JP6653387B2 - ロボット手術システムのためのグラフィカルユーザインタフェース - Google Patents
ロボット手術システムのためのグラフィカルユーザインタフェース Download PDFInfo
- Publication number
- JP6653387B2 JP6653387B2 JP2018530517A JP2018530517A JP6653387B2 JP 6653387 B2 JP6653387 B2 JP 6653387B2 JP 2018530517 A JP2018530517 A JP 2018530517A JP 2018530517 A JP2018530517 A JP 2018530517A JP 6653387 B2 JP6653387 B2 JP 6653387B2
- Authority
- JP
- Japan
- Prior art keywords
- instrument
- end effector
- current
- workspace
- input device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/76—Manipulators having means for providing feel, e.g. force or tactile feedback
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
- A61B2017/00305—Constructional details of the flexible means
- A61B2017/00314—Separate linked members
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
- A61B2017/00318—Steering mechanisms
- A61B2017/00323—Cables or rods
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00973—Surgical instruments, devices or methods, e.g. tourniquets pedal-operated
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/25—User interfaces for surgical systems
- A61B2034/252—User interfaces for surgical systems indicating steps of a surgical procedure
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
- A61B2034/742—Joysticks
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/371—Surgical systems with images on a monitor during operation with simultaneous use of two cameras
Description
6の端部424および426および器械深さ範囲418の端部428および430によって表現されている。器械深さ範囲416および418はまた、それぞれの器械深さ範囲内でのエンドエフェクタの現在の深さを表現する現在の深さインジケータ420および422(この場合には円で示す)をそれぞれ含む。現在の深さインジケータ420は、右側器械208が左側器械212よりも手術作業空間内のさらに奥に置かれているため(図2に示すように)、現在の深さインジケータ422よりも範囲416の端部424に近い。器械深さ範囲416はまた、入力装置作業空間と手術作業空間との間の現在のマッピングに利用できる器械深さ範囲416の一部分を表現する入力装置深さ範囲432(線が引かれた領域として示す)を含む。同様に、器械深さ範囲418は、入力装置作業空間と手術作業空間との間の現在のマッピングに利用できる器械深さ範囲418の一部分を表現する入力装置深さ範囲434(線が引かれた領域として示す)を含む。
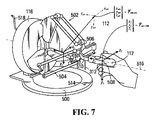
図7に右入力装置116をより詳細に示す。簡潔にするために、右入力装置116のみをさらに説明し、左入力装置118は同じように動作することが理解される。図7を参照して説明すると、入力装置116は、ベース500上に支持され、かつアーム502、504、および506を含む。右ハンドコントローラ112は、アーム502〜506に取り付けられて、デカルト基準フレーム(Cartesian reference frame)の直交軸x1、y1およびz1の位置決めおよび軸周りでの回転を可能にする。デカルト基準フレームは、ハンドコントローラ112の本体に沿って中ほどの点に起点を有し、および起点の位置は、ハンドコントローラ位置508を定義する(すなわち起点において)。この実施形態では、ハンドコントローラ112は、ジンバルマウント510に取り付けられる。アーム502〜506は、ハンドコントローラ112の動きを、従ってハンドコントローラ位置508を、図6に示すような半球形の入力装置作業空間内に留める。一実施形態では、入力装置116はまた、アーム502〜506を通してハンドコントローラ112に触覚フィードバックを提供するために、触力覚を生成するように構成され得る。

によって与えられる。現在のハンドコントローラ回転行列は、
によって与えられる。従って、行列RMCURRは、xr、yr、およびzr固定マスター基準フレームに対するハンドコントローラ112の現在の回転向きを定義する。現在のハンドコントローラ位置ベクトル
図8に右側器械208を詳細に示す。図8を参照して説明すると、位置決め装置209は、ワークステーションプロセッサ回路120からの、通信インターフェース284において受信した制御信号に応答して、器械プロセッサ回路130の駆動制御インターフェース286が生じた駆動信号に応答して、器械マウント108にある様々な駆動部を稼働させることにより、手術作業空間内にエンドエフェクタ210を位置決めするように構成されている。駆動信号は、現在のハンドコントローラ位置ベクトル
および3×3のエンドエフェクタ回転行列REENEWによって表現されている。
従って、REENEWは、xv、yv、およびzv固定スレーブ基準フレームに対するエンドエフェクタ作業空間のエンドエフェクタ210の新しい向きを定義する。ベクトル
システム100が最初に起動するとき、ワークステーションプロセッサ回路120は、マスターベース位置ベクトル
器械の3D空間位置を計算するための、図3に示すプロセス300のブロック306のさらなる詳細を図10に示す。図10を参照して説明すると、プロセス306は、新しいエンドエフェクタ位置および向き制御信号
Aは、マスターとスレーブとの間の平行移動の動きの倍率を表現するスカラー値であり;
REENEWは、エンドエフェクタ210の現在の向きを表現する新しいエンドエフェクタ向き行列であり、および固定スレーブ基準位置552に対して定義され;
REEBASEは、非アクティブ状態からアクティブ状態へのイネーブル信号の最後の移行においてシフトされたエンドエフェクタ210の最後に保存された回転行列REENEWであり;
RMBASE −1は、回転行列RMBASEの逆行列であり、これは、非アクティブ状態からアクティブ状態へのイネーブル信号の最後の移行で保存されたハンドコントローラ112の最後に保存された回転行列RMCURRであり;および
RMCURRは、固定マスター基準フレームxr、yr、およびzrに対してハンドコントローラ112の向きを表現する現在取得された回転行列である)。
右側器械208を図11および図12において曲げたポーズで示す。左側器械212も、図12においてホーム構成に対応する直線ポーズで示す。図11および図12を参照して説明すると、器械208の位置決め装置209は、S字状セグメント700と呼ばれる第1の関節セグメントと、遠位セグメント702と呼ばれる第2の関節セグメントとを有する。これらセグメントは、それぞれ複数の椎骨部550を含む。S字状セグメント700は、挿入管202から、挿入距離qinsと呼ばれる距離をおいて開始し、この挿入距離は、固定スレーブベース基準フレームxv、yv、およびzvの起点において定義される固定スレーブ基準位置552と、第1の位置基準フレームx3、y3、およびz3の起点にある第1の位置704との間の距離である。挿入距離qinsは、挿入管202の端部から延出する、位置決め装置209の曲げることができない部分を表す。図示の実施形態では、挿入距離qinsは、約10〜20mmであり得るが、他の実施形態では、挿入距離は、それよりも長くてもまたは短くてもよく、例えば、0〜100mmで様々である。
qinsは、軸xv、yv、およびzvによって定義されるスレーブ基準位置552から、位置決め装置209のS字状セグメント700が開始する、軸x3、y3、およびz3によって定義される第1の位置704までの距離を表し;
δproxは、S字状セグメント700が固定スレーブ基準フレームのxv−yv平面に対して曲げられる第1の曲げ平面を表し;
θproxは、S字状セグメント700の第1および第2のセクション712および714が第1の曲げ平面において曲げられる角度を表し;
δdistは、遠位セグメント702が固定スレーブ基準フレームのxv−yv平面において曲げられる第2の曲げ平面を表し;
θdistは、第2の曲げで遠位セグメント702が曲げられる角度を表し;
γは、軸z2の周りでのエンドエフェクタ210の回転を表し;および
グリッパは、エンドエフェクタ210のグリッパジョー216のある度合の開放を表す(これは、ジョー216が閉鎖するように作動させるために、アクチュエータを握ることによってオペレータが加える圧力の量を示す、ハンドコントローラ112のアクチュエータ(図示せず)によって生じる信号に対して正比例で計算される値である)。
遠位セグメント702に関連付けられた値θdist、δdist、およびγは、式に従って計算され得る。
を生じる。閉形式解は、θproxに関して見つけることができず、従って、θproxは、式8aまたは式8bのいずれかに対して数式の解を使用して見つけられる必要がある。例えば、ニュートン・ラフソン法が用いられ得、これは、実数値関数のより良好な根を連続して繰り返し概算する。ニュートン・ラフソン法は、以下の式を使用して実動化され得る。
式10は、式f(θprox)=0において書き換えられた式8aである。ニュートン・ラフソン法は、範囲0<θprox<πにおいて、関数は、大きい曲率半径を有し、かつ局所的な停留点を有しないため、非常に迅速に収束する傾向を有する。ニュートン・ラフソン法に続いて、以下の式を使用して式10を満たすために、θproxの改善された連続的な推定を繰り返し行い得る。
図3に示すプロセス300のブロック308のさらなる詳細を図13に示す。図13を参照して説明すると、プロセス308は、図5に示すグラフィック描写136および138を表示するための表示信号を生成するための、ワークステーションプロセッサ回路120によって実行されるコードのブロックを含む。プロセス308は、ブロック306において決定された構成変数の値を使用して、入力装置110および足踏みスイッチ134からの現在の入力に関して、手術作業空間において位置決め装置209に沿った点の箇所を決定する。複数の箇所が固定スレーブ基準位置552に対して手術作業空間内で決定される。プロセス308は、一般的に、基準点のそれぞれに関する理論的な個所、すなわち手術作業空間における第1の位置704、第2の位置708、第3の位置706、第4の位置710およびエンドエフェクタ位置560を決定することを含む。各基準点の理論的な個所が決定されると、手術作業空間内の、位置決め装置209に沿った様々な中間点の理論的な個所が決定され得る。位置決め装置209のS字状セグメント700、および遠位セグメント702のセクション712、714のそれぞれは、複数の椎骨部550を含み、および椎骨部の中心は、同じ距離だけ離間している。S字状セグメント700および遠位セグメント702は、曲げられると、滑らかで連続的な一定半径の湾曲を形成するため、各椎骨部の中心の理論的な個所は数学的に計算され得る。理論的な個所を使用して、器械プロセッサ回路130によって使用される運動制御信号を決定し、手術作業空間での器械208の実際の位置決めのための駆動信号を生成し得る。理論的な個所はまた、ワークステーションプロセッサ回路120によって使用されて、図5に示すグラフィック描写136および138を生成する。
図5に示す器械深さ範囲416の描写は、以下の通り生成される。深さ範囲は、図6に示す軸492に沿って取られ、この範囲の端部424は、領域488内のエンドエフェクタ210の最大深さ494に対応する。器械深さ範囲416の端部426は、領域488内のエンドエフェクタ210の最小深さ496に対応する。入力装置深さ範囲432は、同様に、軸492に沿った、横線が引かれた領域482の部分に対応する。現在の深さインジケータ420は、エンドエフェクタ位置560のz値に対応する箇所において器械深さ範囲416上に位置決めされる。一実施形態では、マイクロプロセッサ250は、エンドエフェクタ210が入力装置深さ範囲の端部424または426のいずれかの近傍にあるとき、アクティブ拘束表示が生成されるようにし得る。警告は、可聴警告、ディスプレイ122に表示される可視警告、または右入力装置116およびハンドコントローラ112を通した触覚フィードバックの形態を取り得る。器械深さ範囲418は、同様に左側器械212に対して生成される。
図5に示す器械回転範囲440は、構成変数γから生成される(すなわち、図11に示すような軸z2の周りでのエンドエフェクタ210の回転)。「Δ」インジケータは、エンドエフェクタ210の現在の回転角度γを表し、ここで、垂直線444は、一般的に非回転位置に保持されている右ハンドコントローラ112に対応する基準を取られる。一連の器械回転範囲440は、ハンドコントローラ112によってもたらされる回転範囲の程度に対応する程度を有する。器械回転範囲440はまた、入力装置作業空間と手術作業空間との間のマッピングに依存してオフセットされ得る。例えば、足踏みスイッチ134が押された後、ハンドコントローラ112は、足踏みスイッチ134を解放する前に回転され得るため、図5に示すように作業回転範囲をオフセットする。
説明されるように計算された右側器械208の位置決め装置209の中間位置は、手術作業空間(図5において484で示す)内の器械208の位置決め装置209の3D箇所を定義する。椎骨部550の各中間箇所に対し、マイクロプロセッサ250は、その箇所が手術作業空間484の3D境界面485の一部分の近傍にあるかどうかを決定する。器械208および212の位置決め装置209の複数の位置のグラフィック描写の例を図14に示す。図14を参照して説明すると、第1の例800は、挿入後の開始位置における器械208および212に関するグラフィック描写136および138を示し、そこでは、位置決め装置209および213は、器械の図の左側の側面図に示すように実質的に直線の位置にある。グラフィック描写136および138は、それぞれ中心に配置された点として位置決め装置209および213を示す。
Claims (17)
- ロボット手術システムにおいて使用される器械の空間位置を概略的に表現する方法であって、前記器械は、エンドエフェクタを含み、前記エンドエフェクタは、入力装置作業空間における入力装置のハンドコントローラの動きによって生成された入力信号に応答して、手術作業空間において前記エンドエフェクタを空間的に位置決めするための位置決め装置に結合されており、前記方法は、
プロセッサ回路が、前記入力装置から受信された現在の入力信号に関して、前記手術作業空間内での前記器械の現在の三次元空間位置を計算すること;
前記プロセッサ回路が、前記プロセッサ回路と通信するディスプレイに前記手術作業空間のグラフィック描写を表示するための表示信号を生成すること
を含み、前記グラフィック描写は、平面的な表現を含み、前記平面的な表現は、
前記手術作業空間内での前記器械の横方向の動きに対する限界を示す境界を有する器械移動領域;および
前記平面的な表現上への前記位置決め装置および前記エンドエフェクタの前記現在の空間位置の二次元投影
を含み、
前記方法は、
前記器械が前記器械移動領域の前記境界の近傍にあるという決定に応答して、前記プロセッサ回路に前記境界におけるアクティブ拘束表示を表示させることをさらに含む、方法。 - ロボット手術システムにおいて使用される器械の空間位置を概略的に表現する方法であって、前記器械は、エンドエフェクタを含み、前記エンドエフェクタは、入力装置作業空間における入力装置のハンドコントローラの動きによって生成された入力信号に応答して、手術作業空間において前記エンドエフェクタを空間的に位置決めするための位置決め装置に結合されており、前記方法は、
プロセッサ回路が、前記入力装置から受信された現在の入力信号に関して、前記手術作業空間内での前記器械の現在の三次元空間位置を計算すること;
前記プロセッサ回路が、前記プロセッサ回路と通信するディスプレイに前記手術作業空間のグラフィック描写を表示するための表示信号を生成すること
を含み、前記グラフィック描写は、平面的な表現を含み、前記平面的な表現は、
前記手術作業空間内での前記器械の横方向の動きに対する限界を示す境界を有する器械移動領域;および
前記平面的な表現上への前記位置決め装置および前記エンドエフェクタの前記現在の空間位置の二次元投影
を含み、
前記グラフィック描写は、
前記手術作業空間内への前記器械の軸方向の動きに対する限界を示す器械深さ範囲;
前記器械深さ範囲内での前記エンドエフェクタの現在の深さを表現するインジケータ;および
前記入力装置作業空間と前記手術作業空間との間の現在のマッピングに利用できる前記器械深さ範囲の一部分を表現する入力装置深さ範囲
をさらに含み、
前記方法は、
前記エンドエフェクタが前記入力装置深さ範囲の端部の近傍にあるという決定に応答して、前記プロセッサ回路にアクティブ拘束表示を表示させることをさらに含む、方法。 - ロボット手術システムにおいて使用される器械の空間位置を概略的に表現する方法であって、前記器械は、エンドエフェクタを含み、前記エンドエフェクタは、入力装置作業空間における入力装置のハンドコントローラの動きによって生成された入力信号に応答して、手術作業空間において前記エンドエフェクタを空間的に位置決めするための位置決め装置に結合されており、前記方法は、
プロセッサ回路が、前記入力装置から受信された現在の入力信号に関して、前記手術作業空間内での前記器械の現在の三次元空間位置を計算すること;
前記プロセッサ回路が、前記プロセッサ回路と通信するディスプレイに前記手術作業空間のグラフィック描写を表示するための表示信号を生成すること
を含み、前記グラフィック描写は、平面的な表現を含み、前記平面的な表現は、
前記手術作業空間内での前記器械の横方向の動きに対する限界を示す境界を有する器械移動領域;および
前記平面的な表現上への前記位置決め装置および前記エンドエフェクタの前記現在の空間位置の二次元投影
を含み、
前記方法は、
前記プロセッサ回路においてイネーブル信号を受信することをさらに含み、前記イネーブル信号は、アクティブ状態および非アクティブ状態を有し、前記アクティブ状態は、前記入力信号に応答して前記器械の動きを可能にし、および前記非アクティブ状態は、前記器械の動きを阻止して、前記入力装置作業空間内での前記ハンドコントローラの再位置決めを容易にし、および前記方法は、
前記アクティブ状態から前記非アクティブ状態へ移行する前記イネーブル信号に応答して、前記プロセッサ回路に、前記エンドエフェクタの前記現在の空間位置の前記二次元投影からのオフセットとして、前記グラフィック描写上に現在のハンドコントローラ位置インジケータを表示するための表示信号を生成させること;および
前記非アクティブ状態から前記アクティブ状態へ移行する前記イネーブル信号に応答して、前記現在のハンドコントローラ位置インジケータの表示を停止すること
をさらに含む、方法。 - ロボット手術システムにおいて使用される器械の空間位置を概略的に表現する方法であって、前記器械は、エンドエフェクタを含み、前記エンドエフェクタは、入力装置作業空間における入力装置のハンドコントローラの動きによって生成された入力信号に応答して、手術作業空間において前記エンドエフェクタを空間的に位置決めするための位置決め装置に結合されており、前記方法は、
プロセッサ回路が、前記入力装置から受信された現在の入力信号に関して、前記手術作業空間内での前記器械の現在の三次元空間位置を計算すること;
前記プロセッサ回路が、前記プロセッサ回路と通信するディスプレイに前記手術作業空間のグラフィック描写を表示するための表示信号を生成すること
を含み、前記グラフィック描写は、平面的な表現を含み、前記平面的な表現は、
前記手術作業空間内での前記器械の横方向の動きに対する限界を示す境界を有する器械移動領域;および
前記平面的な表現上への前記位置決め装置および前記エンドエフェクタの前記現在の空間位置の二次元投影
を含み、
前記入力装置によって生じた前記入力信号は、前記ハンドコントローラの現在の回転を定義する回転信号を含み、前記回転信号は、前記手術作業空間内で前記エンドエフェクタの回転を引き起こすように動作可能であり、前記グラフィック描写は、
前記器械の回転運動に対する限界を示す器械回転範囲;
前記エンドエフェクタの現在の回転を表現するインジケータ;および
前記入力装置作業空間と前記手術作業空間との間の現在のマッピングに利用できる前記器械回転範囲の一部分を表現する入力装置回転範囲
を含み、
前記方法は、
前記プロセッサ回路においてイネーブル信号を受信することをさらに含み、前記イネーブル信号は、アクティブ状態および非アクティブ状態を有し、前記アクティブ状態は、前記入力信号に応答して前記器械の動きを可能にし、および前記非アクティブ状態は、前記器械の動きを阻止して、前記入力装置作業空間内での前記ハンドコントローラの再位置決めを容易にし、および前記方法は、
前記アクティブ状態から前記非アクティブ状態へ移行する前記イネーブル信号に応答して、前記プロセッサ回路に、前記エンドエフェクタの現在の回転を表現する前記インジケータからのオフセットとして、前記グラフィック描写上に現在のハンドコントローラ回転インジケータを表示するための表示信号を生成させること;および
前記非アクティブ状態から前記アクティブ状態へ移行する前記イネーブル信号に応答して、現在のハンドコントローラ回転インジケータの表示を停止すること
をさらに含む方法。 - 前記エンドエフェクタは、インジケータによって表現され、および前記位置決め装置は、前記位置決め装置の少なくとも一部分の二次元投影範囲に対応する領域によって表現される、請求項1から4のいずれか1項に記載の方法。
- 前記手術作業空間内に三次元境界を定義すること;および
前記平面的な表現上に前記三次元境界の二次元投影を生成すること
によって前記境界を生成することをさらに含む、前記境界を生成することを含む、請求項1から4のいずれか1項に記載の方法。 - 前記器械移動領域の前記境界は、前記手術作業空間内での前記器械の動きに対するさらなる限界を特定する少なくとも1つの締め出しゾーンをさらに含む、請求項1から4のいずれか1項に記載の方法。
- 前記締め出しゾーンは、入力装置においてオペレータから受信された入力、および前記プロセッサ回路において受信された患者画像データの少なくとも一方に基づいて定義される、請求項7に記載の方法。
- 前記ロボット手術システムは、前記手術作業空間内の複数の器械を含み、前記グラフィック描写を表示することは、前記複数の器械のそれぞれのグラフィック描写を表示することを含む、請求項1から4のいずれか1項に記載の方法。
- 前記グラフィック描写を表示することは、前記ディスプレイの周辺領域に前記グラフィック描写を表示することを含む、請求項1から4のいずれか1項に記載の方法。
- ロボット手術システムにおいて使用される器械の空間位置を概略的に表現するための装置であって、前記器械は、エンドエフェクタを含み、前記エンドエフェクタは、入力装置作業空間における入力装置のハンドコントローラの動きによって生成された入力信号に応答して、手術作業空間において前記エンドエフェクタを空間的に位置決めするための位置決め装置に結合されており、前記装置は、プロセッサ回路であって、
前記入力装置から受信された現在の入力信号に関して、前記手術作業空間内での前記器械の現在の三次元空間位置を計算すること;
前記プロセッサ回路と通信するディスプレイに前記手術作業空間のグラフィック描写を表示するための表示信号を生成すること
を行うように動作可能に構成されたプロセッサ回路
を含み、
前記グラフィック描写は、平面的な表現を含み、前記平面的な表現は、
前記手術作業空間内での前記器械の横方向の動きに対する限界を示す境界を有する器械移動領域;および
前記平面的な表現上への前記位置決め装置および前記エンドエフェクタの前記現在の空間位置の二次元投影
を含み、
前記プロセッサ回路は、前記器械が前記器械移動領域の前記境界の近傍にあるという決定に応答して、前記境界にアクティブ拘束表示を表示するように動作可能に構成される、
装置。 - 前記グラフィック描写は、
前記手術作業空間内への前記器械の軸方向の動きに対する限界を示す器械深さ範囲;
前記器械深さ範囲内での前記エンドエフェクタの現在の深さを表現するインジケータ;および
前記入力装置作業空間と前記手術作業空間との間の現在のマッピングに利用できる前記器械深さ範囲の一部分を表現する入力装置深さ範囲
をさらに含む、請求項11に記載の装置。 - 前記プロセッサ回路は、前記エンドエフェクタが前記入力装置深さ範囲の端部の近傍にあるという決定に応答して、アクティブ拘束表示を表示するように動作可能に構成される、請求項12に記載の装置。
- 前記プロセッサ回路は、前記プロセッサ回路においてイネーブル信号を受信するように動作可能に構成され、前記イネーブル信号は、アクティブ状態および非アクティブ状態を有し、前記アクティブ状態は、前記入力信号に応答して前記器械の動きを可能にし、および前記非アクティブ状態は、前記器械の動きを阻止して、前記入力装置作業空間内での前記ハンドコントローラの再位置決めを容易にし、前記プロセッサ回路は、
前記アクティブ状態から前記非アクティブ状態へ移行する前記イネーブル信号に応答して、前記エンドエフェクタの前記現在の空間位置の前記二次元投影からのオフセットとして、前記グラフィック描写上に現在のハンドコントローラ位置インジケータを表示するための表示信号を生成すること;および
前記非アクティブ状態から前記アクティブ状態へ移行する前記イネーブル信号に応答して、前記現在のハンドコントローラ位置インジケータの表示を停止すること
を行うように動作可能に構成される、請求項11に記載の装置。 - 前記入力装置によって生じた前記入力信号は、前記ハンドコントローラの現在の回転を定義する回転信号を含み、前記回転信号は、前記手術作業空間内での前記エンドエフェクタの回転を引き起こすように動作可能であり、前記グラフィック描写は、
前記器械の回転運動に対する限界を示す器械回転範囲;
前記エンドエフェクタの現在の回転を表現するインジケータ;および
前記入力装置作業空間と前記手術作業空間との間の現在のマッピングに利用できる前記器械回転範囲の一部分を表現する入力装置回転範囲
を含む、請求項11に記載の装置。 - 前記プロセッサ回路は、前記プロセッサ回路においてイネーブル信号を受信するように動作可能に構成され、前記イネーブル信号は、アクティブ状態および非アクティブ状態を有し、前記アクティブ状態は、前記入力信号に応答して前記器械の動きを可能にし、および前記非アクティブ状態は、前記器械の動きを阻止して、前記入力装置作業空間内での前記ハンドコントローラの再位置決めを容易にし、前記プロセッサ回路は、
前記アクティブ状態から前記非アクティブ状態へ移行する前記イネーブル信号に応答して、前記エンドエフェクタの現在の回転を表現する前記インジケータからのオフセットとして、前記グラフィック描写上に現在のハンドコントローラ回転インジケータを表示するための表示信号を生成すること;および
前記非アクティブ状態から前記アクティブ状態へ移行する前記イネーブル信号に応答して、現在のハンドコントローラ回転インジケータの表示を停止すること
を行うように動作可能に構成される、請求項15に記載の装置。 - ロボット手術システムのプロセッサ回路に、ロボット手術システムにおいて使用される器械の空間位置を表現するように指令するためのコードでコード化されたコンピュータ可読媒体であって、前記器械は、エンドエフェクタを含み、前記エンドエフェクタは、入力装置作業空間における入力装置のハンドコントローラの動きによって生成された入力信号に応答して、手術作業空間においてエンドエフェクタを空間的に位置決めするための位置決め装置に結合されており、前記コードは、前記プロセッサ回路に、
前記入力装置から受信された現在の入力信号に関して、前記手術作業空間内での前記器械の現在の三次元空間位置を計算すること;
前記プロセッサ回路と通信するディスプレイに前記手術作業空間のグラフィック描写を表示するための表示信号を生成すること
を行うように指令し、
前記グラフィック描写は、平面的な表現を含み、前記平面的な表現は、
前記手術作業空間内での前記器械の横方向の動きに対する限界を示す境界を有する器械移動領域;および
前記平面的な表現上への前記位置決め装置および前記エンドエフェクタの前記現在の空間位置の二次元投影
を含み、
前記プロセッサ回路は、前記器械が前記器械移動領域の前記境界の近傍にあるという決定に応答して、前記境界にアクティブ拘束表示を表示するように動作可能に構成される、
コンピュータ可読媒体。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201662280334P | 2016-01-19 | 2016-01-19 | |
| US62/280,334 | 2016-01-19 | ||
| PCT/CA2017/000011 WO2017124177A1 (en) | 2016-01-19 | 2017-01-19 | Graphical user interface for a robotic surgical system |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020010525A Division JP6765021B2 (ja) | 2016-01-19 | 2020-01-27 | ロボット手術システムのためのグラフィカルユーザインタフェース |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2019500945A JP2019500945A (ja) | 2019-01-17 |
| JP6653387B2 true JP6653387B2 (ja) | 2020-02-26 |
Family
ID=59361084
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018530517A Active JP6653387B2 (ja) | 2016-01-19 | 2017-01-19 | ロボット手術システムのためのグラフィカルユーザインタフェース |
| JP2020010525A Active JP6765021B2 (ja) | 2016-01-19 | 2020-01-27 | ロボット手術システムのためのグラフィカルユーザインタフェース |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020010525A Active JP6765021B2 (ja) | 2016-01-19 | 2020-01-27 | ロボット手術システムのためのグラフィカルユーザインタフェース |
Country Status (8)
| Country | Link |
|---|---|
| US (2) | US11504191B2 (ja) |
| EP (1) | EP3380033A4 (ja) |
| JP (2) | JP6653387B2 (ja) |
| KR (2) | KR102518492B1 (ja) |
| CN (3) | CN113456233A (ja) |
| AU (2) | AU2017210349B2 (ja) |
| CA (1) | CA3010896A1 (ja) |
| WO (1) | WO2017124177A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020062521A (ja) * | 2016-01-19 | 2020-04-23 | タイタン メディカル インコーポレイテッドTitan Medical Inc. | ロボット手術システムのためのグラフィカルユーザインタフェース |
Families Citing this family (55)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8663220B2 (en) | 2009-07-15 | 2014-03-04 | Ethicon Endo-Surgery, Inc. | Ultrasonic surgical instruments |
| US11090104B2 (en) | 2009-10-09 | 2021-08-17 | Cilag Gmbh International | Surgical generator for ultrasonic and electrosurgical devices |
| US11871901B2 (en) | 2012-05-20 | 2024-01-16 | Cilag Gmbh International | Method for situational awareness for surgical network or surgical network connected device capable of adjusting function based on a sensed situation or usage |
| US9408622B2 (en) | 2012-06-29 | 2016-08-09 | Ethicon Endo-Surgery, Llc | Surgical instruments with articulating shafts |
| US10687884B2 (en) | 2015-09-30 | 2020-06-23 | Ethicon Llc | Circuits for supplying isolated direct current (DC) voltage to surgical instruments |
| US10595930B2 (en) | 2015-10-16 | 2020-03-24 | Ethicon Llc | Electrode wiping surgical device |
| US11229471B2 (en) | 2016-01-15 | 2022-01-25 | Cilag Gmbh International | Modular battery powered handheld surgical instrument with selective application of energy based on tissue characterization |
| US11007029B2 (en) * | 2016-01-19 | 2021-05-18 | Titan Medical Inc. | Method and apparatus for positioning a workstation for controlling a robotic system |
| US10456193B2 (en) | 2016-05-03 | 2019-10-29 | Ethicon Llc | Medical device with a bilateral jaw configuration for nerve stimulation |
| CN107297399B (zh) * | 2017-08-08 | 2018-10-16 | 南京埃斯顿机器人工程有限公司 | 一种机器人自动寻找折弯位置的方法 |
| US11801098B2 (en) | 2017-10-30 | 2023-10-31 | Cilag Gmbh International | Method of hub communication with surgical instrument systems |
| US11911045B2 (en) | 2017-10-30 | 2024-02-27 | Cllag GmbH International | Method for operating a powered articulating multi-clip applier |
| US11026712B2 (en) | 2017-10-30 | 2021-06-08 | Cilag Gmbh International | Surgical instruments comprising a shifting mechanism |
| US11744604B2 (en) | 2017-12-28 | 2023-09-05 | Cilag Gmbh International | Surgical instrument with a hardware-only control circuit |
| US11896322B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Sensing the patient position and contact utilizing the mono-polar return pad electrode to provide situational awareness to the hub |
| US11109866B2 (en) | 2017-12-28 | 2021-09-07 | Cilag Gmbh International | Method for circular stapler control algorithm adjustment based on situational awareness |
| US11771487B2 (en) | 2017-12-28 | 2023-10-03 | Cilag Gmbh International | Mechanisms for controlling different electromechanical systems of an electrosurgical instrument |
| US10758310B2 (en) | 2017-12-28 | 2020-09-01 | Ethicon Llc | Wireless pairing of a surgical device with another device within a sterile surgical field based on the usage and situational awareness of devices |
| US11166772B2 (en) | 2017-12-28 | 2021-11-09 | Cilag Gmbh International | Surgical hub coordination of control and communication of operating room devices |
| US11832899B2 (en) | 2017-12-28 | 2023-12-05 | Cilag Gmbh International | Surgical systems with autonomously adjustable control programs |
| US11013563B2 (en) | 2017-12-28 | 2021-05-25 | Ethicon Llc | Drive arrangements for robot-assisted surgical platforms |
| US11896443B2 (en) | 2017-12-28 | 2024-02-13 | Cilag Gmbh International | Control of a surgical system through a surgical barrier |
| US11818052B2 (en) | 2017-12-28 | 2023-11-14 | Cilag Gmbh International | Surgical network determination of prioritization of communication, interaction, or processing based on system or device needs |
| US11672605B2 (en) | 2017-12-28 | 2023-06-13 | Cilag Gmbh International | Sterile field interactive control displays |
| US11389164B2 (en) | 2017-12-28 | 2022-07-19 | Cilag Gmbh International | Method of using reinforced flexible circuits with multiple sensors to optimize performance of radio frequency devices |
| US11864728B2 (en) | 2017-12-28 | 2024-01-09 | Cilag Gmbh International | Characterization of tissue irregularities through the use of mono-chromatic light refractivity |
| US11786251B2 (en) | 2017-12-28 | 2023-10-17 | Cilag Gmbh International | Method for adaptive control schemes for surgical network control and interaction |
| US11857152B2 (en) | 2017-12-28 | 2024-01-02 | Cilag Gmbh International | Surgical hub spatial awareness to determine devices in operating theater |
| US11132462B2 (en) | 2017-12-28 | 2021-09-28 | Cilag Gmbh International | Data stripping method to interrogate patient records and create anonymized record |
| US11612444B2 (en) | 2017-12-28 | 2023-03-28 | Cilag Gmbh International | Adjustment of a surgical device function based on situational awareness |
| US11464532B2 (en) | 2018-03-08 | 2022-10-11 | Cilag Gmbh International | Methods for estimating and controlling state of ultrasonic end effector |
| US11090047B2 (en) | 2018-03-28 | 2021-08-17 | Cilag Gmbh International | Surgical instrument comprising an adaptive control system |
| US10058396B1 (en) | 2018-04-24 | 2018-08-28 | Titan Medical Inc. | System and apparatus for insertion of an instrument into a body cavity for performing a surgical procedure |
| US11291445B2 (en) | 2019-02-19 | 2022-04-05 | Cilag Gmbh International | Surgical staple cartridges with integral authentication keys |
| US10939970B2 (en) | 2019-05-22 | 2021-03-09 | Titan Medical Inc. | Robotic surgery system |
| CN113874951A (zh) * | 2019-05-23 | 2021-12-31 | 直观外科手术操作公司 | 用于产生工作区体积和识别外科器械的可及工作区的系统和方法 |
| USD940736S1 (en) | 2019-11-20 | 2022-01-11 | Titan Medical Inc. | Display screen or portion thereof with a graphical user interface |
| US11950797B2 (en) | 2019-12-30 | 2024-04-09 | Cilag Gmbh International | Deflectable electrode with higher distal bias relative to proximal bias |
| US11944366B2 (en) | 2019-12-30 | 2024-04-02 | Cilag Gmbh International | Asymmetric segmented ultrasonic support pad for cooperative engagement with a movable RF electrode |
| US11684412B2 (en) | 2019-12-30 | 2023-06-27 | Cilag Gmbh International | Surgical instrument with rotatable and articulatable surgical end effector |
| US11937863B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Deflectable electrode with variable compression bias along the length of the deflectable electrode |
| US20210196349A1 (en) | 2019-12-30 | 2021-07-01 | Ethicon Llc | Electrosurgical instrument with flexible wiring assemblies |
| US11937866B2 (en) | 2019-12-30 | 2024-03-26 | Cilag Gmbh International | Method for an electrosurgical procedure |
| US11786294B2 (en) | 2019-12-30 | 2023-10-17 | Cilag Gmbh International | Control program for modular combination energy device |
| US11779387B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Clamp arm jaw to minimize tissue sticking and improve tissue control |
| US11786291B2 (en) | 2019-12-30 | 2023-10-17 | Cilag Gmbh International | Deflectable support of RF energy electrode with respect to opposing ultrasonic blade |
| KR20220122703A (ko) * | 2019-12-30 | 2022-09-02 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 해부학적 경계에 대한 접근을 나타내기 위한 시스템 및 방법 |
| US11779329B2 (en) | 2019-12-30 | 2023-10-10 | Cilag Gmbh International | Surgical instrument comprising a flex circuit including a sensor system |
| US11660089B2 (en) | 2019-12-30 | 2023-05-30 | Cilag Gmbh International | Surgical instrument comprising a sensing system |
| US20210196361A1 (en) * | 2019-12-30 | 2021-07-01 | Ethicon Llc | Electrosurgical instrument with monopolar and bipolar energy capabilities |
| US11696776B2 (en) | 2019-12-30 | 2023-07-11 | Cilag Gmbh International | Articulatable surgical instrument |
| US11812957B2 (en) | 2019-12-30 | 2023-11-14 | Cilag Gmbh International | Surgical instrument comprising a signal interference resolution system |
| JP2022088805A (ja) | 2020-12-03 | 2022-06-15 | 株式会社メディカロイド | ロボット手術システムおよび表示方法 |
| DE202021102512U1 (de) | 2021-05-07 | 2022-05-10 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Robotisches Telemanipulationssystem mit adaptierbarem Autonomiegrad, Verwendung eines robotischen Telemanipulationssystems, autonomes medizinisches Robotersystem |
| WO2023126770A1 (en) * | 2021-12-28 | 2023-07-06 | Auris Health, Inc. | Offscreen indicator viewer user interface |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5662111A (en) | 1991-01-28 | 1997-09-02 | Cosman; Eric R. | Process of stereotactic optical navigation |
| US5279309A (en) | 1991-06-13 | 1994-01-18 | International Business Machines Corporation | Signaling device and method for monitoring positions in a surgical operation |
| US7789875B2 (en) * | 1998-02-24 | 2010-09-07 | Hansen Medical, Inc. | Surgical instruments |
| JP2001104333A (ja) * | 1999-10-07 | 2001-04-17 | Hitachi Ltd | 手術支援装置 |
| JP2002253574A (ja) | 2001-03-01 | 2002-09-10 | Hitachi Ltd | 手術支援装置 |
| JP4430937B2 (ja) * | 2001-12-07 | 2010-03-10 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | ノイズの多い画像中で構造を空間的に強調する医用ビューイングシステム及び方法 |
| US8010180B2 (en) | 2002-03-06 | 2011-08-30 | Mako Surgical Corp. | Haptic guidance system and method |
| US7660623B2 (en) * | 2003-01-30 | 2010-02-09 | Medtronic Navigation, Inc. | Six degree of freedom alignment display for medical procedures |
| CA2460119A1 (en) * | 2004-03-04 | 2005-09-04 | Orthosoft Inc. | Graphical user interface for computer-assisted surgery |
| WO2005087128A1 (en) * | 2004-03-05 | 2005-09-22 | Hansen Medical, Inc. | Robotic catheter system |
| US8052636B2 (en) * | 2004-03-05 | 2011-11-08 | Hansen Medical, Inc. | Robotic catheter system and methods |
| US10258285B2 (en) * | 2004-05-28 | 2019-04-16 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic surgical system and method for automated creation of ablation lesions |
| US9789608B2 (en) | 2006-06-29 | 2017-10-17 | Intuitive Surgical Operations, Inc. | Synthetic representation of a surgical robot |
| EP1887961B1 (en) * | 2005-06-06 | 2012-01-11 | Intuitive Surgical Operations, Inc. | Laparoscopic ultrasound robotic surgical system |
| US8398541B2 (en) * | 2006-06-06 | 2013-03-19 | Intuitive Surgical Operations, Inc. | Interactive user interfaces for robotic minimally invasive surgical systems |
| US9266239B2 (en) * | 2005-12-27 | 2016-02-23 | Intuitive Surgical Operations, Inc. | Constraint based control in a minimally invasive surgical apparatus |
| US9089256B2 (en) * | 2008-06-27 | 2015-07-28 | Intuitive Surgical Operations, Inc. | Medical robotic system providing an auxiliary view including range of motion limitations for articulatable instruments extending out of a distal end of an entry guide |
| US8317745B2 (en) * | 2008-03-27 | 2012-11-27 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter rotatable device cartridge |
| KR101650591B1 (ko) * | 2008-06-18 | 2016-08-23 | 엔지니어링 서비시스 인크. | 캘리브레이션 팬텀을 갖는 엠알아이 호환성 로봇 및 팬텀 |
| US8594841B2 (en) | 2008-12-31 | 2013-11-26 | Intuitive Surgical Operations, Inc. | Visual force feedback in a minimally invasive surgical procedure |
| US20100198200A1 (en) | 2009-01-30 | 2010-08-05 | Christopher Horvath | Smart Illumination for Surgical Devices |
| US8418073B2 (en) * | 2009-03-09 | 2013-04-09 | Intuitive Surgical Operations, Inc. | User interfaces for electrosurgical tools in robotic surgical systems |
| CA2847182C (en) | 2011-09-02 | 2020-02-11 | Stryker Corporation | Surgical instrument including a cutting accessory extending from a housing and actuators that establish the position of the cutting accessory relative to the housing |
| US20140001234A1 (en) * | 2012-06-28 | 2014-01-02 | Ethicon Endo-Surgery, Inc. | Coupling arrangements for attaching surgical end effectors to drive systems therefor |
| DE202014010578U1 (de) | 2013-01-10 | 2016-01-07 | M.S.T. Medical Surgery Technologies Ltd. | Chirurgisches Steuersystem |
| EP2951743B1 (en) * | 2013-02-04 | 2020-04-29 | Children's National Medical Center | Hybrid control surgical robotic system |
| CA2897873A1 (en) * | 2013-03-13 | 2014-10-09 | Stryker Corporation | Systems and methods for establishing virtual constraint boundaries |
| EP2928408B1 (en) * | 2013-03-15 | 2019-03-06 | St. Jude Medical International Holding S.à r.l. | Medical device navigation system |
| US9592095B2 (en) | 2013-05-16 | 2017-03-14 | Intuitive Surgical Operations, Inc. | Systems and methods for robotic medical system integration with external imaging |
| WO2014194167A1 (en) | 2013-05-31 | 2014-12-04 | University Of Washington Through Its Center For Commercialization | Surgery pathway guidance and boundary system |
| US10222954B2 (en) * | 2014-06-11 | 2019-03-05 | Canon Kabushiki Kaisha | Image display apparatus, display control apparatus and display control method using thumbnail images |
| JP6290723B2 (ja) | 2014-06-23 | 2018-03-07 | 公立大学法人公立はこだて未来大学 | 手術支援装置および手術支援システム |
| WO2016077543A1 (en) * | 2014-11-13 | 2016-05-19 | Intuitive Surgical Operations, Inc. | User- interface control using master controller |
| KR102518492B1 (ko) * | 2016-01-19 | 2023-04-05 | 타이탄 메디칼 아이엔씨. | 로봇 수술 시스템용 그래픽 사용자 인터페이스 |
-
2017
- 2017-01-19 KR KR1020217015792A patent/KR102518492B1/ko active IP Right Grant
- 2017-01-19 CN CN202110837738.3A patent/CN113456233A/zh active Pending
- 2017-01-19 KR KR1020187023785A patent/KR102258511B1/ko active IP Right Grant
- 2017-01-19 CN CN201780005500.6A patent/CN108463184B/zh active Active
- 2017-01-19 EP EP17740924.0A patent/EP3380033A4/en active Pending
- 2017-01-19 AU AU2017210349A patent/AU2017210349B2/en active Active
- 2017-01-19 US US15/780,593 patent/US11504191B2/en active Active
- 2017-01-19 WO PCT/CA2017/000011 patent/WO2017124177A1/en active Application Filing
- 2017-01-19 CA CA3010896A patent/CA3010896A1/en active Pending
- 2017-01-19 CN CN202110837736.4A patent/CN113456232A/zh active Pending
- 2017-01-19 JP JP2018530517A patent/JP6653387B2/ja active Active
-
2020
- 2020-01-27 JP JP2020010525A patent/JP6765021B2/ja active Active
- 2020-02-21 AU AU2020201255A patent/AU2020201255B2/en active Active
-
2022
- 2022-11-21 US US18/057,510 patent/US20230200918A1/en active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020062521A (ja) * | 2016-01-19 | 2020-04-23 | タイタン メディカル インコーポレイテッドTitan Medical Inc. | ロボット手術システムのためのグラフィカルユーザインタフェース |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20210064404A (ko) | 2021-06-02 |
| CN108463184B (zh) | 2021-08-13 |
| KR20180104047A (ko) | 2018-09-19 |
| JP2020062521A (ja) | 2020-04-23 |
| JP2019500945A (ja) | 2019-01-17 |
| WO2017124177A1 (en) | 2017-07-27 |
| CN113456233A (zh) | 2021-10-01 |
| AU2020201255B2 (en) | 2020-08-13 |
| JP6765021B2 (ja) | 2020-10-07 |
| KR102518492B1 (ko) | 2023-04-05 |
| CN108463184A (zh) | 2018-08-28 |
| US20230200918A1 (en) | 2023-06-29 |
| EP3380033A4 (en) | 2018-12-26 |
| US11504191B2 (en) | 2022-11-22 |
| AU2020201255A1 (en) | 2020-03-12 |
| CA3010896A1 (en) | 2017-07-27 |
| KR102258511B1 (ko) | 2021-05-31 |
| EP3380033A1 (en) | 2018-10-03 |
| CN113456232A (zh) | 2021-10-01 |
| AU2017210349B2 (en) | 2019-12-12 |
| US20180353245A1 (en) | 2018-12-13 |
| AU2017210349A1 (en) | 2018-06-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6653387B2 (ja) | ロボット手術システムのためのグラフィカルユーザインタフェース | |
| US11779419B2 (en) | Autonomous correction of alignment error in a master-slave robotic system | |
| CN111278350B (zh) | 定位外科手术机器人系统的摄像头以捕获患者体腔内的图像 | |
| CN110279427B (zh) | 图像采集装置和可操纵装置活动臂受控运动过程中的碰撞避免 | |
| EP2967348B1 (en) | Intelligent positioning system | |
| CN113456238A (zh) | 器械碰撞检测与反馈 | |
| JP2018508300A (ja) | 遠隔操作医療システムにおける器具の画面上での識別をレンダリングするためのシステム及び方法 | |
| JP2018515198A (ja) | 不整列時のマスターとスレーブと間の向きマッピング | |
| JP2018508301A (ja) | 遠隔操作医療システムにおける器具の画面上での識別のためのシステム及び方法 | |
| CA2948719A1 (en) | Intelligent positioning system and methods therefore | |
| CN110662507A (zh) | 具有自动引导的机器人手术系统 | |
| JP2021151469A (ja) | 連続体ロボットを制御するための方法及び装置 | |
| CN114521131A (zh) | 用于臂间配准的系统和方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180611 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190415 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190521 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190719 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190813 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191112 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191126 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20191223 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200127 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6653387 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |