JP6659404B2 - 排水処理制御装置及び排水処理システム - Google Patents
排水処理制御装置及び排水処理システム Download PDFInfo
- Publication number
- JP6659404B2 JP6659404B2 JP2016041615A JP2016041615A JP6659404B2 JP 6659404 B2 JP6659404 B2 JP 6659404B2 JP 2016041615 A JP2016041615 A JP 2016041615A JP 2016041615 A JP2016041615 A JP 2016041615A JP 6659404 B2 JP6659404 B2 JP 6659404B2
- Authority
- JP
- Japan
- Prior art keywords
- membrane
- air volume
- air
- target value
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 0 C[S@@]([C@]1COCC1)=C* Chemical compound C[S@@]([C@]1COCC1)=C* 0.000 description 1
Images











Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02W—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO WASTEWATER TREATMENT OR WASTE MANAGEMENT
- Y02W10/00—Technologies for wastewater treatment
- Y02W10/10—Biological treatment of water, waste water, or sewage
Description
図1は、第1の実施形態の排水処理システムとしての下水処理システム10を示す図である。下水処理システム10は、スクリーン100、沈砂池200、最初沈澱池300、曝気槽400、及び処理水槽500を備える。

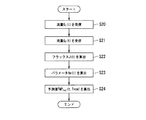
(STEP1)
k=1として、目標値取得部451は、(LとTMPlim)の組み合わせに対する数式(4)のA(=A1とする)と、(LpとTMPmax)の組み合わせに対する数式(4)のA(=A2とする)を計算し、A1=A2か否かをチェックする。A1=A2の場合はk=1とする。A1≠A2の場合はSTEP2に進む。
目標値取得部451は、(LとTMPlim)の組み合わせと(LpとTMPmax)の組み合わせに対する数式(5)の連立方程式を解く。探索法として、ニュートン法などの適当な探索アルゴリズムを用いることができる。他の方法としては、例えば、目標値取得部451は、k=1+α(α>0の微小量)からkを徐々に増加させて数式(5)に対するA1とA2を各々計算して、|A1−A2|<ε(ε:許容誤差)となるkを見つけるなどの方法を採用する。
第1の実施形態では、風量制御部452は、PI制御又はPID制御を行うこととした。一方、第2の実施形態においては、風量制御部452はルールベース制御を行う。具体的に、風量制御部452は、テーブルTBを参照してブロワ412によって供給される空気の風量を段階的に制御する。テーブルTBには、ブロワ412の操作量の変化値Δu(t)が設定される。
また、本実施形態を採用する場合においても、ルールベース制御によって決定された風量を、所定の制御周期の間一定値に保つのではなく、制御周期の間の平均値が決定された風量になるように、より短い周期で振動的にブロワ412を制御することができる。
第1及び第2の実施形態では、風量制御部452は、PI制御、PID制御、又はルールベース制御を行うこととした。一方、第3の実施形態においては、風量制御部452は極値制御を行う。極値制御は、システムに課せられた効率・収益・損失等を一つの評価関数として表現し、その評価関数の値を最大もしくは最小に維持する制御である。
また、本実施形態を採用する場合においても、極値制御によって決定された風量を、所定の制御周期の間一定値に保つのではなく、制御周期の間の平均値が決定された風量になるように、より短い周期で振動的にブロワ412を制御することができる。
第1の実施形態では、予測値取得部453は、数式(10)に示されるように、フラックスX1(t)及び風量X2(t)に基づいてパラメータAm(t)を算出することとした。一方、第4の実施形態においては、予測値取得部453はフラックスX1(t)及び風量X2(t)だけでなく、これら以外の測定値を更に用いてパラメータAm(t)をより精度良く算出する。
第1の実施形態では、図2に示されるように、分離膜407と散気部414が一体化された分離膜ユニットが用いられていた。一方、第5の実施形態では、分離膜407が単体で使用される例について説明する。
第1の実施形態では、風量制御部452は、PI制御又はPID制御を行うこととした。一方、第6の実施形態においては、下水処理システム10が、風量制御部452が算出した操作量u(t)に基づいて操作量V(t)を算出するブロワ制御部417を新たに備えて、ブロワ制御部417(散気制御部)がブロワ412を制御する。
ブロワ制御部417は、風量制御部452が算出した操作量u(t)に基づいてブロワ412を制御する。図11を用いて、ブロワ制御部417の具体的な動作について説明する。
図11において、T1は風量制御部452の制御周期を表し、a1は操作量u(t)を表す。ここで、a1は、風量制御部452によって上記の式(12)を用いて算出された操作量u(t)である。つまり、操作量u(t)は、制御周期T1で算出される。そこで、ブロワ制御部417は、操作量u(t)に基づいて、制御周期T1間において平均風量の操作量が操作量u(t)に一致する操作量V(t)を算出する。この際、ブロワ制御部417は、風量制御部452の制御周期T1未満、かつ、ブロワ412の操作端(弁、回転数)の制御周期T2以上の周期で振動させるように操作量V(t)を算出する。操作量V(t)は、図11におけるa2である。なお、図11では、一定の制御周期T2で制御する構成を示しているが、ブロワ制御部417は不定期な制御周期で制御してもよい。また、ブロワ制御部417は、制御周期T1間において平均風量の操作量が操作量u(t)に一致すれば、制御周期T2以上の周期で操作量V(t)がすべて異なるように算出してもよいし、一部が異なるように算出してもよい。
第1の実施形態では、風量制御部452は、上記式(11)に基づいて算出した差分E(t)を用いて、ブロワ412に対してPI制御を行うこととした。一方、第7の実施形態においては、風量制御部452は、絶対値誤差と、風量制御部452の現在の制御モードとに応じて決定される制御モードで動作してブロワ412の制御を行う。第7の実施形態において風量制御部452は、通常制御モードと、風量一定制御モードとを有する。通常制御モードは、第1の実施形態と同様に上記式(12)で算出された操作量u(t)でブロワ412に対して制御を行うモードである。風量一定制御モードは、風量の操作量を固定してブロワ412に対して制御を行うモードである。風量一定制御モードで使用される操作量は、予め設定されていてもよい。
第1の実施形態ではブロワ412を制御対象としているが、MBRプロセスの多くは、生物処理を行うためのブロワ402による風量制御(補助曝気制御)とMBRプロセスの膜を洗浄するための風量制御(洗浄曝気制御)とがあり、上記各実施形態における風量制御部452の動作は洗浄曝気制御の動作に対応する。洗浄曝気の主目的は膜の洗浄であるが、洗浄曝気は生物処理を行うための酸素供給も兼用しており、洗浄風量だけでは生物処理に必要な酸素の供給が不足する場合が多い。そのため、補助曝気で酸素供給不足を補償している。上記の各実施形態では、洗浄風量を膜洗浄の観点から必要最小量供給することを目的としているが、膜洗浄に必要な風量が極めて少ない場合、補助曝気のみで生物処理を行うための十分な酸素供給を行なえないこともある。
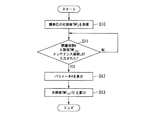
一方、ブロワ412が最大出力ではない場合や、DO目標値とDO測定値との差分値が閾値未満である場合(ステップS62:NO)、風量制御部452はΔQBをΔQB1とする(ステップS65)。その後、風量制御部452は、ステップS64の処理を実行する。
また、本実施形態では、ブロワ412が最大出力、かつ、DO目標値とDO測定値との差分値が閾値以上である場合にステップS63の処理を実行する構成を示したが、風量制御部452はブロワ412が最大出力、かつ、DO目標値とDO測定値との差分値が閾値以上であり、かつ、所定時間(例えば、10分から数10分程度)以上継続している場合にステップS63の処理を実行するように構成されてもよい。
Claims (12)
- 活性汚泥をろ過する分離膜の膜差圧又は膜ろ過抵抗の初期値に基づき、前記初期値の測定時以降の前記膜差圧又は膜ろ過抵抗の目標値を取得する目標値取得部と、
前記分離膜の目詰まりに関する測定値に基づき、前記測定値の測定時以降の前記膜差圧又は膜ろ過抵抗の予測値を取得する予測値取得部と、
前記目標値取得部によって取得された前記目標値と、前記予測値取得部によって取得された前記予測値とに基づき、散気部から前記分離膜に向けて供給される空気の風量を制御する風量制御部と、
を備え、
前記目標値取得部は、前記膜差圧又は膜ろ過抵抗の初期値TMP0、前記膜差圧又は膜ろ過抵抗の上限値TMPlim、メンテナンス周期L、及び閉塞指数kに基づいてパラメータAを算出し、数式(1)に基づいて、前記膜差圧又は膜ろ過抵抗のTMP(t)の前記目標値を算出し、k=1の場合、前記目標値取得部は前記パラメータAを数式(2)に基づいて算出し、k>1の場合、前記目標値取得部は前記パラメータAを数式(3)に基づいて算出し、
- 前記予測値取得部は、前記分離膜の目詰まりに関する測定値の数n、前記分離膜の目詰まりに関する複数の測定値X1(t)〜Xn(t)、及び係数a1〜anを用い、数式(5)に基づいて前記パラメータAm(t)を算出する、
- 前記分離膜の目詰まりに関する複数の測定値は、前記処理水のフラックスと、前記散気部から前記分離膜に向けて供給される空気の風量又は空気倍率とを含む、
請求項2記載の排水処理制御装置。 - 前記分離膜の目詰まりに関する複数の測定値は、更に、水温、MLSS濃度、補助散気量、凝集剤注入量、循環ポンプ流量、返送ポンプ流量、前記活性汚泥又は前記処理水の溶存酸素濃度、ORP、pH、EEM、吸光度、BOD、COD、TOC、アンモニア濃度、硝酸濃度、リン酸濃度、全窒素濃度、全リン濃度、溶解性COD濃度、及び溶解性BOD濃度を表す変数、及びこれらの変数が四則演算されることによって得られる合成変数の少なくとも1つを含む、
請求項3記載の排水処理制御装置。 - 前記予測値取得部は、前記分離膜の目詰まりに関する複数の測定値に基づき、最小二乗法、部分最小二乗法、総最小二乗法、一般化最小二乗法、正則化最小二乗法、サポートベクトル回帰、適合ベクトル回帰のいずれかを用いて前記係数a1〜anを算出する、
請求項2記載の排水処理制御装置。 - 前記風量制御部は、前記目標値と前記予測値との差分に基づき、PI制御、PID制御、ルールベース制御、又は極値制御のいずれかを実行することで、前記散気部から前記分離膜に向けて供給される空気の風量を制御する、
請求項1記載の排水処理制御装置。 - 前記風量制御部によって算出された前記散気部から前記分離膜に向けて供給される空気の風量の操作量に基づいて前記散気部から前記分離膜に向けて供給される空気の風量の操作量を新たに算出する散気制御部をさらに備え、
前記散気制御部は、前記風量制御部から得られる空気の風量の操作量が算出される制御周期間において、前記制御周期より短い周期で操作量を変動させて制御周期間における平均風量の操作量が前記風量制御部から得られる空気の風量の操作量に一致するように操作量を算出する、
請求項1記載の排水処理制御装置。 - 前記風量制御部は、前記目標値と、前記予測値とに基づいて得られる前記空気の風量の操作量で前記散気部に対して制御を行う第1のモードと、風量の操作量を固定して前記散気部に対して制御を行う第2のモードとを有し、所定の条件に従って前記第1のモード又は第2のモードのいずれかで制御を行う、
請求項1記載の排水処理制御装置。 - 前記風量制御部は、前記目標値と、前記予測値とに基づいて得られる前記空気の風量の操作量及び前回の風量の操作量の差分値と、生物処理に必要な酸素供給のための方式に基づいて得られる前記空気の風量の操作量及び前回の風量の操作量の差分値とに基づいて、前記散気部が最大出力時に前記差分値のうち大きい方の差分値を前回の風量の操作量に加算して前記風量の制御を行う、
請求項1記載の排水処理制御装置。 - 汚水をろ過する分離膜と、
前記分離膜に向けて空気を供給する散気部と、
前記分離膜の膜差圧を測定する膜差圧測定部と、
前記膜差圧測定部によって測定された前記膜差圧の初期値に基づき、前記初期値の測定時以降の前記膜差圧の目標値を取得する目標値取得部と、
前記分離膜の目詰まりに関する測定値に基づき、前記測定値の測定時以降の前記膜差圧の予測値を取得する予測値取得部と、
前記目標値取得部によって取得された前記目標値と、前記予測値取得部によって取得された前記予測値に基づき、前記散気部によって供給される空気の風量を制御する風量制御部と、
を備え、
前記目標値取得部は、前記膜差圧又は膜ろ過抵抗の初期値TMP0、前記膜差圧又は膜ろ過抵抗の上限値TMPlim、メンテナンス周期L、及び閉塞指数kに基づいてパラメータAを算出し、数式(6)に基づいて、前記膜差圧又は膜ろ過抵抗のTMP(t)の前記目標値を算出し、k=1の場合、前記目標値取得部は前記パラメータAを数式(7)に基づいて算出し、k>1の場合、前記目標値取得部は前記パラメータAを数式(8)に基づいて算出し、
- 汚水をろ過する分離膜と、
前記分離膜に向けて空気を供給する散気部と、
前記分離膜の膜差圧を測定する膜差圧測定部と、
膜ろ過水量を測定する流量計と、
前記膜ろ過水量を膜面積で除することによりフラックスを算出するフラックス算出部と、
前記膜差圧測定部によって測定された前記膜差圧と、フラックス算出部によって算出されたフラックスとに基づき、膜ろ過抵抗を算出する膜ろ過抵抗算出部と、
前記膜ろ過抵抗算出部によって算出された前記膜ろ過抵抗の初期値に基づき、前記初期値の測定時以降の前記膜ろ過抵抗の目標値を取得する目標値取得部と、
前記分離膜の目詰まりに関する測定値に基づき、前記測定値の測定時以降の前記膜ろ過抵抗の予測値を取得する予測値取得部と、
前記目標値取得部によって取得された前記目標値と、前記予測値取得部によって取得された前記予測値との差分に基づき、前記散気部によって供給される空気の風量を制御する風量制御部と、
を備え、
前記目標値取得部は、前記膜差圧又は膜ろ過抵抗の初期値TMP0、前記膜差圧又は膜ろ過抵抗の上限値TMPlim、メンテナンス周期L、及び閉塞指数kに基づいてパラメータAを算出し、数式(10)に基づいて、前記膜差圧又は膜ろ過抵抗のTMP(t)の前記目標値を算出し、k=1の場合、前記目標値取得部は前記パラメータAを数式(11)に基づいて算出し、k>1の場合、前記目標値取得部は前記パラメータAを数式(12)に基づいて算出し、
- 前記膜ろ過抵抗算出部は、前記膜差圧測定部によって測定された前記膜差圧を前記フラックス算出部で算出された前記フラックスのべき乗で除した値に定数を乗じることにより、前記膜ろ過抵抗を算出することを特徴とする
請求項11の排水処理システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2016/070115 WO2017006988A1 (ja) | 2015-07-07 | 2016-07-07 | 排水処理制御装置及び排水処理システム |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015136407 | 2015-07-07 | ||
| JP2015136407 | 2015-07-07 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017018940A JP2017018940A (ja) | 2017-01-26 |
| JP6659404B2 true JP6659404B2 (ja) | 2020-03-04 |
Family
ID=57887546
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016041615A Active JP6659404B2 (ja) | 2015-07-07 | 2016-03-03 | 排水処理制御装置及び排水処理システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6659404B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7000063B2 (ja) * | 2017-07-31 | 2022-01-19 | 東芝インフラシステムズ株式会社 | 洗浄風量制御装置及び洗浄風量制御方法 |
| JP7075751B2 (ja) * | 2017-12-11 | 2022-05-26 | 株式会社クボタ | ろ過膜の洗浄方法 |
| JP6389948B1 (ja) * | 2017-12-13 | 2018-09-12 | 株式会社クボタ | 水処理施設の管理装置、水処理施設の洗浄薬液発注システム、水処理施設の薬液発注方法及び水処理施設の薬液洗浄計画策定方法 |
| JP6918754B2 (ja) * | 2017-12-13 | 2021-08-11 | 株式会社クボタ | Mbrプラントの管理装置、mbrプラントの洗浄薬液発注システム及びmbrプラントの薬液発注方法 |
| KR102082284B1 (ko) * | 2018-08-30 | 2020-02-27 | 주식회사 포스코건설 | 막분리공정의 여과성능 예측방법 |
| JP7214576B2 (ja) * | 2019-06-12 | 2023-01-30 | 東芝インフラシステムズ株式会社 | 洗浄風量制御システム及び洗浄風量制御装置 |
| JP7472070B2 (ja) | 2021-04-19 | 2024-04-22 | 水ing株式会社 | 浄水処理用のろ過膜の膜閉塞速度の予測方法および浄水処理原水の膜ろ過処理方法 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3572992B2 (ja) * | 1999-04-21 | 2004-10-06 | 日立プラント建設株式会社 | 膜濾過装置の運転方法 |
| JP4603395B2 (ja) * | 2005-03-15 | 2010-12-22 | 株式会社神鋼環境ソリューション | ろ過膜の洗浄方法 |
| JP5034326B2 (ja) * | 2005-06-09 | 2012-09-26 | 東レ株式会社 | 膜ろ過予測方法、及び膜ろ過予測プログラム |
-
2016
- 2016-03-03 JP JP2016041615A patent/JP6659404B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017018940A (ja) | 2017-01-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6659404B2 (ja) | 排水処理制御装置及び排水処理システム | |
| Ferrero et al. | Automatic control system for energy optimization in membrane bioreactors | |
| KR101050374B1 (ko) | 소규모 하수처리시설의 자동 운전장치 | |
| JP2012200705A (ja) | 窒素含有排水の処理方法及び装置 | |
| JP4770726B2 (ja) | 膜ろ過装置の運転条件の決定方法、それを用いた膜ろ過装置 | |
| JP4603395B2 (ja) | ろ過膜の洗浄方法 | |
| JP6522966B2 (ja) | 有機性排水の処理方法及びその処理装置 | |
| JP6250388B2 (ja) | 運転条件演算装置及びこれを備えた水処理システム | |
| WO2017006988A1 (ja) | 排水処理制御装置及び排水処理システム | |
| KR20220024245A (ko) | 하수처리장용 통합제어 시스템 | |
| Ferrero et al. | Development of a control algorithm for air‐scour reduction in membrane bioreactors for wastewater treatment | |
| JP5782931B2 (ja) | 水処理方法及び水処理装置 | |
| Park et al. | Reduction of membrane fouling by simultaneous upward and downward air sparging in a pilot-scale submerged membrane bioreactor treating municipal wastewater | |
| Sabia et al. | Model-based analysis of the effect of different operating conditions on fouling mechanisms in a membrane bioreactor | |
| JP7214576B2 (ja) | 洗浄風量制御システム及び洗浄風量制御装置 | |
| JP6818951B1 (ja) | 水処理装置および水処理方法 | |
| Ho et al. | Performance evaluation of a novel reciprocation membrane bioreactor (rMBR) for enhanced nutrient removal in wastewater treatment: A comparative study | |
| JP7378972B2 (ja) | 膜処理制御システム及び膜処理制御方法 | |
| JP6841365B1 (ja) | 好気性排水処理システム及び排水処理方法 | |
| WO2013136503A1 (ja) | 水処理プラント運用システム及び送水量計画方法 | |
| González et al. | Enhancement of peak flux capacity in membrane bioreactors for wastewater reuse by controlling the backwashing strategy | |
| KR101272273B1 (ko) | 슬러지 계면 관리 수처리 시스템 | |
| Smith | Treating wastewater in a conventional activated sludge (CAS) system or a Membrane Bioreactor (MBR). A comparison of capital and operating costs | |
| JP5034337B2 (ja) | 膜ろ過装置の運転条件の決定方法、およびそれを用いた膜ろ過装置の運転方法 | |
| JP2002336889A (ja) | 水質シミュレーション装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20171019 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180528 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190702 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190902 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200107 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200206 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6659404 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |