JP6525166B2 - 力測定装置の与圧デバイス - Google Patents
力測定装置の与圧デバイス Download PDFInfo
- Publication number
- JP6525166B2 JP6525166B2 JP2016560533A JP2016560533A JP6525166B2 JP 6525166 B2 JP6525166 B2 JP 6525166B2 JP 2016560533 A JP2016560533 A JP 2016560533A JP 2016560533 A JP2016560533 A JP 2016560533A JP 6525166 B2 JP6525166 B2 JP 6525166B2
- Authority
- JP
- Japan
- Prior art keywords
- force
- pressure
- recess
- introducing
- receiving pocket
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000003780 insertion Methods 0.000 claims description 20
- 230000037431 insertion Effects 0.000 claims description 20
- 238000005259 measurement Methods 0.000 claims description 10
- 238000000034 method Methods 0.000 claims description 3
- 239000007769 metal material Substances 0.000 claims description 2
- 238000010276 construction Methods 0.000 description 4
- 238000009434 installation Methods 0.000 description 4
- 230000002452 interceptive effect Effects 0.000 description 3
- 241000446313 Lamella Species 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 229910052753 mercury Inorganic materials 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/0028—Force sensors associated with force applying means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/16—Measuring force or stress, in general using properties of piezoelectric devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L5/00—Apparatus for, or methods of, measuring force, work, mechanical power, or torque, specially adapted for specific purposes
- G01L5/0004—Force transducers adapted for mounting in a bore of the force receiving structure
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
- Investigating Strength Of Materials By Application Of Mechanical Stress (AREA)
Description
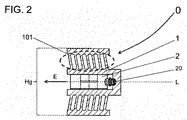
本発明を、図面を参照しながら以下でより詳細に説明する。
コレットチャックは、与圧デバイス1を所望の凹所4内に挿入するツールとして、場合によっては使用することができる。
1 与圧デバイス/与圧要素(1つ)
1’ 与圧デバイス
2 力センサ
2 圧電性測定ワッシャ
3 固定手段
3’ 固定手段
4 凹所
5 機械部品
5’ 機械部品
6 ローラ
10 アーム
10’ アーム
11 受け取りポケット
12 ツール係合部
20 接続デバイス
30 はり
30’ はり
31 ねじ
31’ ねじ
32 中央ねじ
33 雌ねじ
40 凹所壁
100 力導入面を有する力導入プレート
100’ 力導入面を有する力導入プレート
101 弾性的可撓性部
101’ 弾性的可撓性部
111 第1の壁
112 第2の壁
120 張力/圧力プレート
121 アンダーカット
122 雌ねじ
1001 エッジ部
1001’ エッジ部
1002 ねじ穴
1010 薄板
1011 楕円形の穴
E 挿入方向/取付方向
F 締付方向及び加力方向
H 弾性的に張力をかけた設置状態の高さ
Hg ゆるんだ基本的状態の高さ
h 挿入状態の高さ
L 長手方向軸
Claims (15)
- 力センサ(2)を受け取るための受け取りポケット(11)を有する与圧デバイス(1)であって、長手方向軸(L)に対して垂直に延びる方向に相互に対向して配置され、相互に離れるように向いている力導入面を有する、少なくとも2つの力導入プレート(100、100’)を備え、
それにより、前記受け取りポケット(11)内で外部の力(F)が前記力センサ(2)に伝達され得るような方法で、前記力導入プレート(100、100’)の前記力導入面間に与圧を生成することにより、1つの機械部品内若しくは複数の機械部品間(5、5’)、又はローラ(6)内の凹所(4)内に、前記与圧デバイス(1)が配置される、与圧デバイス(1)において、
前記与圧デバイス(1)が、前記受け取りポケット(11)から前記長手方向軸(L)の方向に距離をおいて配置されたツール係合部(12)を備え、少なくとも1つの弾性的可撓性部(101)が、前記受け取りポケット(11)と前記力導入プレート(100)のうちの少なくとも1つとの間に分離できないように配置され、
前記少なくとも1つの弾性的可撓性部(101)の弾性的撓みにより、前記長手方向軸(L)に平行なそれぞれ異なる方向に、前記力導入プレート(100、100’)のうちの少なくとも1つ、及び、前記ツール係合部(12)に力を及ぼすことにより、前記与圧デバイス(1)のゆるんだ状態の高さ(Hg)を前記与圧デバイス(1)の設置状態の高さ(h)に低減することが可能となることを特徴とする、与圧デバイス(1)。 - 両方の力導入プレート(100、100’)が、弾性的可撓性部(101、101’)にそれぞれ接続している、請求項1に記載の与圧デバイス(1)。
- 与圧要素(1)の形式における1つの部品で実現される、請求項1から2までのいずれか一項に記載の与圧デバイス(1)。
- 金属材料又はプラスチックからなる、請求項3に記載の与圧デバイス(1)。
- 前記力導入プレート(100、100’)が、前記与圧デバイス(1)が円筒形状の凹所(4)内に挿入され得るように湾曲した力導入面を有する、請求項1から4までのいずれか一項に記載の与圧デバイス(1)。
- 前記少なくとも1つの弾性的可撓性部(101、101’)が、前記力導入プレート(100、100’)から、前記受け取りポケット(11)の方向に延びる複数の薄板(1010)及び楕円形の穴(1011)によって形成される、請求項1から5までのいずれか一項に記載の与圧デバイス(1)。
- 前記弾性的可撓部(101、101’)及びそれに応じた前記楕円形の穴(1011)が、前記弾性的可撓部(101、101’)から前記力センサ(2)への締付方向に対して角度αで配列される、請求項6に記載の与圧デバイス(1)。
- 前記角度αが10度以下になる、請求項7に記載の与圧デバイス(1)。
- 前記ツール係合部(12)が、ツールに接続し得る張力/圧力プレート(120)を備える、請求項1から8までのいずれか一項に記載の与圧デバイス(1)。
- 中に形成された弾性的可撓性部(101、101’)を有する2つのアーム(10、10’)が、前記ツール係合部(12)から発する、請求項1から9までのいずれか一項に記載の与圧デバイス(1)。
- 前記長手方向軸(L)に関して鏡面対称な形状を有する与圧デバイス(1)が形成されるように、前記受け取りポケット(11)が前記与圧デバイス(1)の本体内で中央に凹所をなす、請求項1から10までのいずれか一項に記載の与圧デバイス(1)。
- 請求項1から11までのいずれか一項に記載の与圧デバイス、及び、前記受け取りポケット(11)内に固定された力センサ(2)を備える力測定位置(0)。
- 前記与圧デバイス(1)が、固定手段(3、3’)を使用して前記凹所(4)内に分離可能なように取り付けられ得る、請求項12に記載の力測定位置(0)。
- 使用された前記固定手段(3、3’)が、はり(30)と少なくとも1つのねじ(31、31’)とからなり、前記ねじ(31、31’)が、エッジ部(1001、1001’)又は前記ツール係合部(12)の、ねじ穴(1002、1002’)内にそれぞれ固定され得る、請求項13に記載の力測定位置(0)。
- 請求項12から14までのいずれか一項に記載の力測定位置(0)を、1つの機械部品内若しくは複数の機械部品間(5、5’)、又はローラ(6)内の凹所(4)内に取り付けるための方法であって、
前記少なくとも1つの弾性的可撓性部(101)の弾性的な撓みが発生するように、少なくとも1つの力導入プレート(100)及び前記ツール係合部(12)に対して、前記与圧デバイス(1)の前記長手方向軸(L)に平行な反対方向の力を加えるステップと、
前記力を加えるのを中止する前に、前記力測定位置(0)を挿入方向で前記凹所(4)内に同時に挿入するステップと、
その後に、前記少なくとも1つの弾性的可撓性部(101)の弾性的復元力による締付方向の与圧下で、前記与圧デバイス(1)を前記凹所(4)内に前記挿入方向と垂直に固定するステップと
を含むことを特徴とする方法。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CH506/14 | 2014-04-02 | ||
| CH00506/14A CH709459A1 (de) | 2014-04-02 | 2014-04-02 | Vorspannvorrichtung einer Kraftmessvorrichtung, Kraftmessvorrichtung und Verfahren zu deren Einführung in Aussparungen von Maschinenteilen. |
| PCT/CH2015/000051 WO2015149190A1 (de) | 2014-04-02 | 2015-04-01 | Vorspannvorrichtung einer kraftmessvorrichtung |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017509894A JP2017509894A (ja) | 2017-04-06 |
| JP2017509894A5 JP2017509894A5 (ja) | 2018-05-24 |
| JP6525166B2 true JP6525166B2 (ja) | 2019-06-05 |
Family
ID=50478117
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016560533A Expired - Fee Related JP6525166B2 (ja) | 2014-04-02 | 2015-04-01 | 力測定装置の与圧デバイス |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9677958B2 (ja) |
| EP (1) | EP3126803B1 (ja) |
| JP (1) | JP6525166B2 (ja) |
| CN (1) | CN106133492B (ja) |
| CH (1) | CH709459A1 (ja) |
| WO (1) | WO2015149190A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US12128516B2 (en) | 2018-10-10 | 2024-10-29 | Kistler Holding Ag | Tool and method for measuring a tool force |
| DE102018009611A1 (de) * | 2018-12-11 | 2020-06-18 | Vdeh-Betriebsforschungsinstitut Gmbh | Messrolle zum Feststellen einer Eigenschaft eines über die Messrolle geführten bandförmigen Guts |
| DE102018009610A1 (de) * | 2018-12-11 | 2020-06-18 | Vdeh-Betriebsforschungsinstitut Gmbh | Verfahren zum Feststellen einer Eigenschaft eines über die Messrolle geführten bandförmigen Guts |
| CN112414854B (zh) * | 2020-10-27 | 2022-06-14 | 哈尔滨工程大学 | 一种曲面板耐压测试加载机构 |
| DE102023118155B3 (de) | 2023-07-10 | 2024-10-10 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung eingetragener Verein | Messsystem zur Prozess- und/oder Maschinenüberwachung |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3577112A (en) * | 1969-05-22 | 1971-05-04 | Duriron Co | Apparatus for high pressure measurement |
| CH587475A5 (ja) * | 1975-09-26 | 1977-04-29 | Kistler Instrumente Ag | |
| SE8400484D0 (sv) * | 1984-01-31 | 1984-01-31 | Slim Borgudd | Anordning for metning av dynamisk och statisk lastpakenning vid en draganordning for t ex drivorgan |
| DE4134454A1 (de) * | 1991-10-18 | 1993-04-22 | Klaus Brankamp System Prozessa | Verfahren und vorrichtung zur beruehrungslosen prozessueberwachung von werkzeugmaschinen |
| US5824917A (en) | 1993-09-14 | 1998-10-20 | Kluft; Werner | Force measuring device |
| JPH10329668A (ja) * | 1997-05-29 | 1998-12-15 | Aisin Seiki Co Ltd | 入力量検出装置 |
| CA2316800A1 (en) * | 1998-10-30 | 2000-01-20 | Digi Sens Ag | Force measuring cell |
| DE10242250A1 (de) * | 2002-09-12 | 2004-03-25 | Robert Bosch Gmbh | Kraftsensor |
| JP2006515427A (ja) | 2003-01-17 | 2006-05-25 | キストラー ホールディング アクチエンゲゼルシャフト | センサ用のプレストレス要素 |
| US7240711B2 (en) * | 2004-01-21 | 2007-07-10 | Asm Assembly Automation Ltd. | Apparatus and method for alignment of a bonding tool |
| FR2886400B1 (fr) | 2005-05-25 | 2007-09-07 | Messier Bugatti Sa | Cellule de mesure d'effort et axe de liaison equipe d'une telle cellule |
| DE102006017174B4 (de) * | 2006-04-12 | 2017-03-02 | Robert Bosch Gmbh | Kraftmesselement |
| EP2029988B1 (de) * | 2006-06-14 | 2018-09-05 | Kistler Holding AG | Querkraftmessung |
| US20080166200A1 (en) * | 2007-01-10 | 2008-07-10 | Mccoy Bolt Works, Inc. | Device for establishing desired minimum preload condition obtained in a fastener shank |
| CH704255A1 (de) * | 2010-12-22 | 2012-06-29 | Kistler Holding Ag | Kraftsensorsystem und verfahren für planheitsmessungen von folien- oder blechbändern beim walzen. |
| CH705675A1 (de) * | 2011-10-20 | 2013-04-30 | Kistler Holding Ag | Hohlprofil-Aufnehmer. |
| US20130114994A1 (en) * | 2011-11-04 | 2013-05-09 | Robert Erik Grip | Truss end pad fitting |
| CH705783A1 (de) * | 2011-11-18 | 2013-05-31 | Kistler Holding Ag | WIM Hohlprofil. |
| US8726740B1 (en) * | 2012-12-13 | 2014-05-20 | King Fahd University Of Petroleum And Minerals | Multi-axis dynamometer |
-
2014
- 2014-04-02 CH CH00506/14A patent/CH709459A1/de not_active Application Discontinuation
-
2015
- 2015-04-01 US US15/127,125 patent/US9677958B2/en active Active
- 2015-04-01 EP EP15716709.9A patent/EP3126803B1/de active Active
- 2015-04-01 WO PCT/CH2015/000051 patent/WO2015149190A1/de active Application Filing
- 2015-04-01 CN CN201580017976.2A patent/CN106133492B/zh not_active Expired - Fee Related
- 2015-04-01 JP JP2016560533A patent/JP6525166B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CH709459A1 (de) | 2015-10-15 |
| CN106133492A (zh) | 2016-11-16 |
| US9677958B2 (en) | 2017-06-13 |
| WO2015149190A1 (de) | 2015-10-08 |
| EP3126803A1 (de) | 2017-02-08 |
| EP3126803B1 (de) | 2020-02-05 |
| CN106133492B (zh) | 2019-08-20 |
| JP2017509894A (ja) | 2017-04-06 |
| US20170122823A1 (en) | 2017-05-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6525166B2 (ja) | 力測定装置の与圧デバイス | |
| CN103765181A (zh) | 力传感器和机器人 | |
| JP5890929B1 (ja) | ゲートバルブ | |
| US8651443B2 (en) | Device for the clamping attachment of a scale | |
| JP2007199068A (ja) | 圧力センサのための保持装置並びに圧力センサを有する測定ローラ | |
| KR102000284B1 (ko) | 용접 지그 | |
| KR101202418B1 (ko) | 소켓정착부를 이용한 케이블 정착장치 | |
| KR20080106028A (ko) | 형체결력 측정 센서 | |
| JP2017509894A5 (ja) | ||
| JP2015230765A (ja) | 電池モジュール | |
| EP1926965B1 (de) | Dehnungsaufnehmer zum elektrischen messen negativer und positiver oberflächendehnungen | |
| KR102573945B1 (ko) | 장착 기구 | |
| KR101274269B1 (ko) | 축부재 하중 측정용 로드 셀 | |
| KR101864869B1 (ko) | 진동 에너지 수확 장치의 배관 고정을 위한 구조물 및 그 고정 방법 | |
| US20150369329A1 (en) | Device for mechanically adjusting vibration behavior of a machine element | |
| KR101361827B1 (ko) | 지지부재를 포함하는 방진패드 | |
| KR101049394B1 (ko) | 진동 액추에이터 | |
| US9299328B2 (en) | Tilter for a stand, in particular a cymbal stand | |
| JP7402758B2 (ja) | 水準器 | |
| JP2020148035A (ja) | 既製コンクリート杭と杭頭補強筋との接合部の構造 | |
| KR101549774B1 (ko) | 비정형면에 설치되기 위한 가속도계 행거 | |
| JP2022038704A (ja) | 取付金具 | |
| EP3191633A1 (en) | Corner connecting device for a heald frame | |
| JP2024087765A (ja) | 超音波流量センサ | |
| KR101512387B1 (ko) | 조립 구조물용 파이프 연결 고정장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180402 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180402 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181220 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190104 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190403 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190416 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190423 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6525166 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |