JP6527232B2 - 風力タービン、風力タービン通信システム、およびバスシステムを動作させるための方法 - Google Patents
風力タービン、風力タービン通信システム、およびバスシステムを動作させるための方法 Download PDFInfo
- Publication number
- JP6527232B2 JP6527232B2 JP2017535795A JP2017535795A JP6527232B2 JP 6527232 B2 JP6527232 B2 JP 6527232B2 JP 2017535795 A JP2017535795 A JP 2017535795A JP 2017535795 A JP2017535795 A JP 2017535795A JP 6527232 B2 JP6527232 B2 JP 6527232B2
- Authority
- JP
- Japan
- Prior art keywords
- wind turbine
- communication
- protocol
- distribution unit
- node
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L12/40006—Architecture of a communication node
- H04L12/40019—Details regarding a bus master
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L12/40052—High-speed IEEE 1394 serial bus
- H04L12/40091—Bus bridging
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L12/40143—Bus networks involving priority mechanisms
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/46—Interconnection of networks
- H04L12/4604—LAN interconnection over a backbone network, e.g. Internet, Frame Relay
- H04L12/462—LAN interconnection over a bridge based backbone
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L2012/40208—Bus networks characterized by the use of a particular bus standard
- H04L2012/40215—Controller Area Network CAN
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Cable Transmission Systems, Equalization Of Radio And Reduction Of Echo (AREA)
- Small-Scale Networks (AREA)
- Wind Motors (AREA)
- Arrangements For Transmission Of Measured Signals (AREA)
- Communication Control (AREA)
- Selective Calling Equipment (AREA)
Description
Claims (11)
- 電気的および/または電子的な構成要素(1001)と、
前記構成要素(1001)と結合されたCANノード(1100)と、
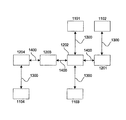
第1の通信セグメント(1300)を介して結合された前記CANノード(1100)と、標準的なCANプロトコルに相当する第1のプロトコルで通信するCAN分配ユニット(1200)と、を備え、
前記CAN分配ユニット(1200)の1つは、風力タービンのタワー向けCAN分配ユニットであり、前記CAN分配ユニット(1200)の他の1つは、前記風力タービンのナセル向けCAN分配ユニットであり、
前記CAN分配ユニット(1200)同士は、第2の通信セグメント(1400)を介して結合され、且つ、通信の遅延を許容する、前記標準的なCANプロトコルとは異なる第2のプロトコルで通信する、
風力タービン。 - 電気的および/または電子的な構成要素(1001)と、
前記構成要素(1001)と結合されたCANノード(1100)と、
前記CANノード(1100)を風力タービンの通信ネットワークに接続するCAN分配ユニット(1200)と、を備え、
前記CAN分配ユニット(1200)は、前記CANノード(1100)と、第1の通信セグメント(1300)を介して結合され、且つ、標準的なCANプロトコルに相当する第1のプロトコルで通信する一方、他の前記CAN分配ユニット(1200)と、第2の通信セグメント(1400)を介して結合され、且つ、通信の遅延を許容する、前記標準的なCANプロトコルとは異なる第2のプロトコルで通信し、
前記CAN分配ユニット(1200)の1つは、前記風力タービンのタワー向けCAN分配ユニットであり、前記CAN分配ユニット(1200)の他の1つは、前記風力タービンのナセル向けCAN分配ユニットである、
風力タービン。 - 前記第2の通信セグメント(1400)は、光回線として設計される、請求項1または2に記載の風力タービン。
- 前記第2の通信セグメント(1400)は、ポイントツーポイント接続として設計される、請求項1〜3のいずれか一項に記載の風力タービン。
- 前記CAN分配ユニット(1200)は、前記第2の通信セグメント(1400)の両端に設けられる、請求項1〜4のいずれか一項に記載の風力タービン。
- 前記第2の通信セグメント(1400)は、前記第1の通信セグメント(1300)よりも実質的に長い、請求項1〜5のいずれか一項に記載の風力タービン。
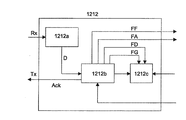
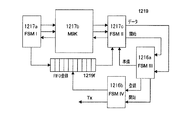
- 前記CAN分配ユニット(1200)は、それぞれ、前記CANノード(1100)と通信するためのCANインターフェイス(1210)を備える、請求項1〜6のいずれか一項に記載の風力タービン。
- 前記CANインターフェイス(1210)は、それぞれ、フレーム検出ユニット(1212)、ボーレート検出ユニット(1412a)、ボーレートジェネレータ(1214)、およびアービトレーションユニット(1218)を備える、請求項7に記載の風力タービン。
- 風力タービンの電気的および/または電子的な構成要素(1001)と結合されるCANノード(1100)と、
第1の通信セグメント(1300)を介して結合された前記CANノード(1100)と、標準的なCANプロトコルに相当する第1のプロトコルで通信するCAN分配ユニット(1200)と、を有し、
前記CAN分配ユニット(1200)の1つは、前記風力タービンのタワー向けCAN分配ユニットであり、前記CAN分配ユニット(1200)の他の1つは、前記風力タービンのナセル向けCAN分配ユニットであり、
前記CAN分配ユニット(1200)同士は、第2の通信セグメント(1400)を介して結合され、且つ、通信の遅延を許容する、前記標準的なCANプロトコルとは異なる第2のプロトコルで通信する、
風力タービン通信システム。 - 風力タービンの電気的および/または電子的な構成要素(1001)と結合されるCANノード(1100)と、
前記CANノード(1100)を前記風力タービンの通信ネットワークに接続するCAN分配ユニット(1200)と、を有し、
前記CAN分配ユニット(1200)は、前記CANノード(1100)と、第1の通信セグメント(1300)を介して結合され、且つ、標準的なCANプロトコルに相当する第1のプロトコルで通信する一方、他の前記CAN分配ユニット(1200)と、第2の通信セグメント(1400)を介して結合され、且つ、通信の遅延を許容する、前記標準的なCANプロトコルとは異なる第2のプロトコルで通信し、
前記CAN分配ユニット(1200)の1つは、前記風力タービンのタワー向けCAN分配ユニットであり、前記CAN分配ユニット(1200)の他の1つは、前記風力タービンのナセル向けCAN分配ユニットである、
風力タービン通信システム。 - 風力タービンの電気的および/または電子的な構成要素(1001)の相互通信のための方法であって、
前記構成要素(1001)をCANノード(1100)に結合するステップと、
前記CANノード(1100)とCAN分配ユニット(1200)が、第1の通信セグメント(1300)を介して、標準的なCANプロトコルに相当する第1のプロトコルで通信するステップと、
前記CAN分配ユニット(1200)同士が、第2の通信セグメント(1400)を介して、通信の遅延を許容する、前記標準的なCANプロトコルとは異なる第2のプロトコルで通信するステップと、を含み、
前記CAN分配ユニット(1200)の1つは、前記風力タービンのタワー向けCAN分配ユニットであり、前記CAN分配ユニット(1200)の他の1つは、前記風力タービンのナセル向けCAN分配ユニットである、方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102015201019.8A DE102015201019A1 (de) | 2015-01-22 | 2015-01-22 | Windenergieanlage und Windenergieanlagen-Bussystem |
| DE102015201019.8 | 2015-01-22 | ||
| PCT/EP2016/051212 WO2016116553A1 (de) | 2015-01-22 | 2016-01-21 | Windenergieanlage, windenergieanlagen-kommunikationssystem und verfahren zum betrieb eines bussystems |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018504840A JP2018504840A (ja) | 2018-02-15 |
| JP6527232B2 true JP6527232B2 (ja) | 2019-06-05 |
Family
ID=55273218
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017535795A Expired - Fee Related JP6527232B2 (ja) | 2015-01-22 | 2016-01-21 | 風力タービン、風力タービン通信システム、およびバスシステムを動作させるための方法 |
Country Status (13)
| Country | Link |
|---|---|
| US (1) | US20180006841A1 (ja) |
| EP (1) | EP3248336B1 (ja) |
| JP (1) | JP6527232B2 (ja) |
| KR (1) | KR20170105084A (ja) |
| CN (1) | CN107210944A (ja) |
| AR (1) | AR103487A1 (ja) |
| BR (1) | BR112017015733A2 (ja) |
| CA (1) | CA2972145A1 (ja) |
| DE (1) | DE102015201019A1 (ja) |
| DK (1) | DK3248336T3 (ja) |
| TW (1) | TW201644235A (ja) |
| UY (1) | UY36534A (ja) |
| WO (1) | WO2016116553A1 (ja) |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2745137B1 (fr) * | 1996-02-20 | 1998-03-13 | Commissariat Energie Atomique | Pont-routeur multiprotocoles pour reseaux industriels et systeme de communication multiprotocoles entre medias repartis sur deux postes eloignes l'un de l'autre |
| GB2351884B (en) * | 1999-04-10 | 2002-07-31 | Peter Strong | Data transmission method |
| JP2001156364A (ja) * | 1999-11-29 | 2001-06-08 | Sumitomo Electric Ind Ltd | 広帯域光増幅器 |
| US6654355B1 (en) * | 1999-12-14 | 2003-11-25 | Schneider Automation Inc. | Bridge for CAN to TCP/IP connection |
| DE10100343B4 (de) * | 2001-01-05 | 2013-05-08 | Infineon Technologies Ag | Bus-System |
| US7015595B2 (en) * | 2002-02-11 | 2006-03-21 | Vestas Wind Systems A/S | Variable speed wind turbine having a passive grid side rectifier with scalar power control and dependent pitch control |
| US7783808B2 (en) * | 2006-11-08 | 2010-08-24 | Honeywell International Inc. | Embedded self-checking asynchronous pipelined enforcement (escape) |
| DE102007011835A1 (de) * | 2007-03-12 | 2008-10-02 | µ-SEN GMBH | Sensormodul und Sensornetzwerk zur Überwachung einer Windenergieanlage sowie entsprechende Überwachungsverfahren |
| US8009690B2 (en) * | 2009-08-28 | 2011-08-30 | Vestas Wind Systems A/S | Wind turbine data acquisition system |
| US8041225B2 (en) * | 2009-12-21 | 2011-10-18 | General Electric Company | Contactless infrared data transmission for wind turbines |
| JP5532910B2 (ja) * | 2009-12-25 | 2014-06-25 | 株式会社オートネットワーク技術研究所 | 光通信装置、通信ハーネス及び通信システム |
| CN102619682B (zh) | 2011-01-30 | 2014-05-14 | 华锐风电科技(集团)股份有限公司 | 用于风力发电机组的变桨控制系统 |
| EP2521319B1 (en) * | 2011-05-02 | 2015-10-14 | Robert Bosch GmbH | Controller area network with flexible data-rate |
| US9037631B2 (en) * | 2012-02-22 | 2015-05-19 | Ether-2 Corp. | Network communications |
| US9115694B2 (en) * | 2012-08-27 | 2015-08-25 | General Electric Company | Wind turbine pitch control system |
| DE102012215765A1 (de) * | 2012-09-05 | 2014-05-15 | Robert Bosch Gmbh | Gateway-Modul für ein Kommunikationssystem, Kommunikationssystem und Verfahren zur Übertragung von Daten zwischen Teilnehmern eines Kommunikationssystems |
| FR3013776B1 (fr) * | 2013-11-27 | 2015-12-25 | Univ Picardie | Transmission sans fil entre une partie mobile et une partie fixe dans une nacelle d'eolienne |
| CN203704983U (zh) * | 2014-03-08 | 2014-07-09 | 湖南科技大学 | 一种基于无线传输的风力机叶根应力和叶片振动检测装置 |
| CN104092515B (zh) * | 2014-07-11 | 2017-03-22 | 电子科技大学 | 兼容can2.0b协议的can总线通信方法 |
-
2015
- 2015-01-22 DE DE102015201019.8A patent/DE102015201019A1/de not_active Withdrawn
-
2016
- 2016-01-21 BR BR112017015733A patent/BR112017015733A2/pt not_active Application Discontinuation
- 2016-01-21 KR KR1020177022808A patent/KR20170105084A/ko not_active Application Discontinuation
- 2016-01-21 EP EP16702352.2A patent/EP3248336B1/de active Active
- 2016-01-21 CA CA2972145A patent/CA2972145A1/en not_active Abandoned
- 2016-01-21 US US15/543,117 patent/US20180006841A1/en not_active Abandoned
- 2016-01-21 JP JP2017535795A patent/JP6527232B2/ja not_active Expired - Fee Related
- 2016-01-21 DK DK16702352.2T patent/DK3248336T3/da active
- 2016-01-21 CN CN201680006994.5A patent/CN107210944A/zh active Pending
- 2016-01-21 WO PCT/EP2016/051212 patent/WO2016116553A1/de active Application Filing
- 2016-01-22 UY UY0001036534A patent/UY36534A/es not_active Application Discontinuation
- 2016-01-22 TW TW105102130A patent/TW201644235A/zh unknown
- 2016-01-22 AR ARP160100177A patent/AR103487A1/es unknown
Also Published As
| Publication number | Publication date |
|---|---|
| CN107210944A (zh) | 2017-09-26 |
| KR20170105084A (ko) | 2017-09-18 |
| TW201644235A (zh) | 2016-12-16 |
| EP3248336B1 (de) | 2021-01-06 |
| JP2018504840A (ja) | 2018-02-15 |
| WO2016116553A1 (de) | 2016-07-28 |
| BR112017015733A2 (pt) | 2018-03-13 |
| CA2972145A1 (en) | 2016-07-28 |
| DK3248336T3 (da) | 2021-01-25 |
| UY36534A (es) | 2016-08-31 |
| EP3248336A1 (de) | 2017-11-29 |
| US20180006841A1 (en) | 2018-01-04 |
| DE102015201019A1 (de) | 2016-07-28 |
| AR103487A1 (es) | 2017-05-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10447493B2 (en) | MAC and physical layer techniques for enabling communications on shared physical medium with multi-drop capability | |
| CN103490966B (zh) | 一种双冗余can总线数据接收处理方法 | |
| US11269316B2 (en) | Intelligent controller and sensor network bus, system and method including smart compliant actuator module | |
| CN102857397A (zh) | 一种多主异步双工差分总线及通讯方法 | |
| US5742603A (en) | Method and apparatus for integrating repeater management, media access control, and bridging functions | |
| CN103746889B (zh) | 半竞争式rs-485总线多主通讯系统及其工作方法 | |
| US20100111082A1 (en) | Packet Switching Device and Local Communication Network With Such a Packet Switching Device | |
| US10230656B2 (en) | Method and apparatus for controlling message over heterogeneous network | |
| CN101507193B (zh) | 基于can通信控制器及提高数据吞吐量的通信系统的建立方法及设备 | |
| EP1879331A1 (en) | Communication network system and error verification method | |
| CN114144996A (zh) | 用于串行总线系统的用户站的装置和用于在串行总线系统中进行通信的方法 | |
| US6970961B1 (en) | Reliable and redundant control signals in a multi-master system | |
| JP6527232B2 (ja) | 風力タービン、風力タービン通信システム、およびバスシステムを動作させるための方法 | |
| JP4220208B2 (ja) | 確定的フィールドバス及びその種のバスの管理方法 | |
| US10484280B2 (en) | Operation method of a communication node in network | |
| CN102868583B (zh) | 一种具有故障诊断功能的FlexRay总线节点 | |
| JP2007516637A (ja) | データ伝送方法および装置 | |
| CN101296149B (zh) | 高速实时总线的通信方法及装置 | |
| US11115236B2 (en) | Subscriber station for a bus system and method for transmitting data in a bus system | |
| CN109802877A (zh) | 一种基于can总线的通信系统设计 | |
| CN209118135U (zh) | 一种电动自行车用can总线通信电路 | |
| CN112867997A (zh) | 包括智能柔性执行器模块的智能控制器及传感器网络总线、系统和方法 | |
| KR100334417B1 (ko) | 점대점 구조를 갖는 백 플랜 시스템 | |
| JP4897393B2 (ja) | データ伝送装置 | |
| Fragoso et al. | Specification and design of an Ethernet Interface soft IP |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180829 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180925 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20181225 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190222 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190416 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190509 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6527232 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |