JP6678505B2 - 撮像装置及びその制御方法、プログラム並びに記憶媒体 - Google Patents
撮像装置及びその制御方法、プログラム並びに記憶媒体 Download PDFInfo
- Publication number
- JP6678505B2 JP6678505B2 JP2016086576A JP2016086576A JP6678505B2 JP 6678505 B2 JP6678505 B2 JP 6678505B2 JP 2016086576 A JP2016086576 A JP 2016086576A JP 2016086576 A JP2016086576 A JP 2016086576A JP 6678505 B2 JP6678505 B2 JP 6678505B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- image
- area
- read
- photoelectric conversion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003384 imaging method Methods 0.000 title claims description 49
- 238000000034 method Methods 0.000 title claims description 30
- 238000001514 detection method Methods 0.000 claims description 74
- 238000006243 chemical reaction Methods 0.000 claims description 31
- 238000004364 calculation method Methods 0.000 claims description 3
- 238000004590 computer program Methods 0.000 claims 1
- 238000011156 evaluation Methods 0.000 description 30
- 238000012545 processing Methods 0.000 description 28
- 230000003287 optical effect Effects 0.000 description 26
- 238000012546 transfer Methods 0.000 description 22
- 239000003990 capacitor Substances 0.000 description 16
- 210000001747 pupil Anatomy 0.000 description 15
- 230000008569 process Effects 0.000 description 14
- 238000005259 measurement Methods 0.000 description 12
- 238000010586 diagram Methods 0.000 description 11
- 230000006870 function Effects 0.000 description 6
- 239000002131 composite material Substances 0.000 description 3
- 230000004907 flux Effects 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 238000009792 diffusion process Methods 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000001960 triggered effect Effects 0.000 description 2
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000001454 recorded image Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
Images










Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
- H04N23/673—Focus control based on electronic image sensor signals based on contrast or high frequency components of image signals, e.g. hill climbing method
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/703—SSIS architectures incorporating pixels for producing signals other than image signals
- H04N25/704—Pixels specially adapted for focusing, e.g. phase difference pixel sets
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/71—Charge-coupled device [CCD] sensors; Charge-transfer registers specially adapted for CCD sensors
- H04N25/75—Circuitry for providing, modifying or processing image signals from the pixel array
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/70—SSIS architectures; Circuits associated therewith
- H04N25/76—Addressed sensors, e.g. MOS or CMOS sensors
- H04N25/78—Readout circuits for addressed sensors, e.g. output amplifiers or A/D converters
Description
本実施形態では、撮像装置を、コントラスト方式及び位相差方式のオートフォーカス(AF)機能並びに被写体検出機能(主被写体追尾機能)を有するデジタルビデオカメラにより実現した例について説明するが、携帯電話の一種であるスマートフォンやタブレット端末などの電子機器にも適用可能である。
以下に、図1を参照して、本実施形態の撮像装置100の構成について説明する。
図2は撮像素子3の画素配置を示す模式図である。単位画素200が行列状に配列されており、各単位画素200に対してR(Red)/G(Green)/B(Blue)のカラーフィルタがベイヤー状に配置されている。また、各単位画素200内にはそれぞれ副画素a、副画素bが配置されており、フォトダイオード(以下、PD)201a、201bがそれぞれの副画素a、bに配置されている。副画素a、bから出力される各々の撮像信号は焦点検出に利用され、副画素a、副画素bから出力される撮像信号を加算した信号であるa/b合成信号は画像生成用に利用される。
次に、上述した構成を有する撮像装置100による画像撮影時の動作について説明する。

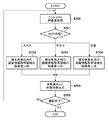
次に、図7を参照して、撮影動作におけるAF制御時に、信号読み出し制御部4が、AF制御部8により制御され、撮像素子3を駆動して画像信号を読み出す場合の被写体検出用の距離情報取得領域の設定処理について説明する。
本発明は、上述の実施形態の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
Claims (9)
- 複数のマイクロレンズを有し、当該複数のマイクロレンズそれぞれに複数の光電変換部が割り当てられて、当該複数の光電変換部ごとに1つの画素をなす撮像素子と、
前記撮像素子の光電変換部から順次信号を読み出し、前記撮像素子の各画素における複数の光電変換部からの信号に対応する複数画素からなる画像信号を複数フレーム出力させる読み出し手段と、
主被写体に対応する領域を示す情報と、該主被写体の合焦状態を示す情報とを取得する取得手段と、
前記読み出し手段により前記撮像素子から視差が異なる信号を読み出す領域を設定する設定手段と、を有し、
前記設定手段は、各フレームにおける前記視差が異なる信号を読み出す領域を、前記視差が異なる信号を読み出す領域が包含する画角を略同等に維持しつつ、
前記取得手段により取得する前記主被写体の合焦状態が第1の状態であるときに、前記第1の状態よりも合焦に遠い第2の状態であるときよりも高い解像度で前記視差が異なる信号を読み出す領域を設定することを特徴とする撮像装置。 - 複数のマイクロレンズを有し、当該複数のマイクロレンズそれぞれに複数の光電変換部が割り当てられて、当該複数の光電変換部ごとに1つの画素をなす撮像素子と、
前記撮像素子の光電変換部から順次信号を読み出し、前記撮像素子の各画素における複数の光電変換部からの信号に対応する複数画素からなる画像信号を複数フレーム出力させる読み出し手段と、
前記画像信号に基づいて前記画像信号における被写体の数を検出する検出手段と、
前記読み出し手段により前記撮像素子から視差が異なる信号を読み出す領域を設定する設定手段と、を有し、
前記設定手段は、各フレームにおける前記視差が異なる信号を読み出す領域を、前記視差が異なる信号を読み出す領域が包含する画角を略同等に維持しつつ、
前記検出手段により検出される被写体の数が第1の数であるときに、前記第1の数より少ない第2の数であるときよりも高い解像度で前記視差が異なる信号を読み出す領域を設定することを特徴とする撮像装置。 - 前記設定手段により設定された前記視差が異なる信号を読み出す領域から読み出された信号を用いて深さ情報を算出する算出手段を有することを特徴とする請求項1または2に記載の撮像装置。
- 前記設定手段により設定された前記視差が異なる信号を読み出す領域から読み出された信号を用いて深さ情報を算出する算出手段を有し、
前記取得手段は、前記深さ情報に基づいて得られた被写体の合焦状態を示す情報を取得することを特徴とする請求項1に記載の撮像装置。 - 前記設定手段により設定された前記視差が異なる信号を読み出す領域から読み出された信号を用いて深さ情報を算出する算出手段を有し、
前記検出手段は、前記深さ情報に基づいて被写体の位置と大きさと数を検出することを特徴とする請求項2に記載の撮像装置。 - 複数のマイクロレンズを有し、当該複数のマイクロレンズそれぞれに複数の光電変換部が割り当てられて、当該複数の光電変換部ごとに1つの画素をなす撮像素子と、
前記撮像素子の光電変換部から順次信号を読み出し、前記撮像素子の各画素における複数の光電変換部からの信号に対応する複数画素からなる画像信号を複数フレーム出力させる読み出し手段と、を有する撮像装置の制御方法であって、
主被写体に対応する領域を示す情報と、該主被写体の合焦状態を示す情報とを取得する取得工程と、
前記読み出し手段により前記撮像素子から視差が異なる信号を読み出す領域を設定する設定工程と、を有し、
前記設定工程では、各フレームにおける前記視差が異なる信号を読み出す領域を、前記視差が異なる信号を読み出す領域が包含する画角を略同等に維持しつつ、
前記取得工程により取得する前記主被写体の合焦状態が第1の状態であるときに、前記第1の状態よりも合焦に遠い第2の状態であるときよりも高い解像度で前記視差が異なる信号を読み出す領域を設定することを特徴とする撮像装置の制御方法。 - 複数のマイクロレンズを有し、当該複数のマイクロレンズそれぞれに複数の光電変換部が割り当てられて、当該複数の光電変換部ごとに1つの画素をなす撮像素子と、
前記撮像素子の光電変換部から順次信号を読み出し、前記撮像素子の各画素における複数の光電変換部からの信号に対応する複数画素からなる画像信号を複数フレーム出力させる読み出し手段と、を有する撮像装置の制御方法であって、
前記画像信号に基づいて前記画像信号における被写体の数を検出する検出工程と、
前記読み出し手段により前記撮像素子から視差が異なる信号を読み出す領域を設定する設定工程と、を有し、
前記設定工程では、各フレームにおける前記視差が異なる信号を読み出す領域を、前記視差が異なる信号を読み出す領域が包含する画角を略同等に維持しつつ、
前記検出工程により検出される被写体の数が第1の数であるときに、前記第1の数より少ない第2の数であるときよりも高い解像度で前記視差が異なる信号を読み出す領域を設定することを特徴とする撮像装置の制御方法。 - 請求項6または7に記載された制御方法を、撮像装置のコンピュータに実行させるためのプログラム。
- 請求項6または7に記載された制御方法を、撮像装置のコンピュータに実行させるためのプログラムを記憶したコンピュータによる読み取りが可能な記憶媒体。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016086576A JP6678505B2 (ja) | 2016-04-22 | 2016-04-22 | 撮像装置及びその制御方法、プログラム並びに記憶媒体 |
| US15/486,851 US10205870B2 (en) | 2016-04-22 | 2017-04-13 | Image capturing apparatus and control method thereof |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016086576A JP6678505B2 (ja) | 2016-04-22 | 2016-04-22 | 撮像装置及びその制御方法、プログラム並びに記憶媒体 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017194656A JP2017194656A (ja) | 2017-10-26 |
| JP2017194656A5 JP2017194656A5 (ja) | 2019-05-30 |
| JP6678505B2 true JP6678505B2 (ja) | 2020-04-08 |
Family
ID=60090455
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016086576A Active JP6678505B2 (ja) | 2016-04-22 | 2016-04-22 | 撮像装置及びその制御方法、プログラム並びに記憶媒体 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10205870B2 (ja) |
| JP (1) | JP6678505B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020158102A1 (ja) * | 2019-01-30 | 2020-08-06 | 富士フイルム株式会社 | 顔領域検出装置、撮像装置、顔領域検出方法、及び顔領域検出プログラム |
| KR20220140925A (ko) | 2021-04-09 | 2022-10-19 | 삼성전자주식회사 | 이미지 센서 |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4835270B2 (ja) | 2006-06-03 | 2011-12-14 | 株式会社ニコン | 固体撮像素子及びこれを用いた撮像装置 |
| JP5478935B2 (ja) * | 2009-05-12 | 2014-04-23 | キヤノン株式会社 | 撮像装置 |
| JP5778931B2 (ja) | 2011-01-25 | 2015-09-16 | キヤノン株式会社 | 撮像装置及びその制御方法 |
| JP6214271B2 (ja) | 2012-09-12 | 2017-10-18 | キヤノン株式会社 | 距離検出装置、撮像装置、距離検出方法、プログラム及び記録媒体 |
-
2016
- 2016-04-22 JP JP2016086576A patent/JP6678505B2/ja active Active
-
2017
- 2017-04-13 US US15/486,851 patent/US10205870B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20170310877A1 (en) | 2017-10-26 |
| JP2017194656A (ja) | 2017-10-26 |
| US10205870B2 (en) | 2019-02-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5468177B2 (ja) | 撮像装置及びその合焦制御方法 | |
| JP6765860B2 (ja) | 撮像素子、撮像装置、および撮像信号処理方法 | |
| JP6678504B2 (ja) | 撮像装置及びその制御方法、プログラム並びに記憶媒体 | |
| CN109314742B (zh) | 用于光圈模拟的方法、装置、设备及存储媒体 | |
| JP5850680B2 (ja) | 撮像装置及びその制御方法 | |
| JP5946421B2 (ja) | 撮像装置及びその制御方法 | |
| US9338346B2 (en) | Focus detection apparatus, control method therefor, and image capture apparatus | |
| US20140071318A1 (en) | Imaging apparatus | |
| JP6351231B2 (ja) | 撮像装置、撮像システム、撮像装置の制御方法、プログラム、および、記憶媒体 | |
| JP2016001807A (ja) | 画像処理装置、それを備えた撮像装置、画像処理方法、及び画像処理プログラム | |
| JP2015018205A (ja) | 焦点検出装置及び方法、及び撮像装置 | |
| JP2013235054A (ja) | 焦点検出装置及び撮像装置 | |
| KR20150064604A (ko) | 촬영 장치 및 이의 제어 방법 | |
| JP5657184B2 (ja) | 撮像装置及び信号処理方法 | |
| KR20170067634A (ko) | 촬영 장치 및 촬영 장치를 이용한 초점 검출 방법 | |
| US10225494B2 (en) | Image capturing apparatus and control method thereof | |
| JP6381274B2 (ja) | 撮像装置、その制御方法、および制御プログラム | |
| US10182186B2 (en) | Image capturing apparatus and control method thereof | |
| US9883096B2 (en) | Focus detection apparatus and control method thereof | |
| JP6678505B2 (ja) | 撮像装置及びその制御方法、プログラム並びに記憶媒体 | |
| US9736354B2 (en) | Control apparatus, image pickup apparatus, control method, and storage medium | |
| JP2017216649A (ja) | 撮像素子、撮像装置、および撮像信号処理方法 | |
| JP6594048B2 (ja) | 撮像装置及びその制御方法 | |
| US20180020150A1 (en) | Control apparatus, image capturing apparatus, control method, and storage medium | |
| BR102015009321B1 (pt) | Aparelho de captura de imagem e método para controlar o mesmo |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190417 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190417 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190719 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190717 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190917 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200217 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200317 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6678505 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |