JP6549839B2 - Operation system - Google Patents
Operation system Download PDFInfo
- Publication number
- JP6549839B2 JP6549839B2 JP2014247821A JP2014247821A JP6549839B2 JP 6549839 B2 JP6549839 B2 JP 6549839B2 JP 2014247821 A JP2014247821 A JP 2014247821A JP 2014247821 A JP2014247821 A JP 2014247821A JP 6549839 B2 JP6549839 B2 JP 6549839B2
- Authority
- JP
- Japan
- Prior art keywords
- user
- control device
- touch sensor
- sight
- line
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images

















Description
本発明は、操作システムに関する。 The present invention relates to an operation system.
従来のタッチパネルは、ユーザの操作によってタッチパネル自体が物理的に変位しないため、操作に対するフィードバックがなく、ユーザは操作感を得ることができなかった。このため、ユーザの操作があった際にタッチパネルを振動させて、操作に対するフィードバックをユーザに与える技術が知られている。なお、本発明と関連する技術としては、例えば特許文献1がある。
In the conventional touch panel, since the touch panel itself is not physically displaced by the operation of the user, there is no feedback for the operation, and the user can not obtain a feeling of operation. For this reason, there is known a technique of vibrating the touch panel when there is an operation of the user to give feedback to the operation to the user. In addition, there exists
ところで、操作内容を示す表示画面とタッチセンサとが別の電子機器である場合には、フィードバックを与えることによってブラインドでの操作が可能になる。例えば、車両に用いた場合には、表示画面を前方にすることで運転中でも前方視界から目を離さずにタッチセンサの操作が可能になるという効果が期待できる。しかしながら、ドライバが自身の意思で又は無意識の内にタッチセンサを見てしまう可能性もあり、この場合には安全面での問題が生じることが懸念される。 By the way, when the display screen which shows the content of operation, and a touch sensor are another electronic devices, operation by a blind is attained by giving feedback. For example, when it is used for a vehicle, it can be expected that by turning the display screen forward, the touch sensor can be operated even while driving without keeping an eye on the front view. However, there is also a possibility that the driver sees the touch sensor at his own intention or involuntarily, and in this case, there is a concern that safety problems may occur.
本発明は、上記課題に鑑みてなされたものであり、ユーザがタッチセンサを操作する際に安全面での問題が生じることを回避することが可能な技術を提供することを目的とする。 The present invention has been made in view of the above problems, and an object of the present invention is to provide a technology capable of avoiding the occurrence of a safety problem when a user operates a touch sensor.
上記課題を解決するため、請求項1の発明は、車両に搭載される操作システムであって、前記車両のユーザが操作可能な位置に配置されたタッチセンサと、前記車両の前方方向であって、前記タッチセンサとは異なる箇所に操作画面を表示する表示装置と、前記ユーザの視線を検出する視線検出装置と、を備え、ユーザの視線が、前記タッチセンサが配置されている領域外の、前記操作画面が表示されている領域内にある場合には、前記タッチセンサへの操作を有効にする操作システムである。
In order to solve the above-mentioned subject, invention of
また、請求項2の発明は、請求項1に記載の操作システムにおいて、前記タッチセンサには、ユーザに対して触感を付与する触感付与手段が設けられている。
In the second aspect of the present invention, in the operation system according to the first aspect, the touch sensor is provided with a tactile sense giving means for giving a tactile sense to the user.
また、請求項3の発明は、請求項1に記載の操作システムにおいて、前記車両が停車している場合には、ユーザの視線が、前記操作画面が表示されている領域内にない場合でも、前記タッチセンサへの操作の無効化を行わない。また、請求項4の発明は、請求項1に記載の操作システムにおいて、前記表示装置は、ユーザの略正面のフロントガラス部分に、前記操作画面を投影して表示させるヘッドアップディスプレイ装置である。
In the third aspect of the present invention, in the operation system according to the first aspect, when the vehicle is stopped, the line of sight of the user is not within the area where the operation screen is displayed. The operation to the touch sensor is not invalidated. The invention according to claim 4 is the head-up display device according to
請求項1ないし4の発明によれば、ユーザの視線に応じてタッチセンサを有効又は無効にするため、車両のユーザが操作する場合においても安全面での問題が生じることを回避することが可能になる。
According to the first to fourth aspects of the invention, since the touch sensor is enabled or disabled according to the line of sight of the user, it is possible to prevent the occurrence of a problem in safety even when the user of the vehicle operates. become.
以下、図面を参照しつつ本発明の実施の形態について説明する。 Hereinafter, embodiments of the present invention will be described with reference to the drawings.
<1.第1の実施の形態>
<1−1.システムの概要>
図1及び図2は、操作システム1の概要を示す図である。本実施の形態では、自動車などの車両に搭載された操作システム1を例に用いて説明する。図1は、操作システム1が搭載される車両の車室内の様子を示す図である。図2は、操作システム1の概略構成を示す図である。
<1. First embodiment>
<1-1. System Overview>
1 and 2 are diagrams showing an overview of the
図1及び図2に示すように、操作システム1は、制御装置10と、遠隔操作装置20と、ヘッドアップディスプレイ装置(以下「HUD装置」と記載する)30と、視線検出装置40とを備えている。制御装置10は、遠隔操作装置20、HUD装置30及び視線検出装置40の各々と電気的に接続されており、各装置との間で信号の送受信が可能である。
As shown in FIGS. 1 and 2, the
制御装置10は、車両に設けられた他の装置(例えば遠隔操作装置20等)を制御する。本実施の形態では、ユーザ(代表的にはドライバ)の視線に応じて遠隔操作装置20の動作状態を制御するようになっており、制御装置10はこのような制御を行う。
遠隔操作装置20は、タッチセンサを備えた操作装置であり、車両のセンターコンソールのユーザの手の届く範囲に設けられている。そして、この遠隔操作装置20を用いた操作内容を示す画像は、HUD装置30にて表示される。操作システム1では、ユーザはHUD装置30が表示した画面を見ながら手元の遠隔操作装置20を操作するようになっている。つまり、操作システム1は、操作する手元を見ることなく(ブラインドで)、遠隔での操作が可能なシステムである。
The
さらに、ユーザが遠隔操作装置20のタッチセンサを操作すると、タッチセンサが振動する。これにより、ユーザは触感を得ることができるようになっており、すなわち操作に対するフィードバックを得ることができる。
Furthermore, when the user operates the touch sensor of the
HUD装置30は、ユーザの略正面のフロントガラス部分に画像を投影する装置である。ユーザは、このHUD装置30が投影した画面を見ながら遠隔操作装置20のタッチセンサを操作する。
The
また、視線検出装置40は、ユーザの視線を検出する装置である。視線検出装置40は、例えばカメラでユーザの顔を撮影し、その画像を解析することでユーザの視線を検出する。視線検出装置40が検出したユーザの視線情報は、制御装置10が遠隔操作装置20の動作状態を制御する際に用いられる。
Also, the sight
このように、操作システム1は、タッチセンサと表示画面とが異なる位置にあり、ユーザが遠隔で操作可能なシステムであって、ユーザの視線方向に応じてタッチセンサの動作状態を制御するシステムである。以下、各構成の具体的な内容について説明する。
As described above, the
<1−2.システムの構成>
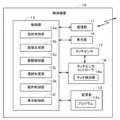
操作システム1の具体的な構成について図3ないし図7を用いて説明する。まず、制御装置10の構成について説明する。図3は、制御装置10の概略構成を示す図である。図3に示すように、制御装置10は、通信部11、記憶部12、及び、制御部13を備えている。
<1-2. System configuration>
The specific configuration of the
通信部11は、Wi−Fi(ワイファイ:登録商標)等による無線通信により遠隔操作装置20と通信可能に接続され、遠隔操作装置20との間で各種データの送受信を行う。また、通信部11は、CAN(Controller Area Network)等の車載LAN(Local Area Network)を介してHUD装置30及び視線検出装置40の各装置と通信可能に接続されており、HUD装置30及び視線検出装置40の各装置と各種データの送受信を行う。なお、これらの接続は一例であり、有線及び無線のいずれであってもよい。
The
記憶部12は、電気的にデータの読み書きが可能であって、電源を遮断されていてもデータが消去されない不揮発性の半導体メモリである。記憶部12としては、例えば、EEPROM(Electrical Erasable Programmable Read-Only memory)やフラッシュメモリを用いることができる。ただし、他の記憶媒体を用いてもよく、磁気ディスクを備えたハードディスクドライブで構成することもできる。記憶部12には、プログラム12aなどが記憶されている。プログラム12aは、制御部13により読みだされ、制御部13が制御装置10を制御するために実行される、いわゆるシステムソフトウェアである。
The
制御部13は、例えば、CPU、RAM、及びROMなどを備えるマイクロコンピュータであり、主として制御装置10や遠隔操作装置20などを制御する。制御部13のCPUが記憶部12に記憶されたプログラム12aを実行する(プログラム12aに従った演算処理を行う)ことにより、制御部13として必要な各種の機能が実現される。
The
図3に示す操作判別部13a、画像生成部13b、振動制御部13c、視線判定部13d及び動作制御部13eは、プログラム12aの実行により実現される制御部13の機能のうちの一部である。
The
操作判別部13aは、ユーザの操作内容を判別する。具体的には、操作判別部13aは、遠隔操作装置20からユーザがタッチした位置の情報を取得して、この位置情報に基づいてユーザが遠隔操作装置20を操作したことや、ジェスチャーなどの操作内容を判別する。例えば、操作判別部13aは、遠隔操作装置20から取得した時間的に連続する位置情報をつないだ結果に基づいてユーザのジェスチャーを判別する。
The
画像生成部13bは、HUD装置30が投影する画像データを生成し、通信部11を介してHUD装置30に送信する。例えば、ユーザが遠隔操作装置20を操作してエアコンやオーディオなどの設定の調整指示を入力すると、画像生成部13bは、対応する調整画像のデータを生成してHUD装置30に送信する。これにより、HUD装置30は、対応する調整画像を投影して表示することになる。
The
振動制御部13cは、操作判別部13aの判別結果に応じて遠隔操作装置20のタッチセンサの振動を制御する。具体的には、振動制御部13cは、ユーザが遠隔操作装置20を操作すると、後述する振動素子を振動させる。例えば、振動制御部13cは、振動素子を一定の強度で振動させたり、一定の周期で強弱を変化させながら振動させる等の制御を行う。
The
視線判定部13dは、ユーザの視線が、HUD装置30が投影した画像の方向を向いているか否かを判定する。具体的には、視線判定部13dは、視線検出装置40が検出した視線の情報を取得し、その視線方向とHUD装置30の投影画面の位置とを比較して判定する。
The
動作制御部13eは、ユーザの視線に応じて遠隔操作装置20の動作状態を制御する。例えば、ユーザの視線がHUD装置30の投影画面の方向を向いている場合に、動作制御部13eが遠隔操作装置20の操作を有効にする等である。
The
次に、遠隔操作装置20の構成について説明する。図4は、遠隔操作装置20の概略構成を示す図である。図4に示すように、遠隔操作装置20は、タッチセンサ21、タッチセンサコントローラ22、通信部23、及び、振動素子24を備えている。
Next, the configuration of the
なお、遠隔操作装置20は、表示機能を有していないため、いわゆるタッチパッドとして機能する。また、遠隔操作装置20のタッチセンサ21の位置と、HUD装置30による投影画面の位置とが対応付けられており、ユーザはHUD装置30によって投影された画面を見ながらタッチセンサ21を操作することができるようになっている。
Since the
タッチセンサ21は、ユーザが入力操作を行う平板状のセンサーである。なお、遠隔操作装置20自身は表示機能を有しておらず、タッチセンサ21はいわゆるタッチパッドとして機能する。例えば、HUD装置30の投影画面に表示されたコマンドボタンに対応するタッチセンサ21上の領域を指でタッチすると、コマンドボタンに関連付けられた指示を行うことができる。
The
タッチセンサ21の方式としては、例えば、静電容量の変化を捉えて位置を検出する静電容量方式を採用することができる。ユーザは、タッチセンサ21の操作面に対して、一点でタッチする操作のみならず、複数点でタッチする操作であるマルチタッチを行うことも可能になっている。
As a method of the
タッチセンサコントローラ22は、例えば、ハードウェア回路であり、タッチセンサ21の動作を制御する。タッチセンサコントローラ22は、タッチセンサ21で生じた信号に基づいて、タッチセンサ21の操作面中のユーザがタッチした位置を検出するタッチ検出部22aを備えている。
The
タッチ検出部22aは、例えば、駆動電極及び受信電極の2電極間の静電容量の変化を測定する相互容量方式で、ユーザがタッチした位置(例えばXY座標)を検出する。タッチ検出部22aは、ユーザの指での電界の遮断によって受信電極が受信する電荷が減少することに基づいて、ユーザがタッチしたか否かを検出する。
The
タッチ検出部22aは、タッチセンサ21の操作面に、ユーザが一点及び複数点のいずれでタッチしたかを判別することができる。そして、タッチ検出部22aは、タッチセンサ21の操作面にユーザが一点でタッチした場合にはその一点の位置を検出し、ユーザが複数点でタッチした場合にはその複数点のそれぞれの位置を検出する。
The
通信部23は、Wi−Fi(ワイファイ:登録商標)等による無線通信により制御装置10と通信可能に接続され、制御装置10との間で各種データの送受信を行う。例えば、通信部23は、タッチ検出部22aで検出したユーザがタッチした位置情報(例えばXY座標)を制御装置10に送信し、制御装置10から振動素子24を振動させる制御信号(以下「振動制御信号」という)を受信する。
The
振動素子24は、タッチセンサ21の操作面を振動させる部材である。振動素子24は、図5に示すように、タッチセンサ21の操作面の周囲に複数配置されている。そして、この振動素子24自身が振動することでタッチセンサ21の操作面を振動させる。振動素子24は、制御装置10からの振動制御信号に基づいて振動する。この振動素子24としては、例えば、ピエゾ素子などの圧電素子を用いることができる。
The vibrating
このように、振動素子24が振動してタッチセンサ21を振動させることでタッチセンサ21を操作しているユーザに対して触感を与えることができる。すなわち、操作に対するフィードバックを与えることができる。
As described above, when the
次に、HUD装置30の構成について説明する。図6は、HUD装置30の概略構成を示す図である。図6に示すように、HUD装置30は、信号受信部31、画像処理部32、プロジェクタ33、及び、制御部34を備えている。
Next, the configuration of the
信号受信部31は、制御装置10から画像データを受信する。例えば、ユーザが遠隔操作装置30のタッチセンサ21を操作してエアコンやオーディオ等の設定を調整する指示を入力すると、制御装置10から対応する調整画像のデータを受信する。
The
画像処理部32は、信号受信部31が受信した画像データに対して表示に必要な処理を行い、処理後の画像データをプロジェクタ33に出力する。
The
プロジェクタ33は、例えば、DLP(登録商標)やLCOSなどの方式を用いて、画像データの画像を示す投影光をレンズから照射し、フロントガラスや専用のスクリーンに投影して画像を表示させる。
The
制御部34は、例えば、CPU、RAM及びROMなどを備えるマイクロコンピュータであり、HUD装置30全体を統括的に制御する。
The
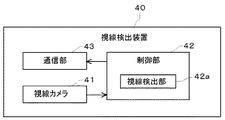
次に、視線検出装置40の構成について説明する。図7は、視線検出装置40の概略構成を示す図である。図7に示すように、視線検出装置40は、視線カメラ41、制御部42、及び、通信部43を備えている。
Next, the configuration of the sight
視線カメラ41は、視線検出用のカメラであり、ユーザの顔(特に目)を写すためのカメラである。したがって、この視線カメラ41は、被写体となるユーザ(ドライバ)の略正面のインストルメントパネル付近に設けられている。視線カメラ41としては、視線検出に用いることができるものであれば特に限定されるものではなく、可視光カメラや赤外線カメラを用いることができる。なお、赤外線カメラを用いる場合には、赤外線LEDなどを別途設け、ユーザの顔に赤外光を照射した状態で撮影する。
The line-of-
制御部42は、例えば、CPU、RAM及びROMなどを備えるマイクロコンピュータであり、視線検出装置40全体を統括的に制御する。制御部42は、視線カメラ41の撮影データを用いてユーザの視線を検出する視線検出部42aを備えている。
The
視線検出部42aは、例えば、視線カメラ41で撮影した撮影データの中からユーザの目に該当する画像データを抽出する。そして、目に該当する画像データの中から動きのない点と、動きのある点とを抽出する。そして、視線検出部42aは、これら各点の位置関係に基づいてユーザの視線を検出する。なお、視線の検出方法については後述する。
The visual
通信部43は、CAN等の車載LANを介して制御装置10と通信可能に接続されており、制御装置10と各種データの送受信を行う。例えば、視線検出装置40は、視線検出部42aで検出した視線情報を、通信部43を介して制御装置10に送信する。
The
<1−3.触感の発生方法と種類>
ここで、タッチセンサ21を振動させることによって触感を発生させる方法と、触感の種類について説明する。
<1-3. How to generate tactile sensation>
Here, a method of generating a tactile sensation by vibrating the
図5は、タッチセンサ21を模式的に表した図である。上述したように、タッチセンサ21の周囲には、複数の振動素子24が配置されている。なお、本実施の形態では、対向する2辺に並べて配置しているが、これに限定されるものではなく、任意の辺に任意の数の振動素子24を配置すればよい。
FIG. 5 is a view schematically showing the
触感を発生させるためには、まず制御装置10からの振動制御信号に基づいて振動素子24を高速で振動させる。この高速での振動とは例えば超音波振動である。振動素子24を超音波振動させることでタッチセンサ21の表面を超音波振動させることができる。図5に示すような対向する2辺に配置した振動素子24を振動させればタッチセンサ21全面を略均一に振動させることができる。
In order to generate a tactile sensation, first, the vibrating
タッチセンサ21表面が超音波振動した状態でタッチセンサ21表面を指で操作すると、指と高速で振動しているタッチセンサ21表面との間に高圧の空気膜が発生して摩擦抵抗が減少する。これにより、ユーザは、振動していない状態に比べてツルツルと滑らかにすべる触感(以下「ツルツル感」という)を得ることができる。
When the surface of the
また、タッチセンサ21表面を超音波振動させた状態のときに振動素子24の振動を停止させると、タッチセンサ21表面の超音波振動も停止する。すると、タッチセンサ21表面の摩擦抵抗は、減少していた状態から本来の状態(振動していない状態)に戻る。すなわち、低摩擦の状態から高摩擦の状態に変化する。この場合、ツルツル感のあった触感からひっかかりの感じる触感に変化する。ユーザは、このツルツル感からひっかかりの感じる触感に変化する際にカチッとした触感を得ることができる。このカチッとした触感を以下においては「クリック感」という。
In addition, when the vibration of the vibrating
また、振動素子24の振動強度に変化をつけてタッチセンサ21表面を超音波振動させると、タッチセンサ21表面を相対的に大振幅で振動させたり小振幅で振動させたりすることが可能になる。これにより、タッチセンサ21表面を高摩擦状態と低摩擦状態とが繰り返された状態にすることができる。つまり、ユーザは、ツルツル感とクリック感とを交互に触感として感じることになり、この場合凸凹した触感やザラザラした触感(以下「ザラザラ感」という)を得ることができる。
In addition, when the vibration intensity of the
また、振動の強弱の大きさを変えたり、強弱を変化させる周期を変えることでザラザラ度合いを変化させることができる。これにより、ザラザラ度合いの強いザラザラ感や弱いザラザラ感、またザラザラ感の疎密度感など、段階的に複数種類のザラザラ感を実現することが可能になる。 In addition, the degree of roughness can be changed by changing the magnitude of vibration strength or changing the cycle of changing the strength. As a result, it is possible to realize a plurality of types of rough feeling stepwise, such as a rough feeling with a rough degree, a weak feeling, and a sparse feeling of rough feeling.
このように、本実施の形態では、振動素子24を超音波振動させてタッチセンサ21表面を超音波振動させることで、ユーザに対して触感を与えることができる。また、超音波振動の開始や停止のタイミング、強弱などを適宜制御すれば、その表面の摩擦抵抗を変化させることができ、それを利用することで種々の触感を与えることが可能になっている。
As described above, in the present embodiment, it is possible to give the user a tactile sensation by ultrasonically vibrating the vibrating
<1−4.視線の検出と動作状態の制御>
次に、ユーザの視線を検出する処理について説明する。本実施の形態では、上述したように、カメラを用いて撮影した画像データからユーザの視線を検出している。以下、具体的に説明する。
<1-4. Detection of eye gaze and control of movement state>
Next, the process of detecting the line of sight of the user will be described. In the present embodiment, as described above, the line of sight of the user is detected from image data captured using a camera. The details will be described below.
視線検出装置40は、既存のアルゴリズムを用いて、視線カメラ41で撮影した画像データに含まれる人間の顔や目を抽出する。これら既存のアルゴリズムとしては、顔のパーツの形や大きさ、相対位置などを元にして認識するものや、テンプレートマッチングにより認識するもの、3次元の輪郭などの特徴を抽出するものなど、種々のものを用いることができる。
The
そして、視線検出装置40は、目に該当する画像データの中から動きのない点を基準点として設定し、動きのある点を動点として設定する。視線カメラ41として可視光カメラを用いた場合には、例えば、目頭を基準点として設定し、虹彩を動点として設定する。そして、視線検出部42aが、虹彩と目頭との位置関係に基づいてユーザの視線を検出する。つまり、ユーザがいずれの方向を見ているかを検出する。例えば、左目の虹彩が目頭から離れていれば、ユーザは左側を見ている等である。
Then, the line-of-
また、視線カメラ41として赤外線カメラを用いた場合には、例えば、赤外光を照射してできた反射光の角膜上の位置(角膜反射)を基準点として設定し、瞳孔を動点として設定する。そして、視線検出部42aが、角膜反射と瞳孔との位置関係に基づいてユーザの視線を検出する。つまり、ユーザがいずれの方向を見ているかを検出する。例えば、左目の角膜反射よりも瞳孔が目じり側にあれば、ユーザは左側を見ている等である。
When an infrared camera is used as the line-of-
視線検出装置40は、視線を検出すると、その情報を制御装置10に送信する。そして、制御装置10は、視線情報を受信するとその情報に基づいて遠隔操作装置20の動作状態を制御するようになっている。そこで、以下において、制御装置10による遠隔操作装置20の動作状態の制御について説明する。
When the sight
制御装置10は、視線検出装置40から視線情報を受信すると、視線判定部13dが、HUD装置30によって投影された画像が表示される領域(以下「投影画面領域」という)内にユーザの視線が含まれているか否かを判定する。投影画面領域の位置は予め定められているため、視線判定部13dは、視線情報に基づいて導出したユーザの視線(の延長線)が投影画面領域内にあるか否かを判定する。
When the
視線検出装置40は、所定の間隔でユーザの視線を検出している。所定の間隔とは例えば100msである。したがって、制御装置10は、視線検出装置40から100ms毎に視線情報を受信して、各視線情報毎にユーザの視線が投影画面領域内にあるか否かを判定している。
The
視線判定部13dは、ユーザの視線が投影画面領域内にあるとの判定結果が所定回数以上連続した場合に、ユーザは投影画面領域を見ていると判定する。視線判定部13dは、それ以外の場合には、ユーザは投影画面領域を見ていないと判定する。所定回数は、ユーザが投影画面領域を見ていると判定可能な回数であればよく、適宜設定可能である。
The
ユーザが投影画面領域を見ている場合には、動作制御部13eは、遠隔操作装置20の操作を有効にする。例えば、動作制御部13eが、遠隔操作装置20の電源をオンにする制御をしたり、遠隔操作装置20への操作を受け付ける制御をしたり、遠隔操作装置20から受信した操作位置の情報を有効な情報として処理する等である。
When the user is looking at the projection screen area, the
一方、ユーザが投影画面領域を見ていない場合には、動作制御部13eは、遠隔操作装置20の操作を無効にする。例えば、動作制御部13eが、遠隔操作装置20の電源をオフにする制御をしたり、遠隔操作装置20への操作を禁止する制御をしたり、遠隔操作装置20から受信した操作位置の情報を無効な情報として処理する等である。
On the other hand, when the user does not look at the projection screen area, the
<1−5.システムの処理>
次に、操作システム1の処理について説明する。図8は、視線検出装置40及び制御装置10の処理を示すフローチャートである。視線検出装置40及び制御装置10は、電源が投入されて起動することにより処理を開始する。
<1-5. System processing>
Next, processing of the
まず、視線検出装置40は、ユーザの視線を検出する(ステップS10)。これは、上述したように、視線カメラ41で撮影した画像データに基づいて視線検出部42aが基準点及び動点を設定して行う。そして、視線検出装置40は、検出した視線に関する情報(視線情報)を制御装置10に送信する(ステップS11)。
First, the
視線検出装置40は、この視線検出処理を所定の間隔で繰り返し実行する。所定の間隔とは、例えば100msであるが、これに限定されるものではない。制御装置10が、ユーザが投影画面領域を見ているか否かの判定を行うことができる程度の間隔であればよく、適宜設定可能である。なお、視線検出装置40は、電源がオフしたり、処理の停止指示があると処理を終了する。
The sight
そして、制御装置10が視線情報を受信し(ステップS20)、判定処理を実行する(ステップS21)。この判定処理は、ユーザの視線が投影画面領域内にあるか否かを判定する処理である。上述したように、投影画面領域の位置は予め定められているため、視線判定部13dは、ユーザの視線(の延長線)がこの予め定められた領域内に含まれるか否かを判定する。なお、この判定処理は、定期的に受信する全視線情報に対して実行される。
Then, the
そして、制御装置10は、ユーザの視線が投影画面領域に含まれているとの判定結果が、所定回数連続したか否かを判定する(ステップS22)。所定回数連続した場合には(ステップS22でYes)、視線判定部13dは、ユーザが投影画面を見ていると判定し、動作制御部13eが遠隔操作装置20を有効にする(ステップS23)。すなわち、動作制御部13eは、動作状態の制御として、遠隔操作装置20の電源のオンや、操作の受け付けや、遠隔操作装置20からの受信信号の有効化等を実行する。
Then, the
一方、所定回数連続していない場合には(ステップS22でNo)、視線判定部13dは、ユーザが投影画面を見ていないと判定し、動作制御部13eが遠隔操作装置20を無効にする(ステップS24)。すなわち、動作制御部13eは、動作状態の制御として、遠隔操作装置20の電源のオフや、操作の禁止や、遠隔操作装置20からの受信信号の無効化等を実行する。
On the other hand, if the user has not seen the projection screen (No at Step S22), the
このように、前方の表示画面を見ながら手元のタッチセンサを操作するような遠隔操作のシステムにおいて、ユーザが表示画面を見ているときだけタッチセンサの操作を有効にするため、安全面での問題が生じることを回避することができると共に、誤操作を低減させることができる。 As described above, in the remote control system in which the touch sensor at hand is operated while looking at the display screen in front, in order to validate the operation of the touch sensor only when the user is looking at the display screen, While being able to avoid that a problem arises, a misoperation can be reduced.
<2.第2の実施の形態>
次に、第2の実施の形態について説明する。第1の実施の形態では、ユーザの視線を検出し、ユーザが投影画面領域を見ているか否かに応じて遠隔操作装置20の動作状態を制御する内容について説明したが、これに限定されるものではない。例えば、ユーザが遠隔操作装置20を見ているか否かに応じて遠隔操作装置20自身の動作状態を制御する内容としてもよい。以下においては、この内容について第1の実施の形態と異なる点を中心に説明する。
<2. Second embodiment>
Next, a second embodiment will be described. In the first embodiment, the content of detecting the line of sight of the user and controlling the operation state of the
<2−1.構成>
図9は、本実施の形態にかかる操作システム2の概略構成を示す図である。図9に示すように、操作システム2は、第1の実施の形態で説明した操作システム1と略同様の構成を有しており、制御装置14、遠隔操作装置20、HUD装置30及び視線検出装置40を備えている。このうち、遠隔操作装置20、HUD装置30及び視線検出装置40は、第1の実施の形態の各装置と同様の構成である。
<2-1. Configuration>
FIG. 9 is a view showing a schematic configuration of the
そこで、制御装置14の構成について第1の実施の形態との相違点を中心に図10を用いて説明する。図10は、制御装置14の概略構成を示す図である。
Therefore, the configuration of the
図10に示すように、制御装置14は、通信部11、記憶部12、及び、制御部13を備えている。このうち、通信部11及び記憶部12は、第1の実施の形態の各部と同様の構成である。また、制御部13のうち、操作判別部13a、画像生成部13b及び振動制御部13cの機能は、第1の実施の形態で説明した各機能と同様である。これに対して、視線判定部13f及び動作制御部13gの機能が、第1の実施の形態で説明した各機能と相違する。このため、以下においては、視線判定部13f及び動作制御部13gについて説明する。
As shown in FIG. 10, the
第1の実施の形態の視線判定部13dは、ユーザの視線が投影画面領域内に含まれるか否かを判定するのに対して、本実施の形態の視線判定部13fは、ユーザの視線が遠隔操作装置20のタッチセンサ21が配置された領域(以下「タッチセンサ領域」という)に含まれるか否かを判定する。
The line-of-
また、第1の実施の形態の動作制御部13eは、ユーザが投影画面領域を見ている場合に遠隔操作装置20を有効にし、見ていない場合に無効にするのに対して、本実施の形態の動作制御部13gは、ユーザがタッチセンサ領域を見ている場合に遠隔操作装置20を無効にし、見ていない場合に有効にする。
Further, the
<2−2.処理>
次に、本実施の形態の操作システム2の処理について説明する。図11は、本実施の形態にかかる操作システム2の処理を示すフローチャートである。
2-2. Processing>
Next, processing of the
図11に示すように、まず、視線検出装置40がユーザの視線を検出し(ステップS10)、その結果としての視線情報を制御装置14に送信する(ステップS11)。これらの処理は、第1の実施の形態と同様の処理である。
As shown in FIG. 11, first, the visual
そして、制御装置14は、視線情報を受信すると(ステップS30)、判定処理を実行する(ステップS31)。この判定処理は、ユーザの視線がタッチセンサ領域内にあるか否かを判定する処理である。本実施の形態においても、タッチセンサ領域の位置が予め定められており、視線判定部13fは、ユーザの視線(の延長線)がこのタッチセンサ領域内に含まれるか否かを判定する。なお、この判定処理は、定期的に受信する全視線情報に対して実行される。
And control
次に、制御装置14は、ユーザの視線がタッチセンサ領域内にあるとの判定結果が所定回数連続したか否かを判定する(ステップS32)。所定回数連続した場合には(ステップS32でYes)、視線判定部13fは、ユーザがタッチセンサ領域を見ていると判定し、動作制御部13gが遠隔操作装置20を無効にする(ステップS33)。すなわち、動作制御部13gは、動作状態の制御として、遠隔操作装置20の電源のオフや、操作の禁止や、遠隔操作装置20からの受信信号の無効化等を実行する。
Next, the
一方、所定回数連続していない場合には(ステップS32でNo)、視線判定部13fでは、ユーザがタッチセンサ領域を見ていないと判定し、動作制御部13gが遠隔操作装置20を有効にする(ステップS34)。すなわち、動作制御部13gは、動作状態の制御として、遠隔操作装置20の電源のオンや、操作の受け付けや、遠隔操作装置20からの受信信号の有効化等を実行する。
On the other hand, when not continuing for a predetermined number of times (No in step S32), the
以上のように、ユーザがタッチセンサ領域を見ている場合には、ユーザであるドライバが前方視界から目を離していることを示しているため、タッチセンサ21の操作を有効にすると安全面の問題が懸念される。そこで、本実施の形態では、ユーザがタッチセンサ21を見ている場合には、タッチセンサ21の動作状態を無効にし、見ていない場合に有効にするような制御を行っている。
As described above, when the user is looking at the touch sensor area, it indicates that the driver who is the user is looking away from the front view. The problem is concerned. Therefore, in the present embodiment, when the user is looking at the
これにより、前方の表示画面を見ながら手元のタッチセンサを操作するような遠隔操作のシステムにおいて、ユーザがタッチセンサを見ていないときだけタッチセンサの操作を有効にするため、安全面での問題が生じることを回避することができると共に、誤操作を低減させることができる。 As a result, in a remote control system in which the touch sensor at hand is operated while looking at the front display screen, the operation of the touch sensor is enabled only when the user is not looking at the touch sensor, which causes a problem in safety. Can be avoided and erroneous operation can be reduced.
<3.第3の実施の形態>
次に、第3の実施の形態について説明する。第1の実施の形態では、ユーザの視線を検出し、ユーザが投影画面領域を見ているか否かに応じて遠隔操作装置20の動作状態を制御する内容について説明した。本実施の形態では、他の操作装置をさらに備え、ユーザの視線に応じて遠隔操作装置20及び他の操作装置の動作状態を併せて制御する内容である。以下においては、この内容について第1の実施の形態と異なる点を中心に説明する。
<3. Third embodiment>
Next, a third embodiment will be described. In the first embodiment, the content of detecting the line of sight of the user and controlling the operation state of the
<3−1.構成>
図12は、本実施の形態に係る操作システム3が搭載される車室内の様子を示す図である。図13は、操作システム3の概略構成を示す図である。図12及び図13に示すように、操作システム3は、第1の実施の形態で説明した操作システム1とほぼ同様の構成を有しており、制御装置15、遠隔操作装置20、HUD装置30及び視線検出装置40を備えている。このうち、遠隔操作装置20、HUD装置30及び視線検出装置40は、第1の実施の形態の各装置と同様の構成である。
<3-1. Configuration>
FIG. 12 is a view showing the interior of the passenger compartment in which the
そこで、制御装置15の構成について第1の実施の形態との相違点を中心に説明する。制御装置15は、車両のセンターコンソールなどのユーザが視認可能な位置に設けられ、少なくとも表示部とタッチセンサを有する電子機器である。また、制御装置15は、遠隔操作装置20、HUD装置30及び視線検出装置40の各々と電気的に接続されており、各装置との間で信号の送受信が可能である。
Therefore, the configuration of the
図14は、制御装置15の概略構成を示す図である。図14に示すように、制御装置15は、通信部11、記憶部12、制御部13、表示部16、タッチセンサ17、及び、タッチセンサコントローラ18を備えている。このうち、通信部11及び記憶部12は、第1の実施の形態で説明した各部と同様の構成である。
FIG. 14 is a view showing a schematic configuration of the
また、制御部13のうち、操作判別部13a、画像生成部13b、振動制御部13c及び視線判定部13dは、第1の実施の形態で説明した制御部13が有する各機能と同様である。これに対して、動作制御部13hは、第1の実施の形態の動作制御部13eとは一部異なる機能であり、表示制御部13iは、本実施の形態の制御部13にて新たに実現される機能である。
Further, in the
動作制御部13hは、ユーザの視線に応じて遠隔操作装置20及びタッチセンサ17の動作状態を制御する。例えば、ユーザの視線がHUD装置30の投影画面領域の方向を見ている場合に、動作制御部13hは、遠隔操作装置20のタッチセンサ21(第1のタッチセンサ)の操作を有効にすると共にタッチセンサ17(第2のタッチセンサ)の操作を無効にする等である。
The
表示制御部13iは、エアコンやオーディオなどの設定値を調整するための調整画像を表示部16に表示させる制御を行う。また、制御装置15がナビゲーション機能を有している場合には、表示制御部13iは、地図画像やナビゲーション画像を表示部16に表示させる制御も行う。
The display control unit 13i controls the
表示部16は、調整画像や地図画像などを表示する表示装置であり、例えば液晶ディスプレイや有機EL(Electro Luminescence)ディスプレイ等である。
The
タッチセンサ17は、ユーザが操作内容を入力する平板状のセンサーである。タッチセンサ17は、表示部16の表示面上に(ユーザ側の面上に)設けられている。すなわち、表示部16及びその表示面上に設けられたタッチセンサ17がいわゆるタッチパネルとして機能する。
The
表示部16の表示面には、適宜、ユーザの指示を受け付けるコマンドボタンが表示される。ユーザは、このようなコマンドボタンの領域に対応するタッチセンサ17の操作面中の領域に指でタッチすることで、コマンドボタンに関連付けられた指示を制御装置15に行うことができる。
On the display surface of the
また、タッチセンサ17に振動素子を配置して、ユーザのタッチセンサ17の操作に応じて振動素子を振動させるようにしてもよい。振動素子が振動することでタッチセンサ17の操作面も振動してユーザに対して触感を与えることができる。タッチセンサ17の方式は、上記タッチセンサ21と同様に、例えば静電容量方式を用いることができる。
Alternatively, a vibrating element may be disposed on the
タッチセンサコントローラ18も、上記タッチセンサコントローラ22と同様の構成である。すなわち、タッチセンサコントローラ18は、タッチセンサ17で生じた信号に基づいて、タッチセンサ17の操作面中のユーザがタッチした位置を検出するタッチ検出部18aを備えており、このタッチ検出部18aが、ユーザがタッチしたか否かと、タッチした位置とを検出する。
The
<3−2.処理>
次に、本実施の形態の操作システム3の処理について説明する。図15は、本実施の形態にかかる操作システム3の処理を示すフローチャートである。
<3-2. Processing>
Next, processing of the
図15に示すように、まず、視線検出装置40がユーザの視線を検出し(ステップS10)、その結果としての視線情報を制御装置15に送信する(ステップS11)。これらの処理は、第1の実施の形態と同様の処理である。
As shown in FIG. 15, first, the visual
そして、制御装置15は、視線情報を受信すると(ステップS40)、判定処理を実行して、ユーザの視線が投影画面領域に含まれているか否かを判定する(ステップS41)。次いで、ユーザの視線が投影画面領域に含まれているとの判定結果が所定回数連続したか否かを判定する(ステップS42)。これら各処理も、第1の実施の形態の処理(ステップS20、S21及びS22)と同様の処理である。
Then, when receiving the line-of-sight information (step S40), the
そして、所定回数連続した場合には(ステップS42でYes)、視線判定部13dは、ユーザが投影画面を見ていると判定する。そして、動作制御部13hが、遠隔操作装置20を有効にする(ステップS43)と共に、制御装置15のタッチセンサ17を無効にする(ステップS44)。すなわち、動作制御部13hは、動作状態の制御として、遠隔操作装置20の電源のオンや、操作の受け付けや、遠隔操作装置20からの受信信号の有効化等を実行する。また、動作制御部13hは、動作状態の制御として、タッチセンサ17への操作の禁止や、タッチ検出部18aが取得した情報の無効化等を実行する。また、タッチセンサ17を無効にする際には、表示部16が、黒画像や白画像などのタッチセンサ17への操作ができないことをユーザに認識させる画像を表示してもよい。
Then, in the case where the predetermined number of times have been continued (Yes in step S42), the sight
一方、所定回数連続していない場合には(ステップS42でNo)、視線判定部13dは、ユーザが投影画面を見ていないと判定する。そして、動作制御部13hが、遠隔操作装置20を無効にする(ステップS45)と共に、制御装置15のタッチセンサ17を有効にする(ステップS46)。すなわち、動作制御部13hは、動作状態の制御として、遠隔操作装置20の電源のオフや、操作の禁止や、遠隔操作装置20からの受信信号の無効化等を実行する。また、動作制御部13hは、動作状態の制御として、タッチセンサ17への操作の受け付けや、タッチ検出部18aが取得した情報の有効化等を実行する。
On the other hand, if the user does not continue the predetermined number of times (No in step S42), the
このように、前方視界に表示された画面を見ながら手元のタッチセンサを操作するような遠隔操作装置と、前方視界以外の表示画面を見ながら操作する操作装置とを備えたシステムにおいても、ユーザが前方視界に表示された画面を見ているときだけ手元のタッチセンサの操作を有効にして、前方視界以外の表示画面の操作を無効にするため、安全面での問題が生じることを回避することができると共に、誤操作を低減させることができる。 As described above, even in a system provided with a remote control device that operates the touch sensor at hand while viewing the screen displayed in the front view, and an operating device that operates while viewing the display screen other than the front view Only when the user is looking at the screen displayed in the front view, the operation of the touch sensor at hand is enabled and the operation of the display screen other than the front view is nullified, thereby avoiding the problem in safety. While being able to do, it is possible to reduce erroneous operation.
<4.第4の実施の形態>
次に、第4の実施の形態について説明する。本実施の形態に係る操作システムは、ユーザの視線を検出してユーザが見ている装置に関する操作を遠隔操作装置で行うことができるようにするシステムである。
<4. Fourth embodiment>
Next, a fourth embodiment will be described. The operation system according to the present embodiment is a system that enables the remote control device to perform an operation regarding a device that the user is looking at by detecting the line of sight of the user.
<4−1.構成>
図16は、本実施の形態に係る操作システム4が搭載される車室内の様子を示す図である。図17は、操作システム4の概略構成を示す図である。図16及び図17に示すように、操作システム4は、第3の実施の形態で説明した操作システム1とほぼ同様の構成を有しており、制御装置19、遠隔操作装置20、HUD装置30及び視線検出装置40を備えている。このうち、遠隔操作装置20、HUD装置30及び視線検出装置40は、第1の実施の形態の各装置と同様の構成である。
<4-1. Configuration>
FIG. 16 is a view showing the inside of a vehicle compartment in which the operation system 4 according to the present embodiment is mounted. FIG. 17 is a view showing a schematic configuration of the operation system 4. As shown in FIGS. 16 and 17, the operation system 4 has substantially the same configuration as the
そこで、制御装置19の構成について第3の実施の形態との相違点を中心に説明する。制御装置19は、車両のセンターコンソールなどのユーザが視認可能な位置に設けられ、少なくとも表示部とタッチセンサを有する電子機器である。また、制御装置19は、遠隔操作装置20、HUD装置30及び視線検出装置40の各々と電気的に接続されており、各装置との間で信号の送受信が可能である。
Therefore, the configuration of the
図18は、制御装置19の概略構成を示す図である。図18に示すように、制御装置19は、通信部11、記憶部12、制御部13、表示部16、タッチセンサ17、及び、タッチセンサコントローラ18を備えている。このうち、制御部13以外の各部は第3の実施の形態で説明した各部と同様の構成である。
FIG. 18 is a view showing a schematic configuration of the
また、制御部13のうち、操作判別部13a、画像生成部13b、振動制御部13c及び表示制御部13iは、第3の実施の形態で説明した制御部13が有する各機能と同様である。これに対して、視線判定部13j及び動作制御部13kは、第3の実施の形態の各部とは一部異なる機能を有している。
Further, in the
視線判定部13jは、ユーザの視線方向が車両内のどの領域に含まれるのかを判定する。すなわち、ユーザが車両内のどの位置を見ているのかを判定する。また、視線判定部13jは、ユーザの視線方向に配置されている電子機器や車両設備など(以下「装置等」という)を判定する。すなわち、ユーザが見ている装置等が何であるのかを判定する。
The
具体的には、視線判定部13jは、視線検出装置40が検出した視線情報を取得すると、ユーザの視線方向が含まれる領域を判定する。そして、判定された領域と車両内の装置等の配置情報とを比較して、ユーザの視線方向に配置されている装置等を判定する。
Specifically, upon acquiring the line-of-sight information detected by the line-of-
装置等とは、例えば、表示装置やエアコン吹き出し口やオーディオ装置などである。この例の場合、例えば、センターコンソールの中央部分に相当する位置には表示装置が配置されているという情報や、ダッシュボード左側に相当する位置にはエアコンの吹き出し口50が配置されているという情報が配置情報となる。このように、配置情報は、装置等と、その装置等が配置されている車両内空間における位置とを対応付けた情報である。
The device or the like is, for example, a display device, an air conditioner outlet or an audio device. In the case of this example, for example, information that the display device is disposed at the position corresponding to the central portion of the center console, and information that the
動作制御部13kは、ユーザの視線方向に配置されている装置等の種類に応じて、遠隔操作装置20の動作状態を制御する。例えば、ユーザの視線がエアコン吹き出し口の方向を向いている場合には、動作制御部13kは、遠隔操作装置20をエアコンの設定調整が可能なモードとなるように制御する等である。
The
<4−2.処理>
次に、本実施の形態の操作システム4の処理について説明する。図19は、本実施の形態にかかる操作システム4の処理を示すフローチャートである。
<4-2. Processing>
Next, processing of the operation system 4 of the present embodiment will be described. FIG. 19 is a flowchart showing the process of the operation system 4 according to the present embodiment.
図19に示すように、まず、視線検出装置40がユーザの視線を検出し(ステップS10)、その結果としての視線情報を制御装置19に送信する(ステップS11)。これらの処理は、第1の実施の形態と同様の処理である。
As shown in FIG. 19, first, the visual
そして、制御装置19は、視線情報を受信すると(ステップS50)、領域判定処理を実行する(ステップS51)。この領域判定処理は、ユーザの視線方向に対応する車両内の領域を判定する処理である。視線判定部13jは、ユーザの視線の延長線が車両内のどの領域に含まれるかを判定する。なお、この領域判定処理は、定期的に受信する全視線情報に対して実行される。
Then, when receiving the line-of-sight information (step S50), the
そして、制御装置19は、ユーザの視線が同じ領域内にあるとの判定結果が、所定回数連続したか否かを判定する(ステップS52)。つまり、ユーザが同じ領域を一定時間見ていたか否かを判定している。所定回数連続しない場合には(ステップS52でNo)、ユーザは同じ領域を見続けていないとして処理を終了する。
Then, the
一方、所定回数連続した場合には(ステップS52)、制御装置19は、装置判定処理を実行する(ステップS53)。すなわち、視線判定部13jは、ユーザの視線が所定回数連続して含まれた領域内に存在する装置等が何であるかを判定する。すなわち、ユーザが何の装置等を見ているかを判定する。本実施の形態では、車室内のどの領域に何の装置等が配置されているかの配置情報が予め定められており、視線判定部13dは、この配置情報に基づいて、ユーザの視線方向に存在する装置等を判定する。
On the other hand, when it has continued a predetermined number of times (step S52), the
そして、制御装置19は、モード制御処理を実行する(ステップS54)。すなわち、動作制御部13kは、ユーザの視線方向に存在すると判定された装置等に対応したモードとなるように遠隔操作装置20やHUD装置30を制御する。
Then, the
例えば、視線判定部13jが、ユーザの視線がダッシュボード左側の領域にあると所定回数連続して判定した場合には、視線判定部13jは、さらに、配置情報に基づいてその領域にはエアコンの吹き出し口が存在すると判定する。すると、動作制御部13kは、遠隔操作装置20及びHUD装置30をエアコンの操作が可能なモードに制御する。具体的には、動作制御部13kのモード制御により、HUD装置30が温度調整や風量調整などの調整像を投影表示し、遠隔操作装置20がタッチセンサ21にて調整画像に対応した入力操作を受け付け可能な状態になる。すなわち、ユーザがエアコンの調整操作が可能なエアコン操作モードが起動する。
For example, when the line-of-
そして、制御装置19は、再び視線検出装置40から視線情報を受信して(ステップS55)、判定処理を実行する(ステップS56)。そして、制御装置19は、ユーザの視線が投影画面領域に含まれているとの判定結果が、所定回数連続したか否かを判定する(ステップS57)。
Then, the
そして、判定結果が所定回数連続した場合には(ステップS57でYes)、動作制御部13kが遠隔操作装置20を有効にする(ステップS58)。一方、判定結果が所定回数連続していない場合には(ステップS57でNo)、動作制御部13kが遠隔操作装置20を無効にする(ステップS59)。これら各処理は、第1の実施の形態のステップS20〜S24と同様の処理である。
When the determination result continues a predetermined number of times (Yes in step S57), the
なお、ステップS52にて所定回数連続していないと判定した場合においても、遠隔操作装置20への操作を無効にする。この場合、所定回数連続していないと判定されると、動作制御部13kは、動作状態の制御として、遠隔操作装置20の電源のオフや、操作の禁止や、遠隔操作装置20からの受信信号の無効化等を実行する。
Even when it is determined in step S52 that the operation has not been performed a predetermined number of times, the operation on the
このように、ユーザが実際に見ている装置に対応する操作モードが起動するため、ユーザは手元を見ることなく所望の装置を操作することが可能となり利便性が向上すると共に、誤操作を低減させることが可能になる。また、ユーザが表示画面を見ているときだけタッチセンサの操作を有効にするため、安全面での問題が生じることを回避することができると共に、誤操作を低減させることができる。 As described above, since the operation mode corresponding to the device actually viewed by the user is activated, the user can operate the desired device without looking at the hand, which improves convenience and reduces erroneous operations. It becomes possible. In addition, since the operation of the touch sensor is enabled only when the user is looking at the display screen, it is possible to avoid the occurrence of a problem in terms of safety, and to reduce erroneous operations.
なお、ステップS52での所定回数とステップS57での所定回数とでは、ステップS57の所定回数を多くすることが好ましい。すなわち、ユーザが投影画面領域を見ているかの決定判断の時間は、ユーザが車両内のどの領域を見ているかの決定判断の時間よりも短くすることが好ましい。また、各判断の決定時には対応する効果音を出力することが好ましい。 The predetermined number of times in step S57 is preferably increased between the predetermined number of times in step S52 and the predetermined number of times in step S57. That is, it is preferable that the time for determining whether the user is looking at the projection screen area is shorter than the time for determining which area in the vehicle the user is looking at. Further, it is preferable to output a corresponding sound at the time of determination of each determination.
また、本実施の形態においては、制御装置19がモード制御処理(ステップS54)を実行すると、遠隔操作装置20への操作を有効にする構成としてもよい。この場合、制御装置19は、図19のステップS55〜S59の処理は行わず、ユーザの操作を受け付け可能な状態となる。また、ステップS52でNoの場合には処理は終了する。
Further, in the present embodiment, when the
<5.変形例>
以上、本発明の実施の形態について説明してきたが、この発明は上記各実施の形態に限定されるものではなく様々な変形が可能である。以下では、このような変形例について説明する。上記各実施の形態及び以下で説明する形態を含む全ての形態は、適宜に組み合わせ可能である。
<5. Modified example>
As mentioned above, although embodiment of this invention was described, this invention is not limited to said each embodiment, A various deformation | transformation is possible. Below, such a modification is demonstrated. All forms including the above-described embodiments and the forms described below can be combined as appropriate.
上記各実施の形態では、操作システムは車両に搭載され、安全面での問題を回避するシステムの例について説明している。すなわち、例えば、ユーザがHUD装置の投影画面を見ていないときは遠隔操作装置への操作を無効にする等である。しかしながら、車両が停車しているときは、ユーザが遠隔操作装置を操作しても安全面に問題が生じることはないため、必ずしもこのような場合にまでも無効にする必要はない。 In each of the above embodiments, the operation system is mounted on a vehicle, and an example of a system that avoids the problem in safety is described. That is, for example, when the user does not look at the projection screen of the HUD device, the operation on the remote control device is invalidated. However, when the vehicle is at a stop, there is no problem in safety even if the user operates the remote control device, and therefore, it is not necessary to invalidate in such a case.
したがって、上記各実施の形態における操作システムは、車両が停車している場合には、遠隔操作装置への操作の無効化処理は行わない構成としてもよい。車両が停車している場合とは、例えば、車速が0の場合やパーキングブレーキがオンの場合などである。 Therefore, the operation system in each of the above embodiments may be configured so as not to perform the invalidation process of the operation on the remote control device when the vehicle is stopped. The case where the vehicle is stopped is, for example, the case where the vehicle speed is 0 or the case where the parking brake is on.
また、上記各実施の形態では、プログラムに従ったCPUの演算処理によってソフトウェア的に各種の機能が実現されると説明したが、これら機能のうちの一部は電気的なハードウェア回路により実現されてもよい。また逆に、ハードウェア回路によって実現されるとした機能のうちの一部は、ソフトウェア的に実現されてもよい。 In each of the above embodiments, it has been described that various functions are realized in software by arithmetic processing of the CPU according to a program, but some of these functions are realized by an electrical hardware circuit. May be Conversely, some of the functions implemented by the hardware circuit may be implemented as software.
1・2・3・4 操作システム
10・14・15・19 制御装置
20 遠隔操作装置
30 HUD装置
40 音声出力装置
1 · 2 · 3 · 4
Claims (4)
前記車両のユーザが操作可能な位置に配置されたタッチセンサと、
前記車両の前方方向であって、前記タッチセンサとは異なる箇所に操作画面を表示する表示装置と、
前記ユーザの視線を検出する視線検出装置と、を備え、
ユーザの視線が、前記タッチセンサが配置されている領域外の、前記操作画面が表示されている領域内にある場合には、前記タッチセンサへの操作を有効にすることを特徴とする操作システム。 An operation system mounted on a vehicle,
A touch sensor disposed at a position where the user of the vehicle can operate;
A display device that displays an operation screen at a location in front of the vehicle that is different from the touch sensor;
A gaze detection device for detecting the gaze of the user;
An operation system characterized in that when the line of sight of the user is outside the area where the touch sensor is arranged and within the area where the operation screen is displayed, the operation on the touch sensor is validated. .
前記タッチセンサには、ユーザに対して触感を付与する触感付与手段が設けられていることを特徴とする操作システム。 In the operation system according to claim 1,
The operation system according to the present invention, wherein the touch sensor is provided with a tactile sensation giving means for giving a tactile sensation to the user.
前記車両が停車している場合には、ユーザの視線が、前記操作画面が表示されている領域内にない場合でも、前記タッチセンサへの操作の無効化を行わないことを特徴とする操作システム。 In the operation system according to claim 1,
When the vehicle is stopped, the operation system is characterized in that the operation on the touch sensor is not invalidated even when the line of sight of the user is not within the area where the operation screen is displayed. .
前記表示装置は、ユーザの略正面のフロントガラス部分に、前記操作画面を投影して表示させるヘッドアップディスプレイ装置であることを特徴とする操作システム。 In the operation system according to claim 1,
The operation system characterized in that the display device is a head-up display device which projects and displays the operation screen on a windshield portion substantially in front of a user.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014247821A JP6549839B2 (en) | 2014-12-08 | 2014-12-08 | Operation system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014247821A JP6549839B2 (en) | 2014-12-08 | 2014-12-08 | Operation system |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016110424A JP2016110424A (en) | 2016-06-20 |
| JP2016110424A5 JP2016110424A5 (en) | 2018-01-18 |
| JP6549839B2 true JP6549839B2 (en) | 2019-07-24 |
Family
ID=56124341
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014247821A Active JP6549839B2 (en) | 2014-12-08 | 2014-12-08 | Operation system |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6549839B2 (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109547970A (en) * | 2017-08-11 | 2019-03-29 | 法雷奥舒适驾驶助手公司 | The method of safety is provided for the long-range control manipulation for motor vehicles |
| JP7141215B2 (en) * | 2018-01-10 | 2022-09-22 | 株式会社デンソーテン | Operation input device and touch panel |
| JP7344057B2 (en) | 2019-09-10 | 2023-09-13 | 株式会社東海理化電機製作所 | Control device, control method, and program |
| JP7194160B2 (en) * | 2020-12-08 | 2022-12-21 | 株式会社デンソーテン | Movement guidance device and movement guidance method |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5206314B2 (en) * | 2008-10-28 | 2013-06-12 | 三菱自動車工業株式会社 | Automotive electronics |
| JP2010127673A (en) * | 2008-11-26 | 2010-06-10 | Calsonic Kansei Corp | Input device for vehicle |
| JP2014164388A (en) * | 2013-02-22 | 2014-09-08 | Tokai Rika Co Ltd | Information presentation device |
| US9244527B2 (en) * | 2013-03-26 | 2016-01-26 | Volkswagen Ag | System, components and methodologies for gaze dependent gesture input control |
-
2014
- 2014-12-08 JP JP2014247821A patent/JP6549839B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016110424A (en) | 2016-06-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9346358B2 (en) | Vehicle control apparatus | |
| EP3598341B1 (en) | Implementation of biometric authentication using a viewfinder | |
| JP2019197575A (en) | System and method for controlling plural displays by using one controller and user interface which can use haptic effects | |
| JP6549839B2 (en) | Operation system | |
| JP6554131B2 (en) | Vehicle display system and method for controlling vehicle display system | |
| JPWO2015125243A1 (en) | Display control device, display control method for display control device, gaze direction detection system, and calibration control method for gaze direction detection system | |
| US20150274176A1 (en) | Moving amount derivation apparatus | |
| US10025382B2 (en) | Display system and head mounted display | |
| US20160162092A1 (en) | Operation device | |
| KR101518904B1 (en) | Vehicle operation device | |
| TWI522257B (en) | Vehicle safety system and operating method thereof | |
| JP6791108B2 (en) | Face position detector | |
| JP2012216953A (en) | Information processing apparatus, display control method, and display controller | |
| WO2018061413A1 (en) | Gesture detection device | |
| US20130187845A1 (en) | Adaptive interface system | |
| US10191548B2 (en) | Operation apparatus | |
| JP5136948B2 (en) | Vehicle control device | |
| KR101704065B1 (en) | Interaction System for Vehicles | |
| JP2006327526A (en) | Operating device of car-mounted appliance | |
| JP2014211738A (en) | On-vehicle device controller and on-vehicle device | |
| KR101510342B1 (en) | Curved display apparastus with safety button | |
| JP2017113136A (en) | Eye adjusting function support system, eye adjusting function support device, eye adjusting function support method, and control method of eye adjusting function support instrument | |
| WO2021132334A1 (en) | Tactile presentation device and tactile presentation method | |
| JP2020107030A (en) | Gesture detection apparatus and gesture detection method | |
| WO2017122508A1 (en) | Information display system and information display method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20171130 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171130 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180718 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180821 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181010 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181106 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181211 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190604 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190628 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6549839 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |