JP6449713B2 - 動作補助装置 - Google Patents
動作補助装置 Download PDFInfo
- Publication number
- JP6449713B2 JP6449713B2 JP2015088486A JP2015088486A JP6449713B2 JP 6449713 B2 JP6449713 B2 JP 6449713B2 JP 2015088486 A JP2015088486 A JP 2015088486A JP 2015088486 A JP2015088486 A JP 2015088486A JP 6449713 B2 JP6449713 B2 JP 6449713B2
- Authority
- JP
- Japan
- Prior art keywords
- pair
- power
- electric motor
- drive source
- power transmission
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000012530 fluid Substances 0.000 claims description 80
- 230000033001 locomotion Effects 0.000 claims description 76
- 230000007246 mechanism Effects 0.000 claims description 75
- 230000005540 biological transmission Effects 0.000 claims description 70
- 238000004804 winding Methods 0.000 claims description 22
- 210000000689 upper leg Anatomy 0.000 description 67
- 210000001624 hip Anatomy 0.000 description 51
- 210000002414 leg Anatomy 0.000 description 32
- 210000003414 extremity Anatomy 0.000 description 14
- 238000006243 chemical reaction Methods 0.000 description 12
- 230000009467 reduction Effects 0.000 description 11
- 210000004394 hip joint Anatomy 0.000 description 9
- 238000005452 bending Methods 0.000 description 8
- 238000010586 diagram Methods 0.000 description 6
- 238000000034 method Methods 0.000 description 6
- 101001131829 Homo sapiens P protein Proteins 0.000 description 5
- 230000008859 change Effects 0.000 description 5
- 102000047119 human OCA2 Human genes 0.000 description 5
- 239000000463 material Substances 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 238000010248 power generation Methods 0.000 description 4
- 238000001514 detection method Methods 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 239000011347 resin Substances 0.000 description 3
- 229920005989 resin Polymers 0.000 description 3
- 230000007423 decrease Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000003638 chemical reducing agent Substances 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 239000004744 fabric Substances 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 210000004197 pelvis Anatomy 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images










Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0237—Stretching or bending or torsioning apparatus for exercising for the lower limbs
- A61H1/0244—Hip
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
- A61H2003/007—Appliances for aiding patients or disabled persons to walk about secured to the patient, e.g. with belts
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/12—Driving means
- A61H2201/1207—Driving means with electric or magnetic drive
- A61H2201/1215—Rotary drive
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/12—Driving means
- A61H2201/1238—Driving means with hydraulic or pneumatic drive
- A61H2201/1246—Driving means with hydraulic or pneumatic drive by piston-cylinder systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/14—Special force transmission means, i.e. between the driving means and the interface with the user
- A61H2201/1463—Special speed variation means, i.e. speed reducer
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/14—Special force transmission means, i.e. between the driving means and the interface with the user
- A61H2201/1481—Special movement conversion means
- A61H2201/149—Special movement conversion means rotation-linear or vice versa
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1628—Pelvis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/164—Feet or leg, e.g. pedal
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/165—Wearable interfaces
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5058—Sensors or detectors
- A61H2201/5069—Angle sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2205/00—Devices for specific parts of the body
- A61H2205/08—Trunk
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2205/00—Devices for specific parts of the body
- A61H2205/10—Leg
- A61H2205/108—Leg for the upper legs
Landscapes
- Health & Medical Sciences (AREA)
- Epidemiology (AREA)
- Pain & Pain Management (AREA)
- Physical Education & Sports Medicine (AREA)
- Rehabilitation Therapy (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Rehabilitation Tools (AREA)
- Manipulator (AREA)
Description
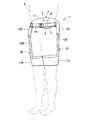
まず、図1〜図5を参照して第1実施形態に係る歩行補助装置1について説明する。
次に、図6を参照して第2実施形態に係る歩行補助装置1について説明する。なお、第1実施形態と形態又は機能が同一又は同様の要素には同一の符号を付し、重複する説明は省略する。以下の実施形態においても同様とする。
次に、図7を参照して第3実施形態に係る歩行補助装置1について説明する。なお、図7は、歩行補助装置1の腰部を模式的に示しており、動力伝達経路の方向転換機構を省略している。そのため、下方に向けて互いに平行に延びるべき左右のアーム16L、16Rが左右に向けて延びるように示されている。
次に、図8〜図11を参照して第4実施形態に係る歩行補助装置1について説明する。
2 腰部装着具
3L、3R 大腿部装着具
4 電動モーター
5 制御装置
11 腰部サポータ
12L、12R サイドフレーム
13 腰フレーム
18 アウタ部材
19 インナ部材
20 動力伝達機構
20L 左動力伝達機構
20R 右動力伝達機構
22 ディファレンシャルギヤ機構
25R 第1駆動軸
38 カウンタギヤ
53 ベアリング(軸支機構)
60 主ラックアンドピニオン
61 主ピニオン
62A 第1主ラック
62B 第2主ラック
63、64 副ラックアンドピニオン
65、66 副ピニオン
67A、68A 第1副ラック
67B、68B 第2副ラック
69L、69R 巻き掛け部材
70 流体ポンプ
71L、71R 流体アクチュエータ
76a 第1ポンプ室
77a 第2ポンプ室
82aL、82aR 第1流体室
83aL、83aR 第2流体室
91 第1通路
92 第2通路
93 第3通路
94 第4通路
Claims (5)
- 装着者の身体の動作を補助する動作補助装置であって、
装着者の身体の左右の肢体に装着される少なくとも1対の装着部と、
動力を発生する単一の駆動源と、
前記駆動源の動力を前記1対の装着部に対して分配する差動部と、
前記駆動源の動力を前記1対の装着部に対して互いに逆相の運動として伝達する動力伝達部とを備え、
前記駆動源は電動機であり、
前記差動部は差動ギヤ機構を含み、
前記動力伝達部は、前記差動ギヤ機構の一方の出力端と対応する装着部との間に設けられたカウンタギヤを含むことを特徴とする動作補助装置。 - 装着者の身体の動作を補助する動作補助装置であって、
装着者の身体の左右の肢体に装着される少なくとも1対の装着部と、
動力を発生する単一の駆動源と、
前記駆動源の動力を前記1対の装着部に対して分配する差動部と、
前記駆動源の動力を前記1対の装着部に対して互いに逆相の運動として伝達する動力伝達部とを備え、
前記駆動源は、アウタ部材及び当該アウタ部材に回転自在に保持されたインナ部材を有する電動機であり、
前記差動部及び前記動力伝達部は、前記アウタ部材を固定フレームに回転自在に保持する軸支機構と、前記アウタ部材と前記1対の装着部の一方とを連結する第1伝達機構と、前記インナ部材と前記1対の装着部の他方とを連結する第2伝達機構とを含むことを特徴とする動作補助装置。 - 装着者の身体の動作を補助する動作補助装置であって、
装着者の身体の左右の肢体に装着される少なくとも1対の装着部と、
動力を発生する単一の駆動源と、
前記駆動源の動力を前記1対の装着部に対して分配する差動部と、
前記駆動源の動力を前記1対の装着部に対して互いに逆相の運動として伝達する動力伝達部とを備え、
前記駆動源は電動機であり、
前記動力伝達部は、前記電動機により回転駆動される主ピニオン及び当該主ピニオンにより互いに異なる向きに駆動される1対の主ラックを含む主ラックアンドピニオンと、前記1対の装着部の一方に対応して設けられ、前記1対の主ラック間に掛け渡された第1巻き掛け部材と、前記1対の装着部の他方に対応して設けられ、前記1対の主ラック間に掛け渡された第2巻き掛け部材とを含み、
前記差動部は、前記1対の主ラックのそれぞれに設けられた1対の副ラックアンドピニオンを含み、各副ラックアンドピニオンが、前記1対の主ラックの対応するものに回転自在に保持された副ピニオン、及び互いに異なる向きに移動するように前記副ピニオンに噛合する1対の副ラックを含み、それぞれの副ラックアンドピニオンにおいて前記1対の副ラックの一方に前記第1巻き掛け部材が連結され、前記1対の副ラックの他方に前記第2巻き掛け部材が連結されたことを特徴とする動作補助装置。 - 装着者の身体の動作を補助する動作補助装置であって、
装着者の身体の左右の肢体に装着される少なくとも1対の装着部と、
動力を発生する単一の駆動源と、
前記駆動源の動力を前記1対の装着部に対して分配する差動部と、
前記駆動源の動力を前記1対の装着部に対して互いに逆相の運動として伝達する動力伝達部とを備え、
前記駆動源は、第1ポンプ室及び第2ポンプ室を有する複動ピストン式の流体ポンプであり、
前記動力伝達部及び前記差動部は、前記1対の装着部に対応して設けられ、それぞれ第1流体室及び第2流体室を有する、複動ピストン式の1対の流体アクチュエータと、前記第1ポンプ室を一方の前記流体アクチュエータの前記第1流体室に連通させる第1通路と、前記第2ポンプ室を他方の前記流体アクチュエータの前記第1流体室に連通させる第2通路と、一方の前記流体アクチュエータの前記第2流体室を前記第2ポンプ室に連通させる第3通路と、他方の前記流体アクチュエータの前記第2流体室を前記第1ポンプ室に連通させる第4通路とを含むことを特徴とする動作補助装置。 - 前記1対の装着部が装着された肢体が互いに逆相の動作をする場合に動力を発生させ、前記1対の装着部が装着された肢体が互いに同相の動作をする場合に動力を発生させないように前記駆動源の動力を制御する制御装置を更に備えることを特徴とする請求項1〜請求項4のいずれかに記載の動作補助装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015088486A JP6449713B2 (ja) | 2015-04-23 | 2015-04-23 | 動作補助装置 |
| US15/134,725 US10786417B2 (en) | 2015-04-23 | 2016-04-21 | Motion assist device |
| CN201610257388.2A CN106063759B (zh) | 2015-04-23 | 2016-04-22 | 动作辅助装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015088486A JP6449713B2 (ja) | 2015-04-23 | 2015-04-23 | 動作補助装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016202620A JP2016202620A (ja) | 2016-12-08 |
| JP6449713B2 true JP6449713B2 (ja) | 2019-01-09 |
Family
ID=57147126
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015088486A Active JP6449713B2 (ja) | 2015-04-23 | 2015-04-23 | 動作補助装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10786417B2 (ja) |
| JP (1) | JP6449713B2 (ja) |
| CN (1) | CN106063759B (ja) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3068360B1 (en) * | 2013-11-12 | 2020-07-08 | Ekso Bionics, Inc. | Machine to human interfaces for communication from a lower extremity orthotic |
| KR102167182B1 (ko) * | 2014-07-29 | 2020-10-16 | 삼성전자주식회사 | 구동 모듈 및 이를 포함하는 운동 보조 장치 |
| WO2016128877A1 (en) * | 2015-02-09 | 2016-08-18 | Scuola Superiore Di Studi Universitari E Di Perfezionamento Sant'anna | Actuation system for hip orthosis |
| JP6553577B2 (ja) * | 2016-11-04 | 2019-07-31 | 本田技研工業株式会社 | 動作補助装置及び動力伝達機構 |
| JP6781091B2 (ja) * | 2017-03-28 | 2020-11-04 | 本田技研工業株式会社 | 肢体動作支援装置 |
| CN106943278A (zh) * | 2017-04-18 | 2017-07-14 | 上海理工大学 | 中央驱动式下肢外骨骼机器人 |
| FR3076589B1 (fr) * | 2018-01-09 | 2019-12-20 | Commissariat A L`Energie Atomique Et Aux Energies Alternatives | Actionneur reversible a deux axes non synchronises avec un seul moteur |
| KR102012800B1 (ko) * | 2018-04-24 | 2019-08-21 | 연세대학교 원주산학협력단 | 차동기어를 이용한 외골격 보조장치 및 그 제어방법 |
| IT201800009207A1 (it) * | 2018-10-05 | 2020-04-05 | Scuola Superiore Di Studi Univ E Di Perfezionamento Sant'anna | Gruppo di trasmissione di coppia con mezzi sensori di coppia |
| IT201800009202A1 (it) * | 2018-10-05 | 2020-04-05 | Scuola Superiore Di Studi Univ E Di Perfezionamento Sant'anna | Sistema di attuazione ad uscite multiple per giunti robotici |
| IT201800009210A1 (it) * | 2018-10-05 | 2020-04-05 | Scuola Superiore Di Studi Univ E Di Perfezionamento Sant'anna | Robot attivo indossabile con articolazione di schiena |
| IT201800009213A1 (it) * | 2018-10-05 | 2020-04-05 | Scuola Superiore Di Studi Univ E Di Perfezionamento Sant'anna | Gruppo di sottoattuazione per robot attivo indossabile |
| JP7112969B2 (ja) * | 2019-01-11 | 2022-08-04 | トヨフレックス株式会社 | 動作補助装置 |
| USD927072S1 (en) * | 2019-05-16 | 2021-08-03 | Gordana Gehlhausen | Leg lift strap |
| JP2020189377A (ja) * | 2019-05-22 | 2020-11-26 | 株式会社クボタ | アシスト器具 |
| CN110496016B (zh) * | 2019-08-21 | 2021-10-22 | 浙江大学宁波理工学院 | 一种辅助行走装置 |
| CN111067683B (zh) * | 2019-11-30 | 2021-09-07 | 九江市宏德防雷技术有限公司 | 一种人体关节修复可调支架 |
| CN111685975B (zh) * | 2020-07-21 | 2022-08-23 | 黄河科技学院 | 腰部助力外骨骼 |
| EP4176858A1 (en) * | 2021-11-08 | 2023-05-10 | Vrije Universiteit Brussel | Exoskeleton |
| CN114083518B (zh) * | 2021-12-02 | 2023-08-29 | 中国科学技术大学 | 基于轻量化双向驱动助力的膝部柔性外骨骼装置及外骨骼 |
| CN114870345B (zh) * | 2022-05-30 | 2023-03-31 | 商丘市第一人民医院 | 一种加速康复用多功能训练器械及其训练方法 |
| CN115781639B (zh) * | 2022-11-24 | 2023-05-16 | 极壳科技(上海)有限公司 | 一种基于单驱动执行器的轻量化人体助力装置 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1142259A (ja) * | 1997-07-28 | 1999-02-16 | Technol Res Assoc Of Medical & Welfare Apparatus | 歩行補助装具 |
| JP2000166997A (ja) | 1998-12-10 | 2000-06-20 | Nsk Ltd | 歩行補助装置 |
| EP1547568B1 (en) * | 2002-08-30 | 2013-01-02 | Honda Giken Kogyo Kabushiki Kaisha | Speed reducer for walk assist apparatus |
| JP4271712B2 (ja) * | 2007-10-15 | 2009-06-03 | 本田技研工業株式会社 | 運動補助装置 |
| WO2009122559A1 (ja) * | 2008-03-31 | 2009-10-08 | パナソニック電工株式会社 | 運動補助装置 |
| JP5021574B2 (ja) | 2008-06-19 | 2012-09-12 | 本田技研工業株式会社 | 歩行補助装置 |
| US8603016B2 (en) * | 2010-01-11 | 2013-12-10 | Honda Motor Co., Ltd. | Walking assistance device |
| JP2012121119A (ja) * | 2010-12-10 | 2012-06-28 | Satoshi Ito | 二足歩行ロボットの股関節構造 |
| EP2910228B1 (en) * | 2012-10-19 | 2018-08-08 | Nikon Corporation | Assist apparatus |
| CN103919659B (zh) * | 2014-04-21 | 2016-03-02 | 安阳工学院 | 一种肩关节自主康复训练器 |
| CN104116613B (zh) * | 2014-07-17 | 2016-05-25 | 蒋文庆 | 一种智能上肢辅助运动装置 |
| CN104127300B (zh) | 2014-07-31 | 2016-04-20 | 安阳工学院 | 一种大臂左右摆动康复训练装置 |
| CN203970821U (zh) | 2014-07-31 | 2014-12-03 | 安阳工学院 | 一种大臂上下摆动康复训练器 |
| KR102125078B1 (ko) * | 2014-08-07 | 2020-06-19 | 삼성전자주식회사 | 구동 모듈, 구동 모듈을 포함하는 운동 보조 장치 및 운동 보조 장치의 제어 방법 |
| CN105055122B (zh) * | 2015-08-26 | 2017-07-18 | 安阳工学院 | 一种反向运动双侧上肢康复训练器 |
-
2015
- 2015-04-23 JP JP2015088486A patent/JP6449713B2/ja active Active
-
2016
- 2016-04-21 US US15/134,725 patent/US10786417B2/en active Active
- 2016-04-22 CN CN201610257388.2A patent/CN106063759B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US10786417B2 (en) | 2020-09-29 |
| CN106063759A (zh) | 2016-11-02 |
| JP2016202620A (ja) | 2016-12-08 |
| CN106063759B (zh) | 2019-09-20 |
| US20160310344A1 (en) | 2016-10-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6449713B2 (ja) | 動作補助装置 | |
| JP6553577B2 (ja) | 動作補助装置及び動力伝達機構 | |
| KR102529879B1 (ko) | 구동 모듈 및 이를 포함하는 운동 보조 장치 | |
| KR101836413B1 (ko) | 근력 보조를 위한 의복형 착용로봇용 텐던장치 | |
| ITRM20120482A1 (it) | Dispositivo robotico per l'assistenza e la riabilitazione degli arti inferiori. | |
| CA2608459C (en) | Controller for walking assistance device | |
| JP5697947B2 (ja) | 下肢動作支援装置 | |
| JP5525751B2 (ja) | 歩行ロボット | |
| US20080312049A1 (en) | Control Device and Control Program of Walking Assisting Device | |
| JP6030737B2 (ja) | 関節の駆動装置 | |
| KR20240024874A (ko) | 동력 전달 기기, 운동 보조 장치 및 그 제어 방법 | |
| KR20170021018A (ko) | 하지 보조로봇의 골격구조 | |
| JP4092322B2 (ja) | 歩行補助装置 | |
| KR20170075699A (ko) | 하지 보조로봇의 골격구조 | |
| JP2011104035A (ja) | 歩行補助装具 | |
| JP2011212122A (ja) | 装着型補助装置 | |
| KR200458671Y1 (ko) | 근력 보조 장치 | |
| CN111096875B (zh) | 一种柔性承力腰背机构及其助力支架和轻便助力设备 | |
| JP5937935B2 (ja) | 装着型動作補助装置 | |
| CN101254147B (zh) | 具有两自由度髋关节辅助运动的外骨骼 | |
| JP5844054B2 (ja) | 装着型動作支援装置 | |
| CN108420575A (zh) | 用于辅助蹲座的穿戴假肢及使用方法 | |
| ITRM20120539A1 (it) | Ortesi motorizzata di caviglia e ginocchio. | |
| JP6202351B2 (ja) | 動作補助装置用アクチュエータ及び動作補助装置 | |
| JP7470278B2 (ja) | アシストウェア |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181002 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180928 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181114 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181206 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6449713 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |