JP6671201B2 - 空気調和機 - Google Patents
空気調和機 Download PDFInfo
- Publication number
- JP6671201B2 JP6671201B2 JP2016056544A JP2016056544A JP6671201B2 JP 6671201 B2 JP6671201 B2 JP 6671201B2 JP 2016056544 A JP2016056544 A JP 2016056544A JP 2016056544 A JP2016056544 A JP 2016056544A JP 6671201 B2 JP6671201 B2 JP 6671201B2
- Authority
- JP
- Japan
- Prior art keywords
- occupant
- color
- unit
- imaging
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




















Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24F—AIR-CONDITIONING; AIR-HUMIDIFICATION; VENTILATION; USE OF AIR CURRENTS FOR SCREENING
- F24F11/00—Control or safety arrangements
- F24F11/70—Control systems characterised by their outputs; Constructional details thereof
- F24F11/72—Control systems characterised by their outputs; Constructional details thereof for controlling the supply of treated air, e.g. its pressure
- F24F11/74—Control systems characterised by their outputs; Constructional details thereof for controlling the supply of treated air, e.g. its pressure for controlling air flow rate or air velocity
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24F—AIR-CONDITIONING; AIR-HUMIDIFICATION; VENTILATION; USE OF AIR CURRENTS FOR SCREENING
- F24F11/00—Control or safety arrangements
- F24F11/89—Arrangement or mounting of control or safety devices
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02B—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO BUILDINGS, e.g. HOUSING, HOUSE APPLIANCES OR RELATED END-USER APPLICATIONS
- Y02B30/00—Energy efficient heating, ventilation or air conditioning [HVAC]
- Y02B30/70—Efficient control or regulation technologies, e.g. for control of refrigerant flow, motor or heating
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Air Conditioning Control Device (AREA)
Description
また、本発明に係る空気調和機は、室内を撮像する撮像部と、前記撮像部の撮像結果に基づいて、前記室内の在室者を検出する在室者検出部と、前記在室者検出部によって検出される在室者の服の色、及び/又は、在室者の頭頂部の色に基づいて、在室者の識別を行う在室者識別部と、前記在室者識別部の識別結果に基づいて、空調制御を変更する空調制御部と、を備え、前記在室者検出部は、前記撮像部の撮像結果に基づいて、在室者の顔の位置を特定し、前記在室者識別部は、前記顔の上方に位置する上側画像領域の色に基づいて、在室者の頭頂部の色を特定することを特徴とする。
<空気調和機の構成>
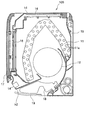
図1は、第1実施形態に係る空気調和機Sが備える室内機100、室外機200、及びリモコン300の正面図である。
空気調和機Sは、ヒートポンプサイクルで冷媒を循環させることによって空調(冷房運転、暖房運転、除湿運転等)を行う機器である。図1に示すように、空気調和機Sは、室内機100と、室外機200と、リモコン300と、を備えている。
リモコン送受信部13は、リモコン300との間で信号を送受信するものである。例えば、運転/停止指令、設定温度の変更、タイマの設定、運転モードの変更等の信号が、リモコン300からリモコン送受信部13に送信される。また、例えば、室内の温湿度の検出値が、リモコン送受信部13からリモコン300に送信され、前記した検出値がリモコン300に表示される。
室外機200は、次に説明する圧縮機21(図2参照)と、四方弁22と、室外熱交換器23と、膨張弁24と、室外ファン25と、を備えている。
図2に示すように、空気調和機Sは、圧縮機21と、四方弁22と、室外熱交換器23と、膨張弁24と、室内熱交換器102と、が環状に順次接続されてなる冷媒回路Qにおいて、周知のヒートポンプサイクルで冷媒を循環させるようになっている。また、室外熱交換器23の付近には室外ファン25が設置され、室内熱交換器102の付近には室内ファン12が設置されている。
室内機100は、図1で説明したリモコン送受信部13(図1参照)と、撮像部14(図1参照)の他に、室内熱交換器11と、室内ファン12と、筐体ベース15と、塵埃フィルタ16と、前面パネル17と、左右風向板18と、上下風向板19と、を備えている。
室内ファン12は、例えば、円筒状のクロスフローファンであり、室内ファンモータ12a(図2参照)によって回転するようになっている。
上下風向板19は、空調室に向かって吹き出される空気の通流方向を、上下方向において調整するための板状部材である。この上下風向板19は、室内ファン12の下流側に配置され、上下風向板用モータ19a(図4参照)によって上下方向に回動するようになっている。
室内機100は、前記した撮像部14等の機器の他に、制御部3と、環境検出部4と、を備えている。
光学レンズ14aは、撮像部14の撮像範囲(画角)やピントを調整するためのレンズである。
撮像素子14bは、光学レンズ14aを介して入射する光を光電変換することによって、撮像画像情報を生成する素子である。なお、撮像素子14bとして、CCDセンサ(Charge Coupled Device)やCMOSセンサ(Complementary Metal Oxide Semiconductor)を用いることができる。
在室者識別部312bは、在室者検出部312aによって検出された在室者の服の色や頭頂部の色等に基づいて、その在室者を識別する機能を有している。
学習処理部312dは、在室者によるリモコン300(図1参照)の操作に応じて設定値(設定温度等)を変更する「通常モード」の実行中、在室者の好みの設定値を学習する学習処理を実行する。また、学習処理部312dは、在室者の好みに合わせた「おまかせモード」において、前記した学習処理の結果に基づいて、設定値を変更する機能も有している。
記憶部321は、図示はしないが、演算処理部322や駆動制御部323のプログラムが格納されるROMと、前記したプログラムが展開されるRAMと、を含んで構成される。
ステップS101において制御部3は、室内機100が設置されている室内の在室者(人体)を検出する。具体的に説明すると、制御部3は、撮像部14の撮像結果に基づき、在室者検出部312aによって、在室者の顔の位置(座標)を特定する。
図6に示す例では、在室者検出部312aによって、在室者A,Bの顔中心の位置(つまり、顔の位置)が検出されている。つまり、在室者Aの顔中心rAの位置(XA,YA)と、在室者Bの顔中心rBの位置(XB,YB)と、が検出されている。ちなみに、在室者の検出は、周知のパターンマッチングを用いて、在室者の頭部や肩部を検出することで行われる。
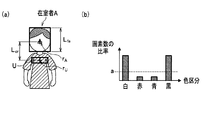
ステップS1021において在室者識別部312bは、在室者の頭部の大きさに関する情報を記憶部311から読み出す。つまり、在室者識別部312bは、在室者の頭部の縦幅Lfa(図8(a)参照)の値を記憶部311から読み出す。
図8(a)に示す例では、顔中心rAを基準として長さLcrだけ下側に、矩形状の下側画像領域Uが設定されている。この下側画像領域Uの色に基づいて、在室者の服の色を特定できる。
図8(b)の横軸は、前記した色空間における色区分である。図8(b)に示す例では、服の色の特定に用いられる色空間が、白・赤・青・黒の四つの色区分に区分けされている。なお、仮に、下側画像領域Uに在室者の首もと等(つまり、皮膚の色)が含まれていたとしても、これを服と混同しないように、図8(b)に示す色区分から肌色を除去している。また、図8(b)の縦軸は、下側画像領域Uの全画素数に対して、各色区分に含まれる色の画素数が占める比率である。
ステップS1023において在室者の服の色を特定した後、ステップS1024において在室者識別部312bは、上側画像領域P(図9(a)参照)を特定する。この上側画像領域Pは、在室者の頭頂部の色の特定(S1025)に用いられる領域であり、顔中心rAよりも上側(つまり、在室者の顔の上方)に位置している。つまり、撮像画像情報の画像上において、在室者の頭頂部に含まれると推定される領域が上側画像領域Pである。
図9(a)に示す例では、顔中心rAを基準として長さLheだけ上側に、矩形状の上側画像領域Pが設定されている。この上側画像領域Pの色に基づいて、在室者の頭頂部の色を特定できる。なお、図9に示す距離Lheは、在室者の顔中心rAと上側画像領域Pの中心rPとの距離(画素数)である。
図9(b)の横軸は、前記した色空間における色の色区分である。図9(b)に示す例では、頭頂部の色の特定に用いられる色空間が、肌色(皮膚の色)・赤・青・灰・黒の五つの色区分に区分けされている。また、図9(b)の縦軸は、上側画像領域Pの全画素数に対して、各色区分に含まれる色の画素数が占める比率である。
なお、在室者の髪型や髪の多さによっては、頭頂部の皮膚が露出していることがあるので、色区分として肌色を含めている。また、在室者の髪に白髪が含まれている場合も考慮し、色区分として灰色も含めている。
なお、在室者の服の色、及び、在室者の頭頂部の色を含む色特徴量は、記憶部311に記憶される。
ステップS1025において在室者の頭頂部の色を特定した後、ステップS1026において在室者識別部312bは、在室者の他の特徴量を抽出する。
在室者識別部312bは、例えば、以下に示す(a)〜(f)のうち少なくとも一つを在室者の「他の特徴量」として特定する。
(a)在室者の顔の皮膚の色
(b)在室者の頭部の形状
(c)在室者の体型
(d)在室者の目の大きさ
(e)在室者の両目間の距離
(f)在室者の唇の横幅
(b)在室者の頭部の形状は、例えば、在室者の頭部の横幅Lbe(画素数)に対して、頭部の縦幅Lfa(画素数)が占める比率(Lfa/Lbe)で表される。
(c)在室者の体型は、例えば、在室者の頭部の横幅Lbeに対して、肩幅Ltiが占める比率(Lti/Lbe)で表される。
(d)在室者の目の大きさは、例えば、在室者の顔の全画素数Nfiに対して、在室者の目の画素数Neyが占める比率(Ney/Nfi)で表される。
(e)在室者の両目間の距離は、例えば、在室者の頭部の横幅Lbeに対して、在室者の両目間の距離Leyが占める比率(Ley/Lbe)で表される。
(f)在室者の唇の横幅は、例えば、在室者の頭部の横幅Lbeに対して、在室者の唇の横幅Lmoが占める比率(Lmo/Lbe)で表される。
次に、図5のステップS103おいて制御部3は、在室者識別部312bによって、在室者識別処理を実行する。
ステップS1031において在室者識別部312bは、ステップS101(図5参照)で検出した在室者のうち一人を指定する。
ステップS1032において在室者識別部312bは、ステップS1031で指定した在室者の特徴量の検出値と、記憶部311に既に登録されている各人の特徴量の登録値と、の比較に基づいて、評価関数fの値を算出する。前記した評価関数fとは、在室者の識別に用いられる関数であり、以下の(数式1)で表される。
ws1*|s1-S1|+ws2*|s2-S2|+…+wsm*|sm-Sm| ・・・(数式1)
ステップS1036において在室者識別部312bは、ステップS101で検出した在室者が、記憶部311にまだ登録されていない新たな在室者であると判定する。
ステップS1035又はステップS1037の処理を行った後、在室者識別部312bの処理は、ステップS1038に進む。
このような一連の処理(S1031〜S1038)を行うことで、在室者識別部312bは、前記した在室者識別処理(S103:図5参照)を実行する。
なお、図13の横軸は時刻である。また、図13の○印は、在室者識別部312bによって在室者が識別された時刻を表している。また、所定時間Δt(例えば、30分)は、室内機100が設置されている部屋から在室者がいなくなったか否かの判定基準となる時間である。
また、在室者Bは、時刻t6以後に検出されていない。したがって、時刻t6から所定時間Δtが経過した時刻t7において「在室時間ゼロ」としてリセットされる。
また、時刻t2に外出した後、時刻t4に室内に戻ってきた在室者Cは、この時刻t4から新たに在室時間が算出される。
ステップS1051において制御部3は、各在室者の在室時間の長さを順序づける。
例えば、図13に示す例では、現在時刻t8における在室者Aの在室時間は(Δt×7)であり、在室者Bの在室時間はゼロであり、在室者Cの在室時間は(Δt×4)である。したがって、ステップS1051において制御部3は、在室時間の長さは在室者Aが最も長く、次いで在室者C,Bの順に長いという順序づけを行う。
本実施形態では、前記したように、在室者の服の色や頭頂部の色等に基づいて、在室者を識別できる。したがって、在室者を顔のみで識別する従来技術と比べて、在室者の識別精度を高めることができる。例えば、撮像部14に対して在室者が後ろを向いた状態であったり、逆光で在室者の顔を識別しにくい状態であっても、本実施形態によれば、服の色等に基づいて在室者を適切に識別できる。また、例えば、室内機100が設置された部屋が比較的広く、撮像部14の視野の内外を在室者が行き来する場合でも、在室者が撮像部14の視野内に入った直後に服の色等に基づいて、在室者を適切に識別できる。
第2実施形態は、第1実施形態で説明した構成(図4参照)に重み係数補正部312e(図15参照)を追加した点が第1実施形態とは異なっているが、その他については第1実施形態と同様である。したがって、第1実施形態と異なる部分について説明し、重複する部分については説明を省略する。
図15に示すように、画像処理部312Aは、在室者検出部312aと、在室者識別部312bと、在室時間算出部312cと、学習処理部312dと、重み係数補正部312eと、を備えている。
ステップS101において在室者を検出し、ステップS102において特徴量抽出処理を行った後、制御部3の処理はステップS201に進む。
図17の横軸は、環境検出値の変化量である。つまり、横軸は、現時点での環境検出値と、前回の環境検出値の差の絶対値である。図17の縦軸は、第1実施形態で説明した重み係数(色重み係数wck及び形状重み係数wsj)である。
本実施形態によれば、前記したように、環境検出値の変化量が大きいほど、色特徴量よりも形状特徴量を重視するように重み係数wck,wsjが変更される。これによって、照明の点灯時・消灯時や、使用される照明の種類が変わったときでも在室者を適切に識別し、ひいては、在室者にとって快適な空調を継続できる。
第3実施形態は、環境検出値の変化量に代えて、在室者の位置の変化量に基づいて評価関数fの重み係数を変更する点が第2実施形態とは異なっているが、その他については第2実施形態と同様である。したがって、第2実施形態とは異なる部分について説明し、重複する部分については説明を省略する。
ステップS101において在室者を検出し、ステップS102において特徴量抽出処理を行った後、制御部3の処理はステップS301に進む。
ステップS301において制御部3は、在室者の位置の変化量を算出する。つまり、制御部3は、現時点での在室者の位置(座標)と、前回に識別した在室者の位置(座標)と、に基づいて、在室者の位置の変化量を算出する。
なお、図19の横軸は、在室者の位置の変化量であり、縦軸は、第1実施形態で説明した重み係数(色重み係数wck及び形状重み係数wsj)である。また、図19に示す位置の変化量と、各重み係数と、の関係は、予め記憶部311に格納されている。
なお、重み係数wck,wsjの一方が高いときには他方が低くなるように、第2実施形態で説明した数式(3)が満たされるように重み係数wck,wsjを設定してもよい。
本実施形態によれば、前記したように、在室者の位置の変化量が大きいほど、形状特徴量よりも色特徴量を重視するように重み係数wck,wsjが変更される。これによって、在室者が室内で動き回っている場合でも、また、在室者がほとんど動かない場合でも在室者を適切に識別し、ひいては、在室者にとって快適な空調を行うことができる。
第4実施形態は、在室者の好みの設定温度等を学習する点が第1実施形態とは異なっているが、その他については第1実施形態(図4参照)と同様である。したがって、第1実施形態と異なる部分について説明し、重複する部分については説明を省略する。
ステップS101において在室者を検出し、ステップS102において特徴量抽出処理を実行し、さらに、ステップS103において在室者識別処理を行った後、制御部3の処理はステップS401に進む。
ステップS404において制御部3は、記憶部311から学習結果を読み出す。
本実施形態によれば、通常モードの実行中に在室者の好みの設定温度等を学習し、おまかせモードでは学習結果に基づく空調を行うことで、在室者の好みに合わせた空調制御を行うことができる。また、在室者の服の色や頭頂部の色に基づいて在室者を適切に識別(S103:図20参照)できることと相まって、空調の快適性を第1実施形態よりもさらに高めることができる。
第5実施形態は、現時点での特徴量の登録値と、現時点での特徴量の検出値と、の平均値を、次回に用いる特徴量の登録値とする点が第4実施形態とは異なっているが、その他については第4実施形態と同様である。したがって、第4実施形態とは異なる部分について説明し、重複する部分については説明を省略する。
図21(a)に示す例では、現時点における在室者Aの各特徴量として、服の色の登録値C1A、頭頂部の色の登録値C2A等が、記憶部311に記憶されている。
図21(a)に示す例では、現時点における在室者Aの各特徴量の検出値として、服の色の検出値c1A、頭頂部の色の検出値c2A等が、記憶部311に記憶されている。
図21(c)に示すように、制御部3は、現時点における特徴量の登録値(図21(a)参照)と、現時点における特徴量の検出値(図21(b)参照)と、の平均値を、次回に用いる特徴量の登録値として用いる。例えば、制御部3は、次回に用いる在室者Aの服の色の登録値として、現時点での服の色の登録値C1Aと、現時点での服の色の検出値c1Aと、の平均値(Ca1+ca1)/2を用いる。なお、他の特徴量についても同様であり、また、他の在室者についても同様である。
なお、図22の横軸は時刻である。縦軸は、在室者Aの服の色を示す特徴量である。また、□印は、現時点における特徴量の登録値であり、○印は、現時点における特徴量の検出値であり、●印は、次回に用いる特徴量の登録値である。
本実施形態では、次回に用いる(つまり、実際に在室者Aの識別に用いる)特徴量の登録値として、前記したように、平均値(C1A+c1A)/2を用いている。これによって、図22に示す○印で示す検出値が急激に変動しても、●印で示す平均値の変動を緩やかにすることができる。つまり、特徴量の登録値が急激に変動することを抑制できる。
本実施形態によれば、照明器具の点灯・消灯や、日射量の経時的な変化(晴天、夕焼け、雲り等)が生じた場合でも、在室者を適切に識別し続けることができる。また、輝度等の自動補正の機能がカメラに備わっている場合でも、この自動補正に伴う特徴量の揺らぎを抑制できる。したがって、在室者の識別を精度よく行い、ひいては、快適な空調を継続できる。
以上、本発明に係る空気調和機Sについて各実施形態により説明したが、本発明はこれらの記載に限定されるものではなく、種々の変更を行うことができる。
例えば、各実施形態では、在室者を識別するための特徴量として、在室者の服の色、頭頂部の色、顔の皮膚の色、頭部の形状、体型、目の大きさ、両目間の距離、及び唇の横幅を用いる場合について説明したが、これに限らない。例えば、在室者の識別に用いる特徴量として、単位時間当たりの在室者の移動距離である「移動量」を追加してもよいし、他の特徴量よりも「移動量」を優先的に用いるようにしてもよい。このように「移動量」を用いることで、例えば、一方は静止しており、他方は動いている二人の在室者を見分けやすくなる。
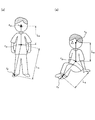
在室者の姿勢を表す特徴量は、例えば、在室者の顔中心rCと体中心rDとの距離Lp(画素数)と、在室者の体中心rDと足の位置rFとの距離Lq(画素数)と、の和(Lq+Lp)で表される。
在室者が座っている姿勢は、立っている姿勢(図23(a)参照)と比較して、在室者の体中心rDと足の位置rFとの距離Lqが短くなる。その結果、在室者が座っているときの和(Lq+Lp)は、在室者が立っているときの和(Lq+Lp)よりも小さくなる。このように、在室者の姿勢の変化に伴って、前記した和(Lq+Lp)の大きさが変化する。このように、在室者の姿勢を表す特徴量として、和(Lq+Lp)を用いることができる。なお、前記した和(Lq+Lp)に代えて、比率(Lp/Lq)を用いてもよいし、また、姿勢を特定する他の周知の方法を用いてもよい。
なお、在室者の服の色、及び/又は、在室者の頭頂部の色に基づいて在室者の識別を行う場合、在室者識別部312bは、在室者検出部312aによって検出される色特徴量の検出値と、記憶部311に記憶されている色特徴量の登録値に基づいて、在室者の識別を行う。このようにしても、服の色や頭頂部の色に基づいて、在室者を適切に識別できる。
また、服の色及び/又は頭頂部の色と、在室者の肌の色、頭部の形状、体型、目の大きさ、両目間の距離、唇の横幅、移動量、姿勢、身長、手・足の長さ、及び声のうち少なくとも一つと、に基づいて在室者を識別するようにしてもよい。
また、前記した機構や構成は説明上必要と考えられるものを示しており、製品上必ずしも全ての機構や構成を示しているとは限らない。
100 室内機
14 撮像部
3 制御部
31 カメラマイコン
32 メインマイコン
311 記憶部
312,312A 画像処理部
312a 在室者検出部
312b 在室者識別部
312c 在室時間算出部
312d 学習処理部
312e 重み係数補正部
321 記憶部
322 演算処理部(空調制御部)
323 駆動制御部(空調制御部)
4 環境検出部
P 上側画像領域
U 下側画像領域
300 リモコン
Claims (3)
- 室内を撮像する撮像部と、
前記撮像部の撮像結果に基づいて、前記室内の在室者を検出する在室者検出部と、
前記在室者検出部によって検出される在室者の服の色、及び/又は、在室者の頭頂部の色に基づいて、在室者の識別を行う在室者識別部と、
前記在室者識別部の識別結果に基づいて、空調制御を変更する空調制御部と、を備え、
前記在室者検出部は、前記撮像部の撮像結果に基づいて、在室者の顔の位置を特定し、さらに、前記撮像部の撮像範囲に占める在室者の頭部の大きさを算出し、
前記在室者識別部は、前記顔の下方に位置する下側画像領域の色に基づいて、在室者の服の色を特定し、さらに、前記撮像範囲における前記頭部の大きさに応じて前記下側画像領域の範囲を変更すること
を特徴とする空気調和機。 - 室内を撮像する撮像部と、
前記撮像部の撮像結果に基づいて、前記室内の在室者を検出する在室者検出部と、
前記在室者検出部によって検出される在室者の服の色、及び/又は、在室者の頭頂部の色に基づいて、在室者の識別を行う在室者識別部と、
前記在室者識別部の識別結果に基づいて、空調制御を変更する空調制御部と、を備え、
前記在室者検出部は、前記撮像部の撮像結果に基づいて、在室者の顔の位置を特定し、
前記在室者識別部は、前記顔の上方に位置する上側画像領域の色に基づいて、在室者の頭頂部の色を特定すること
を特徴とする空気調和機。 - 前記在室者検出部は、前記撮像部の撮像範囲に占める在室者の頭部の大きさを算出し、
前記在室者識別部は、前記撮像範囲における前記頭部の大きさに応じて前記上側画像領域の範囲を変更すること
を特徴とする請求項2に記載の空気調和機。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016056544A JP6671201B2 (ja) | 2016-03-22 | 2016-03-22 | 空気調和機 |
| CN201780004227.5A CN108474583B (zh) | 2016-03-22 | 2017-03-08 | 空调机 |
| PCT/JP2017/009292 WO2017163883A1 (ja) | 2016-03-22 | 2017-03-08 | 空気調和機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016056544A JP6671201B2 (ja) | 2016-03-22 | 2016-03-22 | 空気調和機 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017172828A JP2017172828A (ja) | 2017-09-28 |
| JP2017172828A5 JP2017172828A5 (ja) | 2019-05-09 |
| JP6671201B2 true JP6671201B2 (ja) | 2020-03-25 |
Family
ID=59900188
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016056544A Active JP6671201B2 (ja) | 2016-03-22 | 2016-03-22 | 空気調和機 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP6671201B2 (ja) |
| CN (1) | CN108474583B (ja) |
| WO (1) | WO2017163883A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108981109A (zh) * | 2018-08-30 | 2018-12-11 | 广东美的暖通设备有限公司 | 空调的控制方法、装置及空调 |
| US11892184B2 (en) * | 2018-12-03 | 2024-02-06 | Mitsubishi Electric Corporation | Facility apparatus control device and facility apparatus control method |
| CN109916055A (zh) * | 2019-03-08 | 2019-06-21 | 百度在线网络技术(北京)有限公司 | 控制方法和装置 |
| CN112066450A (zh) * | 2020-09-15 | 2020-12-11 | 美的集团武汉制冷设备有限公司 | 空调器、空调器的控制方法及计算机可读存储介质 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3453870B2 (ja) * | 1994-09-21 | 2003-10-06 | 松下電器産業株式会社 | 画像処理装置と画像処理装置を用いた応用機器 |
| US7956890B2 (en) * | 2004-09-17 | 2011-06-07 | Proximex Corporation | Adaptive multi-modal integrated biometric identification detection and surveillance systems |
| JP2011137589A (ja) * | 2009-12-28 | 2011-07-14 | Mitsubishi Electric Corp | 空気調和機、空気調和機の制御装置 |
| JP5085670B2 (ja) * | 2010-02-24 | 2012-11-28 | 株式会社東芝 | 空調制御システムおよび空調制御方法 |
| JP5511477B2 (ja) * | 2010-04-09 | 2014-06-04 | 三菱電機株式会社 | 空気調和機 |
| US8929592B2 (en) * | 2012-03-13 | 2015-01-06 | Mitsubishi Electric Research Laboratories, Inc. | Camera-based 3D climate control |
| JP5865784B2 (ja) * | 2012-06-05 | 2016-02-17 | 日立アプライアンス株式会社 | 空気調和機 |
| WO2014009291A1 (en) * | 2012-07-12 | 2014-01-16 | Osram Gmbh | Vision based occupancy detection system and method |
| JP2015055384A (ja) * | 2013-09-11 | 2015-03-23 | 日立アプライアンス株式会社 | 空気調和機 |
-
2016
- 2016-03-22 JP JP2016056544A patent/JP6671201B2/ja active Active
-
2017
- 2017-03-08 CN CN201780004227.5A patent/CN108474583B/zh active Active
- 2017-03-08 WO PCT/JP2017/009292 patent/WO2017163883A1/ja active Application Filing
Also Published As
| Publication number | Publication date |
|---|---|
| WO2017163883A1 (ja) | 2017-09-28 |
| CN108474583B (zh) | 2019-05-21 |
| CN108474583A (zh) | 2018-08-31 |
| JP2017172828A (ja) | 2017-09-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6671201B2 (ja) | 空気調和機 | |
| CN107883541B (zh) | 空调控制方法及装置 | |
| CN107166657B (zh) | 一种空调控制方法、装置及空调 | |
| JP5085670B2 (ja) | 空調制御システムおよび空調制御方法 | |
| US20090115597A1 (en) | Energy saving and security system | |
| JP6681816B2 (ja) | 空気調和機 | |
| CN102162667B (zh) | 图像处理装置、图像处理方法及空调控制装置 | |
| WO2017209089A1 (ja) | 機器制御装置及び機器制御方法 | |
| JP5511477B2 (ja) | 空気調和機 | |
| JP5238679B2 (ja) | 空調制御装置、空調制御方法及び輻射温度計測装置 | |
| US20030096572A1 (en) | Space-conditioning control employing image-based detection of occupancy and use | |
| JP2016171526A (ja) | 画像センサ、人検出方法、制御システム、制御方法及びコンピュータプログラム | |
| CN109405206B (zh) | 空气调节设备的送风控制方法和装置 | |
| JP2011137589A (ja) | 空気調和機、空気調和機の制御装置 | |
| KR20190097902A (ko) | 인공지능을 이용하여 지시된 위치로 풍향을 제어하는 에어컨 및 이를 제어하는 방법 | |
| KR102314903B1 (ko) | 영상 기반 건물 제어 방법 및 장치 | |
| JP5279653B2 (ja) | 画像追尾装置、画像追尾方法、及びコンピュータプログラム | |
| JP2017053603A (ja) | 空気調和機 | |
| US20230154464A1 (en) | Electronic apparatus and controlling method thereof | |
| JP2012037102A (ja) | 人物識別装置、人物識別方法及び人物識別装置を備えた空気調和機 | |
| JP7418652B2 (ja) | 人検出装置、電気機器、人検出方法、及び人検出システム | |
| CN107969143A (zh) | 判定支援装置、判定支援方法以及程序 | |
| US20210232834A1 (en) | Device for identifying a clothing family index | |
| CN112699731A (zh) | 基于人体行为识别的空调音乐智能播放方法及装置、空调器 | |
| JP6696687B2 (ja) | 照明制御システム、照明制御方法、照明制御装置及びコンピュータプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20161130 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190319 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190319 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200303 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6671201 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |