JP6619985B2 - 自動列車運転装置および列車運転支援装置 - Google Patents
自動列車運転装置および列車運転支援装置 Download PDFInfo
- Publication number
- JP6619985B2 JP6619985B2 JP2015208524A JP2015208524A JP6619985B2 JP 6619985 B2 JP6619985 B2 JP 6619985B2 JP 2015208524 A JP2015208524 A JP 2015208524A JP 2015208524 A JP2015208524 A JP 2015208524A JP 6619985 B2 JP6619985 B2 JP 6619985B2
- Authority
- JP
- Japan
- Prior art keywords
- train
- speed
- braking force
- pattern
- arrival time
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Landscapes
- Electric Propulsion And Braking For Vehicles (AREA)
Description
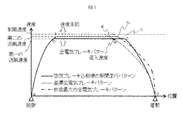
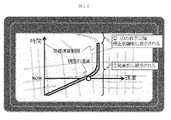
当該運転方法で走行する区間における平均速度に対応する。
Claims (11)
- 少なくとも自列車の応荷重情報を基に自列車の全電気ブレーキによる最大ブレーキ力特性を設定する最大ブレーキ力特性設定手段と、
前記最大ブレーキ力特性、及び、次駅の目標到着時刻の各情報に基づいて、全電気ブレーキによる最大ブレーキ力を利用して当該目標到着時刻以前に次駅に停車するための前記次駅までの巡航速度を設定する巡航速度設定手段と、を備え、
前記巡航速度の情報に基づいて、前記次駅までの駅間におけるブレーキパターンを決定するブレーキパターン決定手段を備え、
前記巡航速度及び前記ブレーキパターンに基づいて列車の走行速度を自動制御することを特徴とする自動列車運転装置。 - 請求項1に記載の自動列車運転装置であって、
前記巡航速度の設定処理を、これから発車する駅の発車前に実施して、当該巡航速度に基づいて列車の走行速度を制御し、
前記ブレーキパターンの決定処理を、前記駅の発車後から前記次駅までの駅間におけるブレーキ開始までに完了させて、当該ブレーキパターンに基づいて列車の走行速度を制御することを特徴とする自動列車運転装置。 - 請求項1または請求項2に記載の自動列車運転装置であって、
前記最大ブレーキ力特性が、速度に応じたブレーキ力として定義されること、
を特徴とする自動列車運転装置。 - 請求項1乃至請求項3のいずれか1項に記載の自動列車運転装置であって、
前記ブレーキパターンが前記次駅への停止制御におけるブレーキパターンであること、
を特徴とする自動列車運転装置。 - 請求項1乃至請求項4のいずれか1項に記載の自動列車運転装置であって、
前記最大ブレーキ力特性設定手段は、天候情報を取得し、雨又は雪を含む車輪が滑りやすい天候条件においては、晴れ及び曇りの天候条件の場合と比べて、前記最大ブレーキ力特性のブレーキ力を小さく設定すること、
を特徴とする自動列車運転装置。 - 請求項1乃至請求項4のいずれか1項に記載の自動列車運転装置であって、
前記最大ブレーキ力特性設定手段は、列車を駆動する駆動装置の故障情報を取得し、故障した駆動装置がある場合においては、故障した駆動装置がない場合と比べて、前記最大ブレーキ力特性のブレーキ力を小さく設定すること、
を特徴とする自動列車運転装置。 - 請求項1乃至請求項6のいずれか1項に記載の自動列車運転装置であって、
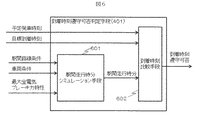
前記巡航速度設定手段は、前記目標到着時刻と駅間路線条件と車両条件と前記最大ブレーキ力特性とを基に、所定の第一の巡航速度と前記最大ブレーキ力特性で次駅まで走行した場合に、目標到着時刻以前に前記次駅へ到着できるか否かを判定する到着時刻遵守可否判定手段と、
前記到着目標着時刻以前に前記次駅へ到着できない場合に、巡航速度を前記第一の巡航速度より高い第二の巡航速度に設定する巡航速度決定手段とを備えること、
を特徴とする自動列車運転装置。 - 請求項7に記載の自動列車運転装置であって、
前記到着時刻遵守可否判定手段は、前記駅間路線条件と前記車両条件と前記第一の巡航速度と前記最大ブレーキ力特性とを入力として、走行シミュレーションを実施し、その結果である駅間走行時分に基づいて前記目標到着時刻以前に前記次駅へ到着できるか否かを判定すること、
を特徴とする自動列車運転装置。 - 請求項1乃至請求項8のいずれか1項に記載の自動列車運転装置であって、
既定の固定ブレーキパターンを保持し、前記ブレーキパターン決定手段の演算終了が自列車の停止制御開始タイミングに間に合わないことが判定された場合に、前記固定ブレーキパターンを使用して列車の走行速度を制御すること、
を特徴とする自動列車運転装置。 - 列車を運転する運転士に運転操作を教示することにより列車の運転を支援する列車運転支援装置であって、
少なくとも自列車の応荷重情報を基に自列車の全電気ブレーキによる最大ブレーキ力特性を設定する最大ブレーキ力特性設定手段と、
前記最大ブレーキ力特性、及び、次駅の目標到着時刻の各情報に基づいて、全電気ブレーキによる最大ブレーキ力を利用して当該目標到着時刻以前に次駅に停車するための前記次駅までの巡航速度を設定する巡航速度設定手段と、
前記巡航速度の情報に基づいて、前記次駅までの駅間におけるブレーキパターンを決定するブレーキパターン決定手段と、
前記巡航速度と前記ブレーキパターンによる前記次駅までの走行パターンを実現するための運転操作を前記運転士に教示する運転操作教示手段とを備えることを特徴とする列車運転支援装置。 - 請求項10に記載の列車運転支援装置であって、
前記走行パターン教示手段は、前記巡航速度に関する教示内容を駅の発車前までに出力し、ブレーキパターンに関する教示内容を駅の発車後から前記次駅までの駅間におけるブレーキ開始までに出力させること、
を特徴とする列車運転支援装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015208524A JP6619985B2 (ja) | 2015-10-23 | 2015-10-23 | 自動列車運転装置および列車運転支援装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015208524A JP6619985B2 (ja) | 2015-10-23 | 2015-10-23 | 自動列車運転装置および列車運転支援装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017085688A JP2017085688A (ja) | 2017-05-18 |
| JP6619985B2 true JP6619985B2 (ja) | 2019-12-11 |
Family
ID=58711461
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015208524A Active JP6619985B2 (ja) | 2015-10-23 | 2015-10-23 | 自動列車運転装置および列車運転支援装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6619985B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6914203B2 (ja) * | 2018-01-04 | 2021-08-04 | 株式会社日立製作所 | 運転支援システム |
| JP7292172B2 (ja) * | 2019-10-10 | 2023-06-16 | 株式会社日立製作所 | 走行パタン作成装置及びその方法 |
| CN112918520B (zh) * | 2021-03-23 | 2022-08-05 | 北京和利时系统工程有限公司 | 一种高速铁路列车的节能运行控制方法 |
| WO2023127241A1 (ja) * | 2021-12-27 | 2023-07-06 | 株式会社日立製作所 | 列車制御システム、車上制御装置、及び列車制御方法 |
| CN114379617B (zh) * | 2022-02-23 | 2024-07-19 | 苏州六头牛信息科技有限公司 | 一种列车节能控制方法 |
| CN117775069A (zh) * | 2024-01-04 | 2024-03-29 | 中车青岛四方机车车辆股份有限公司 | 一种列车自动巡航的控制方法、系统、装置及列车 |
| CN118269906A (zh) * | 2024-03-19 | 2024-07-02 | 比亚迪股份有限公司 | 一种制动控制方法及相关装置 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004357399A (ja) * | 2003-05-28 | 2004-12-16 | Kawasaki Heavy Ind Ltd | 鉄道車両の制御方法及び鉄道車両用制御装置 |
| JP6087805B2 (ja) * | 2013-12-26 | 2017-03-01 | 株式会社東芝 | 運転曲線作成装置、運転支援装置、運転制御装置および運転曲線作成方法 |
-
2015
- 2015-10-23 JP JP2015208524A patent/JP6619985B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017085688A (ja) | 2017-05-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6619985B2 (ja) | 自動列車運転装置および列車運転支援装置 | |
| US9956957B2 (en) | Method and device for regulating a longitudinal acceleration of a vehicle | |
| CN104379396B (zh) | 列车控制装置 | |
| CN109070765B (zh) | 列车控制装置、方法以及计算机可读取的记录介质 | |
| JP5697757B2 (ja) | 走行計画作成装置および自動列車運転装置 | |
| EP3753805A1 (en) | Operation curve preparation device, operation assistance device, and operation control device | |
| US9475510B2 (en) | Method for generating action recommendations for the driver of a rail vehicle or control signals for the rail vehicle by means of a driver assistance system, and driver assistance system | |
| CN102834293A (zh) | 具备目标速度计算功能的列车控制装置 | |
| JP5847596B2 (ja) | 車両走行制御装置及び車両走行支援装置 | |
| CN109229160B (zh) | 应对恶劣天气的列车自动控制方法、装置及车载设备 | |
| US20200108722A1 (en) | Operating procedure for a brake system, brake system and motor vehicle | |
| EP4098510A1 (en) | Stop position-based protection method and system for ato-controlled train passing neutral section | |
| JP6289187B2 (ja) | 列車運行制御システム、車上装置および列車運行制御方法 | |
| JP2017022853A (ja) | 列車制御装置 | |
| TW201926845A (zh) | 用於自動管理電動車輛存儲的能量的方法和系統 | |
| WO2015146587A1 (ja) | 列車制御装置および制御方法 | |
| JP2019089449A (ja) | 列車走行制御装置、方法及びプログラム | |
| CN115923888A (zh) | 一种轨道车辆速度推荐方法、辅助驾驶系统及存储介质 | |
| CN108778862A (zh) | 向列车的司机提供制动器选择建议的方法以及列车司机咨询系统 | |
| JP7321957B2 (ja) | ブレーキ力制御システム及びブレーキ力制御方法 | |
| JP5010297B2 (ja) | 列車制御装置 | |
| JP2001045616A (ja) | 列車の定点停止自動運転方法 | |
| JP2005280542A (ja) | Atc/o装置 | |
| AU2020431937B2 (en) | Travel pattern creation device and operation control method using same | |
| KR102081404B1 (ko) | 철도 차량 에너지 절감 운전 보조 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170111 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20170113 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180913 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190612 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190618 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190805 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191023 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191118 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6619985 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |