以下、本発明を実施するための例示的な実施形態及び実施例を、図面を参照して詳細に説明する。ただし、以下の説明は例示的なものであり、当該説明によって本発明が限定されるものではない。また、以下の実施形態及び実施例で説明する寸法、材料、形状、構成要素の相対的な位置等は任意であり、本発明が適用される装置の構成又は様々な条件に応じて変更できる。なお、本明細書において、手とは手首から指先までの部分であり、掌部とは手の一部であり、指以外の部分を指す。手の特性情報とは、手、特に指の内部の血管や骨などの生体組織(吸収体)の分布に関連する情報を指す。特性情報は、反射率や透過率、吸収率など光学的な特性を数値データとしてではなく、手の内部の吸収体の各位置の分布情報として求めてもよい。さらに、特性情報は、画像化するために輝度や色の情報を付与した画像データであってもよい。また、上下とは重力方向における上方向と下方向とにそれぞれ対応する。
本発明の一実施形態は、光を用いた血管の撮影装置、撮影システム、撮影方法及び撮影装置で用いられる支持部材、特に関節リウマチに伴う関節近傍の新生血管群を撮影する撮影装置、撮影システム、撮影方法及び撮影装置で用いられる支持部材に関する。以下、図1乃至7を参照して、本発明の一実施形態による撮影装置について説明する。
まず、図1を参照して本発明の一実施形態による撮影装置の撮影対象となる人体の手、特に掌部の法線と各指の基節骨とのなす角度について説明する。
図1は、左手を手の甲側から俯瞰した模式図である。図1は、掌部の法線101、第一指107、第二指108、第三指109、第四指110、第五指111、及び各指の基節骨102,103,104,105,106を示す。
図1に示す掌部の法線101は、指を開いた状態における掌部の面、すなわち掌又は手の甲の面に対して略垂直な方向に定義される。
基節骨102,103,104,105,106は、それぞれ第一指107、第二指108、第三指109、第四指110及び第五指111の付け根から第二関節までの部位にある骨である。図1には、各基節骨102,103,104,105,106の向きを示す線112,113,114,115,116も示される。
また、図1には、掌部の法線と各基節骨とのなす角の例として、掌部の法線101と基節骨104の軸の向き114とのなす角度117もあわせて示される。
本発明の一実施形態による撮影装置は、所定の形状を有する支持部(支持部材)を備えることで、被験者の手を掌部の法線と各指の基節骨とのなす角が互いに異なる状態で支持することができる。これにより、本発明の一実施形態による撮影装置は、撮影された画像において各関節が重ならないように、複数の指の関節側部を同時に撮影可能な指の配置を安定的に実現することができる。
なお、掌部の法線は図1に示される一本の線に限られず、掌部の面に対して略垂直であるような同じ傾きを有する線を意味する。そのため、掌部の法線は、掌部の面に対して略垂直であるような同じ傾きを有し、それぞれ各基節骨の向き・方向と交わるように、各指に対して各々設定することができる。この場合、各法線は同じ傾きを有するため、同じ方向に延在する。そのため、同じ傾きを有する各法線と各基節骨とのなす角度は、各基節骨が1つの基準線に対してなす角度と等しいことが理解されることができる。ここで、図1に示される掌部の法線101は、基節骨104の向き114とのなす角度を説明するために例示された法線である。
以下、本発明の一実施形態による撮影装置を透過撮影用の光学系を用いて説明するが、本発明による撮影は透過照明光を用いた透過撮影に限られず、反射照明光を用いた反射撮影でも良いし、あるいは透過撮影と反射撮影を併用する構成であってもよい。
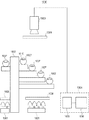
図2は本発明の一実施形態による撮影装置200の概略図である。
図2に示すように、撮影装置200には、光源201、支持部202、検出器203、及び信号処理部(取得部)204が設けられている。また、信号処理部204には、制御処理PC205及びモニタ206が設けられている。なお、図2には、支持部202に支持された人体の手の指207及び指の爪210がさらに示されており、指207は指先の方向から示されている。また、図2には、任意選択的な構成として、光学素子208,209が示されている。
光源201は、支持部202に支持されている手に対して近赤外光(約0.7乃至2.5μm)を照射する。手に対して照射された近赤外光は、生体の透過率が高い発光波長を有するため、手の指207等の部分を透過する。また、光源201が発する光は近赤外光に限られず、生体の透過率が高い波長の光であれば良い。なお、撮影に近赤外光を用いる場合には、被爆を防止する等の撮影に伴うリスクの低減を行うことができる。
光源201としては、生体の透過率が高い近赤外の発光波長を有するLEDなどを用いることが可能である。なお、光源201はLEDに限られるものではなく、レーザーやSLD(Super Luminescent Diode)であっても良い。安価で面積が大きく、光量が多い光源を構成する場合には、LEDをアレイ状に配置した光源を用いることもできる。
次に支持部202について説明する。支持部202は、掌部の法線と撮影対象となる各指の基節骨とのなす角度が各指で互いに異なる状態で手の指207を支持することができる。このため、光源201は、同時に複数の指207の複数の関節の側方に対して所定の方向からの光を照射することができ、撮影装置200は同時に複数の指207の複数の関節を側方から撮影することができる。
支持される手の具体的な支持状態の例を図3及び図4に示す。
図3には、掌部301、第一指302、第二指303、第三指304、第四指305及び第五指306が示されている。図3では、第一指302から第五指306が、掌部301に対してそれぞれ異なる所定の角度で曲げられている。図3に示される支持状態では、第一指302、第二指303、第三指304、第四指305及び第五指306は、第五指306から第一指302に向かうにつれ順番に掌側へ曲がる角度が大きくなるような状態で支持される。そのため、掌部の法線と各指302,…,306の基節骨とのなす角度が互いに異なっている。
図4は別の支持状態の例を示す。図4には、掌部401,第一指402,第二指403,第三指404,第四指405,及び第五指406が示されている。図4においても、第一指401から第五指406が、掌部401に対してそれぞれ異なる所定の角度で曲げられている。しかしながら、図4に示す支持状態では、第一指402,第二指403,第三指404,第四指405及び第五指406は、第一指402から第五指406に向かうにつれ順番に掌側へ曲がる角度が大きくなるような状態で支持される。このような支持状態でも、掌部の法線と各指402,…,406の基節骨とのなす角度を互いに異ならせることができる。
このような支持状態を実現するため、支持部202は手を所定の状態で支持するための形状を有する。支持部202の形状としては、例えば図5に示すような形状とすることができる。なお、支持部202の構成としては、簡易な構成で軽量化が容易な手動制御用の構成であってもよいし、自動制御や精密制御が容易な電動機構を有する構成であってもよい。なお、支持部202が電動機構を有する場合には、制御処理PC205によって支持部202の形状を制御することができるように撮影装置200を構成することができる。
図5は、支持部202の構成例として、支持部501を示す。なお、図5において支持部501に支持される指の例として、第二指506が示されている。
図5に示す支持部501は螺旋階段状に構成されており、支持部501には指を配置する配置部502と回転軸503が設けられている。配置部502は水平な部位であり、指を安定して配置するために用いることができる。配置部502は回転軸503を中心として回転可能なように、直接に又は任意の部材を介して回転軸503に接続されている。また、配置部502はその高さも可変であるように回転軸503に接続されている。すなわち、支持部501は、螺旋階段状の形状の1段毎(配置部502毎)の高さ及び回転角が可変であり、支持部501全体としての形状が可変である。そのため、支持部501では、複数の配置部502間の互いに対する高さ及び互いになす角度507を変化させることが可能である。これにより、被検者ごとに手の大きさや基節骨同士がなしうる角度等が異なること及び撮影条件の違いに応じた、各指を支持する高さ及び基節骨同士のなす角507の設定などを行うことができる。例えば、複数の指の第一関節の側部を同時に撮影する場合には、基節骨同士のなす角度507をあまり大きくする必要はない。しかしながら、複数の指の第二関節を同時に撮影したい場合には、第一関節の撮影の場合と比較して基節骨同士のなす角度507としてより大きな角度を必要とする。そのため、各配置部502を回転軸503のまわりで回転させることで、各配置部502に配置される指の基節骨同士のなす角507を撮影すべき関節位置等に応じて調整することができる。したがって、配置部502の位置関係を調整することで、掌部の法線と各基節骨とのなす角を調整することができる。
また、撮影装置200で透過撮影を行う場合には、配置部502を撮影光に対して透過率が高い部材、例えばアクリル板等で構成することができる。この場合、配置部502を遮光部材504で覆い、また配置部502の一部に遮光部材504が無い光透過部505を設けることもできる。これにより、撮影装置200は、配置部502に配置された指の所定の部位のみを透過した光に基づいて撮影を行うことができ、不要な光による影響を抑え、より明瞭な撮影画像を構成することができる。なお、透過撮影において、被験者の指506の脇から漏れ出て検出器に到達する漏れ光(不図示)を抑制するため、光透過部505の幅は被験者の指の幅よりも狭い形状に設定することができる。
撮影装置200で透過撮影を行う場合には、支持部202は、光源201と検出器203の間に配置される。この場合、観察対象となる手が配置されていない状態、あるいは手の内部で光が散乱されずに直進する場合には光源201から射出した光がそのまま検出器203に到達する。そのため、この配置では、散乱体内で散乱を受けなかった光を検出器203で検出することができる。したがって、撮影装置200は、生体内で散乱を受けない光を抽出し鮮明な血管像を取得することができる。
次に検出器203及び信号処理部204について説明する。
検出器203は光源201から発せられる光の波長に対して感度を有する検出器である。検出器203は、支持部202で支持された手を透過した光(透過光)を検出し、検出した光に基づいて電気信号を生成する。検出器203は、生成した電気信号を信号処理部204に送信し、信号処理部204の制御処理PC205は受信した電気信号に基づいて手の特性情報を取得し、画像を構成する。構成された画像はモニタ206に送られ、モニタ206は構成された画像を表示する。
検出器203としては、光源201から発せられる光の波長が1μm以下の場合には、Si系の光検出素子を有するカメラやビデオカメラなどを用いることができる。また、光源201から発せられる光の波長が1μm以上の場合には、例えばInGaAs系の光検出素子を有するカメラやビデオカメラ等を検出器203として用いることができる。
なお、検出器203のカメラレンズとして、カメラレンズの硝材が光源201から発せられる光の波長(光源波長)に対して高い透過率を有するカメラレンズを用いることができる。同様に、光源波長に合わせてカメラレンズの無反射コーティングを最適化することもできる。
制御処理PC205は、CPU、MPU、メモリ、及び任意の入力装置等を備えることができる。制御処理PC205は、検出器203からの信号の処理用に特化されたコンピュータであっても良いし、信号の処理用のソフトウエアを備えた汎用のコンピュータであっても良い。また、制御処理PC205は、クラウド上のサーバ等で構成されていてもよい。
撮影の際は、単一画像を撮影する他に、例えば複数の画像を撮影し、撮影画像を平均化することで画像内のランダムノイズを抑制する処理などを施すこともできる。複数の画像を撮影する方法としては、写真を連写する方法、あるいは動画を撮影しておき、動画から各コマを単一画像として抽出する方法を用いることができる。さらに、制御処理PC205で画像を積算する際には単純な加算平均により画像を平均化する処理を行っても良いし、複数枚の画像撮影の間に被験者の手が動く場合を想定して、画像処理による位置合わせ処理を併用した処理を行っても良い。
また、手の複数の関節を同時に撮影するため、各関節から検出器203までの距離が関節ごとに互いに異なることが想定される。そのため、検出器203として用いられているカメラは、撮影時にその被写界深度内に撮影対象となる複数の関節がすべて収まるように撮影を行うことができる。あるいは、ピント位置、すなわちフォーカス位置をずらして高速に複数回連写する撮影方法を用いることも可能である。
また、本実施形態による撮影装置200の用途は、撮影対象となる手のすべての指のすべての関節を同時に撮影する用途に限られない。本実施形態による撮影装置200は、例えば親指(第一指)以外の指の関節だけを撮影する、あるいは人差し指(第二指)と中指(第三指)と薬指(第四指)の関節を撮影する、などの一部の関節を撮影する用途にも用いることができる。注目領域(撮影対象)となる関節の数が少ない場合は、照射光の照射領域や検出器での撮影領域も注目領域に併せて限局することで、迷光の抑制や必要な被写界深度の低減を行うことができる。
本実施形態による撮影装置200は、支持部202を用いて、掌部の法線と撮影対象となる各指207の基節骨とのなす角度が基節骨同士で互いに異なる、手の支持状態を実現可能である。そのため、光源201は、支持部202が掌部の法線と各指207の基節骨とのなす角が互いに異なるように手を支持した状態で、異なる指の複数の関節の側部に対して光を照射することができる。すなわち、撮影装置200は、支持部202が掌部の法線と各指207の基節骨とのなす角が互いに異なるように各指207を支持した状態で、異なる指の複数の関節の側部を同時に撮影することができる。撮影装置200は、手の指の複数の関節を同時に側方から撮影可能であるため、短時間で複数の指関節の状態を評価することができ、患者や医師の負荷を低減することができる。
また、図2に示すように、光源201の前に拡散板等の光学素子208を配置することで、観察物体、すなわち人体の手へ照射する光の強度分布を平坦化することができる。観察対象の血管が深い部位にある場合には、血管周囲の脂肪層などの生体内の散乱組織によって照射光が散乱されるため、検出器203で検出した光に基づく血管像がぼけて薄くなり、撮影画像には血管がかすかな暗部として写る。そのため、撮影画像上の輝度分布を、血管による僅かな光吸収に起因するものと、照射光源自体が持っている空間的な光強度分布に起因するものとに識別することが難しい場合がある。そこで、撮影画像上の輝度分布を、血管による僅かな光吸収に起因するものと、照射光源自体が持っている空間的な光強度分布に起因するものとに識別し易くするためにも、光学素子208等を用いて照射光源の光強度分布をなるべく少なくすることができる。
さらに、光源201と手との間に、及び手と検出器203の間に偏光板を挿入することもできる。これにより、照明光を或る偏光成分に限定し、被験物体を透過した光のうち偏光を維持している成分と偏光を解消している成分の弁別することができる。生体内組織で散乱を受けていない光は偏光成分が維持されているため、この観察手法により、無偏光撮影と比較して生体内散乱による像のボケの影響を抑制した画像取得を行うことができる。
本実施形態による撮影装置200では、LED光源を用いたが、生体のように光の散乱率や吸収率が高く、光の透過率が低い物体を透過照明するために、照射スポット径が小さい高輝度光源として、レーザー光源を用いることもできる。レーザー光源は、照射位置を精密に制御、規定できるため、透過照明及び反射照明どちらにも用いることができる。
また、レーザー光はコリメートすることができるため、レーザー光源を用いて散乱体を平行光束で照明することが可能である。散乱体内で散乱された光(散乱光)は入射方向と異なる方向に伝搬するため、伝搬方向で散乱を受けなかった光(直進光)と散乱光を弁別可能である。直進光成分を抽出し画像を構成すれば、散乱光の影響を抑制したボケの少ない血管像を構成可能である。また、反射照明を行う場合においても、平行光束を散乱体表面に垂直に入射させ、散乱体内で一度だけ後方散乱を受けて散乱体から垂直に戻る光を検知し画像化することで、散乱光の影響を抑制した画像を構成することが可能である。
さらに、手に照射される光の波長(光源波長)は単一波長でも良いし、あるいは異なる波長の光を発する複数の光源を用いて、それぞれの波長に切り替えて撮影を行うこともできる。なお、発する光の波長を異なる波長に切り替えることができる光源を用いても良いし、同時に複数の波長で発光する光源を用いても良い。同時に複数波長の光を手に照射する場合には、検出器の手前の光路で、図2に示すような波長カットフィルタ等の光学素子209によって撮影に用いる波長(撮影波長)の切り替えを行っても良い。この場合、撮影波長として、被検者の手の透過率及び散乱率、並びに血液の光吸収スペクトル等を考慮し、血管像のコントラストが最も高くなる波長を選択することできる。
また、支持部202に関しては、撮影された画像に基づいて支持部202の形状を手動又は自動で制御するように撮影装置200を構成することもできる。
例えば、手の動画を撮影し、当該動画に基づいて支持部202の形状制御を行うことができる。この場合には、まず光検出部203が動画撮影を行う。そして、制御処理PC205が光検出部203からの電気信号を取り込んで動画データを作成し、動画データを解析し、撮影対象となる関節同士が重なり無く撮影できているかの判定をリアルタイムで行う。術者又は制御処理PC205は、当該判定結果に基づいて、支持する手の各指の関節の側方が同時に撮影可能となるように、支持部202の形状制御を行うことができる。なお、関節の重なりの判定は、撮影された動画に基づいて術者が行うこともできる。
また、仮撮影(当たり撮影)を行って静止画像を取得し、この静止画像に基づいて各指の関節の側方が同時に撮影可能となるような適切な手の支持形状、すなわち撮影対象となる関節同士の重なりの無い支持形状を見出すこともできる。この場合には、まず光検出部203で当たり撮影を行う。そして、制御処理PC205が光検出部203からの電気信号を取り込んで静止画像データを作成し、静止画像データを解析し、撮影対象となる関節同士が重なり無く撮影できているかの判定を行う。術者又は制御処理PC205は、関節同士が重なっていると判定した場合、取得された静止画像に基づいて支持する手の各指の関節の側方が同時に撮影可能となるように、支持部202を形状制御することができる。なお、関節の重なりの判定は、撮影された静止画像に基づいて術者が行うこともできる。
さらに、上記実施形態では、支持部202の形状の例として図5に示す支持部501を挙げた。しかしながら、支持部202の形状はこれに限られない。図6及び7は、支持部202の形状の別例である支持部601,701をそれぞれ示す。
図6は、指全体を支持する形状ではなく、指の先端部分、すなわち指の先端から第一関節までの間の部分のみを支持する形状を有する支持部601を示す。図6は、各指を支持するための支持部(指支持部)601、掌部602、第一指603、第二指604、第三指605、第四指606及び第五指607を示す。
支持部601はその位置や向き、高さが可変であるように構成されている。支持部601を用いて左手を支持する場合、掌部602から伸びる第一指603から第五指607の先端のみが支持部601によって支持される。この時、各支持部601のそれぞれの位置、高さ及び各指を迎え入れる向きを適切に調節することにより、各指の基節骨が掌部の法線に対してなす角度を互いに変化させ、互いに異ならせることが可能である。
支持部601の構成では、撮影対象となる関節に対して照射される照射光の光路を支持部が遮る面積を小さくするあるいは無くすことが可能であり、支持部の部材の選択自由度が広がるという利点がある。また、支持部の部材の透過率スペクトルを考慮する必要が無いため、照明光の波長選択性の自由度も増大するという利点がある。さらに、支持部の軽量化も容易に行うことができる。
また支持部601の構成の場合、例えば照明光としてレーザー光などの細径コリメート光を用いることで、指と指の間から検出器203側に漏れる光を抑制できる。
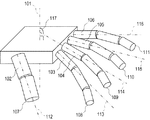
さらに、支持部202を図7に示す支持部701のように構成することもできる。図7は、支持部701が左手を支持している様子を表す模式図である。図7は、支持部701、第一指702、第二指703、第三指704、第四指705、第五指706及び駆動部材709を示す。
図7に示す支持部701は円錐面を有する形状に形成されている。支持部701は例えば薄いアクリル板など、照明光に対して高い透過率を有し、且つ変形可能な光学部材で構成することができる。撮影装置によって透過撮影を行う場合には、この円錐面の下部より照明光を照射し、被検者の手の各指を通り抜けた光を検出器で検知する。この場合には、各指702,…,706が支持部701の斜面(円錐面)710に沿って配置されるため、斜面710に従って掌部に対して各指の曲がる角度を互いに異ならせることができる。そのため、掌部の法線と各指の基節骨とのなす角度を互いに異ならせることができる。
この支持部701の斜面710が略水平な支持部701の底面となす角度を45度よりも小さくすることもできる。これは、斜面710の角度が45度よりも小さいと、複数関節が互いに重なることなく同時に撮影可能な状態を作り易いためである。
また、支持部701の端部707,708の間には両端部を結ぶ駆動部材709が設けられており、駆動部材709は支持部701の端部707,708の間隔を変化させることができる。すなわち、支持部701は駆動部材709を用いて形状が可変であるように構成されている。各指は斜面710に沿って配置されるため、駆動部材709により支持部701の斜面710の曲率半径を変化させることで、支持される手の指の基節骨同士がなす角度を変化させることができる。
なお、支持部202の例として、支持部501,601,701について説明したが、支持部の形状はこれらに限られない。支持部の形状は、掌部の法線と撮影対象となる各指の基節骨とのなす角度が各指で互いに異なる状態で手の指207を支持することができる形状であればよい。また、支持部の形状が可変である場合には、被験者の手の大きさや基節骨の可動範囲の違いや撮影条件の違いに応じて支持部の形状を変更することができる。また、支持部501、601では掌部の法線と各基節骨とのなす角度の調整はすべての指に対して可能であってもよいし、また装置構成の簡略化のために一部の指に対して可能であってもよい。
また、本実施形態による撮影装置200では、支持部202の下方に光源201を配置し、支持部202の上方に検出器203を配置したが、撮影装置における光源及び検出器の配置はこれに限られない。例えば、図2に示す撮影装置200において、光源201と検出器203の位置を入れ替えた配置も可能である。
さらに、撮影装置の構成は、図2に示す撮影装置200のように光源201から検出器203までの光路が略鉛直方向である構成に限られず、光路が水平方向である構成としても良い。
また、本実施形態による撮影装置200では、手を透過した光を検出するために光源201及び検出器203が互いに対向するように配置されている。しかしながら、光源及び検出器の配置はこれに限られない。例えば、光源から射出された光が支持部まで伝搬する方向と、手から射出した光が検出器まで伝搬する方向が異なっていても良い。このような配置では、前述の配置とは逆に、検出器は散乱体内で散乱されて伝搬方向が入射方向から変化した光を検出することができる。したがって、生体内で散乱した光による血管画像を取得したい場合などに、このような配置を有する撮影装置を用いることができる。
また、光源201からの光が手を照射することなく撮影装置200の内部で反射・散乱し迷光となって検出器203に到達する事を抑制するために、光源201の周囲あるいは支持部202の周囲を暗幕などで囲うことができる。さらに、撮影装置200全体を小型暗室等で囲い、小型暗室の内壁面を、低反射の暗幕や植毛紙で構成することや、低反射塗料などで塗装した内面とすることもできる。
なお、撮影装置200では、検出器203が生成した電気信号に基づいて、信号処理部204の制御処理PC205が手の特性情報を取得し画像を構成する。しかしながら、当該処理を撮影装置200の外部に設けた処理装置(取得部)で行うこともできる。この場合、信号処理部204は検出器203が生成した電気信号を撮影装置200の外部に設けた処理装置に送信し、処理装置が当該電気信号に基づいて手の特性信号を取得し画像を構成して、構成した画像を信号処理部204に送信する。信号処理部204は受信した画像をモニタ206に表示する。なお、構成した画像を他のモニタ等に送信して当該他のモニタで画像を表示させるように処理装置を構成しても良い。また、撮影装置200の外部に設けた処理装置において、構成した複数の撮影画像の平均化や位置合わせ等の画像処理を行ったり、構成した撮影画像に基づいて照明光等の撮影条件の制御に関する情報を生成したりすることもできる。さらに、構成した撮影画像に基づいて被検体支持具202の形状制御に関する情報を生成し、制御処理PC205に送信するように当該処理装置を構成することもできる。これらの場合、術者や制御処理PC205は処理装置から送られてくる情報又はモニタに表示された情報に基づいて、撮影条件の制御や被検体支持具202の形状制御を行うことができる。なお、当該処理装置は例えばLANやWAN等を介して接続されたサーバや汎用のコンピュータ等を用いて構成することができる。
さらに、撮影装置200は、支持部として上述のような立体的な形状の支持部202の他に、平面状の支持部を別途備えることができる。平面状の支持部上に手を配置した状態でさらに手を撮影することで、手の関節を掌側あるいは手の甲側から撮影することができる。したがって、立体的な支持部と平面的な支持部を併用することで、指の関節を手の側方から、更には手の甲側及び掌側からも撮影することができる。
また、図2に示す形状の支持部202の場合には、手の置き方を変え、指の腹に対して垂直に光を照射することもできる。
図10は、この場合の撮影装置の概略図である。図10は、図2に示す撮影装置200と同様の撮影装置1000を示す。図10に示される撮影装置1000には、光源1001、支持部1002、検出器1003、信号処理部1004、及び光学素子1008,1009が設けられ、信号処理部1004には、制御処理PC1005及びモニタ1006が設けられている。図10には、支持部1002に支持された人体の手の指1007及び指の爪1010がさらに示されている。
図10に示すように、手の置き方を掌が光源1001の方を向くように変えることで、指の腹に対して垂直に光を照射することができる。この場合には、検出器1003が、指の腹に対して垂直に照射されて手を透過した光を検出することで、関節を掌側から撮影することが可能である。また、手の置き方を手の甲が光源1001の方を向くように変えることで、指の背に対して垂直に光を照射することができ、関節を手の甲側から撮影することができる。
以下、図8を参照して、本発明の実施例1による撮影装置について説明する。図8は、本実施例による撮影装置800を示す概略図である。また、本実施例による撮影装置800における支持部802の形状と同様の支持部の形状を示す図として図5を参照する。
本実施例による撮影装置800には、光源801、支持部802、撮影カメラ803、光源駆動電源804、制御処理PC805、及びモニタ806が設けられている。また、図8には指807も示されており、指807は指先の方向から示されている。さらに、図8には任意選択的な構成として、偏光子808,809が示されている。
光源801は、手に対して波長940nmの光を照射し、撮影カメラ803は手を透過した光(透過光)を検出し、検出した光に基づいて電気信号を生成する。ここで、光源801は波長940nmの光を発するLEDをアレイ状に並べたものであり、撮影カメラ803は波長940nmの光に感度を有している。
支持部802は、光源801と撮影カメラ803との間に配置され、被験者の手を所定の支持状態で支持する。支持部802は、図5に示す螺旋階段状の形状を有し、指807を配置するための5つの配置部811を備える。また、支持部802は、図5中の配置部502同士のなす角度507に対応する、配置部811同士のなす角度を変化させることが可能なように、配置部811が回転軸503に対応する回転軸を中心として回転可能に構成されている。さらに、支持部802は、各配置部811の高さも変更することができるように構成されている。なお、支持部802の配置部811は遮光部810を有し、配置部811のその他の部位は近赤外光の透過率が高いアクリル板を素材として用いて構成されている。これにより、撮影装置800は、配置部811に配置された指807の所定の部位のみを透過した光に基づいて撮影を行うことができ、不要な光による影響を抑え、より明瞭な撮影画像を構成することができる。
制御処理PC805は、撮影カメラ803で生成した電気信号を取り込む。制御処理PC805は、取り込んだ電気信号に基づいて画像データを生成し、生成した画像データをモニタ806に表示する。これにより、術者はモニタ806に表示される手の指807の撮影結果を確認することができる。さらに複数の関節の位置関係を変化させて撮影する場合には、手動又は自動で支持部802の形状を変化させて、支持部802によって掌部の法線と各指の基節骨とのなす角度が各指で互いに異なる状態で手を支持して、再度撮影を行う。
制御処理PC805は生成した画像データに基づいて画像の輝度を適切に調整する。制御処理PC805は、撮影画像内の注目領域を設定し、この領域内の最大輝度が撮影カメラ803を飽和させないように、すなわち撮影カメラ803の所定の飽和閾値を超えないように、光源駆動電源804を用いて光源801の光量を制御することができる。また、制御処理PC805は、撮影カメラ803の感度や露出時間を適切に調節することができる。
また、制御処理PC805は、撮影カメラ803を用いて連続して10枚の画像を撮影した後、画像の加算平均処理を行うことで、撮影カメラ803等が有するランダムノイズを低減させることができる。この際、制御処理PC805は、画像内の特徴点として、例えば指の輪郭や特徴的な血管構造を抽出し、当該特徴点に基づいて、撮影した10枚の画像の位置合わせを行ってから加算平均処理を行う。これにより、制御処理PC805は、ランダムノイズの低減された、より正確な画像を構成することができる。
撮影装置800によって被験者の手を撮影する手順について概略的に述べる。撮影時には、まず、被験者の手を支持部802上に配置する。次に光源801で手に対して光を照射し、撮影カメラ803によって被験者の手を透過した光を検出し、検出光に基づいて電気信号を生成する。その後、生成された電気信号に基づいて、制御処理PC805で電気信号を処理して撮影画像を構成する。
この際、制御処理PC805は、撮影画像に基づいて撮影対象となる関節が重なり無く撮影可能な配置になっているかを判定する。もし、制御処理PC805が撮影対象となる関節が重なっていると判定した場合には、術者は、関節をすべて同時に重なり無く撮影可能となるように支持部802の形状を変化させて、再度撮影を行う。そのため、撮影装置800は、撮影対象となる関節をすべて同時に重なり無く撮影可能とした状態で関節の画像を撮影することができる。なお、支持部802を電動の構成とする場合には、制御処理PC805が、関節の重なりの判定に基づいて支持部802の形状を自動的に変化させることもできる。この場合、制御処理PC805は、撮影画像において撮影対象となる関節が重なっている場合には、撮影対象となる関節をすべて同時に重なり無く撮影可能となるように支持部802の形状を変化させる。なお、撮影画像に基づく関節の重なりの判定は、制御処理PC805の代わりに術者によって行われることもできる。
本実施例による撮影装置800によれば、支持部802を用いて、掌部の法線と基節骨とのなす角度が基節骨同士で互いに異なる、手の支持状態を実現可能である。そのため、光源801は、支持部802が掌部の法線と各指807の基節骨とのなす角が互いに異なるように手を支持した状態で、異なる指の複数の関節の側部に対して光を照射することができる。したがって、本実施例による撮影装置800は、手の指807の複数の関節を同時に側方から撮影可能であり、短時間で複数の指関節の状態を評価することができ、患者や医師の負荷を低減することができる。
さらに、手を手の甲側あるいは掌側から垂直に撮影するために、支持部802を不図示の平面状の支持部に交換して、撮影対象となる手の関節を再度撮影することができる。このようにして撮影された撮影画像により、術者が、手の複数の関節について側方、掌側及び手の甲側から状態を把握することできる。
また、本実施例による撮影装置800では、光源801と指807の間に偏光子808が配置され、撮影カメラ803と指807との間に偏光子809が配置されることができる。この場合、撮影装置800は、光源801を出て偏光子808及び撮影カメラ803の前の偏光子809を通る光によって撮影対象となる関節を撮影することができる。当該撮影は、偏光子808と偏光子809を用いて、クロスニコルとオープンニコルでそれぞれ行われ、撮影した画像は制御処理PC805によって互いに比較される。当該構成により、照明光を或る偏光成分に限定し、撮影対象となる指807を透過した光のうち偏光を維持している成分と偏光を解消している成分の弁別することができる。生体内組織で散乱を受けていない光は偏光成分が維持されているため、この観察手法により、無偏光撮影と比較して生体内散乱による像のボケの影響を抑制した画像取得を行うことができる。
実施例1による撮影装置800では、透過撮影用の光学系を用いて手の指の関節の撮影を行う構成とした。これに対し、撮影装置に反射撮影用の光学系を用いることも可能である。以下、図9を参照して反射撮影用の光学系を用いた本発明の実施例2による撮影装置について説明する。なお、支持部の形状制御や、制御処理PCによる画像処理や照明光の制御等は実施例1による撮影装置800での制御及び処理等と同様であるため、相違点を中心として説明する。
図9は、本実施例による撮影装置900の概略図である。図9に示された撮影装置900には、広帯域光源901、支持部902、撮影カメラ903、光源制御装置904、制御処理PC905、モニタ906、照射光光学系908、及びバンドパスフィルタ909が設けられている。
広帯域光源901は800nmから880nmの波長の光を指907に対して照射する。広帯域光源901の前には、照明光光学系908が設けられており、照明光光学系908は広帯域光源901からの照射光を平行光束に近づけることができる。
広帯域光源901から照射された光は手の指907によって反射され、反射された光は撮影カメラ903によって検出される。この際、撮影カメラ903の前にあるバンドパスフィルタ909によって、指907により反射された光から880nmの波長を有する光を選択することができる。撮影カメラ903は当該選択された光を検出し、検出した光に基づいて電気信号を生成する。
撮影カメラ903によって生成された電気信号は制御処理PC905に送られ、制御処理PC905は当該電気信号に基づいて撮影画像を生成する。
広帯域光源901からの光が手の指907によって反射される際には、撮影される画像において、撮影対象となる関節同士が重ならないように支持部902が手を支持する。
上記構成により、本実施例による反射光学系を用いた撮影装置900においても、光源901は、支持部902が掌部の法線と各指の基節骨とのなす角が互いに異なるように手を支持した状態で、異なる指の複数の関節の側部に対して光を照射することができる。したがって、本実施例による撮影装置900においても手の指の複数の関節を同時に側方から撮影可能である。
さらに、バンドパスフィルタ909を、800nmの波長を有する光を選択透過するフィルタに交換して撮影を行うことより、異なる波長での光による画像情報を取得することも可能である。
また、バンドパスフィルタ909は、800nm又は880nmの波長を有する光を透過するものに限られず、任意の波長の光を選択透過するように構成することができる。なお、バンドパスフィルタの配置位置は撮影カメラ903の直前に限られず、広帯域光源901から指907の間の光路中にバンドパスフィルタを配置しても良い。
なお、バンドパスフィルタ909を撮影カメラ903の直前に配置する場合、偏光子を併せて用いても良い。これにより、光源901から照射された光が指表面で正反射された成分に基づく画像上のテカリの写り込みを抑制することが可能である。
また、図9に示すように、例えば撮影対象を第一指(親指)以外の第二指(人差し指)、第三指(中指)、第四指(薬指)及び第五指(小指)に限局することも可能である。なお、撮影対象の限局は反射撮影だけでなく透過撮影においても可能である。
以上、実施形態及び実施例を参照して本発明について説明したが、本発明は上記実施形態及び実施例に限定されるものではない。本発明の趣旨に反しない範囲で変更された発明、及び本発明と均等な発明も本発明に含まれる。また、上述の各実施形態及び実施例は、本発明の趣旨に反しない範囲で適宜組み合わせることができる。