JP6560355B2 - ランドマーク認識装置及び認識方法 - Google Patents
ランドマーク認識装置及び認識方法 Download PDFInfo
- Publication number
- JP6560355B2 JP6560355B2 JP2017537566A JP2017537566A JP6560355B2 JP 6560355 B2 JP6560355 B2 JP 6560355B2 JP 2017537566 A JP2017537566 A JP 2017537566A JP 2017537566 A JP2017537566 A JP 2017537566A JP 6560355 B2 JP6560355 B2 JP 6560355B2
- Authority
- JP
- Japan
- Prior art keywords
- landmark
- pattern
- information
- database
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0246—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using a video camera in combination with image processing means
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T1/00—General purpose image data processing
- G06T1/0007—Image acquisition
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/10—Segmentation; Edge detection
- G06T7/11—Region-based segmentation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
- G06V20/582—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads of traffic signs
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/588—Recognition of the road, e.g. of lane markings; Recognition of the vehicle driving pattern in relation to the road
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
- G06T2207/30256—Lane; Road marking
Description
パターン抽出処理ステップS24で算出したパターンがデータベース6に登録したパターンと一致した場合は、一致したデータベースのランドマークとして認識される。一方、データベース6に登録したパターンと一致しない場合は、画像取得処理ステップS21で取得した画像はランドマークではないと判断する。
Claims (5)
- 移動体に搭載されて周囲の画像を取得する画像取得手段と、取得した画像を処理してランドマークを認識する処理装置を備え、道路上に描かれた複数種類の道路標示および/または道路脇に設置された複数種類の道路標識をランドマークとして認識するためのランドマーク認識装置であって、
前記処理装置は、
ランドマークの種類毎に、取得した画像のうち前記ランドマークを含む領域を特定し、前記ランドマークに正対するためのランドマーク抽出情報と、ランドマークパターン情報を当該ランドマークと判定するためのランドマーク判定条件情報を対応付けて格納したデータベースと、
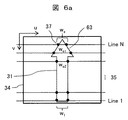
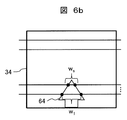
前記取得した画像のうち前記ランドマークを含む領域について、前記ランドマークに正対する方向からランドマークに対して平行な方向に複数の分割線を設定し、当該分割線とランドマーク境界の交点間の距離を求める分割処理部と、
前記複数の分割線ごとに求めた前記交点間の距離に応じて、前記ランドマークのパターンの特徴を示す前記ランドマークパターン情報を数値情報として得るパターン抽出処理部と、
該パターン抽出処理部で抽出した前記ランドマークパターン情報と、前記データベースに登録したランドマーク判定条件情報とを比較して、ランドマークの種類を特定するデータベース比較処理部とを有することを特徴とするランドマーク認識装置。 - 請求項1に記載のランドマーク認識装置であって、
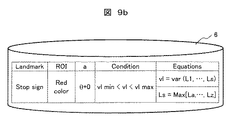
前記データベースは、前記ランドマーク抽出情報として前記取得した画像のうち前記ランドマークを含む領域と前記ランドマークに正対するための角度の情報をランドマークの種類毎に備え、前記ランドマークのパターンの特徴を示す前記ランドマークパターン情報を数値情報として得るための関数をランドマークの種類毎に備え、ランドマーク判定条件情報として前記関数により算出した数値を評価する判定条件式をランドマークの種類毎に備えていることを特徴とするランドマーク認識装置。 - 請求項2に記載のランドマーク認識装置であって、
前記分割処理部は、ランドマークに対する移動体の姿勢を推定し、該姿勢と前記データベースに登録した各々のランドマークの前記領域と前記角度をもとに、画像上に前記分割線を設定する領域と角度を決定し、前記分割線とランドマークの境界の交点間の距離を求めることを特徴とするランドマーク認識装置。 - 請求項2に記載のランドマーク認識装置であって、
パターン抽出処理部は、前記分割処理部で抽出した各々の交点の座標を前記データベースに登録した各々のランドマークの前記関数に代入し、ランドマークのパターン情報に変換することを特徴とするランドマーク認識装置。 - 周囲の画像を取得してランドマークを認識するランドマーク認識方法であって、
前記取得した画像のうち前記ランドマークを含む領域の情報であるランドマーク抽出情報と、前記ランドマークのパターンの特徴を示すランドマークパターン情報を数値情報として得るための関数と、該関数により算出した数値を評価する判定条件式をランドマーク判定条件情報として、ランドマークの種類毎に組として備え、
前記取得した画像について、前記ランドマークを含む領域を検知し、当該領域の前記ランドマーク抽出情報を含む前記組を特定し、特定した当該組の前記関数を実施し、特定した当該組の前記ランドマーク判定条件情報と比較することによりランドマークを認識するランドマーク認識方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015169373 | 2015-08-28 | ||
| JP2015169373 | 2015-08-28 | ||
| PCT/JP2016/059797 WO2017038134A1 (ja) | 2015-08-28 | 2016-03-28 | ランドマーク認識装置及び認識方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2017038134A1 JPWO2017038134A1 (ja) | 2018-05-31 |
| JP6560355B2 true JP6560355B2 (ja) | 2019-08-14 |
Family
ID=58188278
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017537566A Active JP6560355B2 (ja) | 2015-08-28 | 2016-03-28 | ランドマーク認識装置及び認識方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10509971B2 (ja) |
| JP (1) | JP6560355B2 (ja) |
| WO (1) | WO2017038134A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6628189B2 (ja) * | 2016-05-19 | 2020-01-08 | パナソニックIpマネジメント株式会社 | 検出装置および検出方法 |
| US10962982B2 (en) * | 2016-07-21 | 2021-03-30 | Mobileye Vision Technologies Ltd. | Crowdsourcing the collection of road surface information |
| JP6970736B2 (ja) * | 2017-03-29 | 2021-11-24 | パイオニア株式会社 | 劣化地物特定装置、劣化地物特定方法、劣化地物特定プログラム及び劣化地物特定プログラムを記録したコンピュータ読み取り可能な記録媒体 |
| JP2020523660A (ja) * | 2017-06-14 | 2020-08-06 | モービルアイ ビジョン テクノロジーズ リミテッド | 自律走行に関する走行情報のフレームワークとバッチ調整との結合 |
| CN109389024B (zh) * | 2018-01-30 | 2020-09-04 | 长城汽车股份有限公司 | 基于影像识别路锥的方法、装置、存储介质以及车辆 |
| US20190286921A1 (en) * | 2018-03-14 | 2019-09-19 | Uber Technologies, Inc. | Structured Prediction Crosswalk Generation |
| KR102564856B1 (ko) * | 2018-09-07 | 2023-08-08 | 삼성전자주식회사 | 차선을 검출하는 방법 및 장치 |
| US20220189302A1 (en) * | 2019-03-19 | 2022-06-16 | ClearMotion, Inc. | Vehicular localization systems, methods, and controls |
| US11265480B2 (en) * | 2019-06-11 | 2022-03-01 | Qualcomm Incorporated | Systems and methods for controlling exposure settings based on motion characteristics associated with an image sensor |
| CN112801012B (zh) * | 2021-02-05 | 2021-12-17 | 腾讯科技(深圳)有限公司 | 交通元素的处理方法、装置、电子设备及存储介质 |
| CN113283361B (zh) * | 2021-06-02 | 2022-08-12 | 广东电网有限责任公司广州供电局 | 一种绝缘层破损识别模型训练方法、识别方法和装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3319383B2 (ja) | 1998-03-11 | 2002-08-26 | 株式会社豊田中央研究所 | 走行路認識装置 |
| JP4820712B2 (ja) * | 2005-08-05 | 2011-11-24 | アイシン・エィ・ダブリュ株式会社 | 路面標示認識システム |
| JP5836774B2 (ja) * | 2011-11-28 | 2015-12-24 | 三菱電機株式会社 | 俯瞰映像生成装置、俯瞰映像生成方法、映像表示システムおよびナビゲーション装置 |
| JP2013186664A (ja) | 2012-03-07 | 2013-09-19 | Toyota Motor Corp | 横断歩道認識装置および横断歩道認識方法 |
| JP6012446B2 (ja) * | 2012-12-12 | 2016-10-25 | 三菱電機株式会社 | 運転支援装置、運転支援制御装置および運転支援制御方法 |
-
2016
- 2016-03-28 US US15/753,767 patent/US10509971B2/en active Active
- 2016-03-28 WO PCT/JP2016/059797 patent/WO2017038134A1/ja active Application Filing
- 2016-03-28 JP JP2017537566A patent/JP6560355B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2017038134A1 (ja) | 2017-03-09 |
| US10509971B2 (en) | 2019-12-17 |
| US20180247139A1 (en) | 2018-08-30 |
| JPWO2017038134A1 (ja) | 2018-05-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6560355B2 (ja) | ランドマーク認識装置及び認識方法 | |
| US11270131B2 (en) | Map points-of-change detection device | |
| KR101241651B1 (ko) | 영상 인식 장치 및 그 방법, 영상 기록 장치 또는 그방법을 이용한 위치 판단 장치, 차량 제어 장치 및네비게이션 장치 | |
| CN110530372B (zh) | 定位方法、路径确定方法、装置、机器人及存储介质 | |
| JP4363295B2 (ja) | ステレオ画像による平面推定方法 | |
| US20100259609A1 (en) | Pavement marker recognition device, pavement marker recognition method and pavement marker recognition program | |
| JP2011511281A (ja) | センサにより検出されたオブジェクトとマップマッチングする方法 | |
| JP6822427B2 (ja) | 地図変化点検出装置 | |
| JP2007303841A (ja) | 車両位置推定装置 | |
| US10846546B2 (en) | Traffic signal recognition device | |
| KR20080024776A (ko) | 호프 변환을 이용한 주차구획 인식 방법, 장치 및 그를이용한 주차 보조 시스템 | |
| JP2012159469A (ja) | 車両用画像認識装置 | |
| JP2017078607A (ja) | 車両位置推定装置及びプログラム | |
| JP2018147393A (ja) | 標識認識システム | |
| JP2015194397A (ja) | 車両位置検出装置、車両位置検出方法及び車両位置検出用コンピュータプログラムならびに車両位置検出システム | |
| JP2017174197A (ja) | 立体物検出方法及び立体物検出装置 | |
| WO2011039977A1 (ja) | 横断歩道標示検出方法および横断歩道標示検出装置 | |
| US10133940B2 (en) | Road surface undulation estimation device and road surface undulation estimation method | |
| JP2002334330A (ja) | 車両認識装置 | |
| JP5974923B2 (ja) | 道路端検出システム、方法およびプログラム | |
| JP2012150595A (ja) | 一時停止線検出装置及びプログラム | |
| JP2012215442A (ja) | 自位置特定システム、自位置特定プログラム及び自位置特定方法 | |
| JP5888275B2 (ja) | 道路端検出システム、方法およびプログラム | |
| KR20160125803A (ko) | 영역 추출 장치, 물체 탐지 장치 및 영역 추출 방법 | |
| JP6477340B2 (ja) | 道路境界検出装置、自己位置推定装置及び道路境界検出方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180209 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190416 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190520 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190709 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190718 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6560355 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |