JP6520669B2 - 光学計測装置 - Google Patents
光学計測装置 Download PDFInfo
- Publication number
- JP6520669B2 JP6520669B2 JP2015236965A JP2015236965A JP6520669B2 JP 6520669 B2 JP6520669 B2 JP 6520669B2 JP 2015236965 A JP2015236965 A JP 2015236965A JP 2015236965 A JP2015236965 A JP 2015236965A JP 6520669 B2 JP6520669 B2 JP 6520669B2
- Authority
- JP
- Japan
- Prior art keywords
- light
- light receiving
- cores
- wavelength
- optical
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000003287 optical effect Effects 0.000 title claims description 134
- 238000005259 measurement Methods 0.000 claims description 112
- 238000001514 detection method Methods 0.000 claims description 58
- 238000012545 processing Methods 0.000 claims description 51
- 239000013307 optical fiber Substances 0.000 claims description 32
- 230000009467 reduction Effects 0.000 claims description 20
- 238000005253 cladding Methods 0.000 claims description 17
- 230000004075 alteration Effects 0.000 claims description 11
- 230000003595 spectral effect Effects 0.000 claims description 11
- 230000000644 propagated effect Effects 0.000 claims description 3
- 238000000034 method Methods 0.000 description 22
- 238000010586 diagram Methods 0.000 description 21
- 239000000835 fiber Substances 0.000 description 15
- 230000001965 increasing effect Effects 0.000 description 13
- 238000006073 displacement reaction Methods 0.000 description 7
- 230000008569 process Effects 0.000 description 7
- 230000008859 change Effects 0.000 description 6
- 238000011156 evaluation Methods 0.000 description 5
- 238000005070 sampling Methods 0.000 description 5
- 238000013459 approach Methods 0.000 description 4
- 239000011248 coating agent Substances 0.000 description 4
- 238000000576 coating method Methods 0.000 description 4
- 230000002542 deteriorative effect Effects 0.000 description 4
- 230000001902 propagating effect Effects 0.000 description 4
- 101100438139 Vulpes vulpes CABYR gene Proteins 0.000 description 3
- 101100310674 Tenebrio molitor SP23 gene Proteins 0.000 description 2
- 230000002708 enhancing effect Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 238000000926 separation method Methods 0.000 description 2
- 102100022907 Acrosin-binding protein Human genes 0.000 description 1
- 101000756551 Homo sapiens Acrosin-binding protein Proteins 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000013213 extrapolation Methods 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012805 post-processing Methods 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images

















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/245—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures using a plurality of fixed, simultaneously operating transducers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
- G01B11/06—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness for measuring thickness ; e.g. of sheet material
- G01B11/0608—Height gauges
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J3/00—Spectrometry; Spectrophotometry; Monochromators; Measuring colours
- G01J3/02—Details
- G01J3/0205—Optical elements not provided otherwise, e.g. optical manifolds, diffusers, windows
- G01J3/0218—Optical elements not provided otherwise, e.g. optical manifolds, diffusers, windows using optical fibers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J3/00—Spectrometry; Spectrophotometry; Monochromators; Measuring colours
- G01J3/02—Details
- G01J3/10—Arrangements of light sources specially adapted for spectrometry or colorimetry
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01J—MEASUREMENT OF INTENSITY, VELOCITY, SPECTRAL CONTENT, POLARISATION, PHASE OR PULSE CHARACTERISTICS OF INFRARED, VISIBLE OR ULTRAVIOLET LIGHT; COLORIMETRY; RADIATION PYROMETRY
- G01J3/00—Spectrometry; Spectrophotometry; Monochromators; Measuring colours
- G01J3/28—Investigating the spectrum
- G01J3/2803—Investigating the spectrum using photoelectric array detector
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B6/00—Light guides; Structural details of arrangements comprising light guides and other optical elements, e.g. couplings
- G02B6/02—Optical fibres with cladding with or without a coating
- G02B6/02042—Multicore optical fibres
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B6/00—Light guides; Structural details of arrangements comprising light guides and other optical elements, e.g. couplings
- G02B6/24—Coupling light guides
- G02B6/26—Optical coupling means
- G02B6/28—Optical coupling means having data bus means, i.e. plural waveguides interconnected and providing an inherently bidirectional system by mixing and splitting signals
- G02B6/293—Optical coupling means having data bus means, i.e. plural waveguides interconnected and providing an inherently bidirectional system by mixing and splitting signals with wavelength selective means
- G02B6/29371—Optical coupling means having data bus means, i.e. plural waveguides interconnected and providing an inherently bidirectional system by mixing and splitting signals with wavelength selective means operating principle based on material dispersion
- G02B6/29374—Optical coupling means having data bus means, i.e. plural waveguides interconnected and providing an inherently bidirectional system by mixing and splitting signals with wavelength selective means operating principle based on material dispersion in an optical light guide
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B6/00—Light guides; Structural details of arrangements comprising light guides and other optical elements, e.g. couplings
- G02B6/24—Coupling light guides
- G02B6/36—Mechanical coupling means
- G02B6/3616—Holders, macro size fixtures for mechanically holding or positioning fibres, e.g. on an optical bench
- G02B6/3624—Fibre head, e.g. fibre probe termination
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B2210/00—Aspects not specifically covered by any group under G01B, e.g. of wheel alignment, caliper-like sensors
- G01B2210/50—Using chromatic effects to achieve wavelength-dependent depth resolution
Description
まず、本実施の形態に従う光学計測装置により解決される課題およびそれを実現するための構成について概要を説明する。
次に、本実施の形態に従う光学計測装置が採用するコアの並列化について、その概要を説明する。図2は、本実施の形態に従う光学計測装置が採用するコアの並列化を説明するための模式図である。図2(A)には、関連技術に従う光学計測装置1Aの導光部の構成を模式的に示し、図2(B)には、本実施の形態に従う光学計測装置1の導光部の構成を模式的に示す。
次に、本実施の形態1に従う光学計測装置1の装置構成の一例について説明する。図3は、本実施の形態に従う光学計測装置1の装置構成を示す模式図である。
次に、検出器44として、一次元センサ(ラインセンサ)を採用した構成およびその構成に適した処理について説明する。
次に、検出器44として、二次元センサ(CMOS(Complementary Metal Oxide Semiconductor)イメージセンサ)を採用した構成およびその構成に適した処理について説明する。
次に、検出器44として、二次元センサ(CCD(Charge-Coupled Device)イメージセンサ)を採用した構成およびその構成に適した処理について説明する。
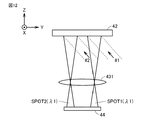
次に、受光部40に採用する縮小光学系43について説明する。本実施の形態に従う光学計測装置1では、複数のコアを有する導光部20を採用するので、対象物2上に複数のスポットが照射され、複数のスポットにそれぞれ対応する複数の反射光が生じることになる。導光部20を構成する光ファイバのコア径およびコア数、ならびに、検出器44の受光素子の大きさ、などに依存して、複数の反射光(例えば、図6に示すスポットSP11およびSP12など)をそのまま計測することで、疑似的に単一のスポットとみなして処理することもできる。
次に、本実施の形態に従う光学計測装置1において採用する複数のコアを含む導光部20に適した構成の一例について説明する。
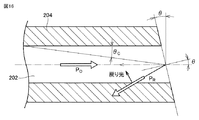
次に、本実施の形態に従う光学計測装置1において採用する導光部20を構成する光ファイバの端面形状の一例について説明する。白色共焦点方式の光学計測装置では、対象物2に対して照射光を照射し、その反射光に基づいて、センサヘッド30から対象物2までの距離を算出する。照射光が対象物2に照射されることなく、光ファイバの射出端面にてそのまま反射されると、計測誤差の原因となり得る。そのため、光ファイバの端面での反射を極力低減することが好ましい。
導光部に用いられる光ファイバには、コアからしみ出した光、および、光源10において直接クラッドに入射する光がクラッドを伝搬する、クラッド伝搬と称される現象が生じ得る。このようなクラッド伝搬によるノイズを低減するために、カプラ231,232と受光部40とを光学的に接続される出力側ケーブル22を棒状の部材の回りに巻き付けられるように配置してもよい。
本実施の形態に従う光学計測装置1は、複数のコアからそれぞれ照射光を照射するとともに、それぞれの照射光によって生じた対象物2からの反射光を計測することで、疑似的に単一のスポットに照射しているとみなして処理する。この照射光の照射パターンを適宜変更することで、対象物2に応じた計測を実現することもできる。以下、スポット照射パターンを動的に変更する処理について説明する。
上述したように、本実施の形態に係る光学計測装置1では、光源10からセンサヘッド30までの導光部、および、センサヘッド30から受光部40までの導光部として、複数のコアを採用することで、導光部内の伝搬損失を低減し、より多くの反射光を検出できるように構成される。これによって、従来構成に比較して、光の利用効率を高めて、より高いサンプリングレートを実現できる。
Claims (10)
- 複数の波長成分を有する照射光を発生する光源と、
前記光源からの照射光に対して軸上色収差を生じさせるとともに、光軸の延長線上に少なくともその一部が配置される計測対象物からの反射光を受光する光学系と、
前記光学系で受光される反射光を各波長成分に分離する分光器と、前記分光器による分光方向に対応させて複数の受光素子が一次元配置された検出器とを含む、受光部と、
前記光学系と前記受光部とを光学的に接続する複数のコアを含む導光部と、
前記受光部の複数の受光素子によるそれぞれの検出値に基づいて、前記光学系から前記計測対象物までの距離を算出する処理部とを備え、
前記導光部および前記受光部は、前記複数のコアに含まれる第1のコアに前記光学系側から第1の波長の第1の光が与えられたときに、前記複数の受光素子のうち当該第1の光が入射する受光素子が、前記複数のコアに含まれる第2のコアに前記光学系側から前記第1の波長の第2の光が与えられたときに、前記複数の受光素子のうち当該第2の光が入射する受光素子の少なくとも一部と共通するように、構成され、
前記光学系は、前記受光部に入射する光の断面形状が前記複数の受光素子の配列方向に長い楕円形状となるように構成される、光学計測装置。 - 前記受光部と光学的に接続される導光部は、それに含まれる複数のコアの並び方向が、前記複数の受光素子の配列方向とは直交する方向に対応付けて配置される、請求項1に記載の光学計測装置。
- 前記処理部は、単一の受光素子に前記複数のコアのそれぞれから照射された複数の光が入射して生じる検出値を一括して取得する、請求項1または2に記載の光学計測装置。
- 複数の波長成分を有する照射光を発生する光源と、
前記光源からの照射光に対して軸上色収差を生じさせるとともに、光軸の延長線上に少なくともその一部が配置される計測対象物からの反射光を受光する光学系と、
前記光学系で受光される反射光を各波長成分に分離する分光器と、検出面上に複数の受光素子が二次元配置された検出器とを含む、受光部と、
前記光学系と前記受光部とを光学的に接続する複数のコアを含む導光部と、
前記光学系から前記計測対象物までの距離を算出する処理部とを備え、
前記処理部は、前記複数のコアに含まれる第1のコアに前記光学系側から第1の波長の第1の光が与えられたときに、当該第1の光が入射する前記検出面上の第1の領域と、前記複数のコアに含まれる第2のコアに前記光学系側から前記第1の波長の第2の光が与えられたときに、当該第2の光が入射する前記検出面上の第2の領域との位置関係に基づいて、前記受光部の複数の受光素子によるそれぞれの検出値から距離を算出し、
前記処理部は、前記複数のコアから照射される同一の波長の光のスポットが前記検出器の検出面上に入射することで生じる強度分布に基づいて、各波長の検出に適合する領域を推定する、光学計測装置。 - 前記処理部は、前記検出器の検出面のうち、前記反射光に含まれ得る各波長の検出に用いるそれぞれの部分領域を決定する、請求項4に記載の光学計測装置。
- 前記受光部は、前記検出器までの光学経路上に配置され、前記導光部に含まれる複数のコアを伝搬して前記受光部へ入射した前記計測対象物からの反射光のスポット径を縮小化する縮小光学系をさらに含む、請求項1〜5のいずれか1項に記載の光学計測装置。
- 前記縮小光学系は、前記計測対象物からの反射光のスポット径を、前記検出器の検出面の縦横比率に応じた特定方向により大きく縮小するように構成されている、請求項6に記載の光学計測装置。
- 前記光源からの照射光を前記導光部に含まれる複数のコアのそれぞれに選択的に与えることができる選択部をさらに備え、
前記処理部は、前記計測対象物の形状に応じて、前記計測対象物への照射光の照射に用いるコアを切り替える、請求項1〜7のいずれか1項に記載の光学計測装置。 - 前記導光部から前記光学系へ照射光を射出する端面は、前記導光部におけるコアとクラッドとの界面の臨界角より大きな角度の傾斜角をもつように構成されている、請求項1〜8のいずれか1項に記載の光学計測装置。
- 前記導光部は、棒状の部材の回りを巻き付けられるように配置された光ファイバを含む、請求項1〜9のいずれか1項に記載の光学計測装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015236965A JP6520669B2 (ja) | 2015-12-03 | 2015-12-03 | 光学計測装置 |
| CN201611059428.9A CN107063127B (zh) | 2015-12-03 | 2016-11-25 | 光学测量装置 |
| US15/363,286 US9995624B2 (en) | 2015-12-03 | 2016-11-29 | Optical measurement device |
| EP16201365.0A EP3176538B1 (en) | 2015-12-03 | 2016-11-30 | Optical measurement device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015236965A JP6520669B2 (ja) | 2015-12-03 | 2015-12-03 | 光学計測装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017102067A JP2017102067A (ja) | 2017-06-08 |
| JP6520669B2 true JP6520669B2 (ja) | 2019-05-29 |
Family
ID=57442554
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015236965A Active JP6520669B2 (ja) | 2015-12-03 | 2015-12-03 | 光学計測装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9995624B2 (ja) |
| EP (1) | EP3176538B1 (ja) |
| JP (1) | JP6520669B2 (ja) |
| CN (1) | CN107063127B (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6610518B2 (ja) * | 2016-11-30 | 2019-11-27 | 株式会社ダイフク | 検査装置 |
| JP7408265B2 (ja) * | 2017-06-13 | 2024-01-05 | 株式会社キーエンス | 共焦点変位計 |
| JP2019066259A (ja) * | 2017-09-29 | 2019-04-25 | オムロン株式会社 | 光学センサおよび光学センサにおける異常検出方法 |
| JP6939360B2 (ja) * | 2017-10-02 | 2021-09-22 | オムロン株式会社 | 共焦点計測装置 |
| JP6969453B2 (ja) * | 2018-03-12 | 2021-11-24 | オムロン株式会社 | 光学計測装置 |
| US10704904B2 (en) * | 2018-03-20 | 2020-07-07 | Pixart Imaging Inc. | Distance detection device |
| JP7121606B2 (ja) * | 2018-09-11 | 2022-08-18 | 浜松ホトニクス株式会社 | 光計測装置 |
| JP6986235B2 (ja) * | 2018-12-20 | 2021-12-22 | オムロン株式会社 | 共焦点センサ |
| US11480664B2 (en) * | 2019-06-05 | 2022-10-25 | Pixart Imaging Inc. | Optical detection device of detecting a distance relative to a target object |
| DE102019122866A1 (de) * | 2019-08-26 | 2019-10-24 | Precitec Optronik Gmbh | Optische Messvorrichtung |
| US11162783B1 (en) * | 2020-12-18 | 2021-11-02 | Yoed Abraham | Fiber-optic 3D imaging |
| JP2022107367A (ja) * | 2021-01-08 | 2022-07-21 | オムロン株式会社 | 変位センサ |
| JP2022112634A (ja) * | 2021-01-22 | 2022-08-03 | 株式会社ディスコ | 計測装置 |
| CN112832958B (zh) * | 2021-02-20 | 2024-03-08 | 中国华能集团清洁能源技术研究院有限公司 | 一种基于光色散的风机塔筒倾斜监测装置及方法 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19713362A1 (de) * | 1997-03-29 | 1998-10-01 | Zeiss Carl Jena Gmbh | Konfokale mikroskopische Anordnung |
| AU2000262934A1 (en) | 2000-07-05 | 2002-01-14 | Biophyderm Sa | Device for in vivo cutaneous optical tomobiopsy |
| US7123798B2 (en) * | 2002-03-29 | 2006-10-17 | Ngk Insulators, Ltd. | Optical device and method of producing the same |
| US7745357B2 (en) * | 2004-03-12 | 2010-06-29 | Georgia-Pacific Gypsum Llc | Use of pre-coated mat for preparing gypsum board |
| JP4867355B2 (ja) * | 2006-01-17 | 2012-02-01 | リコープリンティングシステムズ株式会社 | マルチビーム光源および光走査装置、画像形成装置 |
| JP2009043383A (ja) * | 2007-08-10 | 2009-02-26 | Sanyo Electric Co Ltd | 光ピックアップ装置 |
| DE112008002244B4 (de) | 2007-08-31 | 2013-07-25 | Abb Ltd. | Bahndickenmessgerät |
| EP2293011A1 (de) * | 2009-09-07 | 2011-03-09 | Siemens Aktiengesellschaft | Prüfvorrichtung, Prüfapparatur und Prüfverfahren für Profilnuten |
| FR2950441B1 (fr) * | 2009-09-23 | 2012-05-18 | Sabban Youssef Cohen | Capteur optique dote de champ lateral pour la numerisation 3d |
| US8989539B2 (en) * | 2009-11-03 | 2015-03-24 | 3M Innovative Properties Company | Fiber optic devices and methods of manufacturing fiber optic devices |
| JP5790178B2 (ja) * | 2011-03-14 | 2015-10-07 | オムロン株式会社 | 共焦点計測装置 |
| DE102012111008B4 (de) | 2012-11-15 | 2014-05-22 | Precitec Optronik Gmbh | Optisches Messverfahren und optische Messvorrichtung zum Erfassen einer Oberflächentopographie |
| JP5966982B2 (ja) * | 2013-03-15 | 2016-08-10 | オムロン株式会社 | 共焦点計測装置 |
| CN103364105B (zh) * | 2013-07-12 | 2015-03-25 | 华南师范大学 | 基于多模干涉的光纤折射率与温度传感器及其测量方法 |
| US10191213B2 (en) * | 2014-01-09 | 2019-01-29 | Globalfoundries Inc. | Shielding structures between optical waveguides |
| US9664855B2 (en) * | 2014-03-07 | 2017-05-30 | Skorpios Technologies, Inc. | Wide shoulder, high order mode filter for thick-silicon waveguides |
| CN105091787B (zh) * | 2014-05-06 | 2018-01-16 | 北京智朗芯光科技有限公司 | 实时快速检测晶片基底二维形貌的装置 |
-
2015
- 2015-12-03 JP JP2015236965A patent/JP6520669B2/ja active Active
-
2016
- 2016-11-25 CN CN201611059428.9A patent/CN107063127B/zh active Active
- 2016-11-29 US US15/363,286 patent/US9995624B2/en active Active
- 2016-11-30 EP EP16201365.0A patent/EP3176538B1/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20170160130A1 (en) | 2017-06-08 |
| US9995624B2 (en) | 2018-06-12 |
| EP3176538A1 (en) | 2017-06-07 |
| JP2017102067A (ja) | 2017-06-08 |
| CN107063127B (zh) | 2020-06-30 |
| CN107063127A (zh) | 2017-08-18 |
| EP3176538B1 (en) | 2019-04-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6520669B2 (ja) | 光学計測装置 | |
| JP7268766B2 (ja) | 光学計測装置 | |
| CN110672034B (zh) | 光学测量装置 | |
| JP5060678B2 (ja) | 光学式変位計 | |
| KR20180099673A (ko) | 공초점 변위계 | |
| JP2019002720A (ja) | 共焦点変位計 | |
| JP2022069677A (ja) | 光測定用光源装置、分光測定装置及び分光測定方法 | |
| TWI673474B (zh) | 光學測量裝置 | |
| JP2016080692A (ja) | 光学式エンコーダ | |
| KR102125483B1 (ko) | 공초점 계측 장치 | |
| JP6615604B2 (ja) | 共焦点変位計 | |
| JP7296239B2 (ja) | 光学計測装置、光学計測方法、及び光学計測プログラム | |
| JP7218946B2 (ja) | 一対多光ファイバアレイの構造および方法 | |
| JP6766911B2 (ja) | 光学計測装置 | |
| JP7070614B2 (ja) | 光学計測装置 | |
| US10859438B2 (en) | Ultraminiature endoscopy | |
| JP7238541B2 (ja) | 分光測定装置及び分光測定方法 | |
| JP2006308403A (ja) | 分光ユニット | |
| CN114303044A (zh) | 用于光学应用的装置 | |
| JP5239885B2 (ja) | 光導波路の検査方法、光コネクタ、及び、光学装置 | |
| JP2020020815A (ja) | 共焦点変位計 | |
| JP2013252256A (ja) | イメージガイドおよび撮像装置 | |
| JP2009229116A (ja) | 光学測定装置 | |
| JP2007183117A (ja) | 波長計測装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171025 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180913 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180925 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181121 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190402 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190415 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6520669 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |