JP6676643B2 - 手術中に腹腔鏡を保持し移動させる為のデバイス - Google Patents
手術中に腹腔鏡を保持し移動させる為のデバイス Download PDFInfo
- Publication number
- JP6676643B2 JP6676643B2 JP2017536851A JP2017536851A JP6676643B2 JP 6676643 B2 JP6676643 B2 JP 6676643B2 JP 2017536851 A JP2017536851 A JP 2017536851A JP 2017536851 A JP2017536851 A JP 2017536851A JP 6676643 B2 JP6676643 B2 JP 6676643B2
- Authority
- JP
- Japan
- Prior art keywords
- unit
- rotation
- housing part
- housing
- main body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001356 surgical procedure Methods 0.000 title claims description 12
- 230000008878 coupling Effects 0.000 claims description 4
- 238000010168 coupling process Methods 0.000 claims description 4
- 238000005859 coupling reaction Methods 0.000 claims description 4
- 239000002184 metal Substances 0.000 claims description 3
- 239000012530 fluid Substances 0.000 claims description 2
- 239000000725 suspension Substances 0.000 description 9
- 230000008901 benefit Effects 0.000 description 8
- 230000006378 damage Effects 0.000 description 8
- 230000008859 change Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 238000000034 method Methods 0.000 description 5
- 208000027418 Wounds and injury Diseases 0.000 description 4
- 208000014674 injury Diseases 0.000 description 4
- 210000003815 abdominal wall Anatomy 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 238000004091 panning Methods 0.000 description 3
- 230000001360 synchronised effect Effects 0.000 description 3
- 210000000683 abdominal cavity Anatomy 0.000 description 2
- 230000004308 accommodation Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 238000003860 storage Methods 0.000 description 2
- 244000261422 Lysimachia clethroides Species 0.000 description 1
- 210000003484 anatomy Anatomy 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000009365 direct transmission Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000008571 general function Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000000746 purification Methods 0.000 description 1
- 230000008707 rearrangement Effects 0.000 description 1
- 238000010008 shearing Methods 0.000 description 1
Images







Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/32—Surgical cutting instruments
- A61B17/320016—Endoscopic cutting instruments, e.g. arthroscopes, resectoscopes
- A61B17/32002—Endoscopic cutting instruments, e.g. arthroscopes, resectoscopes with continuously rotating, oscillating or reciprocating cutting instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws or setting implements
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers, e.g. stabilisers comprising fluid filler in an implant
- A61B17/7074—Tools specially adapted for spinal fixation operations other than for bone removal or filler handling
- A61B17/7083—Tools for guidance or insertion of tethers, rod-to-anchor connectors, rod-to-rod connectors, or longitudinal elements
- A61B17/7085—Tools for guidance or insertion of tethers, rod-to-anchor connectors, rod-to-rod connectors, or longitudinal elements for insertion of a longitudinal element down one or more hollow screw or hook extensions, i.e. at least a part of the element within an extension has a component of movement parallel to the extension's axis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00017—Electrical control of surgical instruments
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B2017/00367—Details of actuation of instruments, e.g. relations between pushing buttons, or the like, and activation of the tool, working tip, or the like
- A61B2017/00389—Button or wheel for performing multiple functions, e.g. rotation of shaft and end effector
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B2034/302—Surgical robots specifically adapted for manipulations within body cavities, e.g. within abdominal or thoracic cavities
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M2025/0004—Catheters; Hollow probes having two or more concentrically arranged tubes for forming a concentric catheter system
- A61M2025/0006—Catheters; Hollow probes having two or more concentrically arranged tubes for forming a concentric catheter system which can be secured against axial movement, e.g. by using a locking cuff
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Molecular Biology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Robotics (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Pathology (AREA)
- Neurology (AREA)
- Endoscopes (AREA)
- Accommodation For Nursing Or Treatment Tables (AREA)
- Surgical Instruments (AREA)
Description
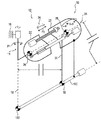
12 メインボディ
14 固定ユニット
16 保持アーム
18 第3の回転軸
20及び22 ハウジング部
24、34及び90 駆動ユニット
26及び28 回転ユニット
30 レバー
32 収容ユニット
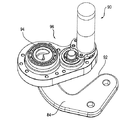
40 ハウジング
42 ベローズ
44及び46 シャフト
48及び50 直線ガイド
52及び54 ボールブッシュ
56及び58 円形ガイド
60、64及び92 モータ
62 スピンドル
63 スピンドルナット
65 凹部
66 ギヤホイール配置
68 垂直シャフト
70及び72 シャフト
74及び78 ウォーム
76及び80 ウォームギヤ
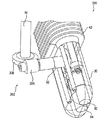
82及び84 セクション
86 ハウジング
94 シャフト
96 ギヤホイール配置
100 腹腔鏡
102 トロカールポイント
104 患者サポート面
106 患者
202 メインボディ
302 固定ユニット
304 ウォーム
306 ウォームギヤ
P1、P2及びP3 方向
Claims (18)
- 手術中に腹腔鏡(100)を保持し移動させる為のデバイス(10、200及び300)に於いて、
保持アーム(16)に前記デバイス(10、200及び300)を固定する為の固定ユニット(14及び302)と、
前記腹腔鏡(100)を保持する為の収容ユニット(32)と、
メインボディ(12及び202)と、
自身を介し前記収容ユニット(32)が前記メインボディ(12及び202)に固定されるレバー(30)と、
を備え、
前記メインボディ(12及び202)は、第1の回転ユニット(26)を通じ第1の回転軸廻りに回転可能に前記固定ユニット(14及び302)に取り付けられ、
前記レバー(30)は、第2の回転ユニット(28)を通じ第2の回転軸廻りに回転可能に前記メインボディ(12及び202)に取り付けられ、
第1の駆動ユニット(34)が提供され、前記第1の駆動ユニット(34)は、活性化された時に、前記メインボディ(12及び202)が前記第1の回転軸廻りに回転されると共に前記レバー(30)が前記第2の回転軸に対し同一の回転角度によって反対の回転方向に回転される様に、前記第1の回転ユニット(26)と前記第2の回転ユニット(28)を駆動し、
前記第1の駆動ユニット(34)は、前記第1の回転ユニット(26)と前記第2の回転ユニット(28)とを駆動する1つのモータ(64)を含み、
前記第1の駆動ユニット(34)は、前記モータ(64)を通じ駆動され、テレスコピックな垂直シャフト(68)を含み、前記垂直シャフト(68)は、前記第1の回転ユニット(26)と前記第2の回転ユニット(28)とを駆動する
事を特徴とするデバイス(10、200及び300)。 - 前記第1の回転ユニット(26)は、前記固定ユニット(14及び302)が回転可能に固定される様に取り付けられた第1のシャフト(44)を含み、前記第2の回転ユニット(28)は、前記レバー(30)が回転可能に固定される様に取り付けられた第2のシャフト(46)を含み、前記第1のシャフト(44)と前記第2のシャフト(46)は、前記第1の駆動ユニット(34)を通じ同一の回転角度によって反対の回転方向に回転される
請求項1に記載のデバイス(10、200及び300)。 - 前記垂直シャフト(68)は、前記第1の回転ユニット(26)の前記第1のシャフト(44)に係合する第1のウォームギヤホイール配置(74及び76)又はベベルギヤホイール配置を通じ係合され、前記垂直シャフト(68)は、前記第2の回転ユニット(28)の前記第2のシャフト(46)に係合する第2のウォームギヤホイール配置(78及び80)又はベベルギヤホイール配置を通じ係合される
請求項2に記載のデバイス(10、200及び300)。 - 前記モータ(64)は、チェーン駆動及び/又はベルト駆動及び/又は流体継手を通じ前記第1の回転ユニット(26)と前記第2の回転ユニット(28)とを駆動する
請求項1乃至3の何れか一項に記載のデバイス(10、200及び300)。 - 前記収容ユニット(32)は、前記腹腔鏡(100)が前記収容ユニット(32)を通じ前記レバー(30)上に於いて自由に回転する事が出来る様に設計される
請求項1乃至4の何れか一項に記載のデバイス(10、200及び300)。 - 前記メインボディ(12及び202)は、第1のハウジング部(20)と、前記第1のハウジング部(20)と別の第2のハウジング部(22)と、を含むハウジング(40)を含み、前記第1の回転ユニット(26)は、前記第1のハウジング部(20)に取り付けられ、前記第2の回転ユニット(28)は、前記第2のハウジング部(22)に取り付けられる
請求項1乃至5の何れか一項に記載のデバイス(10、200及び300)。 - 手術中に腹腔鏡(100)を保持し移動させる為のデバイス(10、200及び300)に於いて、
保持アーム(16)に前記デバイス(10、200及び300)を固定する為の固定ユニット(14及び302)と、
前記腹腔鏡(100)を保持する為の収容ユニット(32)と、
メインボディ(12及び202)と、
自身を介し前記収容ユニット(32)が前記メインボディ(12及び202)に固定されるレバー(30)と、
を備え、
前記メインボディ(12及び202)は、第1の回転ユニット(26)を通じ第1の回転軸廻りに回転可能に前記固定ユニット(14及び302)に取り付けられ、
前記レバー(30)は、第2の回転ユニット(28)を通じ第2の回転軸廻りに回転可能に前記メインボディ(12及び202)に取り付けられ、
第1の駆動ユニット(34)が提供され、前記第1の駆動ユニット(34)は、活性化された時に、前記メインボディ(12及び202)が前記第1の回転軸廻りに回転されると共に前記レバー(30)が前記第2の回転軸に対し同一の回転角度によって反対の回転方向に回転される様に、前記第1の回転ユニット(26)と前記第2の回転ユニット(28)を駆動し、
前記メインボディ(12及び202)は、第1のハウジング部(20)と、前記第1のハウジング部(20)と別の第2のハウジング部(22)と、を含むハウジング(40)を含み、前記第1の回転ユニット(26)は、前記第1のハウジング部(20)に取り付けられ、前記第2の回転ユニット(28)は、前記第2のハウジング部(22)に取り付けられ、
第2の駆動ユニット(24)が提供され、前記第2の駆動ユニット(24)の支援によって前記第2のハウジング部(22)を前記第1のハウジング部(20)に対し所定の距離に亘り直線的に移動させる事が出来る
事を特徴とするデバイス(10、200及び300)。 - 前記第2の駆動ユニット(24)は、モータ(60)と、前記モータ(60)によって駆動されるスピンドルナット(63)を含み、前記第1のハウジング部(20)と前記第2のハウジング部(22)は、前記スピンドルナット(63)に案内されたスピンドル(62)を通じ相互に連結される
請求項7に記載のデバイス(10、200及び300)。 - 前記第1のハウジング部(20)と前記第2のハウジング部(22)は、少なくとも1つの直線ガイド(48及び50)を通じ相互に接続される
請求項7又は8に記載のデバイス(10、200及び300)。 - 手術中に腹腔鏡(100)を保持し移動させる為のデバイス(10、200及び300)に於いて、
保持アーム(16)に前記デバイス(10、200及び300)を固定する為の固定ユニット(14及び302)と、
前記腹腔鏡(100)を保持する為の収容ユニット(32)と、
メインボディ(12及び202)と、
自身を介し前記収容ユニット(32)が前記メインボディ(12及び202)に固定されるレバー(30)と、
を備え、
前記メインボディ(12及び202)は、第1の回転ユニット(26)を通じ第1の回転軸廻りに回転可能に前記固定ユニット(14及び302)に取り付けられ、
前記レバー(30)は、第2の回転ユニット(28)を通じ第2の回転軸廻りに回転可能に前記メインボディ(12及び202)に取り付けられ、
第1の駆動ユニット(34)が提供され、前記第1の駆動ユニット(34)は、活性化された時に、前記メインボディ(12及び202)が前記第1の回転軸廻りに回転されると共に前記レバー(30)が前記第2の回転軸に対し同一の回転角度によって反対の回転方向に回転される様に、前記第1の回転ユニット(26)と前記第2の回転ユニット(28)を駆動し、
前記メインボディ(12及び202)は、第1のハウジング部(20)と、前記第1のハウジング部(20)と別の第2のハウジング部(22)と、を含むハウジング(40)を含み、前記第1の回転ユニット(26)は、前記第1のハウジング部(20)に取り付けられ、前記第2の回転ユニット(28)は、前記第2のハウジング部(22)に取り付けられ、
前記ハウジング(40)は、前記第1のハウジング部(20)と前記第2のハウジング部(22)との間に配置された折り畳み可能なベローズ(42)及び/又はテレスコピックなシートメタルカバーを含む
事を特徴とするデバイス(10、200及び300)。 - 手術中に腹腔鏡(100)を保持し移動させる為のデバイス(10、200及び300)に於いて、
保持アーム(16)に前記デバイス(10、200及び300)を固定する為の固定ユニット(14及び302)と、
前記腹腔鏡(100)を保持する為の収容ユニット(32)と、
メインボディ(12及び202)と、
自身を介し前記収容ユニット(32)が前記メインボディ(12及び202)に固定されるレバー(30)と、
を備え、
前記メインボディ(12及び202)は、第1の回転ユニット(26)を通じ第1の回転軸廻りに回転可能に前記固定ユニット(14及び302)に取り付けられ、
前記レバー(30)は、第2の回転ユニット(28)を通じ第2の回転軸廻りに回転可能に前記メインボディ(12及び202)に取り付けられ、
第1の駆動ユニット(34)が提供され、前記第1の駆動ユニット(34)は、活性化された時に、前記メインボディ(12及び202)が前記第1の回転軸廻りに回転されると共に前記レバー(30)が前記第2の回転軸に対し同一の回転角度によって反対の回転方向に回転される様に、前記第1の回転ユニット(26)と前記第2の回転ユニット(28)を駆動し、
前記メインボディ(12及び202)は、第1のハウジング部(20)と、前記第1のハウジング部(20)と別の第2のハウジング部(22)と、を含むハウジング(40)を含み、前記第1の回転ユニット(26)は、前記第1のハウジング部(20)に取り付けられ、前記第2の回転ユニット(28)は、前記第2のハウジング部(22)に取り付けられ、
前記第1のハウジング部(20)は、前記第2のハウジング部(22)に少なくとも部分的にシフトする事が出来るか、又は前記第2のハウジング部(22)は、前記第1のハウジング部(20)に少なくとも部分的にシフトする事が出来る
事を特徴とするデバイス(10、200及び300)。 - 前記第1の駆動ユニット(34)、前記第2の駆動ユニット(24)、前記第1の回転ユニット(26)、及び/又は前記第2の回転ユニット(28)は、夫々、少なくとも部分的に、好ましくは、完全に前記ハウジング(40)内に配置される
請求項7乃至9の何れか一項に記載のデバイス(10、200及び300)。 - 前記固定ユニット(14及び302)は、第1のセクション(82)と、第2のセクション(84)と、を含み、前記第1のセクション(82)は、前記第2のセクション(84)に対し第3の回転軸(18)廻りに回転する事が出来る
請求項7乃至12の何れか一項に記載のデバイス(10、200及び300)。 - 前記第2のセクション(84)に対し前記第1のセクション(82)を回転させる為の第3の駆動ユニット(90)が提供される
請求項13に記載のデバイス(10、200及び300)。 - 前記第3の駆動ユニット(90)は、少なくとも部分的に、好ましくは、完全に前記メインボディ(12及び202)のハウジング(40)に配置される
請求項14に記載のデバイス(10、200及び300)。 - 前記第3の駆動ユニット(90)は、少なくとも部分的に、好ましくは、完全に前記固定ユニット(14及び302)のハウジング(86)に配置される
請求項14に記載のデバイス(10、200及び300)。 - 前記第3の回転軸(18)は、前記第1の回転軸と前記第2回転軸に対し垂直に配置される
請求項14乃至16の何れか一項に記載のデバイス(10、200及び300)。 - 前記デバイス(10、200及び300)は、手術台に前記デバイス(10、200及び300)を固定する為の保持アーム(16)を含み、前記第3の駆動ユニット(90)は、前記保持アーム(16)内に配置される
請求項14乃至17の何れか一項に記載のデバイス(10、200及び300)。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102015101018.6 | 2015-01-23 | ||
| DE102015101018.6A DE102015101018A1 (de) | 2015-01-23 | 2015-01-23 | Vorrichtung zum Halten und Bewegen eines Laparoskops während einer Operation |
| PCT/EP2016/051190 WO2016116538A1 (de) | 2015-01-23 | 2016-01-21 | Vorrichtung zum halten und bewegen eines laparoskops während einer operation |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018504201A JP2018504201A (ja) | 2018-02-15 |
| JP6676643B2 true JP6676643B2 (ja) | 2020-04-08 |
Family
ID=55236341
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017536851A Expired - Fee Related JP6676643B2 (ja) | 2015-01-23 | 2016-01-21 | 手術中に腹腔鏡を保持し移動させる為のデバイス |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US10792063B2 (ja) |
| EP (1) | EP3247299B1 (ja) |
| JP (1) | JP6676643B2 (ja) |
| KR (1) | KR20170107510A (ja) |
| CN (1) | CN107205778B (ja) |
| BR (1) | BR112017013971A2 (ja) |
| DE (1) | DE102015101018A1 (ja) |
| PL (1) | PL3247299T3 (ja) |
| RU (1) | RU2017129716A (ja) |
| WO (1) | WO2016116538A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102017101875B4 (de) * | 2017-01-31 | 2019-04-18 | Gottfried Wilhelm Leibniz Universität Hannover | Linearstellmechanismus |
| CN108836406A (zh) * | 2018-06-01 | 2018-11-20 | 南方医科大学 | 一种基于语音识别的单人腹腔镜手术系统和方法 |
| CN110367909B (zh) * | 2019-08-23 | 2021-07-06 | 哈尔滨工业大学 | 一种新型的消化内镜送进装置 |
| CN113854950B (zh) * | 2021-10-29 | 2024-09-24 | 佗道医疗科技有限公司 | 一种复用腹腔镜 |
| KR102887221B1 (ko) | 2022-10-31 | 2025-11-14 | 엘지전자 주식회사 | 공기조화기 |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4551058A (en) * | 1983-07-20 | 1985-11-05 | Robotics, Inc. | Low cost articulating/articulating and rotating wrist mechanism for automatic machine tool and automatic machine tool employing the same |
| US5078140A (en) * | 1986-05-08 | 1992-01-07 | Kwoh Yik S | Imaging device - aided robotic stereotaxis system |
| US5279309A (en) | 1991-06-13 | 1994-01-18 | International Business Machines Corporation | Signaling device and method for monitoring positions in a surgical operation |
| JP3476878B2 (ja) * | 1993-11-15 | 2003-12-10 | オリンパス株式会社 | 手術用マニピュレータ |
| WO1996028107A1 (de) | 1995-03-10 | 1996-09-19 | Forschungszentrum Karlsruhe Gmbh | Vorrichtung zur führung chirurgischer instrumente für die endoskopische chirurgie |
| GB9518402D0 (en) | 1995-09-08 | 1995-11-08 | Armstrong Projects Ltd | Improvements in or relating to a robotic apparatus |
| US6451027B1 (en) * | 1998-12-16 | 2002-09-17 | Intuitive Surgical, Inc. | Devices and methods for moving an image capture device in telesurgical systems |
| FR2796263B1 (fr) | 1999-07-15 | 2001-09-21 | Univ Joseph Fourier | Systeme telecommandable de positionnement sur un patient d'un dispositif d'observation/intervention |
| US9296104B2 (en) * | 1999-09-17 | 2016-03-29 | Intuitive Surgical Operations, Inc. | Systems and methods for tracking a path using the null-space |
| US7594912B2 (en) * | 2004-09-30 | 2009-09-29 | Intuitive Surgical, Inc. | Offset remote center manipulator for robotic surgery |
| DE10032203A1 (de) * | 2000-07-01 | 2002-01-17 | Deutsches Krebsforsch | Stereotaxiesystem |
| AU2003214837B2 (en) * | 2002-02-06 | 2008-06-12 | The Johns Hopkins University | Remote center of motion robotic system and method |
| FR2839440B1 (fr) | 2002-05-13 | 2005-03-25 | Perception Raisonnement Action | Systeme de positionnement sur un patient d'un dispositif d'observation et/ou d'intervention |
| DE10305693B4 (de) | 2003-02-12 | 2006-02-16 | Jürgen Michael Knapp | Vorrichtung zum Positionieren und/oder Bewegen eines chirurgischen Instrumentes |
| JP3922284B2 (ja) * | 2004-03-31 | 2007-05-30 | 有限会社エスアールジェイ | 保持装置 |
| US9261172B2 (en) * | 2004-09-30 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Multi-ply strap drive trains for surgical robotic arms |
| CN101273876A (zh) * | 2005-04-18 | 2008-10-01 | M.S.T.医学外科技术有限公司 | 摄像头保持设备及其保持方法 |
| JP4131731B2 (ja) * | 2005-04-25 | 2008-08-13 | 株式会社東芝 | マニピュレータの支持装置 |
| US8167872B2 (en) * | 2006-01-25 | 2012-05-01 | Intuitive Surgical Operations, Inc. | Center robotic arm with five-bar spherical linkage for endoscopic camera |
| DE102006007858A1 (de) | 2006-02-17 | 2007-08-30 | Knapp, Jürgen Michael | Operations-Assistenz-System |
| DE102007019363B4 (de) | 2007-04-23 | 2009-06-25 | Jürgen Michael Knapp | Operations-Assistenz-System |
| EP2008605A1 (en) | 2007-06-25 | 2008-12-31 | Universite Catholique De Louvain | A hybrid manual-robotic system for controlling the position of an instrument |
| GB2454017A (en) | 2007-10-26 | 2009-04-29 | Prosurgics Ltd | A control assembly |
| CN101543394B (zh) * | 2008-03-28 | 2013-03-27 | 德昌电机股份有限公司 | 伸缩式倾斜装置 |
| DE102008016146B4 (de) | 2008-03-28 | 2010-01-28 | Aktormed Gmbh | Operations-Assistenz-System zur Führung eines chirurgischen Hilfsinstrumentes |
| GB2464092A (en) | 2008-09-25 | 2010-04-07 | Prosurgics Ltd | Surgical mechanism control system |
| WO2010122563A1 (en) * | 2009-04-23 | 2010-10-28 | M.S.T. Medical Surgery Technologies Ltd. | Two-part endoscope surgical device |
| DE102009018917A1 (de) | 2009-04-28 | 2010-11-18 | Aktormed Gmbh | Operations-Assistenz-System |
| WO2011149260A2 (ko) * | 2010-05-28 | 2011-12-01 | 주식회사 이턴 | 수술용 로봇 암의 rcm 구조 |
| JP5590983B2 (ja) * | 2010-06-15 | 2014-09-17 | オリンパスメディカルシステムズ株式会社 | 医療器具保持装置 |
| CN101919739B (zh) * | 2010-09-07 | 2011-10-26 | 天津大学 | 一种具有大运动空间高结构刚性的微创机器人机械臂 |
| DE102010052219A1 (de) | 2010-11-24 | 2012-05-24 | Karl Storz Gmbh & Co. Kg | Haltesystem für medizinische Instrumente |
| DE102013002818A1 (de) * | 2013-02-19 | 2014-08-21 | Rg Mechatronics Gmbh | Haltevorrichtung für ein chirurgisches Instrument und eine Schleuse sowie Verfahren zum Betreiben eines Roboters mit einer solchen Haltevorrichtung |
| DE102013012802A1 (de) * | 2013-08-01 | 2015-02-05 | Kuka Laboratories Gmbh | Chirurgisches Instrument |
-
2015
- 2015-01-23 DE DE102015101018.6A patent/DE102015101018A1/de not_active Ceased
-
2016
- 2016-01-21 BR BR112017013971-5A patent/BR112017013971A2/pt not_active Application Discontinuation
- 2016-01-21 WO PCT/EP2016/051190 patent/WO2016116538A1/de not_active Ceased
- 2016-01-21 CN CN201680006739.0A patent/CN107205778B/zh not_active Expired - Fee Related
- 2016-01-21 PL PL16701587T patent/PL3247299T3/pl unknown
- 2016-01-21 KR KR1020177023327A patent/KR20170107510A/ko not_active Ceased
- 2016-01-21 EP EP16701587.4A patent/EP3247299B1/de active Active
- 2016-01-21 RU RU2017129716A patent/RU2017129716A/ru not_active Application Discontinuation
- 2016-01-21 JP JP2017536851A patent/JP6676643B2/ja not_active Expired - Fee Related
-
2017
- 2017-07-19 US US15/654,118 patent/US10792063B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| KR20170107510A (ko) | 2017-09-25 |
| EP3247299A1 (de) | 2017-11-29 |
| EP3247299B1 (de) | 2019-12-25 |
| US20170311969A1 (en) | 2017-11-02 |
| WO2016116538A1 (de) | 2016-07-28 |
| RU2017129716A (ru) | 2019-02-25 |
| CN107205778A (zh) | 2017-09-26 |
| BR112017013971A2 (pt) | 2018-01-02 |
| PL3247299T3 (pl) | 2020-06-29 |
| DE102015101018A1 (de) | 2016-07-28 |
| JP2018504201A (ja) | 2018-02-15 |
| US10792063B2 (en) | 2020-10-06 |
| CN107205778B (zh) | 2020-01-21 |
| RU2017129716A3 (ja) | 2019-06-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12496157B2 (en) | Redundant axis and degree of freedom for hardware-constrained remote center robotic manipulator | |
| JP6907299B2 (ja) | 手術器具マニピュレータの態様 | |
| JP6783910B2 (ja) | マルチポート手術ロボットシステム構造 | |
| JP6342418B2 (ja) | 低侵襲外科手術のための外科手術用器具の保持及び位置決め装置及び/又は内視鏡及びロボット外科手術システム | |
| AU2008234966B2 (en) | A control assembly | |
| JP6676643B2 (ja) | 手術中に腹腔鏡を保持し移動させる為のデバイス | |
| JP6385361B2 (ja) | 外科手術用器具のアクティブ位置決め装置及びこれを備えたロボット手術システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181221 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20191016 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191105 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200117 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200225 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200312 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6676643 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |