信号を出力することを特徴とする力覚センサである。
Alternatively, the present invention is a force sensor that detects at least one of a force in each axial direction and a moment around each axis in an XYZ three-dimensional coordinate system,
A fixed part fixed with respect to the XYZ three-dimensional coordinate system;
A movable part that moves relative to the fixed part by the action of force or moment;
A deformable body that is connected to the fixed portion and the movable portion, and generates elastic deformation when the movable portion moves relative to the fixed portion;
A detection circuit that outputs an electric signal indicating a force or a moment acting on the movable part based on elastic deformation generated in the deformable body;
The deformation body is
An annular first deformable body made of a material that is elastically deformed by the action of a force or moment and having a first through opening;
Made of a material that undergoes elastic deformation by the action of force or moment, has a second through opening, and has an annular second deformable body surrounding the first deformable body,
The first deformable body and the second deformable body are connected by a connecting member,
The first deformation body has at least one first detection portion having a first spring constant,
The second deformable body has at least one second detection portion having a second spring constant different from the first spring constant,
The detection circuit is a force sensor that outputs the electrical signal based on elastic deformation generated in at least one of the first detection portion and the second detection portion.
本発明によれば、バネ定数が相対的に小さい検出部位、すなわち相対的に大きい弾性変形が生じる検出部位に容量素子を配置することにより、高精度且つ高感度で力ないしモーメントの検出が可能な力覚センサを提供することができる。更に、バネ定数が相対的に大きい検出部位、すなわち弾性変形に伴って発現する応力が相対的に大きい検出部位に歪ゲージを配置することにより、高精度且つ高感度で力ないしモーメントの検出が可能な力覚センサを提供することができる。異常から、本発明によれば、静電容量タイプとして構成しても、歪ゲージタイプとして構成しても、高精度且つ高感度で力ないしモーメントの検出が可能な力覚センサを提供することができる。 According to the present invention, it is possible to detect a force or a moment with high accuracy and high sensitivity by disposing a capacitive element in a detection portion where the spring constant is relatively small, that is, a detection portion where relatively large elastic deformation occurs. A force sensor can be provided. In addition, it is possible to detect force or moment with high accuracy and high sensitivity by placing strain gauges at detection sites with relatively large spring constants, that is, detection sites with relatively large stresses that occur due to elastic deformation. Can provide a simple force sensor. According to the present invention, it is possible to provide a force sensor capable of detecting force or moment with high accuracy and high sensitivity regardless of whether it is configured as a capacitance type or a strain gauge type. it can.
前記第1変形体及び前記第2変形体は、共に円環状であり、互いに同心であって良い。この場合、簡易な構成で力覚センサを構成することができる。 The first deformable body and the second deformable body are both annular and may be concentric with each other. In this case, the force sensor can be configured with a simple configuration.
以上の力覚センサは、静電容量タイプとして構成することができる。すなわち、前記第1変形体の前記第1検出部位及び前記第2変形体の前記第2検出部位の少なくとも一方に配置された変位電極と、
前記変位電極に対向して配置され、前記固定部に対して相対移動しない固定電極と、を更に備え、
前記変位電極と前記固定電極とは、容量素子を構成し、
前記検出回路は、前記容量素子の静電容量値の変動量に基づいて、作用した力ないしモーメントを示す電気信号を出力するようになっていて良い。
The force sensor described above can be configured as a capacitance type. That is, a displacement electrode disposed on at least one of the first detection portion of the first deformable body and the second detection portion of the second deformable body,
A fixed electrode that is disposed opposite to the displacement electrode and does not move relative to the fixed portion;
The displacement electrode and the fixed electrode constitute a capacitive element,
The detection circuit may be configured to output an electric signal indicating an applied force or moment based on a variation amount of the capacitance value of the capacitive element.
あるいは、以上の力覚センサは歪ゲージタイプとして構成することができる。すなわち、前記第1変形体及び前記第2変形体の少なくとも一方に歪ゲージが設けられ、
前記検出回路は、前記歪ゲージの電気抵抗値の変動量に基づいて、作用した力ないしモーメントを示す電気信号を出力するようになっていて良い。
Alternatively, the above force sensor can be configured as a strain gauge type. That is, a strain gauge is provided on at least one of the first deformation body and the second deformation body,
The detection circuit may be configured to output an electric signal indicating an applied force or moment based on a fluctuation amount of the electric resistance value of the strain gauge.
前記連結部材は、Z軸方向から見て、正のX軸が前記第1変形体及び前記第2変形体に重なる2つの部位を接続する第1連結部材と、正のY軸が前記第1変形体及び前記第2変形体に重なる2つの部位を接続する第2連結部材と、負のXが前記第1変形体及び前記第2変形体に重なる2つの部位を接続する第3連結部材と、負のY軸が前記第1変形体及び前記第2変形体に重なる2つの部位を接続する第4連結部材と、を有していて良い。 The connecting member includes a first connecting member that connects two portions where the positive X-axis overlaps the first deformable body and the second deformable body as viewed from the Z-axis direction; A second connecting member that connects the two parts that overlap the deformable body and the second deformable body, and a third connecting member that connects the two parts that the negative X overlaps the first and second deformable bodies; And a fourth connecting member that connects two portions where the negative Y axis overlaps the first deformable body and the second deformable body.
更に、XY平面上に、原点Oを通りX軸およびY軸に対して45°をなすV軸およびW軸を定義した場合に、
前記第1変形体は、Z軸方向から見てV軸及びW軸に重なる4つの部位に前記第1検出部位を有し、
前記第2変形体は、Z軸方向から見てV軸及びW軸に重なる4つの部位に前記第2検出部位を有していて良い。
Furthermore, on the XY plane, when the V axis and the W axis that define 45 ° with respect to the X axis and the Y axis through the origin O are defined,
The first deformation body has the first detection part in four parts overlapping the V axis and the W axis when viewed from the Z-axis direction,
The second deformable body may have the second detection part at four parts overlapping the V axis and the W axis when viewed from the Z-axis direction.
この場合、作用した力ないしモーメントによって第1変形体及び第2変形体に対称的な弾性変形が生じるため、当該力ないしモーメントの検知が容易である。 In this case, since the symmetrical deformation is generated in the first deformable body and the second deformable body due to the applied force or moment, the force or moment can be easily detected.
また、前記第1変形体は、少なくとも1つの第1間隙を有し、
前記第1検出部位は、前記第1間隙内に介在し、
前記第1検出部位は、第1変位部と、前記第1変位部の両側に設けられ対応する第1間隙両端部に接続された一対の第1変形部と、を有し、
前記第2変形体は、少なくとも1つの第2間隙を有し、
前記第2検出部位は、前記第2間隙内に介在し、
前記第2検出部位は、第2変位部と、前記第2変位部の両側に設けられ対応する第2間隙両端部に接続された一対の第2変形部と、を有していて良い。
The first deformation body has at least one first gap,
The first detection site is interposed in the first gap,
The first detection portion includes a first displacement portion and a pair of first deformation portions provided on both sides of the first displacement portion and connected to the corresponding first gap both ends,
The second deformable body has at least one second gap;
The second detection site is interposed in the second gap,
The second detection portion may include a second displacement portion and a pair of second deformation portions provided on both sides of the second displacement portion and connected to both ends of the corresponding second gap.
この場合、比較的小さいスペースで、作用した力と直交する方向の変位を第1検出部位及び第2検出部位に生じさせることができる。 In this case, the displacement in the direction orthogonal to the applied force can be generated in the first detection site and the second detection site in a relatively small space.
このような第1検出部位及び第2検出部位を有する力覚センサにおいては、高精度且つ高感度の静電容量タイプの力覚センサを提供することが容易である。すなわち、前記第1検出部位の各第1変位部及び前記第2検出部位の各第2変位部の少なくとも一方に配置された変位電極と、
前記変位電極に対向して配置され、前記固定部に対して相対移動しない固定電極と、を更に備え、
前記変位電極と前記固定電極とは、容量素子を構成し、
前記検出回路は、前記容量素子の静電容量値の変動量に基づいて、前記可動部に作用した力ないしモーメントを示す電気信号を出力するようになっていて良い。
In the force sensor having such a first detection part and a second detection part, it is easy to provide a highly accurate and sensitive electrostatic force type force sensor. That is, a displacement electrode disposed on at least one of each first displacement portion of the first detection site and each second displacement portion of the second detection site;
A fixed electrode that is disposed opposite to the displacement electrode and does not move relative to the fixed portion;
The displacement electrode and the fixed electrode constitute a capacitive element,
The detection circuit may be configured to output an electric signal indicating a force or a moment acting on the movable part based on a fluctuation amount of a capacitance value of the capacitive element.
もちろん、このような第1検出部位及び第2検出部位を有する力覚センサを歪ゲージタイプとして構成することも可能である。すなわち、各第1変位部及び各第2変位部のうち少なくとも一方は、弾性を有する材料から構成され、その表面に歪ゲージが配置され、
前記検出回路は、前記歪ゲージの電気抵抗値の変動量に基づいて、前記可動部に作用した前記一軸方向の力を示す電気信号を出力するようになっていて良い。
Of course, a force sensor having such a first detection site and a second detection site can be configured as a strain gauge type. That is, at least one of each first displacement portion and each second displacement portion is made of an elastic material, and a strain gauge is disposed on the surface thereof.
The detection circuit may be configured to output an electrical signal indicating the uniaxial force acting on the movable portion based on a variation amount of the electrical resistance value of the strain gauge.
また、他の例においては、各第1検出部位は、前記第1変形体のうちの他の領域よりも肉厚が薄く、
各第2検出部位は、前記第2変形体のうちの他の領域よりも肉厚が薄くなっていて良い。
In another example, each first detection site is thinner than other regions of the first deformation body,
Each second detection site may be thinner than other regions of the second deformable body.
この場合、第1検出部位及び第2検出部位に生じる弾性変形の程度を所望に調整することができるため、より高精度且つ高感度の力覚センサを提供することができる。 In this case, since the degree of elastic deformation occurring in the first detection site and the second detection site can be adjusted as desired, a force sensor with higher accuracy and sensitivity can be provided.
以上のような力覚センサにおいて、前記第1検出部位及び前記第2検出部位は、円弧状の形状を有していて良い。この場合にも、比較的小さいスペースで、作用した力と直交する方向の変位を第1検出部位及び第2検出部位に生じさせることができる。 In the force sensor as described above, the first detection site and the second detection site may have an arc shape. Also in this case, the displacement in the direction orthogonal to the applied force can be generated in the first detection site and the second detection site in a relatively small space.
あるいは、本発明によれば、単一の力覚センサによって、当該力覚センサの故障診断を行うことが可能である。すなわち、このような力覚センサは、一軸方向の力を検出するものであって、
固定部と、
力の作用により前記固定部に対して相対移動する可動部と、
前記固定部と前記可動部とに接続され、前記可動部が前記固定部に対して相対移動することにより前記一軸方向とは非平行な方向に弾性変形を生じる変形体と、
前記変形体に生じる弾性変形に基づいて、前記可動部に作用した力を示す電気信号を出力する検出回路と、を備え、
前記変形体は、第1バネ定数を有する第1検出部位と、前記第1バネ定数とは異なる第2バネ定数を有する第2検出部位と、を含み、
前記検出回路は、
前記電気信号として、前記第1検出部位に生じる弾性変形に基づいて提供される第1電気信号と、前記第2検出部位に生じる弾性変形に基づいて提供される第2電気信号と、を出力し、
前記第1電気信号及び前記第2電気信号に基づいて、当該力覚センサが正常に機能しているか否かを判定する、という力覚センサである。
Alternatively, according to the present invention, failure diagnosis of the force sensor can be performed with a single force sensor. That is, such a force sensor detects a uniaxial force,
A fixed part;
A movable part that moves relative to the fixed part by the action of force;
A deformable body connected to the fixed portion and the movable portion, and causing elastic deformation in a direction non-parallel to the uniaxial direction as the movable portion moves relative to the fixed portion;
A detection circuit that outputs an electric signal indicating a force acting on the movable part based on elastic deformation generated in the deformable body;
The deformable body includes a first detection part having a first spring constant and a second detection part having a second spring constant different from the first spring constant,
The detection circuit includes:
As the electrical signal, a first electrical signal provided based on elastic deformation occurring in the first detection site and a second electrical signal provided based on elastic deformation occurring in the second detection site are output. ,
The force sensor is configured to determine whether or not the force sensor is functioning normally based on the first electric signal and the second electric signal.
あるいは、故障診断が可能な力覚センサは、XYZ三次元座標系における各軸方向の力及び各軸まわりのモーメントのうち少なくとも1つを検出するものであって、
XYZ三次元座標系に対して固定された固定部と、
力ないしモーメントの作用により前記固定部に対して相対移動する可動部と、
前記固定部と前記可動部とに接続され、前記可動部が前記固定部に対して相対移動することにより弾性変形を生じる変形体と、
前記変形体に生じる弾性変形に基づいて、前記可動部に作用した力ないしモーメントを示す電気信号を出力する検出回路と、を備え、
前記変形体は、
力ないしモーメントの作用により弾性変形を生じる材質からなり、第1貫通開口部を有する環状の第1変形体と、
力ないしモーメントの作用により弾性変形を生じる材質からなり、第2貫通開口部を有し、前記第1変形体を取り囲む環状の第2変形体と、を有し、
前記第1変形体及び前記第2変形体は、連結部材によって連結され、
前記第1変形体は、第1バネ定数を有する少なくとも1つの第1検出部位を有し、
前記第2変形体は、前記第1バネ定数とは異なる第2バネ定数を有する少なくとも1つの第2検出部位を有し、
前記検出回路は、
前記電気信号として、前記第1検出部位に生じる弾性変形に基づいて提供される第1電気信号と、前記第2検出部位の少なくとも一方に生じる弾性変形に基づいて提供される第2電気信号と、を出力し、
前記第1電気信号及び前記第2電気信号に基づいて、当該力覚センサが正常に機能しているか否かを判定する、という力覚センサである。
Alternatively, the force sensor capable of fault diagnosis detects at least one of a force in each axial direction and a moment around each axis in an XYZ three-dimensional coordinate system,
A fixed part fixed with respect to the XYZ three-dimensional coordinate system;
A movable part that moves relative to the fixed part by the action of force or moment;
A deformable body that is connected to the fixed portion and the movable portion, and generates elastic deformation when the movable portion moves relative to the fixed portion;
A detection circuit that outputs an electric signal indicating a force or a moment acting on the movable part based on elastic deformation generated in the deformable body;
The deformation body is
An annular first deformable body made of a material that is elastically deformed by the action of a force or moment and having a first through opening;
Made of a material that undergoes elastic deformation by the action of force or moment, has a second through opening, and has an annular second deformable body surrounding the first deformable body,
The first deformable body and the second deformable body are connected by a connecting member,
The first deformation body has at least one first detection portion having a first spring constant,
The second deformable body has at least one second detection portion having a second spring constant different from the first spring constant,
The detection circuit includes:
As the electrical signal, a first electrical signal provided based on elastic deformation occurring in the first detection site, and a second electrical signal provided based on elastic deformation occurring in at least one of the second detection sites, Output
The force sensor is configured to determine whether or not the force sensor is functioning normally based on the first electric signal and the second electric signal.
これらの力覚センサにおいて、前記検出回路は、力覚センサが正常に機能している状態における第1電気信号と第2電気信号との比率を基準比率として記憶する記憶部を有し、「第1電気信号と第2電気信号との比率と、基準比率と、の差」が所定の範囲内にあるか否かを判定することによって、力覚センサが正常に機能しているか否かを判定するようになっていて良い。この場合、力覚センサの故障を確実に判定することができる。なお、この判定の原理については、後に詳述される。 In these force sensors, the detection circuit includes a storage unit that stores a ratio of the first electric signal and the second electric signal in a state where the force sensor is functioning normally as a reference ratio. It is determined whether or not the force sensor is functioning normally by determining whether or not the “difference between the ratio between the first electric signal and the second electric signal and the reference ratio” is within a predetermined range. You may be supposed to. In this case, the failure of the force sensor can be reliably determined. The principle of this determination will be described later in detail.
<<< §1. 本発明の第1の実施の形態による力覚センサ >>>
以下に、添付の図面を参照して、本発明の第1の実施の形態による力覚センサについて詳細に説明する。
<<< §1. Force sensor according to the first embodiment of the present invention >>>
Hereinafter, a force sensor according to a first embodiment of the present invention will be described in detail with reference to the accompanying drawings.
< 1−1. 基本構造 >
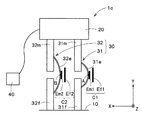
図1は、本発明の第1の実施の形態による力覚センサの基本構造1を示す概略上面図である。本図においては、左右方向にX軸が、上下方向にY軸が、奥行き方向にZ軸が、それぞれ定められているものとする。図1に示すように、基本構造1は、固定部10と、力の作用により固定部10に対してY軸方向に沿って相対移動する可動部20と、固定部10と可動部20とに接続され、可動部20が固定部10に対して相対移動することにより弾性変形を生じる変形体30と、を備えている。
<1-1. Basic structure>
FIG. 1 is a schematic top view showing a
本実施の形態による基本構造1は、Y軸方向の力の検出が可能な力覚センサに利用されるものである。図1に示すように、固定部10と可動部20とは、Y軸方向に所定の間隔を空けて配置されている。可動部20は、力を受ける受力体として機能するようになっている。
The
固定部10と可動部20とに接続された変形体30は、X軸方向に並列に配置された第1変形体31及び第2変形体32を有している。第1変形体31は、固定部10に接続された第1固定部側接続部31fと、可動部20に接続されY軸方向において第1固定部側接続部31fから離間して配置された第1可動部側接続部31mと、第1固定部側接続部31f及び第1可動部側接続部31mを接続する弾性変形可能な円弧状の第1弾性体31eと、を有している。第2変形体32は、固定部10に接続された第2固定部側接続部32fと、可動部20に接続されY軸方向において第2固定部側接続部32fから離間して配置された第2可動部側接続部32mと、第2固定部側接続部32f及び第2可動部側接続部32mを接続する弾性変形可能な円弧状の第2弾性体32eと、を有している。本実施の形態では、図1に示すように、第1弾性体31e及び第2弾性体32eは、共にX軸負方向(図1における右方向)に凸となるように配置されている。
The
第1弾性体31e及び第2弾性体32eには、最もX軸負方向側(図1における右側)に位置する部位、すなわち、第1弾性体31e及び第2弾性体32eのX軸負側の部位のうちZ軸方向から見てY軸と平行な接線を与える部位に、それぞれ第1検出部位A及び第2検出部位Bが規定されている。図1に示す基本構造1が力覚センサとして使用される際には、これら第1検出部位A及び第2検出部位Bに生じる応力ないしX軸方向の変位に基づいて、可動部20に作用した力が計測されるようになっている。図1に示すように、第1弾性体31e及び第2弾性体32eは、曲率半径が互いに異なっている。具体的には、第1弾性体31eの曲率半径よりも第2弾性体32eの曲率半径の方が大きい。その一方で、図示されていないが、第1弾性体31e及び第2弾性体32eは、XZ平面で切断した断面形状が同一となっている。このことにより、第2弾性体32eのバネ定数の方が第1弾性体31eのバネ定数よりも小さくなっている。ここで、第1弾性体31e及び第2弾性体32eのバネ定数とは、可動部20に作用したY軸方向の力の大きさを検出部位A、Bに生じたX軸方向の変位の大きさで除した値を、意味している。
The first
図2は、図1の基本構造1の可動部20がZ軸負方向に100μmだけ変位したときに各検出部位A、Bに生じる、X軸方向の変位とY軸方向の応力とを示す図表である。
FIG. 2 is a chart showing the displacement in the X-axis direction and the stress in the Y-axis direction that occur at each detection site A and B when the
図2に示すように、力の作用によって固定部10に対して可動部20がY軸負方向(図1における下方)に変位(相対移動)した場合に、各検出部位A、Bに生じる、X軸方向の変位とY軸方向の応力とが、それぞれ異なっている。具体的には、固定部10に対して可動部20がY軸負方向に100μmだけ相対移動した場合、X軸方向に生じる変位の大きさは、第1検出部位Aよりも第2検出部位Bの方が大きく、応力は、第2検出部Bよりも第1検出部位Aの方が大きい。このことから、図1に示す基本構造1は、変位について見ると第1検出部位Aよりも第2検出部位Bの方が高感度であり、応力について見ると第2検出部位Bよりも第1検出部位Aの方が高感度である、という特性を有している。
As shown in FIG. 2, when the
< 1−2. 静電容量タイプの力覚センサ >
次に、以上のような基本構造1を用いた静電容量タイプの力覚センサ1cについて説明する。
<1-2. Capacitance type force sensor>
Next, a capacitance
図3は、図1の基本構造1による静電容量タイプの力覚センサ1cを示す概略上面図である。図3に示すように、力覚センサ1cは、第1検出部位Aに配置された第1変位電極Em1と、第1変位電極Em1に対向して配置され、固定部10に対して相対移動しない第1固定電極Ef1と、第2検出部位Bに配置された第2変位電極Em2と、第2変位電極Em2に対向して配置され、固定部10に対して相対移動しない第2固定電極Ef2と、を有している。図1に示すように、第1変位電極Em1及び第1固定電極Ef1は、第1容量素子C1を構成し、第2変位電極Em2及び第2固定電極Ef2は、第2容量素子C2を構成している。本実施の形態では、第1変位電極Em1及び第2変位電極Em2は、同一の面積を有している。更に、第1固定電極Ef1及び第2固定電極Ef2は、同一の面積を有している。また、第1変位電極Em1及び第1固定電極Ef1の実効対向面積及び電極間の距離は、第2変位電極Em2及び第2固定電極Ef2の実効対向面積及び電極間の距離と等しい。各電極Em1、Ef1、Em2、Ef2は、いずれも、YZ平面と平行であるように配置されている。
FIG. 3 is a schematic top view showing a capacitance
更に、図3に示すように、力覚センサ1cは、第1変形体31及び第2変形体32に生じる弾性変形に基づいて、可動部20に作用したY軸方向の力を示す電気信号を出力する検出回路40を有している。この検出回路40は、各容量素子C1、C2の静電容量値の変動量に基づいて、可動部20に作用した力を示す電気信号を出力するようになっている。なお、各容量素子C1、C2と検出回路40とを電気的に接続する配線は、図示が省略されている。
Further, as shown in FIG. 3, the
次に力覚センサ1cの作用について説明する。
Next, the operation of the
ここでは、Y軸負方向(図3における下方向)の力が可動部20に作用した場合を例に説明を行う。Y軸負方向の力が可動部20に作用すると、当該可動部20は、固定部10に対してY軸負方向に相対移動する。これにより、円弧状の第1弾性体31e及び第2弾性体32eは、圧縮力の作用によって、弾性変形する。この弾性変形は、第1弾性体31e及び第2弾性体32eの曲率半径が共に減少するような変形である。これにより、第1検出部位A及び第2検出部位Bが共にX軸負方向に変位する。このため、第1容量素子C1及び第2容量素子C2は、極板間距離が減少することにより、静電容量値が共に増大する。本実施の形態では、前述したように、第2弾性体32eのバネ定数の方が第1弾性体31eのバネ定数よりも小さいため、第2検出部位BのX軸負方向への変位の方が第1検出部位AのX軸負方向への変位よりも大きい。このため、第2容量素子C2は、第1容量素子C1よりも静電容量値が大きく変動する。すなわち、第2容量素子C2は、第1容量素子C1よりも高感度である。
Here, a case where a force in the negative Y-axis direction (downward in FIG. 3) acts on the
そして、検出回路40は、第1容量素子C1及び第2容量素子C2の一方の静電容量値の変動量に基づいて、可動部20に作用した力を計測する。静電容量タイプの力覚センサ1cにおいては、相対的に高感度である第2容量素子C2の静電容量値の変動量に基づいて作用した力を計測することにより、S/Nに優れた計測が可能となる。もちろん、第1容量素子C1の静電容量値の変動量に基づいて、可動部20に作用した力を計測することも可能であるし、例えば、第1容量素子C1の静電容量値の変動量に基づいて計測された力と、第2容量素子C2の静電容量値の変動量に基づいて計測された力と、の平均値を、作用した力として扱うことも可能である。
And the
なお、以上の説明においては、Y軸負方向の力が可動部20に作用した場合を例に説明を行ったが、これとは逆にY軸正方向(図3における上方向)の力が可動部20に作用しても当該力の計測が可能である。この場合、第1弾性体31e及び第2弾性体32eは、それらの曲率半径が共に増大するように、弾性変形する。これにより、第1検出部位A及び第2検出部位Bは、共にX軸正方向(図3における左方向)に変位し、第1容量素子C1及び第2容量素子C2の静電容量値は、共に減少する。なお、この場合も、第2容量素子C2は、第1容量素子C1よりも静電容量値が大きく変動する。
In the above description, the case where a force in the negative Y-axis direction acts on the
< 1−3. 歪ゲージタイプの力覚センサ >
あるいは、以上のような基本構造1は、歪ゲージタイプの力覚センサ1sに用いることもできる。
<1-3. Strain gauge type force sensor>
Alternatively, the
図4は、図1の基本構造1による歪ゲージタイプの力覚センサ1sを示す概略上面図である。図4に示すように、力覚センサ1sは、第1検出部位Aに配置された第1歪ゲージR1と、第2検出部位Bに配置された第2歪ゲージR2と、を有している。第1歪ゲージR1と第2歪ゲージR2とは、同一の特性を有している。その他の構成は、容量素子を有していない点を除き図3に示す力覚センサ1cと同様であるため、その詳細な説明は省略する。
FIG. 4 is a schematic top view showing a strain gauge
なお、歪ゲージR1、R2としては、例えば金属箔歪ゲージや半導体歪ゲージが採用され得る。金属箔歪ゲージは、圧縮応力が作用すると抵抗値が減少し、逆に引張応力が作用すると抵抗値が増大するという性質を有している。また、半導体歪ゲージは、ピエゾ抵抗効果を利用した歪ゲージであり、この半導体歪ゲージに対して引張応力が作用すると、p型の半導体歪ゲージにおいては抵抗値が増大し、n型の半導体歪ゲージにおいては抵抗値が減少するという特性がある。一方、この半導体歪ゲージに対して圧縮応力が作用すると、p型の半導体歪ゲージにおいては抵抗値が減少し、n型の半導体歪ゲージにおいては抵抗値が増大する。ここでは、第1歪ゲージR1及び第2歪ゲージR2として、金属箔歪ゲージが採用されているものとする。 As the strain gauges R1 and R2, for example, a metal foil strain gauge or a semiconductor strain gauge can be adopted. Metal foil strain gauges have the property that the resistance value decreases when compressive stress acts, and conversely the resistance value increases when tensile stress acts. The semiconductor strain gauge is a strain gauge using the piezoresistive effect. When a tensile stress acts on the semiconductor strain gauge, the resistance value increases in the p-type semiconductor strain gauge, and the n-type semiconductor strain gauge. The gauge has a characteristic that the resistance value decreases. On the other hand, when compressive stress acts on the semiconductor strain gauge, the resistance value decreases in the p-type semiconductor strain gauge, and the resistance value increases in the n-type semiconductor strain gauge. Here, it is assumed that metal foil strain gauges are employed as the first strain gauge R1 and the second strain gauge R2.
次に力覚センサ1sの作用について説明する。
Next, the operation of the
Y軸負方向の力が可動部20に作用すると、当該可動部20が固定部10に対してY軸負方向に相対移動し、前述の通り、第1弾性体31e及び第2弾性体32eは、その曲率半径が共に減少するように弾性変形する。これにより、円弧状の第1弾性体31e及び第2弾性体32eのX軸負側の表面には、各検出部位A、Bを含む領域に引張応力が生じる。前述したように、第1弾性体31eのバネ定数が第2弾性体32eのバネ定数よりも大きいため、第1検出部位Aに生じる引張応力は、第2検出部位Bに生じる引張応力よりも大きい。このことは、図2を参照して前述したとおりである。このため、第1歪ゲージR1の方が第2歪ゲージR2よりも電気抵抗値が大きく変動(増大)する。
When a force in the negative Y-axis direction acts on the
そして、検出回路40は、第1歪ゲージR1及び第2歪ゲージR2の一方の電気抵抗値の変動量に基づいて、作用した力を計測する。歪ゲージタイプの力覚センサ1sにおいては、相対的に高感度である第1歪ゲージR1の電気抵抗値の変動量に基づいて作用した力を計測することにより、S/Nに優れた計測が可能となる。もちろん、第2歪ゲージR2の電気抵抗値の変動量に基づいて作用した力を計測することも可能であるし、例えば、第1歪ゲージR1の電気抵抗値の変動量に基づいて計測された力と、第2歪ゲージR2の電気抵抗値の変動量に基づいて計測された力と、の平均値を、作用した力として扱うことも可能である。
And the
なお、以上の説明においては、Y軸負方向の力が可動部20に作用した場合を例に説明を行ったが、これとは逆にY軸正方向(図4における上方向)の力が可動部20に作用しても当該力の計測が可能である。この場合、前述の通り、第1弾性体31e及び第2弾性体32eは、その曲率半径が共に増大するように弾性変形する。これにより、円弧状の第1弾性体31e及び第2弾性体32eのX軸負側の表面には、各検出部位A、Bを含む領域に圧縮応力が生じ、各歪ゲージR1、R2の電気抵抗値が共に減少する。なお、この場合も、第1歪ゲージR1は、第2歪ゲージR2よりも電気抵抗値が大きく変動する。
In the above description, the case where a force in the negative Y-axis direction is applied to the
以上のような本実施の形態による力覚センサ1c、1sによれば、バネ定数が相対的に小さい第2検出部位B、すなわち弾性変形が相対的に大きい第2検出部位Bに第2容量素子C2を配置することにより、高精度且つ高感度で力の検出が可能な静電容量タイプの力覚センサ1cを提供することができる。あるいは、バネ定数が相対的に大きい第1検出部位A、すなわち弾性変形に伴って発現する応力が相対的に大きい第1検出部位Aに第1歪ゲージR1を配置することにより、高精度且つ高感度で力の検出が可能な力覚センサ1sを提供することができる。以上から、本実施の形態によれば、共通の基本構造1を有しながら静電容量タイプとして構成しても、歪ゲージタイプとして構成しても、高精度且つ高感度で作用した力の検出が可能な力覚センサ1c、1sを提供することができる。
According to the
< 1−4. 波形の検出部位を有する基本構造 >
次に、図5は、図1の基本構造1の変形例を示す概略上面図である。また、図6は、図5の基本構造1wにY軸方向の力が作用している状態を示す概略上面図である。図6(a)は、基本構造1wにY軸方向に沿った圧縮力f1が作用している状態であり、図6(b)は、基本構造1wにY軸方向に沿った引張力f2が作用している状態である。
<1-4. Basic structure with waveform detection section>
Next, FIG. 5 is a schematic top view showing a modification of the
図5に示すように、本変形例では、図1の2つの円弧状の弾性体に代えて、2つの波形の弾性構造体が採用されている。ここでは、これらの波形の弾性構造体を第1検出部位A及び第2検出部位Bと呼ぶことにする。図示されるように、第1検出部位Aは、第1変位部61dと、第1変位部61dの両側に設けられ、Y軸方向に間隔を空けて配置された接続部61m、61fを介して固定部10及び可動部20にそれぞれ接続された一対の第1変形部61e1、61e2と、を有し、第2検出部位Bは、第2変位部62dと、第2変位部62dの両側に設けられ、Y軸方向に間隔を空けて配置された接続部62m、62fを介して固定部10及び可動部20にそれぞれ接続された一対の第2変形部62e1、62e2と、を有している。図5に示すように、一対の第2変形部62e1、62e2は、一対の第1変形部61e1、61e2よりもY軸方向により立ち上がった状態で構成されている。
As shown in FIG. 5, in this modification, two corrugated elastic structures are employed instead of the two arc-shaped elastic bodies of FIG. Here, the elastic structures having these waveforms are referred to as a first detection site A and a second detection site B. As shown in the drawing, the first detection site A is provided on the
ここに示す例の場合、一対の第1変形部61e1、61e2及び一対の第2変形部62e1、62e2は、可撓性を有する板状片によって構成され、第1変位部61d及び第2変位部62dは、第3の板状片によって構成されている。各板状片は、各接続部61f、61m、62f、62mと同一の材料から構成されているが、図5及び図6に示すように、相対的に肉厚の薄い板状の部材であるため、可撓性を有することになる。
In the case of the example shown here, the pair of first deforming portions 61e1 and 61e2 and the pair of second deforming portions 62e1 and 62e2 are configured by flexible plate-like pieces, and the
なお、ここに示す例の場合、第1変位部61d及び第2変位部62dも肉厚の薄い板状の部材であるため可撓性を有しているが、基本構造1wを静電容量タイプの力覚センサとして利用する場合には、当該第1変位部61d及び第2変位部62dは、必ずしも可撓性をもった部材である必要はない。一方、基本構造1wを歪ゲージタイプの力覚センサとして利用する場合には、第1変位部61d及び第2変位部62dが可撓性をもった部材である必要がある。図5及び図6に示す例では、第1変位部61d及び第2変位部62d(第3の板状片)は、左右両面がYZ平面に平行な面となっている。
In the case of the example shown here, the
次に、図6(a)及び図6(b)を参照して、基本構造1wの可動部20に対して、Y軸方向に沿った力が作用した時の、各検出部位A、Bの作用について説明する。図6(a)及び図6(b)において、黒塗りの太い矢印は、作用する力の方向を示しており、白抜きの太い矢印は、各変位部61d、62dの変位の方向を示している。
Next, with reference to FIG. 6A and FIG. 6B, each of the detection sites A and B when a force along the Y-axis direction acts on the
図6(a)に示すように、基本構造1wの可動部20に対して、Y軸方向に沿った圧縮力f1が作用すると、各検出部位A、Bには、Y軸方向に沿った圧縮力が作用する。このため、一対の第1変形部61e1、61e2及び一対の第2変形部62e1、62e2の姿勢は、より水平に寝た状態に変化する。その結果、各変位部61d、62dは、図に白抜きの矢印で示す通り、X軸負方向(図6(a)における右方向)に変位する。一方、図6(b)に示すように、基本構造1wの可動部20に対して、Y軸正方向の引張力f2が作用すると、各検出部位A、Bには、Y軸方向に沿った引張力が作用する。このため、一対の第1変形部61e1、61e2及び一対の第2変形部62e1、62e2の姿勢は、より垂直に立った状態に変化する。その結果、各変位部61d、62dは、図に白抜きの矢印で示す通り、X軸正方向(図6(b)における左方向)に変位する。
As shown in FIG. 6A, when the compressive force f1 along the Y-axis direction acts on the
前述したように、一対の第1変形部61e1、61e2は、初期状態(図5参照)において、一対の第2変形部62e1、62e2よりもY軸方向により立ち上がった状態で構成されている。このため、図6(a)及び図6(b)に示すように、力の作用によって生じる変位は、第1変位部61dよりも第2変位部62dの方が、相対的に大きい。換言すれば、第1検出部位Aのバネ定数よりも第2検出部位Bのバネ定数の方が相対的に小さい。ここで、第1検出部位A及び第2検出部位Bのバネ定数とは、可動部20に作用した力を変位部61d、62dに生じたX軸方向の変位で除した値を意味している。
As described above, the pair of first deformable portions 61e1 and 61e2 are configured to rise in the Y-axis direction from the pair of second deformable portions 62e1 and 62e2 in the initial state (see FIG. 5). For this reason, as shown in FIGS. 6A and 6B, the displacement caused by the action of the force is relatively larger in the
基本構造1wを用いた力覚センサにおいては、このような変位を利用して、作用した力の向きおよび大きさが検出されるようになっている。すなわち、作用した力の向きは、各変位部61d、62dの変位方向によって検出され、作用した力の大きさは、その変位の大きさによって検出されるようになっている。
In the force sensor using the
以上のような本実施の形態による力覚センサによれば、バネ定数が相対的に小さい第2検出部位B、すなわち相対的に大きい弾性変形が生じる第2検出部位Bに容量素子C2を配置することにより、高精度且つ高感度で力の検出が可能な力覚センサ1cを提供することができる。
According to the force sensor according to the present embodiment as described above, the capacitive element C2 is arranged in the second detection portion B having a relatively small spring constant, that is, the second detection portion B in which relatively large elastic deformation occurs. Thereby, the
あるいは、以上のような基本構造1wを歪ゲージ式の力覚センサに用いることも可能である。歪ゲージ式の力覚センサを構成するには、静電容量タイプの力覚センサの各変位部61d、62dに配置された容量素子に代えて、具体的には変位電極に代えて、歪ゲージR1、R2を配置すればよい。
Alternatively, the
図7は、このようにして構成された歪ゲージタイプの力覚センサの第1検出部位Aの部分的な概略上面図を示している。図7(a)は、第1検出部位Aの初期状態を示す概略図であり、図7(b)は、基本構造1wに圧縮力が作用した時の第1検出部位Aを示す概略図であり、図7(c)は、基本構造1wに引張力が作用した時の第1検出部位Aを示す概略図である。各図において、黒塗りの太い矢印は、作用する力の方向を示しており、細い矢印は、各変位部61d、62dのX軸負側の表面に生じる応力(「→ ←」は圧縮応力、「← →」は引張応力)を示している。
FIG. 7 is a partial schematic top view of the first detection portion A of the strain gauge type force sensor configured as described above. FIG. 7A is a schematic diagram illustrating an initial state of the first detection site A, and FIG. 7B is a schematic diagram illustrating the first detection site A when a compressive force is applied to the
図7(a)に示すように、初期状態における第1検出部位Aの第1変位部61dは、ZY平面と平行である。そして、図7(b)に示すように、基本構造1wに圧縮力が作用すると、前述したように、一対の第1変形部61e1、61e2の姿勢は、より水平に寝た状態に変化する。このことによって、図7(b)に示すように、第1検出部位Aの第1変位部61dは、X軸負方向(図7(b)における右方向)に凸となるように撓み変形する。すなわち、図示されるように、第1歪ゲージR1が配置されている第1変位部61dのX軸負側の面には、Y軸方向に沿って、引張応力が生じる。一方、図7(c)に示すように、基本構造1wに引張力が作用すると、前述したように、一対の第1変形部61e1、61e2の姿勢は、より垂直に立った状態に変化する。このことによって、図7(c)に示すように、第1検出部位Aの第1変位部61dは、X軸正方向(図7(c)における左方向)に凸となるように撓み変形する。すなわち、図示されるように、第1歪ゲージR1が配置されている第1変位部61dのX軸負側の面には、Y軸方向に沿って、圧縮応力が生じる。結局、第1検出部位A1に作用する力の向き(圧縮か引張か)と第1変位部61dのX軸負側の面に生じる応力の向き(圧縮か引張か)とは、互いに逆になる。なお、図7(b)及び図7(c)の撓み変形の態様から理解されるように、第1変位部61dのX軸正側の面に生じる応力の向き(圧縮か引張か)は、第1検出部位A1に作用する力の向き(圧縮か引張か)と同じになる。
As shown in FIG. 7A, the
図7には、第2検出部位Bが示されていないが、当該第2検出部位Bにおいても、第2変位部62dに同様の撓み変形が生じる。但し、前述したように、第1検出部位Aよりも第2検出部位の方が相対的に小さいバネ定数を有することから、第1変位部61dに生じる応力の方が、第2変位部62dに生じる応力よりも、大きい。このことから、第1変位部61dに配置された第1歪ゲージを用いて作用した力Fyを検出することにより、高精度且つ高感度で力の検出が可能な力覚センサ1sを提供することができる。
Although the second detection site B is not shown in FIG. 7, the same bending deformation occurs in the
以上から、本実施の形態によれば、静電容量タイプとして構成しても、歪ゲージタイプとして構成しても、高精度且つ高感度で力の検出が可能な力覚センサ1c、1sを提供することができる。
As described above, according to the present embodiment, there are provided
また、第1検出部位A及び第2検出部位Bは、可動部20と固定部10との間に並列に配置されているため、第1検出部位A及び第2検出部位Bに大きな変形ないし変位を生じさせることができ、作用した力をより高精度且つ高感度で検出することができる。
Further, since the first detection part A and the second detection part B are arranged in parallel between the
更に、図1に示す基本構造1の第1検出部位Aは、所定の半径を有する円弧の一部に沿った形状を有し、第2検出部位Bは、前記所定の半径とは異なる半径を有する円弧の一部に沿った形状を有していている。このため、第1検出部位A及び第2検出部位Bに、作用した力と直交する方向に変位を生じさせることができるため、力の計測が容易である。こことは、図5に示す基本構造1wにおいても、同様である。
Further, the first detection site A of the
<<< §2. 本発明の第2の実施の形態による力覚センサ >>>
次に、本発明の第2の実施の形態による力覚センサについて詳細に説明する。
<<< §2. Force sensor according to the second embodiment of the present invention >>
Next, a force sensor according to a second embodiment of the present invention will be described in detail.
< 2−1. 基本構造 >
図8は、本発明の第2の実施の形態による力覚センサの基本構造101を示す概略上面図であり、図9は、受力体としての可動部120にZ軸周りのモーメントが作用した時の図8の基本構造101を示す概略上面図であり、図10は、図8の基本構造101の第2象限部分を示す概略上面図である。
<2-1. Basic structure>
FIG. 8 is a schematic top view showing the
本実施の形態による力覚センサは、XYZ三次元座標系における各軸方向の力及び各軸まわりのモーメントの少なくとも1つを検出するためのものである。図8乃至図10に示すように、基本構造101は、XYZ三次元座標系に対して固定された固定部110と、力ないしモーメントの作用により固定部110に対して相対移動する可動部120と、固定部110と可動部120とに接続され、可動部120が固定部110に対して相対移動することにより弾性変形を生じる変形体140と、を有している。
The force sensor according to the present embodiment is for detecting at least one of a force in each axial direction and a moment around each axis in an XYZ three-dimensional coordinate system. As shown in FIGS. 8 to 10, the
図8乃至図10に示すように、固定部110は、XY平面上に固定され、Z軸正方向から見て、原点を中心とする円盤の形状を有している。可動部120は、Z軸正方向から見て、XY平面上に固定部110と同心に配置された円環の形状を有している。なお、固定部110も円環の形状を有していても良い。
As shown in FIGS. 8 to 10, the fixing
また、図8乃至図10に示すように、変形体140は、弾性体から構成された円環の形状の第1変形体141と、当該第1変形体141を取り囲むように配置され、弾性体から構成された円環の形状の第2変形体142と、を有している。Z軸正方向から見て、第1変形体141は、固定部110を取り囲むように当該固定部110と同心に配置され、第2変形体142は、第1変形体141と可動部120との間にそれらと同心に配置されている。結局、固定部110、第1変形体141、第2変形体142及び可動部120は、Z軸正方向から見て、互いに同心に、且つ、径方向外側に向かってこの順序で、配置されている。
Also, as shown in FIGS. 8 to 10, the
また、本実施の形態による基本構造101の第1変形体141及び第2変形体142は、同一の断面形状を有している。このため、各変形体141、142の直径の相違から、第1変形体141の各検出部位A1〜A4のバネ定数は、第2変形体の各検出部位B1〜B4のバネ定数より大きい。ここで、各検出部位A1〜A4、B1〜B4のバネ定数とは、可動部20に作用した力を各検出部位1〜A4、B1〜B4に生じたV軸方向及びW軸方向の変位で除した値を意味している。
Moreover, the
図8乃至図10に示すように、固定部110と第1変形体141とは、互いの隙間において正のY軸上に配置された連結体133と負のY軸上に配置された連結体137とによって、互いに連結されている。更に、第1変形体141と第2変形体142とは、互いの隙間において正のY軸上に配置された連結体134と負のY軸上に配置された連結体138とによって、互いに連結されている。これらのことにより、第1変形体141及び第2変形体142は、Y軸上に位置する各2つの部位が固定部110に対して相対移動しないようになっている。
As shown in FIGS. 8 to 10, the fixing
更に、図8乃至図10に示すように、第1変形体141と第2変形体142とは、互いの隙間において正のX軸上に配置された連結体131と負のX軸上に配置された連結体135とによって、互いに連結されている。更に、可動部120と第2変形体142とは、互いの隙間において正のX軸上に配置された連結体132と負のX軸上に配置された連結体136とによって、互いに連結されている。これらのことにより、第1変形体141及び第2変形体142は、X軸上に位置する各2つの部位が可動部120と一体的に固定部110に対して相対移動するようになっている。
Further, as shown in FIGS. 8 to 10, the first
次に、このような基本構造101の可動部120にZ軸周りのモーメント−Mzが作用した時の、当該基本構造101の作用について図9を参照して説明する。図9において、黒塗りの太い矢印は、作用する力の方向を示しており、白抜きの太い矢印は、各検出部位A1〜A4、B1〜B4の変位の方向を示している。
Next, the action of the
図9に示すように、モーメント−Mzの作用によって可動部120が固定部110に対してZ軸正方向から見て右回りに相対回転されると、第1及び第2変形体141、142のうち、連結体131、132によって連結されている正のX軸上の部位がY軸負方向(図9における下方)へ、連結体135、136によって連結されている負のX軸上の部位がY軸正方向(図9における上方)へ、それぞれ移動する。一方、第1及び第2変形体141、142のうち、連結体133、134、137、138で連結されているY軸上の部位は、移動しない。これらのことによって、各変形体141、142に次のような弾性変形が生じる。すなわち、XY平面上に、原点Oを通りX軸およびY軸に対して45°をなすV軸およびW軸を定義した場合に、各変形体141、142のうち、W軸上に位置する部位においては、径方向外方への変位が生じ、V軸上に位置する部位においては、径方向内方への変位が生じる。一方、図示されていないが、可動部120に反対方向の力が作用して当該可動部120が固定部110に対して左回りに相対回転されると、W軸上に位置する部位においては、径方向内方への変位が生じ、V軸上に位置する部位においては、径方向外方への変位が生じる。
As shown in FIG. 9, when the
これらの変位は、W軸上及びV軸上で最大となることから、正のZ軸方向から見て、各変形体141、142のうちW軸及びV軸と交わる部位の変位ないし応力に着目して作用した力ないしモーメントを計測することが効率的である。このため、ここでは、図9に示すように、第1変形体141のうちW軸及びV軸と交わる4つの部位を第1象限から順に第1−1検出部位A1、第1−2検出部位A2、第1−3検出部位A3及び第1−4検出部位A4とし、第2変形体142のうちW軸及びV軸と交わる4つの部位を第1象限から順に第2−1検出部位B1、第2−2検出部位B2、第3−3検出部位B3及び第2−4検出部位B4とする。
Since these displacements are maximum on the W-axis and the V-axis, pay attention to the displacements or stresses of the portions of the
ここで、本実施の形態による基本構造101と第1の実施の形態による基本構造1との関連性について、図10を参照して説明する。
Here, the relationship between the
前述したように、本実施の形態による基本構造101は、各変形体141、142のうち正のY軸上に位置する部位がXYZ三次元座標系に対して固定されており、各変形体141、142のうち負のX軸上に位置する部位が可動部120と共に固定部110に対して一体的に相対移動するようになっている。このような構造は、各変形体141、142の正のY軸上に位置する部位を第1の実施の形態による基本構造1の固定部10と捉え、各変形体141、142の負のX軸上に位置する部位を第1の実施の形態による基本構造1の可動部20と捉えることによって、図10に示す構造と第1の実施の形態による基本構造1とが実質的に同じ構造であると理解される。同様のことは、第1、第3及び第4象限においても成立する。更に、各変形体141、142のバネ定数の関係は、第1の実施の形態における基本構造1において、第1変形体31の第1検出部位Aのバネ定数が第2変形体32の第2検出部位Bのバネ定数より大きい、ということとも対応している。
As described above, in the
結局、図8及び図9に示す基本構造101は、第1の実施の形態による基本構造1を4つ組み合わせたものであると言える。すなわち、本実施の形態による基本構造101は、第1の実施の形態において説明したように、変位について見ると第1−1〜第1−4検出部位A1〜A4よりも第2−1〜第2−4検出部位B1〜B4の方が高感度であり、応力について見ると第2−1〜第2−4検出部位B1〜B4よりも第1−1〜第1−4検出部位A1〜A4の方が高感度である、という特性を有している。
After all, it can be said that the
< 2−2. 静電容量タイプの力覚センサ >
次に、以上のような基本構造101を用いた、静電容量タイプの力覚センサ101cについて説明する。
<2-2. Capacitance type force sensor>
Next, a capacitance
図11は、図8の基本構造101による静電容量タイプの力覚センサ101cを示す概略上図である。図11に示すように、力覚センサ101cは、第1−1〜第1−4検出部位A1〜A4の外面に配置された第1−1〜第1−4変位電極Em11〜Em14と、各変位電極Em11〜Em14に対向して配置され、固定部110に対して相対移動しない第1−1〜第1−4固定電極Ef11〜Ef14と、第2−1〜第2−4検出部位B1〜B4の外面に配置された第2−1〜第2−4変位電極Em21〜Em24と、各変位電極Em21〜Em24に対向して配置され、固定部110に対して相対移動しない第2−1〜第2−4固定電極Ef21〜Ef24と、を有している。
FIG. 11 is a schematic top view showing an electrostatic force
図11に示すように、第1−1変位電極Em11及び第1−1固定電極Ef11は、第1−1容量素子C11を構成し、第1−2変位電極Em12及び第1−2固定電極Ef12は、第1−2容量素子C12を構成し、第1−3変位電極Em13及び第1−3固定電極Ef13は、第1−3容量素子C13を構成し、第1−4変位電極Em14及び第1−4固定電極Ef14は、第1−4容量素子C14を構成している。更に、第2−1変位電極Em21及び第2−1固定電極Ef21は、第2−1容量素子C21を構成し、第2−2変位電極Em22及び第2−2固定電極Ef22は、第2−2容量素子C22を構成し、第2−3変位電極Em23及び第2−3固定電極Ef23は、第2−3容量素子C23を構成し、第2−4変位電極Em24及び第2−4固定電極Ef24は、第2−4容量素子C24を構成している。各固定電極Ef11〜Ef24は、例えばXY平面に固定され正のZ軸方向に延びる支持体(不図示)によって、可動部120に力が作用しても第1及び第2変形体141、142と干渉しない位置に、支持されている。
As shown in FIG. 11, the 1-1 displacement electrode Em11 and the 1-1 fixed electrode Ef11 constitute a 1-1 capacitive element C11, and the 1-2 displacement electrode Em12 and the 1-2 fixed electrode Ef12. Constitutes the first-second capacitance element C12, the first-third displacement electrode Em13 and the first-third fixed electrode Ef13 constitute the first-third capacitance element C13, and the first-fourth displacement electrode Em14 and the first The 1-4 fixed electrode Ef14 constitutes a 1-4 capacitive element C14. Furthermore, the 2-1 displacement electrode Em21 and the 2-1 fixed electrode Ef21 constitute a 2-1 capacitive element C21, and the 2-2 displacement electrode Em22 and the 2-2 fixed electrode Ef22 are the second 2- The second-capacitance element C22 constitutes the second-third displacement electrode Em23 and the second-third fixed electrode Ef23, and the second-third capacitance element C23 constitutes the second-fourth displacement electrode Em24 and the second-fourth fixed electrode. Ef24 constitutes the second-fourth capacitive element C24. Each of the fixed electrodes Ef11 to Ef24 is fixed to the XY plane and extends in the positive Z-axis direction, for example, even if a force acts on the
本実施の形態では、第1−1〜第1−4変位電極Em11〜Em14及び第2−1〜第2−4変位電極Em21〜Em24は、全て同一の面積を有している。更に、第1−1〜第1−4固定電極Ef11〜Ef14及び第2−1〜第2−4固定電極Ef21〜Ef24は、全て同一の面積を有している。また、各容量素子C11〜C24を構成する各電極の実効対向面積及び対向する電極間の距離は、全て同一である。 In the present embodiment, the 1-1 to 1-4 displacement electrodes Em11 to Em14 and the 2-1 to 2-4 displacement electrodes Em21 to Em24 all have the same area. Furthermore, the 1-1 to 1-4 fixed electrodes Ef11 to Ef14 and the 2-1 to 2-4 fixed electrodes Ef21 to Ef24 all have the same area. Further, the effective opposing area of each electrode constituting each of the capacitive elements C11 to C24 and the distance between the opposing electrodes are all the same.
更に、図11に示すように、力覚センサ101cは、第1変形体141及び第2変形体142に生じる弾性変形に基づいて、可動部120に作用した力ないしモーメントを示す電気信号を出力する検出回路150を有している。図11に示す力覚センサ101cの検出回路150は、各容量素子C11〜C24の静電容量値の変動量に基づいて、可動部120に作用した力ないしモーメントを示す電気信号を出力するようになっている。なお、各容量素子C11〜C24と検出回路150とを電気的に接続する配線は、図示が省略されている。
Further, as shown in FIG. 11, the
次に力覚センサ101cの作用について説明する。
Next, the operation of the
ここでは、Z軸正方向から見て右回りの力(モーメント)が可動部120に作用した場合を例に説明を行う(図9参照)。この場合、前述したように、各変形体141、142のうち、W軸上に位置する第1−2、第2−2、第1−4、第2−4検出部位A2、B2、A4、B4においては、径方向外方への変位が生じ、V軸上に位置する第1−1、第2−1、第1−3、第2−3検出部位A1、B1、A3、B3においては、径方向内方への変位が生じる。これにより、第1−2、第2−2、第1−4、第2−4容量素子C12、C22、C14、C24は、それぞれの電極間距離が減少するため静電容量値が増大する。これに対し、第1−1、第2−1、第1−3、第2−3容量素子C11、C21、C13、C23は、それぞれの電極間距離が増大するため静電容量値が減少する。
Here, the case where a clockwise force (moment) as viewed from the positive direction of the Z-axis acts on the
本実施の形態では、前述したように、第2変形体142の各検出部位B1〜B4のバネ定数が第1変形体141の各検出部位A1〜A4のバネ定数よりも小さいため、各静電容量値の変動量の絶対値に着目すると、第2変形体142上に配置された第2−1〜第2−4容量素子C21〜C24の静電容量値の変動量は、第1変形体141上に配置された第1−1〜第1−4容量素子C11〜C14の静電容量値の変動量よりも大きい。
In the present embodiment, as described above, the spring constants of the detection parts B1 to B4 of the second
そして、検出回路150は、以下の[式1]を用いて、作用したZ軸まわりのモーメントMzを計測する。[式1]においてMz1は、第1変形体141の弾性変形に基づいて計測されたZ軸まわりのモーメントであり、Mz2は、第2変形体142の弾性変形に基づいて計測されたZ軸まわりのモーメントである。なお、以下の式において、C11〜C24は、第1−1〜第2−4容量素子C11〜C24の静電容量値の変動量を示している。このことは、本明細書における他の式においても、同様である。
[式1]
−Mz1=−C11+C12−C13+C14
−Mz2=−C21+C22−C23+C24
Then, the
[Formula 1]
-Mz1 = -C11 + C12-C13 + C14
-Mz2 = -C21 + C22-C23 + C24
静電容量タイプの力覚センサ101cにおいては、相対的に高感度である第2−1〜第2−4容量素子C21〜C24の静電容量値の変動量に基づいて、すなわち[式1]の−Mz2に基づいて、作用したモーメントを計測することにより、S/Nに優れた計測が可能となる。もちろん、第1−1〜第1−4容量素子C11〜C14の静電容量値の変動量に基づいて、作用したモーメントを計測しても良い。なお、Z軸周りのモーメントMzを計測するのみであれば、第1−1〜第1−4容量素子C11〜C14及び第2−1〜第2−4容量素子C21〜C24の一方のみが設けられていれば良い。
In the capacitance
< 2−3. 歪ゲージタイプの力覚センサ >
以上のような基本構造101は、歪ゲージタイプの力覚センサ101sに用いることもできる。
<2-3. Strain gauge type force sensor>
The
図12は、図8の基本構造101による歪ゲージタイプの力覚センサ101sを示す概略上面図である。図12に示すように、力覚センサ101sは、環状の第1変形体141の外面において、第1−1検出部位A1に配置された第1−1歪ゲージR11と、第1−2検出部位A2に配置された第1−2歪ゲージR12と、第1−3検出部位A3に配置された第1−3歪ゲージR13と、第1−4検出部位A4に配置された第1−4歪ゲージR14と、を有している。更に、力覚センサ101sは、環状の第2変形体142の外面において、第2−1検出部位B1に配置された第2−1歪ゲージR21と、第2−2検出部位B2に配置された第2−2歪ゲージR22と、第2−3検出部位B3に配置された第2−3歪ゲージR23と、第2−4検出部位B4に配置された第2−4歪ゲージR24と、を有している。各歪ゲージR11〜R24は、金属箔歪ゲージであり、全て同一の特性を有している。その他の構成は、容量素子を有していない点を除き図11に示す力覚センサ1cと同様であるため、その詳細な説明は省略する。
FIG. 12 is a schematic top view showing a strain gauge
次に力覚センサ101sの作用について説明する。
Next, the operation of the
ここでも、Z軸正方向から見て右回りの力(モーメント)が可動部120に作用した場合を例に説明を行う(図9参照)。この場合、前述したように、各変形体141、142のうち、W軸上に位置する第1−2、第2−2、第1−4、第2−4検出部位A2、B2、A4、B4においては、径方向外方への変位が生じ、V軸上に位置する第1−1、第2−1、第1−3、第2−3検出部位A1、B1、A3、B3においては、径方向内方への変位が生じる。これにより、W軸上に位置する第1−2、第2−2、第1−4、第2−4検出部位A2、B2、A4、B4には、引張応力が生じ、V軸上に位置する第1−1、第2−1、第1−3、第2−3検出部位A1、B1、A3、B3には、圧縮応力が生じる。前述したように、第1変形体141の各検出部位A1〜A4のバネ定数の方が第2変形体142の各検出部位B11〜B14のバネ定数よりも大きいため、第1変形体141の各検出部位A1〜A4に生じる応力の絶対値は、第2変形体142の各検出部位B1〜B4に生じる応力の絶対値よりも大きい。このため、第1−1〜第1−4歪ゲージR11〜R14の電気抵抗値は、第2−1〜第2−4歪ゲージR21〜R24の電気抵抗値よりも大きく変動する。
Here, the case where a clockwise force (moment) as viewed from the positive direction of the Z-axis acts on the
そして、検出回路150は、以下の[式2]を用い、例えば、第1−1〜第1−4歪ゲージR11〜R14及び第2−1〜第2−4歪ゲージR21〜R24の少なくとも一方の電気抵抗値の変動量に基づいて、作用したZ軸まわりのモーメントMzを計測する。[式2]においてMz1は、第1変形体141の弾性変形に基づいて計測されたZ軸まわりのモーメントであり、Mz2は、第2変形体142の弾性変形に基づいて計測されたZ軸まわりのモーメントである。また、以下の式において、R11〜R24は、第1−1〜第2−4歪ゲージR11〜R24の電気抵抗値の変動量を示している。このことは、本明細書における他の式においても、同様である。
[式2]
−Mz1=−R11+R12−R13+R14
−Mz2=−R21+R22−R23+R24
And the
[Formula 2]
-Mz1 = -R11 + R12-R13 + R14
-Mz2 = -R21 + R22-R23 + R24
歪ゲージタイプの力覚センサ101cにおいては、相対的に高感度である第1−1〜第1−4歪ゲージR11〜R14の電気抵抗値の変動量に基づいて、すなわち[式2]の−Mz1に基づいて、作用したモーメントを計測することにより、S/Nに優れた計測が可能となる。もちろん、第2−1〜第2−4歪ゲージR21〜R24の電気抵抗値の変動量に基づいて作用したモーメントを計測しても良い。また、計測に当たり、第1−1〜第1−4歪ゲージR11〜R14または第2−1〜第2−4歪ゲージR21〜R24によりホイートストンブリッジ回路(不図示)を構成することによって、作用したモーメントを計測することも可能である。なお、Z軸周りのモーメントMzを計測するのみであれば、第1−1〜第1−4歪ゲージR11〜R14及び第2−1〜第2−4歪ゲージR21〜R24の一方のみが設けられていれば良い。
In the strain gauge
以上のような本実施の形態による力覚センサによれば、バネ定数が相対的に小さい、すなわち生じる弾性変形が相対的に大きい、第2−1〜第2−4検出部位B1〜B4に容量素子C21〜C24を配置することにより、高精度且つ高感度なモーメントの検出が可能な力覚センサ101cを提供することができる。更に、バネ定数が相対的に大きい、すなわち弾性変形に伴って発現する応力が相対的に大きい、第1−1〜第1−4検出部位A1〜A4に歪ゲージR11〜R14を配置することにより、高精度且つ高感度でモーメントの検出が可能な力覚センサ101sを提供することができる。以上から、本実施の形態によれば、静電容量タイプとして構成しても、歪ゲージタイプとして構成しても、高精度且つ高感度で力の検出が可能な力覚センサ101c、101sを提供することができる。
According to the force sensor according to the present embodiment as described above, the spring constant is relatively small, that is, the generated elastic deformation is relatively large, and the capacities are provided in the first to second to fourth detection portions B1 to B4. By arranging the elements C21 to C24, it is possible to provide the
以上の力覚センサ101c、101sは、第1変形体141及び第2変形体142が共に円環状であり、互いに同心である。このため、簡易な構成で当該力覚センサ101c、101sを構成することができる。
In the
更に、第1変形体141は、Z軸方向から見てV軸及びW軸に重なる4つの部位に第1−1〜第1−4検出部位A1〜A4を有し、第2変形体142は、Z軸方向から見てV軸及びW軸に重なる4つの部位に第2−1〜第2−4検出部位B1〜B4を有している。このため、作用したモーメントによって第1変形体141及び第2変形体142に対称的な弾性変形が生じるため、作用したモーメント以外の力の影響を受けることが無い。
Further, the first
< 2−4. 基本構造の変形例 >
次に、以上の基本構造101の変形例について説明する。図13は、図8の基本構造101の第1の変形例を示す概略上面図であり、図14は、図8の基本構造101の第2の変形例を示す概略上面図であり、図15は、図8の基本構造101の第3の変形例を示す概略上面図である。
<2-4. Modification of basic structure>
Next, a modified example of the
まず、図13に示す変形例による基本構造101aについて説明する。この基本構造101aは、環状の第2変形体142に、肉厚が薄い薄肉部が設けられている点で、上述した基本構造101とは異なっている。具体的には、第2変形体142は、V軸上及びW軸上に位置する部位を含む領域に第2−1〜第2−4薄肉部142t1〜142t4を有している。このため、第2−1〜第2−4検出部位B1〜B4は、第2−1〜第2−4薄肉部142t1〜142t4にそれぞれ設けられている。一方、第1変形体141は、図8乃至図10に示す基本構造101の第1変形体141と同じである。
First, the
本変形例では、図13に示すように、各薄肉部142t1〜142t4は、第2変形体142の径方向の肉厚を薄く構成することによって、形成されている。もちろん、他の変形例においては、第2変形体142のZ軸方向の肉厚を薄く構成することによって、形成されても良い。その他の構成は図8乃至図10に示す基本構造101と同じであるため、対応する構成には同様の符号を付し、その詳細な説明は省略する。
In the present modification, as shown in FIG. 13, the thin portions 142t1 to 142t4 are formed by reducing the radial thickness of the second
このような構成の基本構造101aに対して、例えばZ軸正方向から見て右回り(図9と同じ方向)のモーメントが作用すると、各変形体141、142には、図9と同様の弾性変形が生じる。ただし、第2変形体142の薄肉部142t1〜142t4に生じる弾性変形は、図9の場合よりも大きい。
For example, when a clockwise moment (same direction as in FIG. 9) acts on the
このような構成の基本構造101aによれば、各薄肉部142t1〜142t4の存在によって、第2−1〜第2−4検出部位B1〜B4のバネ定数が相対的に減少する。従って、基本構造101aを静電容量タイプの力覚センサとして利用した際には、先に述べた基本構造101と比較して、第2−1〜第2−4検出部位B1〜B4に設けられる容量素子において、とりわけ大きな静電容量値の変動量が観察される。すなわち、静電容量タイプの力覚センサにおいては、相対的に高感度である第2−1〜第2−4容量素子C21〜C24の静電容量値の変動量に基づいて作用した力ないしモーメントを計測することにより、より一層S/Nに優れた計測が可能となる。もちろん、第1−1〜第1−4容量素子C11〜C14の静電容量値の変動量に基づいて作用した力を計測しても良い。
According to the
このような薄肉部142t1〜142t4を有する変形体が設けられた基本構造の更なる変形例を、図14を参照して説明する。 A further modified example of the basic structure provided with the deformed body having such thin portions 142t1 to 142t4 will be described with reference to FIG.
図14に示す基本構造101bは、第2変形体142bがX軸及びY軸によって4つに分割されている点で、第1の変形例による基本構造101aと異なっている。すなわち、第2変形体142bは、XY平面の第1象限に配置された第2−1変形体142b1と、XY平面の第2象限に配置された第2−2変形体142b2と、XY平面の第3象限に配置された第2−3変形体142b3と、XY平面の第4象限に配置された第2−4変形体142b4と、を有している。図14に示すように、第2−1変形体142b1は、正のY軸近傍の部位がY軸と平行に延在する連結体134aによって第1変形体141に接続され、正のX軸近傍の部位がX軸と平行に延在する連結体132bによって可動部120に接続されている。更に、第2−2変形体142b2は、正のY軸近傍の部位がY軸と平行に延在する連結体134bによって第1変形体141に接続され、負のX軸近傍の部位がX軸と平行に延在する連結体136aによって可動部120に接続されている。第2−3変形体142b3は、負のX軸近傍の部位がX軸と平行に延在する連結体136bによって第1変形体141に接続され、負のY軸近傍の部位がY軸と平行に延在する連結体138aによって可動部120に接続されている。第2−4変形体142b4は、負のY軸近傍の部位がY軸と平行に延在する連結体138bによって第1変形体141に接続され、正のX軸近傍の部位がX軸と平行に延在する連結体132aによって可動部120に接続されている。
The
更に、図14に示すように、X軸と平行に延在する2つの連結体132a、132bは、互いにY軸方向に離間しており、当該2つの連結体132a、132bの間には、第1変形体141と可動部120とを接続する連結体131lがX軸に沿って延在している。同様に、X軸と平行に延在する延在する2つの連結体136a、136bは、互いにY軸方向に離間しており、当該2つの連結体136a、136bの間には、第1変形体141と可動部120とを接続する連結体135lがX軸に沿って延在している。その他の構成は図14に示す第1の変形例と同様であるため、同じ構成部分には同様の符号を付し、その詳細な説明は省略する。
Furthermore, as shown in FIG. 14, the two
このような構成の基本構造101bに対して、例えばZ軸正方向から見て右回り(図9と同じ方向)のモーメントが作用すると、各変形体141、142には、図9と同様の弾性変形が生じる。ただし、第2変形体142の薄肉部142t1〜142t4に生じる弾性変形は、図13に示す第1の変形例による基本構造101aと同じであり、図9の場合よりも大きい。
When, for example, a clockwise moment (same direction as in FIG. 9) acts on the
次に、薄肉部142t1〜142t4を有する変形体が設けられた基本構造の第3の変形例を、図15を参照して説明する。この第3の変形例による基本構造101b’は、第2−1〜第2−4変形体142b1〜142b4が可動部120と直接的には連結されていない点で、図14に示す第2の変形例による基本構造101bと異なっている。すなわち、図15に示すように、第3の変形例による基本構造101b’では、第2−1変形体142b1及び第2−4変形体142b4の正のX軸近傍の領域が連結体132d、132eによって第1変形体141にそれぞれ連結されており、第2−2変形体142b2及び第2−3変形体142b3の負のX軸近傍の領域が連結体136c、136dによって第1変形体141にそれぞれ連結されている。本変形例では、第2−1〜第2−4変形体142b1〜142b4はいずれも可動部120に連結されていないが、その代わりに、連結体131lと第1変形体141との連結部位の近傍にて連結体132d、132eの端部が当該第1変形体141に連結されており、更に、連結体135lと第1変形体141との連結部位の近傍にて連結体136c、136dの端部が当該第1変形体141に連結されている。このため、本変形例でも、実質的に図13及び図14に示す基本構造101a、101bと同様の作用が提供されることになる。
Next, a third modified example of the basic structure provided with the deformed body having the thin portions 142t1 to 142t4 will be described with reference to FIG. The
< 2−5. X軸方向の力Fx及びY軸方向の力Fyの検出原理 >
以上の説明においては、力覚センサ101c、101sによってZ軸周りのモーメントMzを計測する方法について説明したが、本力覚センサ101c、101sは、X軸方向の力Fx及びY軸方向の力Fyをも計測することができる。
<2-5. Principle of detection of force Fx in the X-axis direction and force Fy in the Y-axis direction>
In the above description, the method of measuring the moment Mz around the Z-axis by the
まず、図16を参照して、X軸正方向の力+Fxを計測するための原理について説明する。図16は、図8の基本構造101の可動部120にX軸正方向の力+Fxが作用した時に変形体140に生じる弾性変形を説明するための図である。第1変形体141及び第2変形体142に生じる弾性変形は、程度は異なるもののその傾向は同一であることから、図16においては、簡単のため、単一の変形体140のみを示している。また、簡単のため、固定部110、及び、固定部110と変形体140とを連結する連結体の図示を省略しているが、図16の点P1及び点P2は、原点Oに対して相対移動しない。変形体140のうち、Z軸正方向から見てV軸及びW軸と交わる部位の外面には、第1象限から反時計回りに、4つの検出部位A、B、C、Dがこの順序で設けられている。図16において、黒塗りの太い矢印は、作用する力の方向を示しており、白抜きの太い矢印は、各検出部位A〜Dの変位の方向を示している。
First, the principle for measuring the force + Fx in the X-axis positive direction will be described with reference to FIG. FIG. 16 is a diagram for explaining elastic deformation that occurs in the
図16に示すように、基本構造101の可動部120にX軸正方向の力+Fxが作用すると、変形体140のうち、X軸上の部位は、可動部120と共にX軸正方向へ移動し、その一方で、点P1、P2に対応するY軸上の部位は、移動しない。このことから、変形体140は、4つの検出部位A〜Dのうち、第1象限及び第4象限に位置する検出部位A、Dが変形体140の径方向内方へ変位し、その一方、第2象限及び第3象限に位置する検出部位B、Cが変形体140の径方向外方へ変位するように、弾性変形する。
As shown in FIG. 16, when a force + Fx in the X-axis positive direction acts on the
以上から、次のことが理解される。すなわち、図11に示す力覚センサ101cの可動部120にX軸正方向の力+Fxが作用すると、第1象限に配置された第1−1容量素子C11及び第2−1容量素子C21、並びに、第4象限に位置する第1−4容量素子C14及び第2−4容量素子C24は、固定電極と変位電極との離間距離が増大するため、静電容量値が減少する。その一方、第2象限に位置する第1−2容量素子C12及び第2−2容量素子C22、並びに、第3象限に位置する第1−3容量素子C13及び第2−3容量素子C23は、固定電極と変位電極との離間距離が減少するため、静電容量値が増大する。
From the above, the following can be understood. That is, when a force + Fx in the positive direction of the X-axis acts on the
したがって、検出回路150は、以下の[式3]を用いて、作用したX軸方向の力Fxを計測する。[式3]においてFx1は、第1変形体141の弾性変形に基づいて計測されたX軸方向の力であり、Fx2は、第2変形体142の弾性変形に基づいて計測されたX軸方向の力である。
[式3]
Fx1=−C11+C12+C13−C14
Fx2=−C21+C22+C23−C24
Therefore, the
[Formula 3]
Fx1 = −C11 + C12 + C13−C14
Fx2 = −C21 + C22 + C23−C24
次に、図17を参照して、Y軸正方向の力+Fyを計測するための原理について説明する。図17は、図8の基本構造101の可動部120にY軸正方向の力+Fyが作用した時に変形体140に生じる弾性変形を説明するための図である。第1変形体141及び第2変形体142に生じる弾性変形は、程度は異なるもののその傾向は同一であることから、図17においても、簡単のため、単一の変形体140のみを示している。また、簡単のため、固定部110、及び、固定部110と変形体140とを連結する連結体の図示を省略しているが、図17の点P1及び点P2は、原点Oに対して相対移動しない。また、変形体140のうち、Z軸正方向から見てV軸及びW軸と交わる部位には、4つの検出部位A、B、C、Dが第1象限から反時計回りにこの順序で設けられている。図17において、黒塗りの太い矢印は、作用する力の方向を示しており、白抜きの太い矢印は、各検出部位A〜Dの変位の方向を示している。
Next, the principle for measuring the force + Fy in the Y-axis positive direction will be described with reference to FIG. FIG. 17 is a diagram for explaining elastic deformation that occurs in the
図17に示すように、基本構造101の可動部120にY軸正方向の力+Fyが作用すると、変形体140のうち、X軸上の部位は、可動部120と共にY軸正方向へ移動し、その一方で、点P1、P2に対応するY軸上の部位は、移動しない。このことから、変形体140は、4つの検出部位A〜Dのうち、第1象限及び第2象限に位置する検出部位A、Bが変形体140の径方向外方へ移動し、その一方、第3象限及び第4象限に位置する検出部位C、Dが変形体140の径方向内方へ移動するように、弾性変形する。
As shown in FIG. 17, when a force + Fy in the Y-axis positive direction acts on the
以上から、次のことが理解される。すなわち、図11に示す力覚センサ101cの可動部120にY軸正方向の力+Fyが作用すると、第1象限に位置する第1−1容量素子C11及び第2−1容量素子C21、並びに、第2象限に位置する第1−2容量素子C12及び第2−2容量素子C22は、固定電極と変位電極との離間距離が減少するため、静電容量値が増大する。その一方、第3象限に位置する第1−3容量素子C13及び第2−3容量素子C23、並びに、第4象限に位置する第1−4容量素子C14及び第2−4容量素子C24は、固定電極と変位電極との離間距離が増大するため、静電容量値が減少する。
From the above, the following can be understood. That is, when a force + Fy in the Y-axis positive direction acts on the
したがって、検出回路150は、以下の[式4]を用いて、作用したY軸方向の力Fyを計測する。[式4]においてFy1は、第1変形体141の弾性変形に基づいて計測されたY軸方向の力であり、Fy2は、第2変形体142の弾性変形に基づいて計測されたY軸方向の力である。
[式4]
Fy1=C11+C12−C13−C14
Fy2=C21+C22−C23−C24
Therefore, the
[Formula 4]
Fy1 = C11 + C12-C13-C14
Fy2 = C21 + C22-C23-C24
前述したように、静電容量タイプの力覚センサ101cにおいては、相対的に高感度である第2−1〜第2−4容量素子C21〜C24の静電容量値の変動量に基づいて、すなわち、X軸方向の力Fxを求める際には[式3]のFx2に基づいて、Y軸方向の力Fyを求める際には[式4]のFy2に基づいて、作用した力を計測することにより、S/Nに優れた計測が可能となる。もちろん、第1−1〜第1−4容量素子C11〜C14の静電容量値の変動量に基づいて、作用した力を計測しても良い。
As described above, in the capacitance
ここでは、第1−1〜第1−4容量素子C11〜C14及び第2−1〜第2−4容量素子C21〜C24の合計8つの容量素子が設けられた力覚センサ101cを例に説明を行った。しかしながら、X軸方向の力Fx及び/またはY軸方向の力Fyを計測するのみであれば、第1−1〜第1−4容量素子C11〜C14及び第2−1〜第2−4容量素子C21〜C24の一方のみが設けられていれば良い。
Here, the
なお、作用する力の向きがX軸負方向である場合には、各容量素子C11〜C24の静電容量値の変動がすべて逆になる。このため、[式3]によって計測される力Fx1及びFx2は、共に符号が逆になる。すなわち、[式3]によって、作用した力Fxの向き(符号)と大きさとが計測されることになる。このことは、[式4]を用いてY軸方向の力Fyを計測する場合においても同様である。 Note that when the direction of the acting force is the negative direction of the X-axis, all the variations in the capacitance values of the capacitive elements C11 to C24 are reversed. For this reason, the signs of the forces Fx1 and Fx2 measured by [Equation 3] are reversed. That is, the direction (sign) and magnitude of the applied force Fx are measured by [Equation 3]. The same applies to the case where the force Fy in the Y-axis direction is measured using [Equation 4].
次に、歪ゲージタイプの力覚センサ101sによってX軸方向の力を計測する方法について、図18を参照して説明する。
Next, a method for measuring the force in the X-axis direction by the strain gauge
図18は、図8の基本構造101の可動部120にX軸正方向の力が作用した時に変形体140の検出部位A〜Dに生じる応力を説明するための図である。第1変形体141及び第2変形体142に生じる弾性変形は、程度は異なるもののその傾向は同一であることから、図18においては、簡単のため、単一の変形体140のみを示している。各検出部位A〜Dの配置は、図16及び図17と同様である。図18において、黒塗りの太い矢印は、作用する力の方向を示しており、細い矢印は、各検出部位A〜Dに生じる応力(「→ ←」は圧縮応力、「← →」は引張応力)を示している。
FIG. 18 is a diagram for explaining the stress generated in the detection portions A to D of the
図18に示すように、基本構造101の可動部120にX軸正方向の力+Fxが作用すると、変形体140は、図16と同様に弾性変形する。このとき、各検出部位A〜Dにおける曲率半径の変化に着目すると、図18に示すように、第1象限及び第4象限に位置する検出部位A、Dは、曲率半径が大きくなるように撓み、その一方、第2象限及び第3象限に位置する検出部位B、Cは、曲率半径が小さくなるように撓む。このような撓み変形に起因して、第1象限及び第4象限に位置する検出部位A、Dにおいては、圧縮応力が生じ、第2象限及び第3象限に位置する検出部位B、Cにおいては、引張応力が生じる。
As shown in FIG. 18, when a force + Fx in the X-axis positive direction acts on the
以上から、次のことが理解される。すなわち、図12に示す力覚センサ101sの可動部120にX軸正方向の力+Fxが作用すると、第1象限に配置された第1−1歪ゲージR11及び第2−1歪ゲージR21、並びに、第4象限に位置する第1−4歪ゲージR14及び第2−4歪ゲージR24は、圧縮応力によって、電気抵抗値が減少する。その一方、第2象限に配置された第1−2歪ゲージR12及び第2−2歪ゲージR22、並びに、第3象限に位置する第1−3歪ゲージR13及び第2−3歪ゲージR23は、引張応力によって、電気抵抗値が増大する。
From the above, the following can be understood. That is, when a force + Fx in the X-axis positive direction acts on the
したがって、検出回路150は、以下の[式5]を用いて、作用したX軸方向の力Fxを計測する。[式5]においてFx1は、第1変形体141の弾性変形に基づいて計測されたX軸方向の力であり、Fx2は、第2変形体142の弾性変形に基づいて計測されたX軸方向の力である。
[式5]
Fx1=−R11+R12+R13−R14
Fx2=−R21+R22+R23−R24
Therefore, the
[Formula 5]
Fx1 = −R11 + R12 + R13−R14
Fx2 = −R21 + R22 + R23−R24
次に図19を参照して、Y軸正方向の力+Fyを計測するための原理について説明する。図19は、図8の基本構造101の可動部にY軸正方向の力+Fyが作用した時に変形体の検出部140に生じる応力を説明するための図である。第1変形体141及び第2変形体142に生じる弾性変形は、程度は異なるもののその傾向は同一であることから、図19においても、簡単のため、単一の変形体140のみを示している。また、簡単のため、固定部110、及び、固定部110と変形体140とを連結する連結体の図示を省略しているが、図19の点P1及び点P2は、原点Oに対して相対移動しない。各検出部位A〜Dの配置は、図16及び図17と同様である。図19において、黒塗りの太い矢印は、作用する力の方向を示しており、細い矢印は、各検出部位A〜Dに生じる応力(「→ ←」は圧縮応力、「← →」は引張応力)を示している。
Next, the principle for measuring the force + Fy in the Y-axis positive direction will be described with reference to FIG. FIG. 19 is a view for explaining the stress generated in the
図19に示すように、基本構造101の可動部120にY軸正方向の力+Fyが作用すると、変形体140は、図17と同様に弾性変形する。このとき、各検出部位A〜Dにおける曲率半径の変化に着目すると、図19に示すように、第1象限及び第2象限に位置する検出部位A、Bは、曲率半径が小さくなるように撓み、その一方、第3象限及び第4象限に位置する検出部位C、Dは、曲率半径が大きくなるように撓む。このような撓み変形に起因して、第1象限及び第2象限に位置する検出部位A、Bにおいては、引張応力が生じ、第3象限及び第4象限に位置する検出部位C、Dにおいては、圧縮応力が生じる。
As shown in FIG. 19, when a force + Fy in the Y-axis positive direction acts on the
以上から、次のことが理解される。すなわち、図12に示す力覚センサ101sの可動部120にY軸正方向の力+Fyが作用すると、第1象限に配置された第1−1歪ゲージR11及び第2−1歪ゲージR21、並びに、第2象限に位置する第1−2歪ゲージR12及び第2−2歪ゲージR22は、引張応力によって、電気抵抗値が増大する。その一方、第3象限に配置された第1−3歪ゲージR13及び第2−3歪ゲージR23、並びに、第4象限に位置する第1−4歪ゲージR14及び第2−4歪ゲージR24は、圧縮応力によって、電気抵抗値が減少する。
From the above, the following can be understood. That is, when a force + Fy in the Y-axis positive direction acts on the
したがって、検出回路150は、以下の[式6]を用いて、作用したY軸方向の力Fyを計測する。[式6]においてFy1は、第1変形体141の弾性変形に基づいて計測されたY軸方向の力であり、Fy2は、第2変形体142の弾性変形に基づいて計測されたY軸方向の力である。
[式6]
Fy1=R11+R12−R13−R14
Fy2=R21+R22−R23−R24
Therefore, the
[Formula 6]
Fy1 = R11 + R12-R13-R14
Fy2 = R21 + R22-R23-R24
歪ゲージタイプの力覚センサ101sにおいては、相対的に高感度である第1−1〜第1−4歪ゲージR11〜R14の電気抵抗値の変動量に基づいて、作用した力を計測することにより、S/Nに優れた計測が可能となる。もちろん、第2−1〜第2−4歪ゲージR21〜R24の電気抵抗値の変動量に基づいて、作用した力を計測しても良い。
In the strain gauge
ここでは、第1−1〜第1−4歪ゲージR11〜R14及び第2−1〜第2−4歪ゲージR21〜R24の合計8つの歪ゲージが設けられた力覚センサ101sを例に説明を行った。しかしながら、X軸方向の力Fx及び/またはY軸方向の力Fyを計測するのみであれば、第1−1〜第1−4歪ゲージR11〜R14及び第2−1〜第2−4歪ゲージR21〜R24の一方のみが設けられていれば良い。
Here, the
なお、作用する力の向きがX軸負方向あるいはY軸負方向である場合には、各歪ゲージR11〜R24の電気抵抗値の変動量がすべて逆になる。このため、[式5]によって計測される力Fx1及びFx2は、共に符号が逆になる。すなわち、[式5]によって、作用した力の向き(符号)と大きさとが計測されることになる。このことは、[式6]を用いてY軸方向の力を計測する場合においても同様である。 In addition, when the direction of the acting force is the X-axis negative direction or the Y-axis negative direction, the variation amounts of the electric resistance values of the strain gauges R11 to R24 are all reversed. For this reason, the signs of the forces Fx1 and Fx2 measured by [Equation 5] are reversed. That is, the direction (sign) and magnitude of the applied force are measured by [Equation 5]. The same applies to the case where the force in the Y-axis direction is measured using [Equation 6].
以上に説明した歪ゲージタイプの力覚センサ101sでは、各歪ゲージR11〜R24がV軸及びW軸上において変形体141、142の径方向内側の面に配置されていても良い。この場合の各歪ゲージR11〜R24の電気抵抗値、各歪ゲージR11〜R24が変形体141、142の径方向外側の面に配置されている場合に可動部120に作用した力による電気抵抗値の変動とは、逆の変動が生じる。従って、以上に説明した[式5]及び[式6]の右辺または左辺の符号を反転させることで、この場合においても作用した力ないしモーメントの向き(符号)及び大きさの計測が可能となる。
In the strain gauge
< 2−5. 波形の検出部位を有する基本構造 >
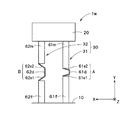
次に、図20は、変形体141、142の各検出部位A1〜A4、B1〜B4に図5に示す構造が採用された環状の基本構造101wを示す概略上面図であり、図21は、図21に示す基本構造101wの第1−1検出部位A1をV軸正方向から見た概略側面図である。
<2-5. Basic structure with waveform detection section>
Next, FIG. 20 is a schematic top view showing an annular
図20及び図21に示すように、基本構造101wの各検出部位A1〜A4、B1〜B4は、すべて、図5に示す構造を有する、下に凸の波形の検出部位である。第1変形体141の各検出部位A1〜A4は、すべて同一の構造を有している。更に、第2変形体142の各検出部位B1〜B4は、すべて同一の構造を有している。一方、第2変形体142の各検出部位B1〜B4は、第1変形体141の各検出部位A1〜A4よりも、周方向において相対的に長い。具体的には、各変形体141、142の周方向において、第2−1〜第2−4検出部位B1〜B4の一対の第2変形部62e1、62e2は、第1−1〜第1−4検出部位A1〜A4の一対の第1変形部61e1、61e2よりも、長く、よりXY平面に対して寝た状態となっている。更に、各変形体141、142の周方向において、第2−1〜第2−4検出部位B1〜B4の第2変位部62dは、第1−1〜第1−4検出部位A1〜A4の第1変位部61dよりも、長い。このような構成によって、力ないしモーメントの作用によって生じる変位は、第1変位部61dよりも第2変位部62dの方が、相対的に大きい。換言すれば、第1−1〜1−4検出部位A1〜A4のバネ定数よりも第2検出部位Bのバネ定数の方が相対的に小さい。ここで、バネ定数とは、可動部20に作用した力を各検出部位A1〜A4、B1〜B4に生じたZ軸方向の変位で除した値を意味している。
As shown in FIGS. 20 and 21, the detection portions A1 to A4 and B1 to B4 of the
次に、このような基本構造101wの作用について、図22を参照して説明する。
Next, the operation of the
図22は、図20の基本構造101wの可動部120に対してZ軸周りのモーメントMzが右回りに作用した時に、各変形体141、142の検出部位A1〜A4、B1〜B4に生じる応力を説明するための図である。図22において、可動部120上に示された黒塗りの太い矢印は、作用するモーメント−Mzを示しており、第1変形体141と第2変形体142との隙間に示された黒塗りの太い矢印は、各検出部位A1〜A4、B1〜B4に作用する力の方向を示している。
FIG. 22 shows stresses generated in the detection portions A1 to A4 and B1 to B4 of the
図22に示すように、第1象限に位置する第1−1検出部位A1及び第2−1検出部位B1、並びに、第3象限に位置する第1−3検出部位A3及び第2−3検出部位B3には、引張力が生じる。一方、第2象限に位置する第1−2検出部位A2及び第2−2検出部位B2、並びに、第4象限に位置する第1−4検出部位A4及び第2−4検出部位B4には、圧縮力が生じる。 As shown in FIG. 22, the 1-1 detection site A1 and the 2-1 detection site B1 located in the first quadrant, and the 1-3 detection site A3 and the 2-3 detection located in the third quadrant. A tensile force is generated at the site B3. On the other hand, the 1-2 detection site A2 and the 2-2 detection site B2 located in the second quadrant, and the 1-4 detection site A4 and the 2-4 detection site B4 located in the 4th quadrant, A compressive force is generated.
基本構造101wを静電容量タイプの力覚センサとして利用する際には、第1−1〜第1−2検出部位A1〜A4及び第2−1〜第2−4検出部位B1〜B4の各変位部61d、62dに容量素子を配置すればよい。具体的な配置方法としては、例えば第1−1検出部位A1においては、図21に示すように、変位部61dに変位基板Im11を介して変位電極Em11を設け、これらの変位電極Em11に対向するように、固定部110に対して相対移動しないように固定電極Ef11を配置すればよい。固定電極Ef11は、固定基板If11(絶縁体)を介して固定基板73上に配置されている。このような配置は、他の変位部61d、62dにおいても同じである。図21から理解されるように、ここで採用される変位電極Em11及び固定電極Ef11は、いずれもXY平面と平行な面を有し、Z軸方向において所定の距離で離間している。このようにして、対向する各8つの変位電極及び固定電極の組によって、合計8つの容量素子C11〜C14、C21〜C24が構成される。
When the
このような静電容量タイプの力覚センサにZ軸正方向から見て右回りのモーメント−Mzが作用した時の、各容量素子C11〜C24の静電容量値の変動について検討すると、次の通りである。すなわち、各検出部位A1〜A4、B1〜B4には、上述したとおりの引張力ないし圧縮力が作用する。このため、第1象限に配置された第1−1容量素子C11及び第2−1容量素子C21、並びに、第3象限に配置された第1−3容量素子C13及び第2−3容量素子C23は、いずれも、変位電極と固定電極との間の離間距離が増大するため、静電容量値は減少する。一方、第2象限に配置された第1−2容量素子C12及び第2−2容量素子C22、並びに、第4象限に配置された第1−4容量素子C14及び第2−4容量素子C24は、いずれも、変位電極と固定電極との間の離間距離が減少するため、静電容量値は増大する。 Examining the variation of the capacitance values of the capacitive elements C11 to C24 when a clockwise moment -Mz as viewed from the positive direction of the Z-axis acts on such a capacitive force sensor, Street. That is, the tensile force or the compressive force as described above acts on each of the detection sites A1 to A4 and B1 to B4. Therefore, the first and second capacitive elements C11 and C21 arranged in the first quadrant, and the first and third capacitive elements C13 and C23 arranged in the third quadrant. In any case, since the distance between the displacement electrode and the fixed electrode increases, the capacitance value decreases. On the other hand, the first and second capacitive elements C12 and C22 arranged in the second quadrant, and the first and fourth capacitive elements C14 and C24 arranged in the fourth quadrant, In either case, the distance between the displacement electrode and the fixed electrode decreases, so that the capacitance value increases.
したがって、検出回路150は、以下の[式7]を用いて、作用したZ軸まわりのモーメントMzを計測する。[式7]においてMz1は、第1変形体141の弾性変形に基づいて計測されたZ軸周りのモーメントであり、Mz2は、第2変形体142の弾性変形に基づいて計測されたZ軸まわりのモーメントである。
[式7]
−Mz1=−C11+C12−C13+C14
−Mz2=−C21+C22−C23+C24
Therefore, the
[Formula 7]
-Mz1 = -C11 + C12-C13 + C14
-Mz2 = -C21 + C22-C23 + C24
前述したように、基本構造101wを用いた静電容量タイプの力覚センサにおいては、相対的に高感度である第2−1〜第2−4容量素子C21〜C24の静電容量値の変動量に基づいて作用した力を計測することにより、S/Nに優れた計測が可能となる。もちろん、第1−1〜第1−4容量素子C11〜C14の静電容量値の変動量に基づいて、作用した力を計測しても良い。
As described above, in the capacitance type force sensor using the
なお、作用するモーメントの向きが逆向き(Z軸正方向から見て左回り)である場合には、各容量素子C11〜C24の静電容量値の変動量がすべて逆になる。このため、[式7]によって計測されるモーメントMz1及びMz2は、共に符号が逆になる。すなわち、[式7]によって、作用したモーメントMzの向きと大きさとが計測されることになる。 When the direction of the acting moment is reverse (counterclockwise when viewed from the positive direction of the Z axis), the variation amounts of the capacitance values of the capacitive elements C11 to C24 are all reversed. For this reason, the signs of the moments Mz1 and Mz2 measured by [Expression 7] are reversed. That is, the direction and magnitude of the applied moment Mz are measured by [Equation 7].
あるいは、基本構造101wを歪ゲージタイプの力覚センサとして利用する際には、第1−1〜第1−2検出部位A1〜A4及び第2−1〜第2−4検出部位B1〜B4の各変位部61d、62dに設けられた容量素子C11〜C24に代えて、具体的には変位電極に代えて、歪ゲージR11〜R24を配置すればよい。この場合、変位部61d、62dは弾性体で構成されていることが必要である。
Alternatively, when the
このような歪ゲージタイプの力覚センサにZ軸正方向から見て右回りのモーメント−Mzが作用した時の、各歪ゲージR11〜R24の電気抵抗値の変動について検討すると、次の通りである。すなわち、各検出部位A1〜A4、B1〜B4には、上述したとおりの引張力ないし圧縮力が作用する。このため、第1象限に配置された第1−1歪ゲージR11及び第2−1歪ゲージR21、並びに、第3象限に配置された第1−3歪ゲージR13及び第2−3歪ゲージR23は、いずれも、圧縮応力の作用(図7(c)参照)によって、電気抵抗値が減少する。一方、第2象限に配置された第1−2歪ゲージR12及び第2−2歪ゲージR22、並びに、第4象限に配置された第1−4歪ゲージR14及び第2−4歪ゲージR24は、いずれも、引張応力の作用(図7(b)参照)によって、電気抵抗値が増大する。 Examining fluctuations in the electrical resistance values of the strain gauges R11 to R24 when a clockwise moment -Mz as viewed from the positive direction of the Z-axis acts on such a strain gauge type force sensor is as follows. is there. That is, the tensile force or the compressive force as described above acts on each of the detection sites A1 to A4 and B1 to B4. Therefore, the 1-1 strain gauge R11 and the 2-1 strain gauge R21 arranged in the first quadrant, and the 1-3 strain gauge R13 and the 2-3 strain gauge R23 arranged in the third quadrant. In either case, the electric resistance value is reduced by the action of compressive stress (see FIG. 7C). On the other hand, the 1-2 strain gauge R12 and the 2-2 strain gauge R22 arranged in the second quadrant, and the 1-4 strain gauge R14 and the second-4 strain gauge R24 arranged in the fourth quadrant, In either case, the electrical resistance value is increased by the action of the tensile stress (see FIG. 7B).
したがって、検出回路150は、以下の[式8]を用いて、作用したZ軸まわりのモーメントMzを計測する。[式8]においてMz1は、第1変形体141の弾性変形に基づいて計測されたZ軸周りのモーメントであり、Mz2は、第2変形体142の弾性変形に基づいて計測されたZ軸まわりのモーメントである。
[式8]
−Mz1=−R11+R12−R13+R14
−Mz2=−R21+R22−R23+R24
Therefore, the
[Formula 8]
-Mz1 = -R11 + R12-R13 + R14
-Mz2 = -R21 + R22-R23 + R24
前述したように、基本構造101wを用いた歪ゲージタイプの力覚センサにおいては、相対的に高感度である第1−1〜第1−4歪ゲージR11〜R14の電気抵抗値の変動量に基づいて作用した力を計測することにより、S/Nに優れた計測が可能となる。もちろん、第2−1〜第2−4歪ゲージR21〜R24の電気抵抗値の変動量に基づいて、作用した力を計測しても良い。また、計測に当たり、第1−1〜第1−4歪ゲージR11〜R14または第2−1〜第2−4歪ゲージR21〜R24によりホイートストンブリッジ回路(不図示)を構成することによって、作用したモーメントを計測することも可能である。
As described above, in the strain gauge type force sensor using the
< 2−6. 波形の検出部位を有する基本構造による、X軸方向の力Fx及びY軸方向の力Fyの計測原理 >
以上の説明においては、図20に示す基本構造101wを用いてZ軸周りのモーメントMzを計測する方法について説明したが、本力覚センサは、X軸方向の力Fx及びY軸方向の力Fyをも計測することが可能である。一例として、図23を参照してX軸正方向の力+Fxを計測するための原理について説明する。
<2-6. Principle of measurement of force Fx in the X-axis direction and force Fy in the Y-axis direction by a basic structure having a waveform detection portion>
In the above description, the method of measuring the moment Mz around the Z-axis using the
図23は、図20の基本構造の可動部120にX軸正方向の力が作用した時に変形体の検出部位A1〜A4、B1〜B4に作用する力を説明するための図である。図23において、X軸と平行に示された黒塗りの太い矢印は、作用する力+Fxを示しており、第1変形体141と第2変形体142との隙間に示された黒塗りの太い矢印は、各検出部位A1〜A4、B1〜B4に作用する力の方向を示している。
FIG. 23 is a diagram for explaining the forces acting on the detection parts A1 to A4 and B1 to B4 of the deformed body when a force in the X-axis positive direction is applied to the
図23に示すように、基本構造101wの可動部120にX軸正方向の力+Fxが作用すると、各変形体141、142のうち、第1象限に位置する第1−1検出部位A1及び第2−1検出部位B1、並びに、第4象限に位置する第1−4検出部位A4及び第2−4検出部位B4には、引張力が作用する。一方、各変形体141、142のうち、第2象限に位置する第1−2検出部位A2及び第2−2検出部位B2、並びに、第3象限に位置する第1−3検出部位A3及び第2−3検出部位B3には、圧縮力が作用する。このことは、図16及び図18に示す変形体140の弾性変形の様子から、理解され得る。このため、基本構造101wにおいては、第1象限に位置する第1−1検出部位A1及び第2−1検出部位B1、並びに、第4象限に位置する第1−4検出部位A4及び第2−4検出部位B4においては、変位部61d、62dがZ軸正方向(図23における手前方向)に変位する。一方、第2象限に位置する第1−2検出部位A2及び第2−2検出部位B2、並びに、第3象限に位置する第1−3検出部位A3及び第2−3検出部位B3においては、変位部61d、62dがZ軸負方向(図23における奥行き方向)に変位する。
As shown in FIG. 23, when a force + Fx in the positive direction of the X-axis acts on the
換言すれば、基本構造101wを静電容量タイプの力覚センサとして利用した場合、第1象限に配置された第1−1容量素子C11及び第2−1容量素子C21、並びに、第4象限に配置された第1−4容量素子C14及び第2−4容量素子C24は、いずれも、静電容量値が減少する。一方、第2象限に配置された第1−2容量素子C12及び第2−2容量素子C22、並びに、第3象限に配置された第1−3容量素子C13及び第2−3容量素子C23は、いずれも、静電容量値が増大する。
In other words, when the
したがって、検出回路150は、以下の[式9]を用いて、作用したX軸方向の力Fxを計測する。[式10]においてFx1は、第1変形体141の弾性変形に基づいて計測されたX軸方向の力であり、Fx2は、第2変形体142の弾性変形に基づいて計測されたX軸方向の力である。
[式9]
Fx1=−C11+C12+C13−C14
Fx2=−C21+C22+C23−C24
Therefore, the
[Formula 9]
Fx1 = −C11 + C12 + C13−C14
Fx2 = −C21 + C22 + C23−C24
一方、図示されていないが、可動部120にY軸正方向の力+Fyが作用すると、図17及び図19に示す変形体140の弾性変形の様子から理解されるように、次のような静電容量値の変動が生じる。すなわち、第1象限に位置する第1−1容量素子C11及び第2−1容量素子C21、並びに、第2象限に位置する第1−2容量素子C12及び第2−2容量素子C22の静電容量値が増大し、第3象限に位置する第1−3容量素子C13及び第2−3容量素子C23、並びに、第4象限に位置する第1−4容量素子C14及び第2−4容量素子C24の静電容量値が減少する。
On the other hand, although not shown, when a force + Fy in the Y-axis positive direction acts on the
したがって、検出回路150は、以下の[式10]を用いて、作用したY軸方向の力Fyを計測する。[式10]においてFy1は、第1変形体141の弾性変形に基づいて計測されたY軸方向の力であり、Fy2は、第2変形体142の弾性変形に基づいて計測されたY軸方向の力である。
[式10]
Fy1=C11+C12−C13−C14
Fy2=C21+C22−C23−C24
Therefore, the
[Formula 10]
Fy1 = C11 + C12-C13-C14
Fy2 = C21 + C22-C23-C24
前述したように、基本構造101wを用いた静電容量タイプの力覚センサにおいては、相対的に高感度である第2−1〜第2−4容量素子C21〜C24の静電容量値の変動量に基づいて作用した力を計測することにより、S/Nに優れた計測が可能となる。もちろん、第1−1〜第1−4容量素子C11〜C14の静電容量値の変動量に基づいて、作用した力を計測しても良い。
As described above, in the capacitance type force sensor using the
なお、作用する力の向きがX軸負方向あるいはY軸負方向である場合には、各容量素子C11〜C24の静電容量値の変動量がすべて逆になる。このため、[式9]によって計測される力Fx1及びFx2は、共に符号が逆になる。すなわち、[式9]によって得られた力Fxの符号と大きさとを検討することにより、作用した力の向きと大きさとが計測されることになる。このことは、[式10]を用いてY軸方向の力を計測する場合においても同様である。 Note that when the direction of the acting force is the X-axis negative direction or the Y-axis negative direction, the variation amounts of the capacitance values of the capacitive elements C11 to C24 are all reversed. For this reason, the signs of the forces Fx1 and Fx2 measured by [Equation 9] are reversed. That is, by examining the sign and magnitude of the force Fx obtained by [Equation 9], the direction and magnitude of the applied force are measured. The same applies to the case where the force in the Y-axis direction is measured using [Equation 10].
一方、第1−1〜第1−4検出部位A1〜A4の各変位部61dに歪ゲージを配置すれば、基本構造101wを歪ゲージタイプの力覚センサとして利用することもできる。基本構造101wに力が作用した場合の各変位部61dに生じる応力については、既に図8にて説明した通りである。従って、図23に示す力Fxによれば、第1象限に配置された第1−1歪ゲージR11及び第2−1歪ゲージR21、並びに、第4象限に配置された第1−4歪ゲージR14及び第2−4歪ゲージR24は、圧縮応力の作用によって、電気抵抗値が減少する(図7(c)参照)。一方、第2象限に配置された第1−2歪ゲージR12及び第2−2歪ゲージR22、並びに、第3象限に配置された第1−3歪ゲージR13及び第2−3歪ゲージR23は、引張応力の作用によって、電気抵抗値が増大する(図7(b)参照)。
On the other hand, if a strain gauge is disposed in each of the
ここで、以下の点に注意して観察する必要がある。すなわち、図7において、変形体に圧縮応力が作用すると(図7(b)参照)、図中の細い矢印で示されるように、変位部61dのX軸負側の面に引張応力が生じ、変形体に引張力(図7(c)参照)が作用すると、変位部61dのX軸負側の面に圧縮応力が生じる。そのため、図22の第1象限に配置された歪ゲージR11、R21及び第4象限に配置された歪ゲージR14、R24は、圧縮応力の作用によって電気抵抗値が減少し、第2象限に配置された歪ゲージR12、R22及び第3象限に配置された歪ゲージR13、R14は、引張応力の作用によって電気抵抗値が増大する。
Here, the following points need to be observed carefully. That is, in FIG. 7, when compressive stress acts on the deformed body (see FIG. 7B), tensile stress is generated on the surface on the negative side of the X-axis of the
このことから、検出回路150は、以下の[式11]を用いて、作用したX軸方向の力Fxを計測する。[式11]においてFx1は、第1変形体141の弾性変形に基づいて計測されたX軸方向の力であり、Fx2は、第2変形体142の弾性変形に基づいて計測されたX軸方向の力である。
[式11]
Fx1=−R11+R12+R13−R14
Fx2=−R21+R22+R23−R24
From this, the
[Formula 11]
Fx1 = −R11 + R12 + R13−R14
Fx2 = −R21 + R22 + R23−R24
一方、図示されていないが、可動部120にY軸正方向の力+Fyが作用すると、図16及び図18に示す変形体140の弾性変形の様子から理解されるように、次のような電気抵抗値の変動が生じる。すなわち、第1象限に位置する第1−1歪ゲージR11及び第2−1歪ゲージR21、並びに、第2象限に位置する第1−2歪ゲージR12及び第2−2歪ゲージR22は、引張応力の作用(図7(c)参照)によって、電気抵抗値が増大する。その一方、第3象限に位置する第1−3歪ゲージR13及び第2−3歪ゲージR23、並びに、第4象限に位置する第1−4歪ゲージR14及び第2−4歪ゲージR24は、圧縮応力の作用(図7(b)参照)によって、電気抵抗値が減少する。
On the other hand, although not shown, when a positive force + Fy in the Y-axis acts on the
したがって、検出回路150は、以下の[式12]を用いて、作用したY軸方向の力Fyを計測する。[式12]においてFy1は、第1変形体141の弾性変形に基づいて計測されたY軸方向の力であり、Fy2は、第2変形体142の弾性変形に基づいて計測されたY軸方向の力である。
[式12]
Fy1=R11+R12−R13−R14
Fy2=R21+R22−R23−R24
Therefore, the
[Formula 12]
Fy1 = R11 + R12-R13-R14
Fy2 = R21 + R22-R23-R24
以上のような歪ゲージタイプの力覚センサの場合には、相対的に大きい応力が生じる第1−1〜第1−4検出部位A11〜A14に配置された歪ゲージR11〜R14の電気抵抗値の変動量に基づいて作用した力ないしモーメントを計測することにより、S/Nに優れた高感度の計測が可能となる。 In the case of the strain gauge type force sensor as described above, the electrical resistance values of the strain gauges R11 to R14 disposed in the first to first to fourth detection portions A11 to A14 where a relatively large stress is generated. By measuring the force or moment acting on the basis of the fluctuation amount, it is possible to perform highly sensitive measurement excellent in S / N.
<<< §3. 本発明による力覚センサの故障診断の原理 >>>
本発明による基本構造1、101、101wを用いた力覚センサは、単一の力覚センサによって、故障診断を行うことが可能である。基本構造1、101、101wの各変形体30、141、142は、可撓性を有するため、過負荷や繰り返し荷重によって金属疲労を生じる。このことにより、当該変形体30、141、142を構成する弾性体にクラック等が生じ、最終的には破断してしまう恐れがある。このため、故障診断を行うことが可能な力覚センサを提供できれば、力覚センサの信頼性及び安全性を高めることができる。なお、故障診断の原理については、例えば、本件出願人による国際出願PCT/JP2016/75236にも記載されている。
<<< §3. Principle of force sensor failure diagnosis according to the present invention >>>
The force sensor using the
< 3−1. 静電容量タイプの力覚センサにおける故障診断>
まず、図1乃至図4に戻って、基本構造1を例にして、故障診断の原理を説明する。
<3-1. Fault Diagnosis in Capacitive Type Force Sensor>
First, referring back to FIGS. 1 to 4, the principle of failure diagnosis will be described using the
図1至図4に示す基本構造1に繰り返しの負荷(力−Fy)が作用すると、第1変形体31及び第2変形体32に金属疲労が生じる。この金属疲労が蓄積されると、第1変形体31及び第2変形体32の強度が低下し、最終的には各変形体31、32が破断することになる。一般的に、金属材料に金属疲労が蓄積すると、当該金属材料が軟化するため、各変形体31、32は、バネ定数が低下することになる。換言すれば、各変形体31、32は、金属疲労の蓄積によって、初期状態と比較して、力−Fyに対する感度が上昇する。このことは、図24と図25とを比較することによって、理解される。なお、本力覚センサ1cにおいて、金属疲労は、相対的に大きな応力が生じる第1変形体31において、顕著に発現する。このため、バネ定数の変化(低下)、すなわち力−Fyに対する感度の上昇は、第1変形体31において顕著である。
When a repeated load (force -Fy) acts on the
図24は、図3の力覚センサ1cに金属疲労が生じていない場合(初期状態)において、力覚センサ1cに作用する力の大きさと、当該力覚センサ1cから出力される第1電気信号T1a及び第2電気信号T2aと、の関係を示すグラフであり、図25は、図3の力覚センサ1cに金属疲労が生じている場合において、力覚センサ1cに作用する力の大きさと、当該力覚センサ1cから出力される第1電気信号T1b及び第2電気信号T2bと、の関係を示すグラフである。T1及びT2の末尾の符号は、初期状態における電気信号(末尾にaを付加)と、金属疲労が蓄積している状態における電気信号(末尾にbを付加)と、を区別するためのものである。第1電気信号T1a、T1bとは、第1容量素子C1の静電容量値の変動量を示す電気信号であり、第2電気信号T2a、T2bとは、第2容量素子C2の静電容量値の変動量を示す電気信号である。
FIG. 24 shows the magnitude of the force acting on the
図24から理解されるように、バネ定数の低下(感度の上昇)が相対的に大きい第1変形体31に設けられた第1容量素子C1に対応する第1電気信号T1に着目すると、初期状態においては、第1電気信号T1aの直線の傾き(感度)は0.5である。その一方、図25を参照すると、金属疲労が蓄積している状態においては、第1電気信号T1bを示す直線の傾き(感度)は0.75である。従って、感度が50%上昇している。
As understood from FIG. 24, when attention is paid to the first electric signal T1 corresponding to the first capacitor element C1 provided in the first
一方、バネ定数の低下(感度の上昇)が相対的に小さい第2変形体32に設けられた第2容量素子C2に対応する第2電気信号T2に着目すると、図24から理解されるように、初期状態においては、第2変形体32に配置された第2容量素子C2に対応する第2電気信号T2aを示す直線の傾き(感度)は2.0である。一方、図25から理解されるように、金属疲労が蓄積している状態においては、第2容量素子C2に対応する第2電気信号T2bを示す直線の傾き(感度)は2.4である。従って、感度の上昇は20%にとどまっている。
On the other hand, when attention is paid to the second electric signal T2 corresponding to the second capacitive element C2 provided in the second
ここで着目すべきは、第1変形体31と第2変形体32とで、金属疲労の発現の程度が異なっているということである。すなわち、初期状態においては、第1電気信号T1aと第2電気信号T2aとの比率(T1a/T2a)は、0.25であるのに対し、金属疲労が蓄積している状態においては、第1電気信号T1bと第2電気信号T2bとの比率(T1b/T2b)は、0.3125に上昇しているということである。この比率T1/T2は、繰り返しの負荷が作用することに伴って、0.25から0.3125まで次第に上昇するため、この比率の変化に着目することによって、力覚センサ1cの故障診断が行われるのである。
It should be noted here that the
具体的には、力−Fyを第2変形体32に配置された第2容量素子C2の静電容量値の変動量に基づいて計測しつつ、第1電気信号T1と第2電気信号T2との比率と、初期状態における第1電気信号T1aと第2電気信号T2aとの比率と、の差が所定の範囲内にあるか否かを評価することによって、力覚センサ1cが正常に機能しているか否かが判定される。もちろん、作用した力−Fyは、第1容量素子C1の静電容量値の変動量に基づいて計測されても良い。
Specifically, the first electric signal T1 and the second electric signal T2 are measured while measuring the force -Fy based on the variation amount of the capacitance value of the second capacitance element C2 arranged in the second
< 3−2. 歪ゲージタイプの力覚センサにおける故障診断>
歪ゲージタイプの力覚センサ1sにおいても、同様にして故障新診断を行うことができる。すなわち、図示されていないが、力覚センサ1sにY軸負方向の力−Fyが作用すると、前述したように、第1歪ゲージR1及び第2歪ゲージR2は、電気抵抗値が共に増大する。従って、電気抵抗値を縦軸に、作用したY軸負方向の力−Fyを横軸にとり、これらの関係をグラフに表すと、図24及び図25と同様の直線となる。但し、この場合も、力覚センサ1sの使用に伴って、すなわち各変形体31、32に金属疲労が蓄積することに伴って、当該各変形体31、32が軟化(バネ定数が低下)する。この軟化によって、各変形体31、32の検出部位A、Bに生じる変位が増加し、それに応じて歪ゲージに作用する応力は増大する。本力覚センサ1sにおいても、金属疲労は、相対的に大きな応力が生じる第1変形体31において、顕著に発現する。このため、バネ定数の変化(低下)は、第1変形体31において顕著である。歪ゲージタイプの力覚センサ1sにおいては、変形体30のバネ定数が小さいほど当該変形体に生じる応力が小さいことから、バネ定数が低下すると感度は上昇することになる。すなわち、バネ定数の低下によって、各弾性体31、32は、力−Fyに対する感度が上昇する。
<3-2. Fault diagnosis of strain gauge type force sensor>
In the strain gauge
以上から、第1歪ゲージの電気抵抗値の変動量を表す電気信号をT1とし、第2歪ゲージR2の電気抵抗値の変動量を表す電気信号をT2とすると、第1電気信号T1と第2電気信号T2との比率(T1/T2)が、初期状態の場合と金属疲労が蓄積した場合とで異なることになる。このことを利用して、力覚センサ1sの故障診断が行われるのである。
From the above, when the electric signal representing the fluctuation amount of the electric resistance value of the first strain gauge is T1, and the electric signal representing the fluctuation amount of the electric resistance value of the second strain gauge R2 is T2, the first electric signal T1 and the first electric signal The ratio (T1 / T2) to the two electrical signals T2 differs between the initial state and the case where metal fatigue has accumulated. Using this fact, failure diagnosis of the
以下、力覚センサ1sにおいて故障診断を行うための原理について、図26及び図27を参照して説明する。図26は、図4の力覚センサ1sに金属疲労が生じていない場合(初期状態)において、力覚センサ1sに作用するY軸負方向の力−Fyの大きさと、当該力覚センサ1sから出力される第1電気信号T1a及び第2電気信号T2aと、の関係を示すグラフであり、図27は、図4の力覚センサ1sに金属疲労が生じている場合において、力覚センサ1sに作用するY軸負方向の力−Fyの大きさと、当該力覚センサ1sから出力される第1電気信号T1b及び第2電気信号T2bと、の関係を示すグラフである。第1電気信号T1a、T1bとは、第1歪ゲージR1の電気抵抗値の変動量を示す電気信号であり、第2電気信号T2a、T2bとは、第2歪ゲージR2の電気抵抗値の変動量を示す電気信号である。ここでも、T1及びT2の末尾の符号は、初期状態における電気信号(末尾にaを付加)と、金属疲労が蓄積している状態における電気信号(末尾にbを付加)と、を区別するためのものである。
Hereinafter, the principle for performing failure diagnosis in the
図26から理解されるように、バネ定数の低下(感度の上昇)が相対的に大きい第1変形体に設けられた第1歪ゲージR1に対応する第1電気信号T1に着目すると、初期状態においては、第1電気信号T1aの直線の傾き(感度)は2.0である。その一方、図27を参照すると、金属疲労が蓄積している状態においては、第1電気信号T1bを示す直線の傾き(感度)は2.8である。従って、感度が40%上昇している。 As can be understood from FIG. 26, when attention is paid to the first electric signal T1 corresponding to the first strain gauge R1 provided in the first deformable body in which the decrease in spring constant (increase in sensitivity) is relatively large, the initial state , The slope (sensitivity) of the straight line of the first electric signal T1a is 2.0. On the other hand, referring to FIG. 27, in a state where metal fatigue is accumulated, the slope (sensitivity) of the straight line indicating the first electric signal T1b is 2.8. Therefore, the sensitivity is increased by 40%.
一方、バネ定数の低下(感度の上昇)が相対的に小さい第2変形体32に設けられた第2歪ゲージR2に対応する第2電気信号T2に着目すると、図26から理解されるように、初期状態においては、第2電気信号T2aを示す直線の傾き(感度)は0.5である。一方、図27から理解されるように、金属疲労が蓄積している状態においては、第2歪ゲージR2に対応する第2電気信号T2bを示す直線の傾き(感度)は0.6である。従って、感度の上昇は20%にとどまっている。
On the other hand, when attention is paid to the second electric signal T2 corresponding to the second strain gauge R2 provided in the second
ここで着目すべきは、第1変形体31と第2変形体32とで、金属疲労の発現の程度が異なっているということである。すなわち、初期状態においては、第1電気信号T1aと第2電気信号T2aとの比率(T1a/T2a)は、4.0であるのに対し、金属疲労が蓄積している状態においては、第1電気信号T1bと第2電気信号T2bとの比率(T1b/T2b)は、4.667に増大しているということである。この比率T1/T2は、繰り返しの負荷が作用することに伴って、4.0から4.667まで次第に増大するため、この比率の変化に着目することによって、力覚センサ1sの故障診断が行われるのである。
It should be noted here that the
具体的には、力−Fyを第1変形体31に配置された第1歪ゲージR1の電気抵抗値の変動量に基づいて計測しつつ、第1電気信号T1と第2電気信号T2との比率と、初期状態における第1電気信号T1aと第2電気信号T2aとの比率と、の差が所定の範囲内にあるか否かを評価することによって、力覚センサ1sが正常に機能しているか否かが判定される。もちろん、作用した力−Fyは、第2歪ゲージR2の電気抵抗値の変動量に基づいて計測されても良い。
Specifically, the force -Fy is measured based on the fluctuation amount of the electric resistance value of the first strain gauge R1 disposed in the first
< 3−3. その他の力覚センサにおける故障診断>
(3−3−1. 図11に示す力覚センサ101cの場合)
以上のような故障診断は、図11の静電容量タイプの力覚センサ101cにおける故障診断においても採用が可能である。
<3-3. Fault diagnosis of other force sensors>
(3-3-1. In the case of the
The failure diagnosis as described above can also be employed in failure diagnosis in the capacitance
一例として、力覚センサ101cの受力体120に作用する右周りのモーメント−Mz(図9と同じモーメント)を利用して故障診断を行う方法について説明する。まず、上述した[式1]の−Mz1及び−Mz2に相当する電気信号を、第1電気信号T1及び第2電気信号T2とおく。すなわち、改めて第1電気信号T1及び第2電気信号T2を書き下すと、次の[式13]のようになる。
[式13]
T1=−C11+C12−C13+C14
T2=−C21+C22−C23+C24
As an example, a description will be given of a method for performing failure diagnosis using a clockwise moment -Mz (the same moment as in FIG. 9) acting on the
[Formula 13]
T1 = −C11 + C12−C13 + C14
T2 = −C21 + C22−C23 + C24
図11に示す力覚センサ101cにおいても、第1変形体141及び第2変形体142に金属疲労が蓄積することに伴って第1電気信号T1と第2電気信号T2との比率に変化が生じることを利用して、力覚センサの故障診断を行う。従って、ここでも、以下の説明においては、第1変形体141及び第2変形体142に金属疲労が蓄積していない初期状態での第1及び第2電気信号をそれぞれT1a、T2aとし、第1変形体141及び第2変形体142に金属疲労が蓄積している状態での第1及び第2電気信号をそれぞれT1b、T2bとして、互いに区別することとする。
Also in the
第1変形体141及び第2変形体142に金属疲労が蓄積していない初期状態において、力覚センサ101cに作用するモーメント−Mzの大きさと、この時の第1及び第2電気信号T1a、T2aと、の関係は、図24に示すグラフと同じである。また、第1変形体141及び第2変形体142に金属疲労が蓄積している状態において、力覚センサに作用するモーメント−Mzの大きさと、この時の第1及び第2電気信号T1a、T2aと、の関係は、図25に示すグラフと同じである。
In an initial state where metal fatigue is not accumulated in the first
力覚センサ101cが正常に機能しているか否かを判定するための原理及び方法は、上述の3−1.と同じである。すなわち、3−1.における第1電気信号T1(T1a、T1b)及び第2電気信号T2(T2a、T2b)を[式13]に読み替えることによって、力覚センサ101cの故障診断の原理及び方法が理解される。このため、ここでは、当該原理及び方法の詳細な説明は省略する。なお、逆回りのモーメント+Mzが作用しても、同様にして故障診断を行うことができる。
The principle and method for determining whether or not the
また、受力体120に作用するX軸方向の力Fxを利用して故障診断を行うことも可能である。この場合には、上述した[式3]のFx1及びFx2に相当する電気信号を、第1電気信号T1及び第2電気信号T2とすれば良い。すなわち、改めて第1電気信号T1及び第2電気信号T2を書き下すと、次の[式14]のようになる。
[式14]
T1=−C11+C12+C13−C14
T2=−C21+C22+C23−C24
It is also possible to perform failure diagnosis using the force Fx in the X-axis direction acting on the
[Formula 14]
T1 = −C11 + C12 + C13−C14
T2 = −C21 + C22 + C23−C24
ここでも、以下の説明においては、第1変形体141及び第2変形体142に金属疲労が蓄積していない初期状態での第1及び第2電気信号をそれぞれT1a、T2aとし、第1変形体141及び第2変形体142に金属疲労が蓄積している状態での第1及び第2電気信号をそれぞれT1b、T2bとして、互いに区別することとする。
Here again, in the following description, the first and second electric signals in the initial state in which metal fatigue has not accumulated in the first
第1変形体141及び第2変形体142に金属疲労が蓄積していない初期状態において、力覚センサ101cに作用する力Fxの大きさと、この時の第1及び第2電気信号T1a、T2aと、の関係は、図24に示すグラフと同じである。また、第1変形体141及び第2変形体142に金属疲労が蓄積している状態において、力覚センサ101cに作用する力Fxの大きさと、この時の第1及び第2電気信号T1a、T2aと、の関係は、図25に示すグラフと同じである。
In the initial state where metal fatigue is not accumulated in the first
力覚センサ101cが正常に機能しているか否かを判定するための原理及び方法は、上述の3−1.と同じである。すなわち、3−1.における第1電気信号T1(T1a、T1b)及び第2電気信号T2(T2a、T2b)を[式14]に読み替えることによって、力覚センサ101cの故障診断の原理及び方法が理解される。このため、ここでは、当該原理及び方法の詳細な説明は省略する。
The principle and method for determining whether or not the
更に、受力体120に作用するY軸方向の力Fyを利用して力覚センサ101cの故障診断を行うことも可能である。この場合には、上述した[式4]のFy1及びFy2に相当する電気信号を、第1電気信号T1及び第2電気信号T2とすれば良い。第1変形体141及び第2変形体142に金属疲労が蓄積していない初期状態において、力覚センサ101cに作用する力Fyの大きさと、この時の第1及び第2電気信号T1a、T2aと、の関係は、図24に示すグラフと同じである。また、第1変形体141及び第2変形体142に金属疲労が蓄積している状態において、力覚センサに作用する力Fyの大きさと、この時の第1及び第2電気信号T1a、T2aと、の関係は、図25に示すグラフと同じである。
Further, failure diagnosis of the
力覚センサ101cが正常に機能しているか否かを判定するための原理及び方法は、力Fxに基づいて故障診断をする場合と同じであるため、ここでは、その詳細な説明は省略する。
The principle and method for determining whether or not the
(3−3−2. 図12に示す力覚センサ101sの場合)
次に、以上のような故障診断は、図12に示す歪ゲージタイプのタイプの力覚センサ101sにおける故障診断においても採用が可能である。
(3-3-2. In the case of the
Next, the failure diagnosis as described above can also be employed in failure diagnosis in the strain gauge
一例として、力覚センサ101sの受力体120に作用する右周りのモーメント−Mz(図9と同じモーメント)を利用して故障診断を行う方法について説明する。まず、上述した[式2]の−Mz1及び−Mz2に相当する電気信号を、第1電気信号T1及び第2電気信号T2とおく。すなわち、改めて第1電気信号T1及び第2電気信号T2を書き下すと、次の[式15]のようになる。
[式15]
T1=−R11+R12−R13+R14
T2=−R21+R22−R23+R24
As an example, a description will be given of a method for performing failure diagnosis using a clockwise moment -Mz (the same moment as in FIG. 9) acting on the
[Formula 15]
T1 = −R11 + R12−R13 + R14
T2 = −R21 + R22−R23 + R24
図12に示す力覚センサ101sにおいても、第1変形体141及び第2変形体142に金属疲労が蓄積することに伴って第1電気信号T1と第2電気信号T2との比率に変化が生じることを利用して、力覚センサの故障診断を行う。従って、ここでも、以下の説明においては、第1変形体141及び第2変形体142に金属疲労が蓄積していない初期状態での第1及び第2電気信号をそれぞれT1a、T2aとし、第1変形体141及び第2変形体142に金属疲労が蓄積している状態での第1及び第2電気信号をそれぞれT1b、T2bとして、互いに区別することとする。
Also in the
第1変形体141及び第2変形体142に金属疲労が蓄積していない初期状態において、力覚センサ101sに作用するモーメント−Mzの大きさと、この時の第1及び第2電気信号T1a、T2aと、の関係は、図26に示すグラフと同じである。また、第1変形体141及び第2変形体142に金属疲労が蓄積している状態において、力覚センサ101sに作用するモーメント−Mzの大きさと、この時の第1及び第2電気信号T1a、T2aと、の関係は、図27に示すグラフと同じである。
In an initial state in which no metal fatigue is accumulated in the first
力覚センサ101sが正常に機能しているか否かを判定するための原理及び方法は、上述の3−2.と同じである。すなわち、3−2.における第1電気信号T1(T1a、T1b)及び第2電気信号T2(T2a、T2b)を[式15]に読み替えることによって、力覚センサ101sの故障診断の原理及び方法が理解される。このため、ここでは、当該原理及び方法の詳細な説明は省略する。もちろん、逆回りのモーメント+Mzが作用しても、同様にして故障診断を行うことができる。
The principle and method for determining whether or not the
また、受力体120に作用するX軸方向の力Fxを利用して故障診断を行うことも可能である。この場合には、上述した[式5]のFx1及びFx2に相当する電気信号を、第1電気信号T1及び第2電気信号T2とすれば良い。すなわち、改めて第1電気信号T1及び第2電気信号T2を書き下すと、次の[式16]のようになる。
[式16]
T1=−R11+R12+R13−R14
T2=−R21+R22+R23−R24
It is also possible to perform failure diagnosis using the force Fx in the X-axis direction acting on the
[Formula 16]
T1 = −R11 + R12 + R13−R14
T2 = −R21 + R22 + R23−R24
ここでも、以下の説明においては、第1変形体141及び第2変形体142に金属疲労が蓄積していない初期状態での第1及び第2電気信号をそれぞれT1a、T2aとし、第1変形体141及び第2変形体142に金属疲労が蓄積している状態での第1及び第2電気信号をそれぞれT1b、T2bとして、互いに区別することとする。
Here again, in the following description, the first and second electric signals in the initial state in which metal fatigue has not accumulated in the first
第1変形体141及び第2変形体142に金属疲労が蓄積していない初期状態において、力覚センサ101sに作用する力Fxの大きさと、この時の第1及び第2電気信号T1a、T2aと、の関係は、図26に示すグラフと同じである。また、第1変形体141及び第2変形体142に金属疲労が蓄積している状態において、力覚センサ101sに作用する力Fxの大きさと、この時の第1及び第2電気信号T1a、T2aと、の関係は、図27に示すグラフと同じである。
In the initial state where metal fatigue is not accumulated in the first
力覚センサ101sが正常に機能しているか否かを判定するための原理及び方法は、上述の3−2.と同じである。すなわち、3−2.における第1電気信号T1(T1a、T1b)及び第2電気信号T2(T2a、T2b)を[式16]に読み替えることによって、本実施の形態による力覚センサの故障診断の原理及び方法が理解される。このため、ここでは、当該原理及び方法の詳細な説明は省略する。
The principle and method for determining whether or not the
更に、受力体120に作用するY軸方向の力Fyを利用して故障診断を行うことも可能である。この場合には、上述した[式6]のFy1及びFy2に相当する電気信号を、第1電気信号T1及び第2電気信号T2とすれば良い。第1変形体141及び第2変形体142に金属疲労が蓄積していない初期状態において、力覚センサ101sに作用する力Fyの大きさと、この時の第1及び第2電気信号T1a、T2aと、の関係は、図26に示すグラフと同じである。また、第1変形体141及び第2変形体142に金属疲労が蓄積している状態において、力覚センサ101sに作用する力Fyの大きさと、この時の第1及び第2電気信号T1a、T2aと、の関係は、図27に示すグラフと同じである。
Further, failure diagnosis can be performed using the force Fy in the Y-axis direction acting on the
力覚センサ101sが正常に機能しているか否かを判定するための原理及び方法は、力Fxに基づいて故障診断をする場合と同じであるため、ここでは、その詳細な説明は省略する。
Since the principle and method for determining whether or not the
(3−3−3. 図13乃至図15に示す基本構造101a、101b、101b’を用いた力覚センサの場合)
次に、図13に示す基本構造101aを用いた、静電容量タイプの力覚センサにおける故障診断について説明する。この力覚センサは、図示されていないが、当該力覚センサのうちV軸及びW軸上に位置する8つの部位(第1−1〜第1−4検出部位A1〜A4及び第2−1〜第2−4検出部位B1〜B4)の全てに、容量素子C11〜C24が配置されているものとする。各容量素子C11〜C24を構成する電極の離間距離は全て同じであり、実効対向面積も全て同じであるものとする。
(3-3-3. Force Sensor Using
Next, failure diagnosis in a capacitance type force sensor using the
このような力覚センサにおける故障診断の原理及び方法は、3−3−1.にて説明した図10に示す静電容量タイプの力覚センサ101cの場合と実質的に同じである。但し、第2−1〜第2−4容量素子C21〜C24が第2変形体142の薄肉部142t1〜142t4上に配置されている。このため、作用した力(Fx、Fy)ないしモーメント(Mz)と、第1電気信号T1(T1a、T1b)及び第2電気信号T2(T2a、T2b)と、の関係を示すグラフは、図24及び図25に示す第2電気信号T2a、T2bの傾きよりも共に大きな傾きを有することになる。ただし、それらの傾きの比率は同じである。
The principle and method of failure diagnosis in such a force sensor are described in 3-3-1. This is substantially the same as the case of the capacitance
このことから、初期状態において、第1電気信号T1aと第2電気信号T2aとの比率(T1a/T2a)は、0.25となり、金属疲労が蓄積している状態において第1電気信号T1bと第2電気信号T2bとの比率(T1b/T2b)は、0.3125となる。 From this, in the initial state, the ratio (T1a / T2a) of the first electric signal T1a and the second electric signal T2a is 0.25, and the first electric signal T1b and the second electric signal T1a in the state where metal fatigue is accumulated. The ratio (T1b / T2b) to 2 electrical signals T2b is 0.3125.
次に、図14及び図15に示す基本構造101b、101b’を用いた、静電容量タイプの力覚センサにおける故障診断について説明する。これらの力覚センサにおいても、図示されていないが、各力覚センサのうちV軸及びW軸上に位置する8つの部位(第1−1〜第1−4検出部位A1〜A4及び第2−1〜第2−4検出部位B1〜B4)の全てに、容量素子C11〜C24が配置されているものとする。更に、各容量素子C11〜C24を構成する電極の離間距離は全て同じであり、実効対向面積も全て同じであるものとする。
Next, failure diagnosis in a capacitance type force sensor using the
これらの力覚センサも、前述したように、図13に示す基本構造101aを用いた力覚センサと同様に、第2−1〜第2−4容量素子C21〜C24が配置されている第2変形体142のみに薄肉部142t1〜142t4が設けられていることから、初期状態における第1電気信号T1aと第2電気信号T2aとの比率(T1a/T2a)、及び、金属疲労が蓄積している状態における第1電気信号T1bと第2電気信号T2bとの比率(T1b/T2b)は、図13に示す基本構造101aを用いた力覚センサの場合と同様の値となる。換言すれば、図14及び図15に示す基本構造101b、101b’を用いた静電容量タイプの力覚センサは、基本構造101aを用いた静電容量タイプの力覚センサと同様の特性を有している。従って、これらの力覚センサにおいても、故障診断の原理及び方法は、3−3−1.にて説明した図10に示す力覚センサ101cの場合と実質的に同じである。
As described above, these force sensors are the same as the force sensor using the
次に、図13に示す基本構造101aを用いた、歪ゲージタイプの力覚センサにおける故障診断について説明する。この力覚センサにおいては、図示されていないが、当該力覚センサのうちV軸及びW軸上に位置する8つの部位(第1−1〜第1−4検出部位A1〜A4及び第2−1〜第2−4検出部位B1〜B4)の全てに、歪ゲージR11〜R24が配置されているものとする。更に、各歪ゲージR11〜R24は、全て同じ特性を有しているものとする。
Next, failure diagnosis in a strain gauge type force sensor using the
このような力覚センサにおける故障診断の原理及び方法は、3−3−2.にて説明した図11に示す力覚センサ101sの場合と実質的に同じである。但し、第2−1〜第2−4歪ゲージR21〜R24が第2変形体142の薄肉部142t1〜142t4上に配置されている。このため、作用した力(Fx、Fy)ないしモーメント(Mz)と、第1電気信号(T1a、T1b)及び第2電気信号T2(T2a、T2b)と、の関係を示すグラフは、図26及び図27に示す第2電気信号T2a、T2bの傾きよりも共に大きな傾きを有することになる。但し、それらの傾きの比率は同じである。すなわち、初期状態において、第1電気信号T1aと第2電気信号T2aとの比率(T1a/T2a)は、4.0となり、金属疲労が蓄積している状態において第1電気信号T1bと第2電気信号T2bとの比率(T1b/T2b)は、4.667となる。
The principle and method of failure diagnosis in such a force sensor are described in 3-3-2. This is substantially the same as the case of the
次に、図14及び図15に示す基本構造101b、101b’を用いた、歪ゲージタイプの力覚センサにおける故障診断について説明する。これらの力覚センサにおいても、図示されていないが、各力覚センサのうちV軸及びW軸上に位置する8つの部位(第1−1〜第1−4検出部位A1〜A4及び第2−1〜第2−4検出部位B1〜B4)の全てに、歪ゲージR11〜R24が配置されているものとする。更に、各歪ゲージR11〜R24は、全て同じ特性を有するものとする。
Next, failure diagnosis in a strain gauge type force sensor using the
これらの力覚センサも、前述したように、図13に示す基本構造101aを用いた力覚センサと同様に、第2−1〜第2−4歪ゲージR11〜R24が配置されている第2変形体142のみに薄肉部142t1〜142t4が設けられていることから、初期状態における第1電気信号T1aと第2電気信号T2aとの比率(T1a/T2a)、及び、金属疲労が蓄積している状態における第1電気信号T1bと第2電気信号T2bとの比率(T1b/T2b)は、図13に示す基本構造101aを用いた力覚センサの場合と同様の値となる。換言すれば、図14及び図15に示す基本構造101b、101b’を用いた歪ゲージタイプの力覚センサは、基本構造101aを用いた歪ゲージタイプの力覚センサと同様の特性を有している。従って、これらの力覚センサにおいても、故障診断の原理及び方法は、3−3−2.にて説明した図11に示す力覚センサ101sの場合と実質的に同じである。
As described above, these force sensors also have second to second strain gauges R11 to R24 arranged in the same manner as the force sensor using the
<<< §4. 検出部位の更なる変形例 >>>
次に、図28は、以上の各実施の形態における基本構造の検出部位の変形例を示す概略側面図である。図28に示すように、本変形例による検出部位Eは、互いに一軸方向(図28におけるY軸方向)に相対移動可能であるように配置された第1接続部71及び第2接続部72の間に配置されている。検出部位Eは、弾性を有する材料(例えば金属)によって均一の厚さにて構成されており、X軸負方向(図29における右側)に膨らむように滑らかに湾曲した円弧状の形状を有している。図29に示すように、検出部位Eは、最もX軸負側(右側)に位置する部位を通るようにX軸と平行な仮想軸線Lを考慮したときに、Z軸方向から見て、当該仮想軸線に対して対称である。
<<< §4. Further modification of detection part >>>
Next, FIG. 28 is a schematic side view showing a modification of the detection site of the basic structure in each of the above embodiments. As shown in FIG. 28, the detection part E according to the present modification example has a
次に、このような検出部位Eの作用について、図29を参照して説明する。図29(a)は、図28に示す検出部位EにY軸方向の圧縮力が作用した時の、当該検出部位Eを示す概略図であり、図29(b)は、図28に示す検出部位EにY軸方向の引張力が作用した時の、当該検出部位Eを示す概略図である。後述されるように、検出部位Eが仮想軸線Lと交わる部位のうち、X軸負側の位置Rに検出素子(容量素子ないし歪ゲージ)が配置される。このため、ここでは、位置Rの変位ないし当該位置Rに生じる応力について詳述する。初期状態において、検出部位Eの表面には応力が生じていないものとする。また、図29において、黒塗りの太い矢印は、Y軸方向に沿って作用する力の方向を示しており、X軸と平行に配置された白抜きの太い矢印は、検出部位Eのうち最もX軸負側の位置Rに生じる変位の方向を示しており、細い矢印は、位置Rに生じる応力(「→ ←」は圧縮応力、「← →」は引張応力)を示している。 Next, the operation of such a detection site E will be described with reference to FIG. FIG. 29A is a schematic diagram illustrating the detection site E when a compressive force in the Y-axis direction is applied to the detection site E illustrated in FIG. 28, and FIG. 29B is a detection illustrated in FIG. It is the schematic which shows the said detection part E when the tensile force of the Y-axis direction acts on the part E. FIG. As will be described later, a detection element (capacitance element or strain gauge) is disposed at a position R on the negative side of the X axis in a region where the detection region E intersects the virtual axis L. Therefore, here, the displacement of the position R or the stress generated at the position R will be described in detail. It is assumed that no stress is generated on the surface of the detection site E in the initial state. In FIG. 29, the thick black arrow indicates the direction of the force acting along the Y-axis direction, and the white thick arrow arranged in parallel with the X-axis is the largest of the detection sites E. The direction of displacement generated at the position R on the X-axis negative side is shown, and the thin arrow indicates the stress generated at the position R (“→ ←” is compressive stress, “← →” is tensile stress).
まず、図29(a)に示すように、Y軸方向に沿って、第1接続部71が第2接続部72に近接するように相対移動されると、検出部位Eは、Y軸方向において圧縮される。これにより、位置Rは、X軸負方向に変位する。更に、この時、位置R近傍の曲率半径が小さくなるため、当該位置Rに、Y軸方向に沿って引張応力が生じる。一方、図29(b)に示すように、Y軸方向に沿って、第1接続部71が第2接続部72から離間するように相対移動されると、検出部位Eは、Y軸方向において伸張される。これにより、位置Rは、X軸正方向に変位する。
First, as shown in FIG. 29 (a), when the first connecting
また、検出部位Eに力が作用した時に位置Rに生じる応力について検討する。図29(a)に示すように、第1接続部71と第2接続部72の間に圧縮力が作用すると、位置R近傍の曲率半径が小さくなるため、位置Rには、Y軸方向に沿って引張応力が生じる。一方、図29(b)に示すように、第1接続部71と第2接続部72の間に引張力が作用すると、位置R近傍の曲率半径が大きくなるため、位置Rには、Y軸方向に沿って圧縮応力が生じる。結局、検出部位Eに作用する力の向き(圧縮か引張か)と位置Rに生じる応力の向き(圧縮か引張か)とは、互いに逆になる。なお、検出部位Eが仮想軸線Lと交わる部位のうち、X軸正側の位置R’に生じる応力の向き(圧縮か引張か)は、図29(a)及び図29(b)の変形の態様から理解されるように、検出部位Eに作用する力の向き(圧縮か引張か)と同じである。
Further, the stress generated at the position R when a force is applied to the detection site E will be examined. As shown in FIG. 29 (a), when a compressive force is applied between the first connecting
このような検出部位を図1に示す基本構造1に採用する場合には、第1変形体31に代えて、第1可動部側接続部31m及び第1固定部側接続部31fの間に上述した検出部位Eを第1検出部位E1として配置し、第2変形体32に代えて、第2可動部側接続部32m及び第2固定部側接続部32fの間に上述した検出部位Eを第2検出部位E2として配置すればよい。ただし、第2検出部位E2は、第1検出部位E1よりも大きな曲率半径を有するように構成される。このことにより、第2検出部位E2のバネ定数が第1検出部位E1のバネ定数よりも小さく設定される。
When such a detection site is employed in the
あるいは、このような検出部位を図8に示す環状の変形体141、142を有する基本構造101に採用する場合には、第1−1〜第1−4検出部位A1〜A4及び第2−1〜第2−4検出部位B1〜B4に対応する位置に上述した検出部位Eをそれぞれ配置すればよい。すなわち、第1−1〜第1−4検出部位A1〜A4及び第2−1〜第2−4検出部位B1〜B4に対応する8つの位置に周方向に沿って間隙を設け、当該間隙内に介在するように、図28に示す検出部位Eを配置すればよい。但し、第2−1〜第2−4検出部位B1〜B4に配置される4つの検出部位Eである第2検出部位E2は、第1−1〜第1−4検出部位A1〜A4に配置される4つの検出部位Eである第1検出部位E1よりも大きな曲率半径を有するように構成される。このことにより、第2検出部位E2のバネ定数が第1検出部位E1のバネ定数よりも小さく設定される。なお、第1検出部位E1の4つの検出部位Eは、互いに同一の構成で良く、更に、第2検出部位E2の4つの検出部位Eは、互いに同一の構成で良い。
Alternatively, when such a detection site is employed in the
具体的な配置例を、図30及び図31を参照して説明する。図30は、図28に示す検出部位を有する変形体の一例を示す概略上面図である。また、図31(a)は、図28に示す検出部位を有する変形体の他の例を示す概略上面図であり、図31(b)は、図31(a)のb−b線断面図である。検出部位は、第1変形体141及び第2変形体142に共通の形態で設けて良いため、図30及び図31においては、2つの変形体141、142を代表して、第1変形体141のみを図示している。
A specific arrangement example will be described with reference to FIGS. 30 and 31. FIG. FIG. 30 is a schematic top view showing an example of a deformed body having the detection site shown in FIG. FIG. 31 (a) is a schematic top view showing another example of the deformed body having the detection site shown in FIG. 28, and FIG. 31 (b) is a cross-sectional view taken along the line bb of FIG. 31 (a). It is. Since the detection site may be provided in a form common to the first
図30に示す第1変形体141は、Z軸方向から見てV軸及びW軸と重なる位置を含む領域が図28に示す検出部位E1で置換されている。ここでは、各検出部位E1は、当該検出部位E1の円弧を提供する円がXY平面と平行に存在するような態様で、形成されている。各検出部位E1は、径方向外側に凸となるように配置されている。
In the first
このような検出部位E1を有する第1変形体141に力ないしモーメントが作用すると、当該検出部位E1は、第1変形体の周方向において圧縮力または引張力を受ける。このため、上述したように、検出部位E1のうちV軸及びW軸と重なる部位が、第1変形体141の径方向に沿って(V軸方向あるいはW軸方向に沿って)変位する。更に、当該部位には、圧縮応力または引張応力が生じる。
When force or moment is applied to the first
一方、図31(a)に示す第1変形体141は、図30に示す第1変形体141と同様に、Z軸方向から見てV軸及びW軸と重なる位置を含む領域が図28に示す検出部位E1で置換されているが、その配置が図30とは異なっている。すなわち、図31(b)に示すように、図31(a)の第1変形体141では、第1象限及び第3象限に配置された検出部位E1は、これらの検出部位E1の円弧を提供する円がWZ平面と平行に存在するような態様で、形成されており、第2象限及び第4象限に配置された検出部位E1は、これらの検出部位E1の円弧を提供する円がVZ平面と平行に存在するような態様で、形成されている。
On the other hand, the first
このような検出部位E1を有する第1変形体141に力ないしモーメントが作用すると、当該検出部位E1は、第1変形体の周方向において圧縮力または引張力を受ける。このため、上述したように、検出部位E1のうちV軸及びW軸と重なる部位が、Z軸方向に沿って(V軸方向あるいはW軸方向に沿って)変位する。更に、当該部位には、圧縮応力または引張応力が生じる。
When force or moment is applied to the first
図32は、容量素子Cが配置された図28の検出部位Eを示す概略図である。容量素子Cは、一例として、図32に示すように、位置Rに変位基板Im(絶縁体)を介して変位電極Emを配置し、この変位電極Emに対向する位置に、固定基板If(絶縁体)を介して、XYZ三次元座標系において移動しない固定電極Efを配置することによって、構成され得る。容量素子Cを有する検出部位Eは、図1に示す基本構造1を利用した力覚センサにおいても、図8に示す環状の基本構造101を利用した力覚センサにおいても、もちろん採用可能である。なお、位置Rは、検出部位Eのうち、当該検出部位Eに作用する力(圧縮力及び引張力)によって最も大きくX軸方向に変位する位置である。このため、位置Rにおいて容量素子Cを構成すれば、最も高感度で作用した力ないしモーメントを計測することができる。
32 is a schematic diagram showing the detection site E of FIG. 28 in which the capacitive element C is arranged. As an example, as shown in FIG. 32, the capacitive element C has a displacement electrode Em disposed at a position R via a displacement substrate Im (insulator), and a fixed substrate If (insulation) at a position facing the displacement electrode Em. The fixed electrode Ef that does not move in the XYZ three-dimensional coordinate system can be arranged via the body). Of course, the detection site E having the capacitive element C can be employed in both the force sensor using the
図32に示す検出部位Eに圧縮力が作用すると、前述したように、位置RはX軸負方向に移動する(図29(a)参照)。このため、変位電極Emと固定電極Efとの離間距離が減少し、容量素子Cの静電容量値は増大する。一方、図32に示す検出部位Eに引張力が作用すると、前述したように、位置RはX軸正方向に移動する(図29(b)参照)。このため、変位電極Emと固定電極Efとの離間距離が増大し、容量素子Cの静電容量値は減少する。結局、図3及び図11に示す力覚センサ1c、101c、並びに、図5及び図20に示す基本構造1w、101wを用いた力覚センサの各検出部位を図28に示す検出部位Eに置換して新たな力覚センサを構成しても、この新たな力覚センサは、置換を行う前の各力覚センサに対して力ないしモーメントが作用した場合と同様の挙動(出力特性)を示すことになる。
When a compressive force is applied to the detection site E shown in FIG. 32, the position R moves in the negative direction of the X axis as described above (see FIG. 29A). For this reason, the distance between the displacement electrode Em and the fixed electrode Ef decreases, and the capacitance value of the capacitive element C increases. On the other hand, when a tensile force acts on the detection site E shown in FIG. 32, the position R moves in the positive direction of the X axis as described above (see FIG. 29B). For this reason, the separation distance between the displacement electrode Em and the fixed electrode Ef increases, and the capacitance value of the capacitive element C decreases. After all, the detection parts of the
図32に示すように、固定基板73が固定部110と同一平面上に配置されていれば、第1変形体141の4つの変位電極Emに対向する固定電極E(4つ)と第2変形体の4つの変位電極Emに対向する固定電極(4つ)との合計8つの固定電極を単一の基板(固定基板73)で構成することができるため、有利である。
As shown in FIG. 32, if the fixed
また、図33は、歪ゲージRが配置された図28の検出部位Eを示す概略図である。歪ゲージは、一例として、位置Rに配置されれば良い。このような検出部位Eは、図1に示す基本構造1に採用することも、図8に示す環状の基本構造101に採用することも、可能である。なお、位置Rは、検出部位Eのうち、当該検出部位Eに作用する力(圧縮力及び引張力)によって最も大きな応力が作用する位置である。このため、位置Rに歪ゲージRを配置すれば、最も高感度で作用した力ないしモーメントを計測することができる。
FIG. 33 is a schematic diagram showing the detection site E of FIG. 28 in which the strain gauge R is arranged. The strain gauge may be disposed at the position R as an example. Such a detection site E can be employed in the
図33に示す検出部位Eに圧縮力が作用すると、前述したように、位置Rには引張応力が作用する(図29(a)参照)。このため、歪みゲージRの電気抵抗値は増大する。一方、図33に示す検出部位Eに引張力が作用すると、前述したように、位置Rは圧縮応力が作用する。(図29(b)参照)。このため、歪みゲージRの電気抵抗値は減少する。結局、図4及び図12に示す力覚センサ1s、101s、並びに、図5及び図20に示す基本構造1w、101wを用いた力覚センサの各検出部位を図28に示す検出部位Eに置換して新たな力覚センサを構成しても、この新たな力覚センサは、置換を行う前の各力覚センサに対して力ないしモーメントが作用した場合と同様の挙動(出力特性)を示すことになる。
When a compressive force is applied to the detection site E shown in FIG. 33, as described above, a tensile stress is applied to the position R (see FIG. 29A). For this reason, the electrical resistance value of the strain gauge R increases. On the other hand, when a tensile force acts on the detection site E shown in FIG. 33, a compressive stress acts on the position R as described above. (See FIG. 29 (b)). For this reason, the electrical resistance value of the strain gauge R decreases. After all, the detection parts of the force sensor using the
<<< §5. 静電容量タイプの力覚センサにおいて、極板間の実効対向面積を一定に保つための工夫 >>>
なお、静電容量タイプの力覚センサにおいては、各軸方向の力ないし各軸まわりのモーメントが作用した結果、固定電極に対する変位電極の相対位置が変化した場合にも、容量素子を構成する一対の電極の実効対向面積が変化しないように、各容量素子を構成する固定電極および変位電極のうちの一方の面積を他方の面積よりも大きく設定することも考えられる。これは、面積が小さい方の電極(例えば変位電極)の輪郭を、面積が大きい方の電極(例えば固定電極)の表面に当該電極の法線方向に投影して正射影投影像を形成した場合、面積が小さい方の電極の投影像が、面積が大きい方の電極の表面内に完全に含まれるような状態である。この状態が維持されれば、両電極によって構成される容量素子の実効面積は、小さい方の電極の面積に等しくなり、常に一定になる。すなわち、力の検出精度を向上させることができる。
<<< §5. A device to keep the effective facing area between electrode plates constant in a capacitance-type force sensor >>>
In the capacitance type force sensor, even when the relative position of the displacement electrode with respect to the fixed electrode changes as a result of the force in each axial direction or the moment around each axis acting, the pair constituting the capacitive element It is also conceivable that one area of the fixed electrode and the displacement electrode constituting each capacitive element is set to be larger than the other area so that the effective opposing area of each electrode does not change. This is a case where an orthographic projection image is formed by projecting the contour of an electrode having a smaller area (for example, a displacement electrode) onto the surface of the electrode having a larger area (for example, a fixed electrode) in the normal direction of the electrode. The projection image of the electrode having the smaller area is completely included in the surface of the electrode having the larger area. If this state is maintained, the effective area of the capacitive element constituted by both electrodes becomes equal to the area of the smaller electrode and is always constant. That is, the force detection accuracy can be improved.
これまでに説明してきた実施の形態のうち、図3に示す力覚センサ1c、図11に示す力覚センサ101s、及び、図19に示す構造においては、それぞれの図面に示されるように、固定電極の面積が変位電極の面積よりも大きく構成されている。
Among the embodiments described so far, the
1 基本構造
1c 静電容量タイプの力覚センサ
1s 歪ゲージタイプの力覚センサ
1w 基本構造
10 固定部
20 可動部
30 変形体
31 第1変形体
31e 第1弾性体
31f 第1固定部側接続部
31m 第1可動部側接続部
32 第2変形体
32e 第2弾性体
32f 第2固定部側接続部
32m 第2可動部側接続部
40 検出回路
61d 第1変位部
61e1、61e2 一対の第1変形部
61f、61m 接続部
62d 第2変位部
62e1、62e2 一対の第2変形部
62f、62m 接続部
71 第1接続部
72 第2接続部
73 固定基板
101 基本構造
101a 基本構造
101b 基本構造
101c 静電容量タイプの力覚センサ
101s 歪ゲージタイプの力覚センサ
101w 基本構造
110 固定部
120 可動部
131 連結体
131l 連結体
132 連結体
132a、132b、132c、132d 連結体
133 連結体
134、134a、134b 連結体
135 連結体
135l 連結体
136、136a、136b 連結体
137 連結体
138、138a、138b 連結体
140 変形体
141 第1変形体
142 第2変形体
142t1、142t2、142t3、142t4 薄肉部
142b、142b1、142b2、142b3、142b4 変形体
150 検出回路
DESCRIPTION OF
Claims (7)
Z軸正方向から見て前記固定体と同心に配置され、Z軸まわりのモーメントの作用により前記固定体に対して相対移動する円環状の受力体と、
一端が前記固定体によって支持され、他端が前記受力体によって支持された弾性変形体と、
前記弾性変形体に配置された変位電極と、前記変位電極に対向する固定電極とを有する容量素子と、
前記容量素子の静電容量値の変動に基づいて、前記受力体に作用したZ軸まわりのモーメントを示す電気信号を出力する検出回路と、
を備え、
前記弾性変形体は、一端および他端を有する円弧状変形体と、前記円弧状変形体の前記一端を前記固定体に連結する第1の連結体と、前記円弧状変形体の前記他端を前記受力体に連結する第2の連結体とを有し、
前記円弧状変形体は、前記第1の連結体よりも肉厚が薄く、かつ前記第2の連結体よりも肉厚が薄く、
前記弾性変形体として、
Z軸方向から見てXY平面の第1象限に配置された第1の弾性変形体と、
Z軸方向から見てXY平面の第2象限に配置された第2の弾性変形体と、
Z軸方向から見てXY平面の第3象限に配置された第3の弾性変形体と、
Z軸方向から見てXY平面の第4象限に配置された第4の弾性変形体と、
を備え、
前記第1の弾性変形体および前記第2の弾性変形体はY軸に関して対称に配置され、
前記第3の弾性変形体および前記第4の弾性変形体はY軸に関して対称に配置され、
前記第1の弾性変形体および前記第4の弾性変形体はX軸に関して対称に配置され、
前記第2の弾性変形体および前記第3の弾性変形体はX軸に関して対称に配置され、
前記第1の弾性変形体の前記第1の連結体、前記第2の弾性変形体の前記第1の連結体、前記第3の弾性変形体の前記第1の連結体、および前記第4の弾性変形体の前記第1の連結体は、Y軸と平行に延在し、かつ
前記第1の弾性変形体の前記第2の連結体、前記第2の弾性変形体の前記第2の連結体、前記第3の弾性変形体の前記第2の連結体、および前記第4の弾性変形体の前記第2の連結体は、X軸と平行に延在していることを特徴とする力覚センサ。 A force sensor for detecting a moment about the Z axis in an XYZ three-dimensional coordinate system, which is fixed on the XY plane and has a fixed body centered on the origin when viewed from the positive direction of the Z axis;
An annular force receiving body arranged concentrically with the fixed body as viewed from the positive direction of the Z axis and moving relative to the fixed body by the action of a moment around the Z axis;
An elastic deformation body having one end supported by the fixed body and the other end supported by the force receiving body;
A capacitive element having a displacement electrode disposed on the elastic deformation body and a fixed electrode facing the displacement electrode;
A detection circuit that outputs an electrical signal indicating a moment around the Z-axis acting on the force receiving member based on a change in capacitance value of the capacitive element;
With
The elastic deformable body includes an arc-shaped deformable body having one end and the other end, a first connecting body that connects the one end of the arc-shaped deformable body to the fixed body, and the other end of the arc-shaped deformable body. A second coupling body coupled to the force receiving body,
The arcuate deformable body, the thin wall thickness than the first connecting member, and the thick than the second coupling body is rather thin,
As the elastic deformation body,
A first elastic deformation body arranged in the first quadrant of the XY plane as viewed from the Z-axis direction;
A second elastic deformation body arranged in the second quadrant of the XY plane as viewed from the Z-axis direction;
A third elastic deformation body arranged in the third quadrant of the XY plane as viewed from the Z-axis direction;
A fourth elastic deformation body disposed in the fourth quadrant of the XY plane as viewed from the Z-axis direction;
With
The first elastic deformation body and the second elastic deformation body are arranged symmetrically with respect to the Y axis,
The third elastic deformation body and the fourth elastic deformation body are arranged symmetrically with respect to the Y axis,
The first elastic deformation body and the fourth elastic deformation body are arranged symmetrically with respect to the X axis,
The second elastic deformation body and the third elastic deformation body are arranged symmetrically with respect to the X axis,
The first connection body of the first elastic deformation body, the first connection body of the second elastic deformation body, the first connection body of the third elastic deformation body, and the fourth connection body. The first connecting body of the elastically deformable body extends parallel to the Y axis; and
The second coupling body of the first elastic deformation body, the second coupling body of the second elastic deformation body, the second coupling body of the third elastic deformation body, and the fourth The force sensor according to claim 2, wherein the second connecting body of the elastically deformable body extends in parallel with the X axis .
前記第2の弾性変形体の前記第2の連結体と前記第3の弾性変形体の前記第2の連結体との間にX軸に沿って延在し、前記固定体と前記受力体を接続する連結体と、
をさらに備えることを特徴とする請求項1に記載の力覚センサ。 The fixed body and the force receiving body extend along the X axis between the second coupling body of the first elastic deformation body and the second coupling body of the fourth elastic deformation body. A connecting body for connecting,
The fixed body and the force receiving body extend along the X axis between the second coupling body of the second elastic deformation body and the second coupling body of the third elastic deformation body. A connecting body for connecting,
The force sensor according to claim 1 , further comprising:
Z軸正方向から見て前記固定体と同心に配置され、Z軸まわりのモーメントの作用により前記固定体に対して相対移動する円環状の受力体と、An annular force receiving body arranged concentrically with the fixed body as viewed from the positive direction of the Z axis and moving relative to the fixed body by the action of a moment around the Z axis;
一端が前記固定体によって支持され、他端が前記受力体によって支持された弾性変形体と、An elastic deformation body having one end supported by the fixed body and the other end supported by the force receiving body;
前記弾性変形体に配置された変位電極と、前記変位電極に対向する固定電極とを有する容量素子と、A capacitive element having a displacement electrode disposed on the elastic deformation body and a fixed electrode facing the displacement electrode;
前記容量素子の静電容量値の変動に基づいて、前記受力体に作用したZ軸まわりのモーメントを示す電気信号を出力する検出回路と、A detection circuit that outputs an electrical signal indicating a moment around the Z-axis acting on the force receiving member based on a change in capacitance value of the capacitive element;
を備え、With
前記弾性変形体は、一端および他端を有する円弧状変形体と、前記円弧状変形体の前記一端を前記固定体に連結する第1の連結体と、前記円弧状変形体の前記他端を前記受力体に連結する第2の連結体とを有し、The elastic deformable body includes an arc-shaped deformable body having one end and the other end, a first connecting body that connects the one end of the arc-shaped deformable body to the fixed body, and the other end of the arc-shaped deformable body. A second coupling body coupled to the force receiving body,
前記円弧状変形体は、前記第1の連結体よりも肉厚が薄く、かつ前記第2の連結体よりも肉厚が薄く、The arcuate deformed body is thinner than the first connected body and thinner than the second connected body,
前記弾性変形体として、As the elastic deformation body,
Z軸方向から見てXY平面の第1象限に配置された第1の弾性変形体と、A first elastic deformation body arranged in the first quadrant of the XY plane as viewed from the Z-axis direction;
Z軸方向から見てXY平面の第2象限に配置された第2の弾性変形体と、A second elastic deformation body arranged in the second quadrant of the XY plane as viewed from the Z-axis direction;
Z軸方向から見てXY平面の第3象限に配置された第3の弾性変形体と、A third elastic deformation body arranged in the third quadrant of the XY plane as viewed from the Z-axis direction;
Z軸方向から見てXY平面の第4象限に配置された第4の弾性変形体と、A fourth elastic deformation body arranged in the fourth quadrant of the XY plane as viewed from the Z-axis direction;
を備え、With
前記第1の弾性変形体および前記第2の弾性変形体はY軸に関して対称に配置され、The first elastic deformation body and the second elastic deformation body are arranged symmetrically with respect to the Y axis,
前記第3の弾性変形体および前記第4の弾性変形体はY軸に関して対称に配置され、The third elastic deformation body and the fourth elastic deformation body are arranged symmetrically with respect to the Y axis,
前記第1の弾性変形体および前記第4の弾性変形体はX軸に関して対称に配置され、The first elastic deformation body and the fourth elastic deformation body are arranged symmetrically with respect to the X axis,
前記第2の弾性変形体および前記第3の弾性変形体はX軸に関して対称に配置され、The second elastic deformation body and the third elastic deformation body are arranged symmetrically with respect to the X axis,
前記第1の弾性変形体の前記第2の連結体と前記第4の弾性変形体の前記第2の連結体との間にX軸に沿って延在し、前記固定体と前記受力体を接続する連結体と、The fixed body and the force receiving body extend along the X axis between the second coupling body of the first elastic deformation body and the second coupling body of the fourth elastic deformation body. A connecting body for connecting,
前記第2の弾性変形体の前記第2の連結体と前記第3の弾性変形体の前記第2の連結体との間にX軸に沿って延在し、前記固定体と前記受力体を接続する連結体と、The fixed body and the force receiving body extend along the X axis between the second coupling body of the second elastic deformation body and the second coupling body of the third elastic deformation body. A connecting body for connecting,
をさらに備えることを特徴とする力覚センサ。A force sensor further comprising:
前記第1の弾性変形体の前記第2の連結体、前記第2の弾性変形体の前記第2の連結体、前記第3の弾性変形体の前記第2の連結体、および前記第4の弾性変形体の前記第2の連結体は、X軸と平行に延在していることを特徴とする請求項3に記載の力覚センサ。The second coupling body of the first elastic deformation body, the second coupling body of the second elastic deformation body, the second coupling body of the third elastic deformation body, and the fourth The force sensor according to claim 3, wherein the second connecting body of the elastically deformable body extends in parallel with the X axis.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017027055A JP6600824B2 (en) | 2017-02-16 | 2017-02-16 | Force sensor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017027055A JP6600824B2 (en) | 2017-02-16 | 2017-02-16 | Force sensor |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019152693A Division JP6644307B2 (en) | 2019-08-23 | 2019-08-23 | Force sensor |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2018132442A JP2018132442A (en) | 2018-08-23 |
| JP2018132442A5 JP2018132442A5 (en) | 2019-08-08 |
| JP6600824B2 true JP6600824B2 (en) | 2019-11-06 |
Family
ID=63248353
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017027055A Active JP6600824B2 (en) | 2017-02-16 | 2017-02-16 | Force sensor |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6600824B2 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021004903A (en) * | 2020-09-18 | 2021-01-14 | 株式会社トライフォース・マネジメント | Force sensor |
| JP2021120687A (en) * | 2020-10-16 | 2021-08-19 | 株式会社トライフォース・マネジメント | Force sensor |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112798151A (en) * | 2021-01-26 | 2021-05-14 | 松诺盟科技有限公司 | Torque sensor arm structure and torque sensor |
| JP7308548B2 (en) | 2021-02-18 | 2023-07-14 | 株式会社トライフォース・マネジメント | torque sensor |
| US20230152172A1 (en) * | 2021-02-18 | 2023-05-18 | Tri-Force Management Corporation | Torque sensor |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59103126A (en) * | 1982-10-11 | 1984-06-14 | Fujitsu Ltd | Card image processing data processor having retrieving function |
| DE20209850U1 (en) * | 2002-06-25 | 2002-09-19 | Wille Gmbh & Co | Torque sensor with bars |
| JP4907050B2 (en) * | 2003-03-31 | 2012-03-28 | 株式会社ワコー | Force detection device |
| JP5568768B2 (en) * | 2003-03-31 | 2014-08-13 | 株式会社トライフォース・マネジメント | Force detection device |
| WO2007096322A2 (en) * | 2006-02-23 | 2007-08-30 | Abb Ab | A system for controlling the position and orientation of an object in dependence on received forces and torques from a user |
| JP4948630B2 (en) * | 2010-08-05 | 2012-06-06 | 株式会社トライフォース・マネジメント | Torque sensor |
| WO2013014803A1 (en) * | 2011-07-27 | 2013-01-31 | 株式会社トライフォース・マネジメント | Dynamic sensor |
| JP5667723B1 (en) * | 2014-08-15 | 2015-02-12 | 株式会社ワコーテック | Force sensor |
| JP5687384B1 (en) * | 2014-09-29 | 2015-03-18 | 株式会社ワコーテック | Force sensor |
| WO2016121129A1 (en) * | 2015-01-26 | 2016-08-04 | 株式会社ワコーテック | Force sensor |
| JP6092326B2 (en) * | 2015-07-29 | 2017-03-08 | 株式会社トライフォース・マネジメント | Torque sensor |
| US10557766B2 (en) * | 2016-07-20 | 2020-02-11 | Tri-Force Management Corporation | Torque sensor for detecting occurrence of metal fatigue in an elastic body |
| JP6214072B1 (en) * | 2016-08-09 | 2017-10-18 | 株式会社トライフォース・マネジメント | Force sensor |
-
2017
- 2017-02-16 JP JP2017027055A patent/JP6600824B2/en active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021004903A (en) * | 2020-09-18 | 2021-01-14 | 株式会社トライフォース・マネジメント | Force sensor |
| JP2021120687A (en) * | 2020-10-16 | 2021-08-19 | 株式会社トライフォース・マネジメント | Force sensor |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2018132442A (en) | 2018-08-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6600824B2 (en) | Force sensor | |
| JP6214072B1 (en) | Force sensor | |
| JP6308605B1 (en) | Force sensor | |
| WO2018029790A1 (en) | Force sensor | |
| CN108291850B (en) | Torque sensor | |
| JP6710404B2 (en) | Force sensor | |
| JP6644307B2 (en) | Force sensor | |
| JP6685568B2 (en) | Force sensor | |
| JP6404514B2 (en) | Force sensor | |
| JP6241982B1 (en) | Force sensor | |
| JP6494056B2 (en) | Force sensor | |
| JP6552026B2 (en) | Force sensor | |
| JP6784432B1 (en) | Force sensor | |
| JP7055501B2 (en) | Force sensor | |
| JP6804122B2 (en) | Force sensor | |
| JP7105518B2 (en) | force sensor | |
| JP6896309B2 (en) | Force sensor | |
| JP6685528B2 (en) | Force sensor | |
| JP7007002B2 (en) | Force sensor | |
| JP6771797B2 (en) | Force sensor | |
| JP6893717B2 (en) | Force sensor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190626 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190626 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20190626 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190705 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20190708 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190719 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190729 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190809 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190909 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6600824 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |