JP6521700B2 - 計測装置および計測方法 - Google Patents
計測装置および計測方法 Download PDFInfo
- Publication number
- JP6521700B2 JP6521700B2 JP2015072255A JP2015072255A JP6521700B2 JP 6521700 B2 JP6521700 B2 JP 6521700B2 JP 2015072255 A JP2015072255 A JP 2015072255A JP 2015072255 A JP2015072255 A JP 2015072255A JP 6521700 B2 JP6521700 B2 JP 6521700B2
- Authority
- JP
- Japan
- Prior art keywords
- shape information
- defect
- area
- measurement
- error
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title description 24
- 230000007547 defect Effects 0.000 claims description 207
- 238000005259 measurement Methods 0.000 claims description 157
- 238000011156 evaluation Methods 0.000 claims description 33
- 238000000691 measurement method Methods 0.000 claims description 8
- 230000002950 deficient Effects 0.000 claims 1
- 238000013500 data storage Methods 0.000 description 24
- 230000008859 change Effects 0.000 description 9
- 238000012545 processing Methods 0.000 description 8
- 230000008520 organization Effects 0.000 description 7
- 238000007689 inspection Methods 0.000 description 5
- 238000009434 installation Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 230000005856 abnormality Effects 0.000 description 3
- 230000007423 decrease Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000002366 time-of-flight method Methods 0.000 description 2
- 238000005299 abrasion Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000014509 gene expression Effects 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images








Landscapes
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Length Measuring Devices By Optical Means (AREA)
Description
このような技術を応用した装置として、パンタグラフを検査するための検査装置がある。パンタグラフが架線と接触することにより、車両に電力が伝達されるため、パンタグラフにおける架線と接触する領域は摩耗する。この摩耗領域を計測することにより、摩耗量を取得して部品の交換などを行う。また、パンタグラフの架線接触領域に欠損が発生すると、架線も損傷する可能性があるため、欠損の検出も上記技術により行われる。例えば、パンタグラフの検査装置として、特許文献1に記載されているようなパンタグラフのすり板検査装置が知られている。特許文献1には、パンタグラフのすり板の摩耗量を算出する方法の一例が開示されている。
計測対象の形状情報を取得する形状情報取得手段と、
前記計測対象の形状情報である第1形状情報及び前記第1形状情報よりも過去の前記計測対象の形状情報である第2形状情報に基づいてエラー判定を行うデータ比較手段と、を備え、
前記データ比較手段は、前記第1形状情報から算出した評価値と、前記第2形状情報から算出した評価値と、前記第1形状情報及び前記第2形状情報の間の経過情報と、に基づいて、前記エラー判定を行う領域であるエラー判定領域のエラー判定を行い、
前記エラー判定領域は、前記計測対象に形成された欠損領域であるように構成されている。
前記データ比較手段は、さらに、前記第1形状情報から算出した評価値に基づいて前記エラー判定領域の前記エラー判定を行うように構成することが可能である。
前記データ比較手段は、前記第1形状情報から算出した前記欠損領域のサイズと、前記第2形状情報から算出した当該欠損領域のサイズと、前記経過情報と、に基づいて当該欠損領域のエラー判定を行うように構成することが可能である。
また、前記経過情報は、前記第1形状情報と前記第2形状情報との間の期間であるように構成することが可能である。
また、前記計測対象は車両に取り付けられており、
前記経過情報は、前記第1形状情報と前記第2形状情報との間の前記車両の走行距離であるように構成することが可能である。
計測対象の形状情報である第1形状情報と、前記第1形状情報よりも過去の前記計測対象の形状情報である第2形状情報と、に基づいてエラー判定を行うデータ比較ステップと、
前記データ比較ステップでのエラー判定の結果を通知するエラー通知ステップと、を有し、
前記データ比較ステップでは、前記第1形状情報から算出した前記エラー判定を行う領域であるエラー判定領域の評価値と、前記第2形状情報から算出した当該エラー判定領域の評価値と、前記第1形状情報及び前記第2形状情報の間の経過情報と、に基づいてエラー判定を行い、
前記エラー判定領域は、前記計測対象に形成された欠損領域であるように構成されている。
図1は、本実施形態の計測装置100の一構成例を示すブロック図である。
本実施形態の計測装置100は、形状情報取得部101と、データ記憶部102と、データ比較部103と、エラー通知部104と、を備える。
例えばステレオカメラ方式を適用する場合、形状情報取得部101は、2つのカメラモジュール、当該2つのカメラモジュールにより撮影した画像から視差を算出して三次元データを取得する演算処理部などを備える。カメラモジュールは、CCD(Charge Coupled Device)やCMOS(Complementary Metal Oxide Semiconductor)センサといった固体撮像素子、レンズなどにより構成される。演算処理部は、CPU(Central Processing Unit)やGPU(Graphics Processing Unit)によるソフトウェア処理、ASIC(Application Specific Integrated Circuit)やFPGA(Field Programmable Gate Array)によるハードウェア処理によって実現することができる。視差の算出には、ブロックマッチングを使用した方法などを使用することができる。
すなわち、形状情報取得部101が、計測対象の形状情報(本実施形態の場合、三次元データ)を取得する形状情報取得手段をなす。
データ記憶部102は、形状情報取得部101により取得された三次元データを記憶する。データ記憶部102は、ハードディスクやフラッシュメモリなどの記憶装置を使用することができる。データ記憶部102は、記憶している過去の三次元データ(すなわち、形状情報取得部101により過去に取得された計測対象の三次元データ)をデータ比較部103に伝達する。
すなわち、データ記憶部102が、形状情報取得手段(形状情報取得部101)により取得された形状情報を記憶するデータ記憶手段をなす。
すなわち、データ比較部103が、形状情報取得手段(形状情報取得部101)により取得された計測対象の現在の形状情報と、データ記憶手段(データ記憶部102)に記憶されている当該計測対象の過去の形状情報と、に基づいてエラー判定を行うデータ比較手段をなす。
すなわち、エラー通知部104が、データ比較手段(データ比較部103)によるエラー判定の結果を通知するエラー通知手段をなす。
以下、図2に示すように、計測対象105の長手方向をX方向と呼ぶ。また、計測対象105の上下方向をY方向と呼び、上側をY方向プラス側、下側をY方向マイナス側と呼ぶ。また、計測対象105の短手方向をZ方向と呼ぶ。
例えば、計測対象105の限界の摩耗量を摩耗量閾値としてあらかじめ設定しておき、摩耗面106の摩耗量のうち最も大きい値を摩耗量閾値と比較することで、計測対象105の摩耗状態を判定することができる。
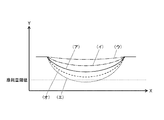
データ比較部103では、このようなデータにより摩耗量の変化を比較する。図4において、(ア)は計測対象105の現在の三次元データ(現時点での計測結果)から生成されたグラフであり、(イ)は当該計測対象105の過去の三次元データのうち1回前の計測で取得された三次元データ(1回前の計測結果)から生成されたグラフであり、(ウ)は当該計測対象105の過去の三次元データのうち2回前の計測で取得された三次元データ(2回前の計測結果)から生成されたグラフである。
(エ)の場合には、あらかじめ設定されている摩耗量閾値よりも摩耗している。つまり、現時点((ア)が取得された時点)では摩耗量閾値よりも摩耗していないため、摩耗量の判定は正常となるが、推定摩耗量の判定はエラーとなる。これは、次回の計測日までに摩耗量が摩耗量閾値よりも大きくなることを示している。
一方、(オ)の場合には、次回の計測日までに摩耗量が摩耗量閾値よりも大きくならないことを示しいている。
このように、現時点では摩耗量閾値と比較して正常と判定される摩耗状態であっても、過去のデータと比較して将来の摩耗量を推定すると、異なる摩耗量の判定が可能となる。
このとき、当該算出した現在の摩耗量とあらかじめ設定された摩耗量閾値とを比較した結果を使用して、最終的なエラー判定を行っても良く、現在と将来の評価値に基づいて判定することで、より高精度のエラー判定が可能となる。すなわち、データ比較部103は、計測対象の現在の形状情報から当該計測対象に形成されたエラー判定領域の評価値を算出し、当該算出した評価値とあらかじめ設定された閾値とを比較した結果と、計測対象の現在の形状情報から算出したエラー判定領域の評価値と、当該計測対象の過去の形状情報から算出した当該エラー判定領域の評価値と、を比較することによって推定した当該エラー判定領域の将来の評価値と、に基づいてエラー判定を行うように構成しても良い。
また、計測対象を交換して新しくした場合も、現在の計測結果を過去の計測結果と比較することができないため、その場合にも、単独の計測結果のみでエラー判定を行う(すなわち、現在の評価値(摩耗量など)と閾値(摩耗量閾値など)とを比較した結果に基づくエラー判定のみを行う)ようにしておくとよい。また、例えば、摩耗量は増加する方向(Y方向マイナス側)にのみ変化するため、摩耗量が減少した場合には、計測対象が交換された後の初回の計測と推定することができる。これにより、自動で初回と判定することができユーザの手間(例えば、計測対象を交換したことを入力する手間)を省くことができ好適である。
本実施形態における計測装置100の構成は、実施形態1の計測装置100と同様であるため、共通する各部の詳細な説明は省略する。
図5に、本実施形態における計測対象200の一例を示す。計測対象200は、図5に示すように、計測対象105と同様、摩耗面201を有している。さらに、計測対象200は、欠損202を有している。本実施形態の計測装置100は、このような欠損を検出して、ユーザに通知を行う。例えば、計測対象200がパンタグラフである場合、パンタグラフのすり板に欠損が発生すると、すり板と接触する接触物体(架線)が損傷する可能性がある。そのため、計測対象に欠損が発生していることをユーザに通知する必要がある。ユーザに通知する欠損のサイズは、計測対象に接触する接触物体のサイズなどによって適宜設定することができる。
図6(a)は、計測対象200をZ方向から見た図であって、現在の三次元データをXY平面に投影して得た図である。図6(a)に示すように、欠損202では、摩耗面201の連続性が大きく変化している。このように、計測対象200の輪郭の三次元データをXY平面に投影して、計測対象200の輪郭を解析することで、欠損領域を検出することができる。例えば、周辺の領域に比べて計測対象200の輪郭の座標値がY方向に大きく変位している領域、計測対象200の輪郭の傾きが大きく変化している領域などを三次元データから算出することで、欠損領域(図6(a)に示す例の場合、欠損202)を検出することができる。
図6(b)および図6(c)は、計測対象200をZ方向から見た図であって、過去の三次元データをXY平面に投影して得た図である。
図6(b)の場合、摩耗面204には、欠損202が発生している領域と同じX方向における位置に、欠損203が発生しており、欠損203は、欠損202と比較すると、欠損サイズAも欠損サイズBも小さい。つまり、図6(b)の計測が行われたときから、図6(a)の計測が行われたときまでの間に、欠損領域のサイズが大きくなっていることになる。
一方、図6(c)の場合、摩耗面204には、欠損202が発生している領域と同じX方向における位置に、欠損205が発生しており、欠損205は、欠損202と比較すると、欠損サイズAも欠損サイズBも大きい。つまり、図6(c)の計測が行われたときから、図6(a)の計測が行われたときまでの間に、欠損領域のサイズが小さくなっていることになる。
なお、現在の欠損202と過去の欠損203,205との対応は、例えば、欠損領域の中央値や平均値の座標値を代表座標として、代表座標同士を比較して近ければ同一の欠損として処理を行うことで実現できる。例えば、あらかじめ設定される2点間の距離よりも、代表座標同士(すなわち、現在の欠損の代表座標と過去の欠損の代表座標)の距離が小さければ同一の欠損であり、大きければ異なる欠損として処理を行う。ここで、2点間の距離は撮影画像上の座標で設定しておいても良いが、撮影位置のずれなどを補正して計算する必要があるので、三次元データで算出するのが好適である。
このとき、当該算出した現在のサイズとあらかじめ設定された欠損閾値とを比較した結果を使用して、最終的なエラー判定を行っても良く、現在と将来の評価値に基づいて判定することで、より高精度のエラー判定が可能となる。すなわち、データ比較部103は、計測対象の現在の形状情報から当該計測対象に形成されたエラー判定領域の評価値を算出し、当該算出した評価値とあらかじめ設定された閾値とを比較した結果と、計測対象の現在の形状情報から算出したエラー判定領域の評価値と、当該計測対象の過去の形状情報から算出した当該エラー判定領域の評価値と、を比較することによって推定した当該エラー判定領域の将来の評価値と、に基づいてエラー判定を行うように構成しても良い。
図7は、図5に示す計測対象200をY方向から見た図である。図7に示す図からも、摩耗面201に欠損202が発生していることが確認できる。XY平面(例えば図6)で欠損領域を検出したときと同様に、計測対象200の輪郭の座標値が大きく変位している領域や、計測対象200の輪郭の傾きが大きく変化している領域などを欠損領域として検出することで、欠損サイズCを算出することができる。このように、異なる方向から欠損領域を検出することにより、様々な欠損サイズを算出することができる。欠損サイズAおよび欠損サイズBに加えて、欠損サイズCを欠損エラー判定に使用することで、より詳細な欠損エラー判定が可能となり、ユーザへの通知も詳細に行えるようになる。
また、本実施形態では、1つの欠損について説明したが、複数の欠損に対しても同様の処理を行うことができる。複数の欠損の過去のデータとの対応は、例えば、欠損領域の中央値や平均値の座標値を代表座標として、代表座標同士を比較して近いものを同一箇所の欠損として処理を行うことで実現できる。ユーザへの通知は、最大サイズの欠損に対して行うようにしたり、欠損サイズの大きさが上位2つの欠損に対して行うようにしたりすることが可能であるが、ユーザが適宜設定できるようにすると、ユーザが所望とする通知が実現可能となり好適である。
本実施形態では、上記実施形態で示した機能を実現する計測方法について説明する。例えば、当該機能を実現する計測方法をプログラムとして記憶媒体に記録しておく。コンピュータにより記憶媒体に記録されたプログラムを読み込み、実行させることで実現できる。記憶媒体としては、光ディスク、磁気ディスク、フラッシュメモリなどが使用可能である。また、上記プログラムをインターネットなどのネットワーク回線を利用して提供することも可能である。さらに、FPGAで使用可能な回路情報として計測方法を記録しておくこともできる。回路情報は記録媒体やネットワークを介して提供され、FPGAにダウンロードして当該機能を実現する。
まず、形状情報取得部101が、計測対象の形状情報を取得する(ステップS1)。
次いで、データ記憶部102が、ステップS1で取得された計測対象の現在の形状情報を記憶する(ステップS2)。
次いで、データ記憶部102(或いは、データ比較部103であってもよい。)が、データ記憶部102に記憶されている計測対象の過去の形状情報を取得する(ステップS3)。
次いで、データ比較部103が、現在の摩耗量や現在の欠損サイズなどを設定されている閾値と比較するとともに、現在の摩耗量や現在の欠損サイズなどを過去のデータと比較する(ステップS4)。
次いで、データ比較部103が、ステップS4で比較した結果に基づいて、摩耗エラー判定や欠損エラー判定を行う(ステップS5)。
すなわち、ステップS4,S5では、データ比較部103が、計測対象の現在の形状情報と、当該計測対象の過去の形状情報と、に基づいてエラー判定を行う(データ比較ステップ)。
次いで、エラー通知部104が、ステップS5でのエラー判定の結果をユーザに通知する(ステップS6(エラー通知ステップ))。
これにより、詳細なエラー判定が可能な計測方法を実現することができる。
また、上述の各実施形態の構成は適宜組み合わせて適用することが可能である。
101 形状情報取得部(形状情報取得手段)
102 データ記憶部(データ記憶手段)
103 データ比較部(データ比較手段)
104 エラー通知部(エラー通知手段)
105 計測対象
106 摩耗面(摩耗領域)
200 計測対象
201 摩耗面
202 欠損(欠損領域)
203 欠損(欠損領域)
204 摩耗面
205 欠損(欠損領域)
Claims (9)
- 計測対象の形状情報を取得する形状情報取得手段と、
前記計測対象の形状情報である第1形状情報及び前記第1形状情報よりも過去の前記計測対象の形状情報である第2形状情報に基づいてエラー判定を行うデータ比較手段と、を備え、
前記データ比較手段は、前記第1形状情報から算出した評価値と、前記第2形状情報から算出した評価値と、前記第1形状情報及び前記第2形状情報の間の経過情報と、に基づいて、前記エラー判定を行う領域であるエラー判定領域のエラー判定を行い、
前記エラー判定領域は、前記計測対象に形成された欠損領域であることを特徴とする計測装置。 - 前記第1形状情報は、前記計測対象の現在の形状情報であり、
前記データ比較手段は、さらに、前記第1形状情報から算出した評価値に基づいて前記エラー判定領域の前記エラー判定を行うことを特徴とする請求項1に記載の計測装置。 - 前記エラー判定領域は、前記計測対象が有する摩耗領域に形成された欠損領域を含むことを特徴とする請求項1又は2に記載の計測装置。
- 前記評価値は、前記計測対象に形成された欠損領域のサイズであり、
前記データ比較手段は、前記第1形状情報から算出した前記欠損領域のサイズと、前記第2形状情報から算出した当該欠損領域のサイズと、前記経過情報と、に基づいて当該欠損領域のエラー判定を行うことを特徴とする請求項1又は2に記載の計測装置。 - 前記データ比較手段は、前記第1形状情報から算出した前記欠損領域のサイズと、前記第2形状情報から算出した当該欠損領域のサイズと、を比較し、当該欠損領域のサイズが大きくなっている場合と、小さくなっている場合とで、異なるエラー判定を行うことを特徴とする請求項4に記載の計測装置。
- 前記データ比較手段は、前記第1形状情報と前記第2形状情報とに基づいて、前記計測対象に形成された欠損領域が、新規で発生した領域である場合と、過去に発生していた領域である場合とで、異なるエラー判定を行うことを特徴とする請求項4に記載の計測装置。
- 前記経過情報は、前記第1形状情報と前記第2形状情報との間の期間であることを特徴とする請求項1から請求項6のいずれか一項に記載の計測装置。
- 前記計測対象は車両に取り付けられており、
前記経過情報は、前記第1形状情報と前記第2形状情報との間の前記車両の走行距離であることを特徴とする請求項1から請求項6のいずれか一項に記載の計測装置。 - 計測対象の形状情報である第1形状情報と、前記第1形状情報よりも過去の前記計測対象の形状情報である第2形状情報と、に基づいてエラー判定を行うデータ比較ステップと、
前記データ比較ステップでのエラー判定の結果を通知するエラー通知ステップと、を有し、
前記データ比較ステップでは、前記第1形状情報から算出した前記エラー判定を行う領域であるエラー判定領域の評価値と、前記第2形状情報から算出した当該エラー判定領域の評価値と、前記第1形状情報及び前記第2形状情報の間の経過情報と、に基づいてエラー判定を行い、
前記エラー判定領域は、前記計測対象に形成された欠損領域であることを特徴とする計測方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015072255A JP6521700B2 (ja) | 2015-03-31 | 2015-03-31 | 計測装置および計測方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015072255A JP6521700B2 (ja) | 2015-03-31 | 2015-03-31 | 計測装置および計測方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016191648A JP2016191648A (ja) | 2016-11-10 |
| JP2016191648A5 JP2016191648A5 (ja) | 2018-05-24 |
| JP6521700B2 true JP6521700B2 (ja) | 2019-05-29 |
Family
ID=57246363
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015072255A Active JP6521700B2 (ja) | 2015-03-31 | 2015-03-31 | 計測装置および計測方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6521700B2 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7119621B2 (ja) | 2018-06-18 | 2022-08-17 | オムロン株式会社 | 画像処理システムおよび画像処理方法 |
| JP6660636B2 (ja) * | 2018-07-31 | 2020-03-11 | 独立行政法人国立高等専門学校機構 | 研削工具砥面評価装置とその学習器、評価プログラムおよび評価方法 |
| JP2022001825A (ja) * | 2018-10-02 | 2022-01-06 | シャープ株式会社 | 摩耗度合い算出装置、摩耗度合い算出方法、摩耗度合い算出プログラムおよび記録媒体 |
| JP6660458B1 (ja) * | 2018-12-27 | 2020-03-11 | 株式会社アマダホールディングス | 金型管理装置及び金型管理方法 |
| JP7046148B1 (ja) * | 2020-11-26 | 2022-04-01 | 三菱電機株式会社 | 診断システム、診断プログラムおよび診断方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003237547A (ja) * | 2002-02-18 | 2003-08-27 | Hitachi Industries Co Ltd | 車輪管理システム |
| JP2003344023A (ja) * | 2002-05-31 | 2003-12-03 | Hitachi Industries Co Ltd | 車輪形状測定装置 |
| JP4216784B2 (ja) * | 2004-09-10 | 2009-01-28 | 日立交通テクノロジー株式会社 | パンタグラフのすり板検査装置 |
| JP2010136563A (ja) * | 2008-12-08 | 2010-06-17 | Hitachi Transportation Technologies Ltd | パンタグラフ型集電装置の検査装置及びパンタグラフ型集電装置の検査方法 |
| EP2312269A1 (en) * | 2009-08-26 | 2011-04-20 | Image House A/S | A method and a system for inspecting a pantograph |
| JP2013225085A (ja) * | 2012-03-19 | 2013-10-31 | Ricoh Co Ltd | 画像形成装置 |
-
2015
- 2015-03-31 JP JP2015072255A patent/JP6521700B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016191648A (ja) | 2016-11-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6521700B2 (ja) | 計測装置および計測方法 | |
| JP6109357B2 (ja) | 情報処理装置、情報処理方法、及びプログラム | |
| US10024653B2 (en) | Information processing apparatus, information processing method, and storage medium | |
| JP5578844B2 (ja) | 情報処理装置、情報処理方法及びプログラム | |
| JP5631025B2 (ja) | 情報処理装置、その処理方法及びプログラム | |
| US10271039B2 (en) | Structured light matching of a set of curves from two cameras | |
| JP6468802B2 (ja) | 三次元計測装置、三次元計測方法及びプログラム | |
| JP6335011B2 (ja) | 計測装置およびその方法 | |
| US20160300356A1 (en) | Measurement device that measures shape of object to be measured, measurement method, system, and article production method | |
| US10006762B2 (en) | Information processing apparatus, information processing method, and storage medium | |
| JP2011030626A5 (ja) | ||
| US20190236798A1 (en) | Structured light matching of a set of curves from two cameras | |
| US10240913B2 (en) | Three-dimensional coordinate measuring apparatus and three-dimensional coordinate measuring method | |
| KR20180056713A (ko) | 형상 측정 장치 및 형상 측정 방법 | |
| US20160356596A1 (en) | Apparatus for measuring shape of object, and methods, system, and storage medium storing program related thereto | |
| JP2008292278A (ja) | 距離検出装置の光学ずれ検出方法及び距離検出装置 | |
| JP6575087B2 (ja) | トロリ線摩耗測定装置 | |
| US9739604B2 (en) | Information processing apparatus, information processing method, and storage medium | |
| JP6475025B2 (ja) | 形状エラー判定装置、判定結果画像生成装置、及び形状エラー判定方法 | |
| JPWO2020171232A1 (ja) | 磁気マーカの診断システム及び診断方法 | |
| JP2020098533A (ja) | 摩耗測定装置および摩耗測定方法 | |
| JP6570321B2 (ja) | 情報処理装置、情報処理方法及びプログラム | |
| JPWO2019163556A1 (ja) | 検査装置及び検査方法 | |
| US20190113336A1 (en) | Multi-Directional Triangulation Measuring System with Method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180330 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180330 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190123 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190129 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190319 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190402 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190423 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6521700 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |