JP6561125B2 - 外部ツール支持を有する単一ポート腹腔鏡下アクセスシステム - Google Patents
外部ツール支持を有する単一ポート腹腔鏡下アクセスシステム Download PDFInfo
- Publication number
- JP6561125B2 JP6561125B2 JP2017535619A JP2017535619A JP6561125B2 JP 6561125 B2 JP6561125 B2 JP 6561125B2 JP 2017535619 A JP2017535619 A JP 2017535619A JP 2017535619 A JP2017535619 A JP 2017535619A JP 6561125 B2 JP6561125 B2 JP 6561125B2
- Authority
- JP
- Japan
- Prior art keywords
- tool
- frame
- proximal
- central portion
- horizontal axis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3417—Details of tips or shafts, e.g. grooves, expandable, bendable; Multiple coaxial sliding cannulas, e.g. for dilating
- A61B17/3421—Cannulas
- A61B17/3423—Access ports, e.g. toroid shape introducers for instruments or hands
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00681—Aspects not otherwise provided for
- A61B2017/00738—Aspects not otherwise provided for part of the tool being offset with respect to a main axis, e.g. for better view for the surgeon
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00982—General structural features
- A61B2017/00991—Telescopic means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2901—Details of shaft
- A61B2017/2902—Details of shaft characterized by features of the actuating rod
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2901—Details of shaft
- A61B2017/2904—Details of shaft curved, but rigid
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2901—Details of shaft
- A61B2017/2905—Details of shaft flexible
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2901—Details of shaft
- A61B2017/2906—Multiple forceps
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/50—Supports for surgical instruments, e.g. articulated arms
Description
本発明は、例えば、以下を提供する。
(項目1)
腹腔鏡下ツールシステムであって、
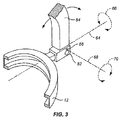
水平平面内に周縁および中心開口部を有するフレームであって、前記フレームは、経表皮的切開の上にあるように構成されている、フレームと、
第1の場所において前記フレームの外部に旋回可能に取り付けられている第1のツールであって、前記第1のツールの中央部分は、前記フレームの前記中心開口部を通過している、第1のツールと、
第2の場所において前記フレームの外部に旋回可能に取り付けられている第2のツールであって、前記第2のツールの中央部分は、前記フレームの前記中心開口部を通過している、第2のツールと
を備え、
前記ツールは、前記フレームに対して少なくとも2つの鉛直平面内で旋回し、前記ツールの中央部分は、前記ツールが前記少なくとも2つの鉛直平面内で旋回させられる場合、干渉を回避するように位置付けられている、システム。
(項目2)
前記フレームは、円形リングを備えている、項目1に記載のシステム。
(項目3)
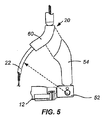
各ツールは、近位および遠位区分を有し、前記近位および遠位区分は、前記フレームの周縁の外側を通過する共通軸に沿っている、項目1に記載のシステム。
(項目4)
前記遠位および近位区分は、伸縮し、アクチュエータおよびエフェクタの延長および後退に対応するように構成されている、項目3に記載のシステム。
(項目5)
各ツールの前記中央部分は、半円形であり、前記近位および遠位区分の共通軸から半径方向内向きに延びている、項目3に記載のシステム。
(項目6)
少なくとも1つのツールは、その遠位端におけるエフェクタと、その近位端におけるアクチュエータと、それを通り抜けているコアとを備え、前記コアは、前記アクチュエータを前記エフェクタに機械的に結合している、項目1に記載のシステム。
(項目7)
前記コアは、前記アクチュエータが前記中央部分に対して延長および後退させられることにより前記エフェクタを延長および後退させ得るように、前記少なくとも1つのツール内を平行移動可能である、項目6に記載のシステム。
(項目8)
腹腔鏡下ツールシステムであって、前記システムは、
経表皮的切開シールであって、前記経表皮的切開シールは、切開の内部側にあるように構成されている一端と、前記切開の外部側にあるように構成されている第2の端部と、前記切開を保護するために前記端部間に延びているシースとを有している、経表皮的切開シールと、
中心開口部と、下側表面と、外部周縁とを有するリングであって、前記下側表面は、前記経表皮的切開シールの前記第2の端部に取り外し可能に取り付くように構成されている、リングと、
前記リングを通る第1の水平軸の周りに旋回するように取り付けられている第1の揺動取り付けブロックと、
前記第1の揺動取り付けブロックを通る第2の水平軸の周りに旋回するように取り付けられている第1の鉛直支持アームと、
前記リングを通る第3の水平軸の周りに旋回するように取り付けられている第2の揺動取り付けブロックと、
前記第2の揺動取り付けブロックを通る第4の水平軸の周りに旋回するように取り付けられている第2の鉛直支持アームと、
前記第1の鉛直支持アームに取り外し可能に取り付けられている第1のツールであって、前記第1のツールは、遠位および近位区分を有し、前記遠位および近位区分は、前記第1の水平軸と前記第2の水平軸との交差点を通過する軸に沿って整列させられている、第1のツールと、
前記第2の鉛直支持アームに取り外し可能に取り付けられている第2のツールであって、前記第2のツールは、遠位および近位区分を有し、前記遠位および近位区分は、前記第3の水平軸と前記第4の水平軸との交差点を通過する軸に沿って整列させられている、第2のツールと
を備えている、システム。
(項目9)
前記第1および第2の揺動取り付けブロックは、前記リングの外部周縁に接続されている、項目8に記載のシステム。
(項目10)
前記第1および第3の水平軸は、軸方向に整列させられ、前記第1および第2の揺動取り付けブロックは、前記リングの両側にある、項目9に記載のシステム。
(項目11)
第1および第2の鉛直支持アームは、それぞれ、前記第1および第2の揺動取り付けブロックに取り付けられており、前記第2の水平軸と前記第4の水平軸とは、平行であるが、互いから水平に間隔を置かれている、項目10に記載のシステム。
(項目12)
各ツールは、前記リングの中心開口部を通過する半円形中央部分を有し、前記中央区分は、前記ツールが、全4つの水平軸の周りに独立して旋回させられる場合、干渉を回避するように位置付けられている、項目11に記載のシステム。
(項目13)
少なくとも1つのツールは、その遠位端におけるエフェクタと、その近位端におけるアクチュエータと、それを通り抜けているコアとを備え、前記コアは、前記アクチュエータを前記エフェクタに機械的に結合している、項目8に記載のシステム。
(項目14)
前記コアは、前記アクチュエータが前記中央部分に対して延長および後退させられることにより前記エフェクタを延長および後退させ得るように、前記シール少なくとも1つのツール内で平行移動可能である、項目13に記載のシステム。
(項目15)
前記遠位および近位区分は、前記アクチュエータおよびエフェクタの延長および後退に対応するために伸縮するように構成されている、項目14に記載のシステム。
(項目16)
単一ポートを通して腹腔鏡下外科手術を行う方法であって、前記方法は、
中心開口部を有するフレームを患者の腹部内の切開の上に固定し、前記単一ポートを画定することと、
前記フレームの外側周縁上の第1の場所において第1のツールを第1の旋回取り付け要素に取り付けることと、
前記フレームの外側周縁上の第2の場所において第2のツールを第2の旋回取り付け要素に取り付けることと、
を含み、
各ツールは、前記旋回取り付け要素を通過する軸上にある遠位および近位区分と、中央部分とを有し、前記中央部分は、外科手術中、前記ツールがユーザによって操作されている場合、前記フレームの中心開口部内に位置付けられたままであるが、干渉を回避する、方法。
(項目17)
前記第1および第2のツールのうちの1つを取り外し、第3のツールをそれぞれの旋回取り付け要素に取り付けることをさらに含み、前記第3のツールは、前記旋回取り付け要素を通過する軸上にある遠位および近位区分と、中央部分とを有し、前記中央部分は、外科手術中、前記ツールがユーザによって操作されている場合、前記フレームの中心開口部内に位置付けられたままである、項目16に記載の方法。
(項目18)
前記ツールの近位端を操作し、前記遠位区分を外科手術野内の所望の場所に旋回可能に位置付けることをさらに含む、項目16に記載の方法。
(項目19)
前記ツールの近位端を軸方向に延長および後退させ、前記遠位区分を軸方向に延長および後退させることをさらに含む、項目18に記載の方法。
本明細書に記載される全ての刊行物、特許、および特許出願は、各個々の刊行物、特許、または特許出願が、具体的かつ個々に、参照することによって組み込まれることが示される場合と同程度において、参照することによって本明細書に組み込まれる。
Claims (19)
- 腹腔鏡下ツールシステムであって、前記システムは、
水平平面内に周縁および中心開口部を有するフレームであって、前記フレームは、経表皮的切開の上にあるように構成されている、フレームと、
第1の場所において前記フレームの外部に旋回可能に取り付けられている第1のツールであって、前記第1のツールの中央部分は、前記フレームの前記中心開口部を通過している、第1のツールと、
第2の場所において前記フレームの外部に旋回可能に取り付けられている第2のツールであって、前記第2のツールの中央部分は、前記フレームの前記中心開口部を通過している、第2のツールと
を備え、
前記ツールは、前記フレームに対して少なくとも2つの鉛直平面内で旋回し、前記ツールの中央部分は、前記ツールが前記少なくとも2つの鉛直平面内で旋回させられる場合、干渉を回避するように位置付けられている、システム。 - 前記フレームは、円形リングを備えている、請求項1に記載のシステム。
- 各ツールは、近位区分および遠位区分を有し、前記近位区分および前記遠位区分は、前記フレームの周縁の外側を通過する共通軸に沿っている、請求項1に記載のシステム。
- 前記遠位区分および前記近位区分は、アクチュエータおよびエフェクタの延長および後退に対応するために伸縮するように構成されている、請求項3に記載のシステム。
- 各ツールの前記中央部分は、半円形であり、前記近位区分および前記遠位区分の共通軸から半径方向内向きに延びている、請求項3に記載のシステム。
- 少なくとも1つのツールは、その遠位端におけるエフェクタと、その近位端におけるアクチュエータと、それを通り抜けているコアとを備え、前記コアは、前記アクチュエータを前記エフェクタに機械的に結合している、請求項1に記載のシステム。
- 前記コアは、前記アクチュエータが前記中央部分に対して延長および後退させられることにより前記エフェクタを延長および後退させ得るように、前記少なくとも1つのツール内を平行移動可能である、請求項6に記載のシステム。
- 腹腔鏡下ツールシステムであって、前記システムは、
経表皮的切開シールであって、前記経表皮的切開シールは、切開の内部側にあるように構成されている一端と、前記切開の外部側にあるように構成されている第2の端部と、前記切開を保護するために前記端部間に延びているシースとを有している、経表皮的切開シールと、
中心開口部と、下側表面と、外部周縁とを有するリングであって、前記下側表面は、前記経表皮的切開シールの前記第2の端部に取り外し可能に取り付くように構成されている、リングと、
前記リングを通る第1の水平軸の周りに旋回するように取り付けられている第1の揺動取り付けブロックと、
前記第1の揺動取り付けブロックを通る第2の水平軸の周りに旋回するように取り付けられている第1の鉛直支持アームと、
前記リングを通る第3の水平軸の周りに旋回するように取り付けられている第2の揺動取り付けブロックと、
前記第2の揺動取り付けブロックを通る第4の水平軸の周りに旋回するように取り付けられている第2の鉛直支持アームと、
前記第1の鉛直支持アームに取り外し可能に取り付けられている第1のツールであって、前記第1のツールは、遠位区分および近位区分を有し、前記遠位区分および近位区分は、前記第1の水平軸と前記第2の水平軸との交差点を通過する軸に沿って整列させられている、第1のツールと、
前記第2の鉛直支持アームに取り外し可能に取り付けられている第2のツールであって、前記第2のツールは、遠位区分および近位区分を有し、前記遠位区分および近位区分は、前記第3の水平軸と前記第4の水平軸との交差点を通過する軸に沿って整列させられている、第2のツールと
を備えている、システム。 - 前記第1の揺動取り付けブロックおよび前記第2の揺動取り付けブロックは、前記リングの外部周縁に接続されている、請求項8に記載のシステム。
- 前記第1の水平軸および前記第3の水平軸は、軸方向に整列させられ、前記第1の揺動取り付けブロックおよび前記第2の揺動取り付けブロックは、前記リングの両側にある、請求項9に記載のシステム。
- 第1の鉛直支持アームおよび第2の鉛直支持アームは、それぞれ、前記第1の揺動取り付けブロックおよび前記第2の揺動取り付けブロックに取り付けられており、前記第2の水平軸と前記第4の水平軸とは、平行であるが、互いから水平に間隔を置かれている、請求項10に記載のシステム。
- 各ツールは、前記リングの中心開口部を通過する半円形中央部分を有し、前記中央区分は、前記ツールが全4つの水平軸の周りに独立して旋回させられる場合、干渉を回避するように位置付けられている、請求項11に記載のシステム。
- 少なくとも1つのツールは、その遠位端におけるエフェクタと、その近位端におけるアクチュエータと、それを通り抜けているコアとを備え、前記コアは、前記アクチュエータを前記エフェクタに機械的に結合している、請求項8に記載のシステム。
- 前記コアは、前記アクチュエータが前記中央部分に対して延長および後退させられることにより前記エフェクタを延長および後退させ得るように、前記シール少なくとも1つのツール内で平行移動可能である、請求項13に記載のシステム。
- 前記遠位区分および前記近位区分は、前記アクチュエータおよび前記エフェクタの延長および後退に対応するために伸縮するように構成されている、請求項14に記載のシステム。
- 単一ポートを通して腹腔鏡下外科手術を行うためのシステムであって、前記システムは、
前記単一ポートを画定するように患者の腹部内の切開の上に中心開口部を有する固定フレームと、
前記フレームの外側周縁上の第1の場所において第1の旋回取り付け要素に取り付けられる第1のツールと、
前記フレームの外側周縁上の第2の場所において第2の旋回取り付け要素に取り付けられる第2のツールと
を備え、
各ツールは、前記旋回取り付け要素を通過する軸上にある遠位区分および近位区分と、中央部分とを有し、前記中央部分は、外科手術中、前記ツールがユーザによって操作されている場合、前記フレームの中心開口部内に位置付けられたままであるが、干渉を回避する、システム。 - 前記第1の旋回取り付け要素または前記第2の旋回取り付け要素に取り付けられる第3のツールをさらに備え、前記第3のツールは、前記第1のツールまたは前記第2のツールのそれぞれに取って代わり、前記第3のツールは、前記旋回取り付け要素を通過する軸上にある遠位区分および近位区分と、中央部分とを有し、前記中央部分は、外科手術中、前記ツールがユーザによって操作されている場合、前記フレームの中心開口部内に位置付けられたままである、請求項16に記載のシステム。
- 前記ツールの近位端の移動は、前記遠位区分を外科手術野内の所望の場所に旋回可能に位置付けさせる、請求項16に記載のシステム。
- 前記ツールの近位端は、前記遠位区分を軸方向に延長および後退させるように軸方向に延長可能および後退可能である、請求項18に記載のシステム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/491,990 | 2014-09-20 | ||
| US14/491,990 US10251704B2 (en) | 2014-09-20 | 2014-09-20 | Single port laparoscopic access system with external tool support |
| PCT/US2015/051274 WO2016044850A1 (en) | 2014-09-20 | 2015-09-21 | Single port laparoscopic access system with external tool support |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017528299A JP2017528299A (ja) | 2017-09-28 |
| JP2017528299A5 JP2017528299A5 (ja) | 2018-10-18 |
| JP6561125B2 true JP6561125B2 (ja) | 2019-08-14 |
Family
ID=55524692
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017535619A Active JP6561125B2 (ja) | 2014-09-20 | 2015-09-21 | 外部ツール支持を有する単一ポート腹腔鏡下アクセスシステム |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US10251704B2 (ja) |
| EP (1) | EP3193736B1 (ja) |
| JP (1) | JP6561125B2 (ja) |
| KR (1) | KR20170063730A (ja) |
| CN (1) | CN107106156B (ja) |
| WO (1) | WO2016044850A1 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10779806B2 (en) | 2016-10-12 | 2020-09-22 | Maciej J. Kieturakis | Cable sheaths and assemblies for use in curved medical and other tools |
| US20190307474A1 (en) * | 2018-04-10 | 2019-10-10 | Maciej J. Kieturakis | Robotically supported laparoscopic access tools |
| US11324536B2 (en) * | 2018-06-19 | 2022-05-10 | Maciej J. Kieturakis | Seal for laparoscopic access port |
| JPWO2021085471A1 (ja) * | 2019-10-29 | 2021-05-06 | ||
| CN111568556B (zh) * | 2020-06-04 | 2021-02-23 | 中南大学湘雅三医院 | 消化外科交叉手术器械组件 |
| US11717149B1 (en) | 2022-04-27 | 2023-08-08 | Maciej J. Kieturakis | Methods and systems for robotic single-port laparoscopic access |
| KR20230168869A (ko) * | 2022-06-08 | 2023-12-15 | 계명대학교 산학협력단 | 단일공 복강경 수술 로봇 및 이의 제어 시스템 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3965890A (en) | 1974-10-18 | 1976-06-29 | William Kohlmann Gauthier | Surgical retractor |
| US6200263B1 (en) | 1998-01-23 | 2001-03-13 | United States Surgical Corporation | Surgical instrument holder |
| US6558407B1 (en) * | 2000-10-24 | 2003-05-06 | Tyco Healthcare Group Lp | Breast stabilizer with instrument guide |
| US8961407B2 (en) * | 2004-07-21 | 2015-02-24 | Covidien Lp | Surgical port assembly |
| EP1861022A2 (en) | 2005-03-22 | 2007-12-05 | Atropos Limited | A surgical instrument |
| KR101822685B1 (ko) * | 2010-06-25 | 2018-01-26 | 마치에 제이. 키에투라키스 | 좌우로 이격된 가상 삽입 지점을 갖는 단일 포트 복강경의 접근을 위한 기구 |
| US9259240B2 (en) * | 2011-03-29 | 2016-02-16 | Covidien Lp | Articulating surgical access system for laparoscopic surgery |
-
2014
- 2014-09-20 US US14/491,990 patent/US10251704B2/en active Active
-
2015
- 2015-09-21 WO PCT/US2015/051274 patent/WO2016044850A1/en active Application Filing
- 2015-09-21 KR KR1020177010366A patent/KR20170063730A/ko not_active Application Discontinuation
- 2015-09-21 JP JP2017535619A patent/JP6561125B2/ja active Active
- 2015-09-21 EP EP15841797.2A patent/EP3193736B1/en active Active
- 2015-09-21 CN CN201580058131.8A patent/CN107106156B/zh active Active
-
2019
- 2019-03-07 US US16/295,500 patent/US20200069387A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| EP3193736B1 (en) | 2019-11-06 |
| JP2017528299A (ja) | 2017-09-28 |
| EP3193736A1 (en) | 2017-07-26 |
| US20160081752A1 (en) | 2016-03-24 |
| CN107106156A (zh) | 2017-08-29 |
| CN107106156B (zh) | 2019-07-26 |
| KR20170063730A (ko) | 2017-06-08 |
| EP3193736A4 (en) | 2018-05-23 |
| US20200069387A1 (en) | 2020-03-05 |
| US10251704B2 (en) | 2019-04-09 |
| WO2016044850A1 (en) | 2016-03-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6561125B2 (ja) | 外部ツール支持を有する単一ポート腹腔鏡下アクセスシステム | |
| JP5851499B2 (ja) | 側方に離間した仮想挿入点を伴う単一ポート腹腔鏡下アクセス | |
| US11141236B2 (en) | Instrument holder | |
| US9795449B2 (en) | Methods and devices for performing abdominal surgery | |
| US9820766B2 (en) | Dual directional articulation hand instrument | |
| JP5587318B2 (ja) | 最小侵襲手術用器具 | |
| JP5701584B2 (ja) | 最小侵襲性外科手術のための懸垂システム | |
| US8968187B2 (en) | Articulating laparoscopic surgical access instrument | |
| US20120253326A1 (en) | Articulation of Laparoscopic Instrument | |
| US9179933B2 (en) | Gear driven triangulation | |
| JP2012101068A (ja) | 低侵襲性外科手術のための懸架システム | |
| US20140018614A1 (en) | Laparoscopic scaffold assembly | |
| US20190307474A1 (en) | Robotically supported laparoscopic access tools | |
| US20130178712A1 (en) | Triangulation Methods with Hollow Segments | |
| EP3498199B1 (en) | Laparoscopic tissue manipulation device | |
| JP2020115968A (ja) | 手術システムおよび支持装置 | |
| US11717149B1 (en) | Methods and systems for robotic single-port laparoscopic access | |
| US20190388080A1 (en) | Surgical retractors |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180906 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180906 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190625 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190627 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190722 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6561125 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |